
国際特許分類[A61B17/28]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992) | 手術用鉗子 (668)
国際特許分類[A61B17/28]の下位に属する分類
切断器具を伴うもの
低侵襲手術で使用するための鉗子
国際特許分類[A61B17/28]に分類される特許
81 - 90 / 668
手術用器具
【課題】非侵襲性を確保しつつ、操作性・強度に優れ、パーツ脱落のおそれも少ない手術用器具を提供する。
【解決手段】本発明に係る手術用器具は、主軸部と、第一の把持部と、主軸部に対し第一の把持部を折り曲げる第一の折曲部と、第二の把持部と、第一の把持部に対し第二の把持部を折り曲げる第二の折曲部と、第三の把持部と、第二の把持部に対し第三の把持部を折り曲げる第三の折曲部と、を有し、第一の把持部、第二の把持部、第三の把持部の延伸方向を同じくした場合に、第一の折曲部と第三の折曲部の折曲面は同一面であって、第一の折曲部と第二の折曲部の折曲面は垂直となっているものである。
(もっと読む)
双極電極構成において電流密度を発生させる最適配置

【課題】電気外科器具と共に使用される端部エフェクターアセンブリを提供すること。
【解決手段】電気外科器具と共に使用される端部エフェクターアセンブリが提供される。端部エフェクターアセンブリは、組織接触表面の第一のペアを有する第一のジョー部材およびその間に配置された絶縁体を有する。端部エフェクターアセンブリは、また、組織接触表面の第二のペア、組織接触表面の第二のペアの間に配置された絶縁体のペアおよび絶縁体のペアの間に配置された切断要素を含む第二のジョー部材を有する。第一のジョー部材の第二のジョー部材への相対的な動きは、第一のジョー部材の絶縁体および第二のジョー部材の第二のジョー部材の絶縁体のペアに、第一のジョー部材と第二のジョー部材との間に配置された組織をピンチ留めさせる。
(もっと読む)
把持ツールの遠隔操作のための手動式装置
【課題】本発明は、例えば、様々な外科機器及び診断ツールを身体の領域内で、又は領域内へと遠隔操作するのに有用な、関節機構を提供する。
【解決手段】本発明では、機構の近位端(106、107、121、606、806、1711、1801)における、分節(A1、B1、D1)の運動は、機構の遠位端(108、109、123、604、808、1721、1822)での分節(A2、B2、D2)の対応する運動をもたらす。近位及び遠位分節は、各近位区間が遠位分節と共に個別の対を形成するようなやり方で、ケーブルの組(104)によって連結される。この構成によって、各分節対が、互いに独立して運動することが可能になり、また、関節機構が、複雑な運動を行い、複雑な構成を採用することが可能になる。関節機構はまた、目的物又は体組織の操作のために、指の運動を離れたところで模倣するような方法で組み合わせることができる。
(もっと読む)
医療用ロボットシステム
【課題】患者に対する医療用器具の位置及び角度の調整を簡易に行うことができるとともに、統合型システムとして多機能化を図りやすい医療用ロボットシステムを提供する。
【解決手段】医療用ロボットシステム10は、手術ロボット14と、可動ベッド16と、画像診断装置18とを備える。手術ロボット14は、マニピュレータ28a、28b及び内視鏡30がそれぞれ先端に取り付けられた複数のアーム22a〜22cを有する。可動ベッド16は、ステーション12上に設置され、ステーション12上で位置、向き及び姿勢を変更可能に構成されている。システム制御部42は、手術ロボット14、可動ベッド16及び画像診断装置18の動作を制御する。
(もっと読む)
把持ツールの遠隔操作のための手動式装置
【課題】本発明は、例えば、様々な外科機器及び診断ツールを身体の領域内で、又は領域内へと遠隔操作するのに有用な、関節機構を提供する。
【解決手段】本発明では、機構の近位端(106、107、121、606、806、1711、1801)における、分節(A1、B1、D1)の運動は、機構の遠位端(108、109、123、604、808、1721、1822)での分節(A2、B2、D2)の対応する運動をもたらす。近位及び遠位分節は、各近位区間が遠位分節と共に個別の対を形成するようなやり方で、ケーブルの組(104)によって連結される。この構成によって、各分節対が、互いに独立して運動することが可能になり、また、関節機構が、複雑な運動を行い、複雑な構成を採用することが可能になる。関節機構はまた、目的物又は体組織の操作のために、指の運動を離れたところで模倣するような方法で組み合わせることができる。
(もっと読む)
柔軟性手首部を持つ心臓組織アブレーション器具
【課題】安全な配置を容易にし、アブレーションカテーテルまたは心臓組織アブレーション(Cardiac Tissue Ablation;CTA)治療におけるその他のデバイスの視覚的検証を提供するための柔軟性手首部を持つ関節低侵襲手術器具を提供すること。
【解決手段】一実施形態において、当該器具は、細長いシャフトと、当該シャフトの作業端にある柔軟性手首部と、当該柔軟性手首部の先端にある視覚スコープレンズとを有する内視鏡である。当該柔軟性手首部は、所望の関節を提供するために、少なくとも1自由度を有する。当該手首部は、シャフトの遠位端にあるハウジング内に位置する駆動機構によって作動および制御される。
(もっと読む)
駆動力伝達機構及びマニピュレータシステム
【課題】湾曲動作時に動力伝達部材の伝達効率が低下しない(伝達特性が悪化しない)駆動力伝達機構及び該駆動力伝達機構を具備するマニピュレータシステムを提供すること。
【解決手段】駆動源からの駆動力を伝達する駆動力伝達機構1を次のように構成する。すなわち、線状或いは棒状で可撓性を有する操作ワイヤ95,96と、操作ワイヤ95,96が挿通された可撓性を有する案内部材である内側パイプ2と、内側パイプ2の径方向外側に設けられ、内側パイプ2の変形を抑制する外側パイプ3と、を駆動力伝達機構1に具備させる。
(もっと読む)
内視鏡外科手術用鉗子
【課題】
従来のストレート形状鉗子では、手術の際に隣り合う鉗子の操作部が干渉するため、術者の作業性が低下する。従来の挿入部に内挿されるロッドに使用される材料は鉄製であり、かつ、その形状は棒状である。挿入部の形状はロッドの形状に依存するために、挿入部の形状を湾曲させることができないという問題がある。
【解決手段】
延長部側をストレート形状では無くすことによって、従来のストレート形状鉗子のように、手術の際に隣り合う鉗子同士が干渉することが無くなる。干渉しないため、術者の作業性が低下することが無く、干渉させないようにするために、鉗子挿入口を複数設ける必要も無くなる。その結果、患者の身体への負担が軽減される。
(もっと読む)
マニピュレータ
【課題】相対的に小さい把持力量で対象物を把持できる状態と、より大きく、かつ調整可能な把持力量を発生させることができる状態とを使い分けることができるマニピュレータを提供する。
【解決手段】回動軸13で連結され、先端側に開閉する把持部14を有する第1鉗子片11及び第2鉗子片12を備えたマニピュレータ1は、一対の鉗子片の基端側に接続され、軸線方向に進退させることにより一対の鉗子片を開閉させる操作部材20と、第1のバネ定数を有し、弾性変形することにより把持部14に発生する把持力量を第1のバネ定数と操作部材20の牽引量とに基づいて変化させる第1緩衝部15B、16Bと、第1緩衝部15B、16Bの弾性変形を規制するストッパ17A、18Aとを備えることを特徴とする。
(もっと読む)
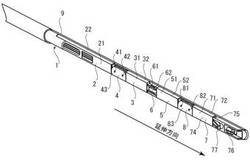
鉗子支持装置
【課題】内視鏡映像を固定した状態での鉗子操作を可能とする鉗子支持装置を提供する。
【解決手段】内視鏡5を保持する内視鏡保持部20と、該内視鏡保持部20を内視鏡円周方向での回転可能に保持するベース部30と、鉗子40を支持し、前記ベース部30に対して鉗子延長方向での前後動可能に取り付けられる鉗子支持部50と、前記ベース部30が保持する前記内視鏡保持部20を内視鏡円周方向に回転させる第1駆動手段60と、前記鉗子支持部50および前記ベース部30を前記内視鏡保持部20を支点に内視鏡円周方向に回転させる第2駆動手段70と、前記鉗子支持部50を鉗子延長方向で前後動させる第3駆動手段80と、から鉗子支持装置1を構成する。
(もっと読む)
81 - 90 / 668
[ Back to top ]