
国際特許分類[B23P19/02]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | プレスばめによる対象物結合用,またはプレスばめ取外し用 (303)
国際特許分類[B23P19/02]の下位に属する分類
油圧または空圧による手段を使うもの
振動を使うもの
国際特許分類[B23P19/02]に分類される特許
11 - 20 / 303
組立ロボットとその制御方法
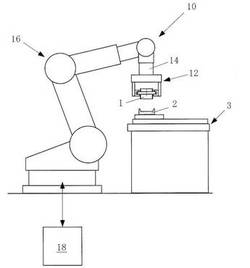
【課題】ワークを対象物に複数の動作で組み付ける場合に、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができる組立ロボットとその制御方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ハンドに作用する外力を検出する力センサ14と、3次元空間内でハンドの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置18とを備え、(A)各動作における組付け方向の外力の最大値を記憶し、(B)ロボットアーム16を制御して各動作を順次実行し、(C)各動作の実行中に、力センサ14で検出された組付け方向の外力が、各動作における最大値に達したときに、ロボットアーム16を停止する。
(もっと読む)
筒状シール部材の圧入方法およびそれに用いる治具

【課題】円盤状フランジ部が倒れるように変形することを抑制できる筒状シール部材の圧入方法およびそれに用いる治具を提供する。
【解決手段】筒状シール部材200は、軸方向一端側から相手部材21の外周面21aに圧入される円筒部210と、円盤状フランジ部220と、円筒部210の軸方向一端と円盤状フランジ部220の内周端とを連結し且つ両面を湾曲形状に形成した湾曲連結部230とを備える。治具400,500により筒状シール部材200の湾曲連結部230の凹状湾曲面を軸方向一端側に向かって押し付けて、円筒部210の軸方向一端側から相手部材21に圧入する。
(もっと読む)
プーリアッセンブリー圧入方法、及び、プーリアッセンブリー圧入装置
【課題】ドライブプーリ及びドリブンプーリにベルトを巻き掛けて形成されるアッセンブリーをミッションケースに圧入する際に、ドライブプーリ及びドリブンプーリの軸方向の相対位置がずれないように圧入できるようにする。
【解決手段】入力軸11に装着されるドライブプーリ20と、出力軸12に装着されるドリブンプーリ30と、これらプーリ20,30に巻き掛けられるVベルト13とを有するプーリアッセンブリー15をミッションケース40に圧入するプーリアッセンブリー圧入方法において、入力軸11と出力軸12との軸間距離、及び、Vベルト13の位置を固定治具53で固定するアッセンブリー固定工程と、固定治具53で固定されたプーリアッセンブリー15をミッションケース40に移動し、ミッションケース40に圧入する圧入工程と、固定治具53を取り外す治具取り外し工程とを有する。
(もっと読む)
ロボットシステム
【課題】シャフトに対して環状部品を嵌合する組立作業をロボットによって自動的に行う場合に、歩留まりを向上させること。
【解決手段】ロボットシステムは、環状部品の内周面と係合する係合部材を周面に取付け可能なシャフトを把持して回動させるロボットと、前記環状部品を固定するための冶具と、前記環状部品が嵌合された前記シャフトを前記ロボットによって把持させ、該環状部品を前記冶具へ接触させた状態で、前記ロボットによって該シャフトへ回動力を付加させる制御部と、前記回動力を付加させた場合における前記ロボットの動作に基づいて前記シャフトへ前記係合部材が取付け済みか否かを判定する判定部とを備える。
(もっと読む)
弾性部材の圧入装置及び圧入方法
【課題】 グロメットのような弾性部材を圧入する際、多大な押圧力を必要とせずにスムーズに圧入できるようにし、圧入装置の小型化、簡素化が図れるようにする。
【解決手段】 第1シリンダ部材2の先端部にグロメットGを保持する筒状の着座部材6を設け、第1シリンダ部材2の先端側内部と着座部材6の筒内に第2シリンダ部材7を設ける。第1シリンダ部材2のシリンダ内で進退動自在な第1ピストンロッド4にエア供給穴5を設け、エア供給穴5と第2シリンダ室8とを連通孔15で連通させ、第1ピストンロッド4の中間部に第2ピストン12を設けて第2シリンダ部材7の内壁に摺接させる。第2シリンダ部材7の先端部に形成される一対の第1押圧部材21でグロメットGの周縁2箇所を押圧できるようにし、第2ピストンロッド13の先端に螺合する第2押圧部材14でグロメットGの中央部分を押圧できるようにする。
(もっと読む)
アンテナの取付け装置
【課題】アンテナに対する自動インストール作業を実現でき、且つ効率よく、容易に操作することもできるアンテナの取付け装置を提供すること。
【解決手段】本発明に係るアンテナの取付け装置は、主体部、第一湾曲アーム及び第二湾曲アームを含み、且つ外力によって水平方向において回転するか又は垂直方向において上下に移動することができる回転部材を備える。前記第一湾曲アームは、連接ロッド及び吸着ロッドを含み、前記第二湾曲アームは、連接ロッド及びプッシュロッドを含み、前記第一湾曲アーム及び前記第二湾曲アームの連接ロッドの一端は、皆前記主体部の一端に連接され、前記吸着ロッドは、中空に成形され且つその自由端には吸盤が設けられ、前記吸着ロッド内の気体が抽出された後、前記吸着ロッド内に真空が形成されるので、前記吸盤は前記アンテナを吸着し、前記吸着ロッド内に気体を再び注入した後、前記アンテナは前記吸盤から離脱する。
(もっと読む)
かしめ治具、かしめ方法および基体
【課題】穴部にボール栓を簡単かつ確実に圧入して抜け止め部を形成することができるかしめ治具およびかしめ方法を提供することを課題とする。
【解決手段】金属製の基体10に形成された穴部11に、ボール栓15を圧入して抜け止め部11cを形成するためのかしめ治具50であって、ボール栓15の直径よりも拡径され、ボール栓15および穴部11の開口縁部11aに当接する押圧部52と、押圧部52よりも拡径され、基体10の表面に当接する当接部53と、を有している。また、かしめ方法であって、かしめ治具50の当接部53が基体10の表面に当接する位置まで、押圧部52によってボール栓15を穴部11に押し込んで、ボール栓15を穴部11に圧入するとともに、押圧部52によって開口縁部11aをボール栓15にかしめて抜け止め部11cを形成する。
(もっと読む)
棒状締結材の挿入方法
【課題】超音波振動を用いて、ワークの孔にファスナを進入させていき、騒音及び振動の低減を図る。
【解決手段】超音波振動装置100は、超音波振動を発生する超音波振動部101と、ホーン102とで構成されており、発生した振動をアンビル5を介してファスナ4に伝達する。これによりファスナ4が、スキン1とストリンガ2に形成した孔3を押し広げつつ進入していき、スキン1とストリンガ2とを接続することができる。超音波振動を利用しているため、騒音や振動、及び加工力を低減することができる。
(もっと読む)
自動組立装置および自動組立装置による部品組立方法
【課題】 位相合わせを必要とする部品同士の自動組立において、部品同士の位相が合ったタイミングから挿入が完了するまでの時間の長短に関わらず位相合わせ完了を的確に検知することを課題とする。
【解決手段】 第2の部品を第1の部品に接触させた状態で、第1の部品と第2の部品とを特定の回転軸に対して相対的に回転させつつ、前記回転軸周りのモーメントが予め定められた閾値を超えた場合に回転を終了させる。
(もっと読む)
自動組立装置
【課題】搬送中のワークに部品を組み付けることのできる自動組立装置を提供する。
【解決手段】ワーク12を水平方向に搬送する搬送手段30、31と、搬送手段30、31で搬送されているワーク12の上方へ被挿入部品13を供給する供給手段40、41と、搬送手段30、31で搬送されているワーク12および供給手段40、41で供給された被挿入部品13のうち少なくとも一方を上下方向に移動させる上下駆動手段33とを備え、供給手段40、41は、被挿入部品13をワーク12の搬送方向に取り出すことのできるように開放された開放部413を有し、搬送手段30、31でワーク12を水平方向に搬送しながら上下駆動手段33でワーク12を被挿入部品13に挿入させることで、ワーク12で被挿入部品13を引っ掛けて開放部413から引き出し、開放部413から引き出された被挿入部品13をワーク12に自重落下させる。
(もっと読む)
11 - 20 / 303
[ Back to top ]