
国際特許分類[B23P19/02]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | プレスばめによる対象物結合用,またはプレスばめ取外し用 (303)
国際特許分類[B23P19/02]の下位に属する分類
油圧または空圧による手段を使うもの
振動を使うもの
国際特許分類[B23P19/02]に分類される特許
31 - 40 / 303
斜板式流体機械の組み立て方法および組み立て装置
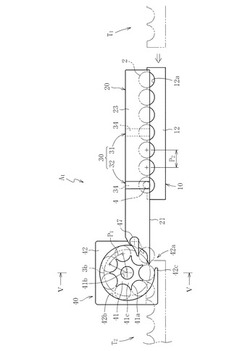
【課題】ピストン端面のセンタ穴の有無を問わず、斜板式流体機械のシャフトアセンブリの自動組み立てを可能にする。
【解決手段】アセンブリ組み立て装置A1で、斜板3bの外周部に、シュー4を介して複数のピストン2を取り付けたシャフトアセンブリSを組み立てる。この組み立て装置A1は、斜板3bを有するシャフト3を縦軸姿勢で支持するシャフト支持部41と、ガイド部材20と、シュー組み込み機構30と、複数のピストン2を縦軸姿勢で搬送する台車10と、斜板3bの外周部に案内された複数のピストン2を、縦軸姿勢で斜板の円周方向等配位置に保持するピストン保持部41とを有する。
(もっと読む)
圧入部品の製造方法

【課題】薄肉円筒部材からなり、被圧入部品に圧入される圧入部品の製造方法であって、圧入後の圧入部品に関する内周面の真円度を、該内周面の全ての領域に渡って効率的、且つ経済的に保証することが可能な圧入部品の製造方法を提供することを課題とする。
【解決手段】断面視円形状の孔部からなる内周部を有する被圧入部品2に圧入される、圧入部品1の製造方法であって、圧入部品1は、薄肉円筒部材から形成され、被圧入部品2の内周部における真円度の公差を規定する規格値T2と、圧入部品1の肉厚寸法差(ΔD)の公差を規定する規格値T3と、を予め設定し、規格値T2に基づいて、被圧入部品2の内周部の内周面2aを加工するとともに、規格値T3に基づいて、圧入部品1の内周面1aおよび外周面1bを加工した後、圧入部品1を、被圧入部品2の内周部の形状に即して変形させつつ、被圧入部品2の内周部に圧入する。
(もっと読む)
圧入装置
【課題】バリやカジリ等の発生を避けて、スムーズかつ高精度に圧入を実施することのできる圧入装置を提供する。
【解決手段】ベアリングアセンブリ5をクランクシャフト2の圧入部位に向けて押込む押込み機構10と、押込み機構10に押込み力を付与する駆動機構11とを具備する。押込み機構10は、ベアリングアセンブリ5と当接可能な第1の押込み治具12と、第1の押込み治具12と当接して、駆動機構11から受けた押込み力を第1の押込み治具12に伝達する第2の押込み治具13とを有する。第1の押込み治具12は、第2の押込み治具13に対して傾いた状態でベアリングアセンブリ5と当接可能に構成されると共に、第1の押込み治具12と第2の押込み治具13には、互いに当接可能な部分球面19,20がそれぞれ設けられている。また、第2の押込み治具13は、駆動機構11に対して押込み力と交差する向きにスライドできる。
(もっと読む)
ローラ寄せ板バネ装着装置およびローラ寄せ板バネ装着方法
【課題】 ローラ寄せ板バネに不具合となる変形を生じさせることなくクラッチ本体へ装着することを可能とする。
【解決手段】 ローラ寄せ板バネ装着装置10は、クラッチ40のクラッチ本体41へ装着するローラ43およびローラ寄せ板バネ45をプリセットするためのプリセット用穴12を有するプリセット用ホルダ11と、前記プリセット用穴12にプリセットされたローラ43およびローラ寄せ板バネ45を同時にクラッチ本体41の凹部42へ押し出すプッシャ30と、を備えたことを特徴とする。
(もっと読む)
圧入装置
【課題】パンチテーブルのスライド方向に直交する方向の幅寸法を縮小することができる圧入装置を提供すること。
【解決手段】圧入装置1は、圧入ワーク8を支持する回転テーブル4と、圧入部品82を押し出すパンチ2と、パンチ2を配設して、回転テーブル4の回転平面方向に対して平行な方向へスライドさせるパンチテーブル25と、を備えている。圧入装置1は、圧入ワーク8に形成された圧入穴81の回転位置を、回転テーブル4を回転させて変更する一方、圧入部品82のスライド位置を、パンチテーブル25をスライドさせて変更して、回転位置とスライド位置とを一致させ、パンチ2によって圧入部品82を圧入穴81へ圧入するよう構成してある。
(もっと読む)
圧入装置
【課題】圧入時に工作機械に大きな負荷がかかることを確実に防止できる圧入装置を提供する。
【解決手段】主軸11の回動に伴って一体的に回動するシャンク30と、シャンク30を回動可能に支持する支持部材40と、シャンク30の回動に伴って一体的に回動する推進部材50と、推進部材50が回動した際に、推進部材50をシャンク30に対して前後方向に相対的に移動可能に支持するとともに、皿ばね75・75を介して支持部材40に支持されるアーム70と、推進部材50の移動に伴って一体的に移動するとともに、圧入部品W1を支持する圧入ヘッド60と、を具備する圧入工具20を主軸11に装着し、アーム70が後方向に移動不能となるようにアーム70の係合部70dを治具100の切欠部100aに係合させた状態で、圧入装置1を後方向に移動させて、支持部材40をアーム70から離間させた状態で、圧入部品W1をワークWに対して圧入する。
(もっと読む)
圧入装置
【課題】圧入穴と圧入部品とにかじりが生じないようにして、圧入穴に対して圧入部品を垂直に圧入することができる圧入装置を提供すること。
【解決手段】圧入装置1は、圧入部品82を押し出すパンチ2と、圧入ワーク8を支持する回転テーブル4と、パンチ2の直下位置においてパンチ2による加圧力を受けるバックアップ5と、を備えている。圧入装置1は、圧入ワーク8とバックアップ5との間に隙間を形成しておき、圧入部品82を圧入ワーク8に形成した圧入穴81に圧入する際には、パンチ2によって圧入部品82を介して圧入ワーク8及び回転テーブル4をバックアップ5に対して下降させ、圧入ワーク8における圧入穴81の形成位置の下方をバックアップ5に接触させるときに、回転テーブル4に対する圧入ワーク8の支持状態が変化して、圧入部品82の圧入方向に対して圧入穴81の軸方向を一致させることができるよう構成してある。
(もっと読む)
Oリング挿入治具
【課題】Oリングを拡張し均等に押し出すことで捻れなく取付対象箇所に取り付けることができ、且つ、Oリング拡張時の治具との擦れが小さく、取り付け後の捻れ確認・修正を必要としないOリング挿入治具を提供する。
【解決手段】貫通穴20が形成された金属板2と、貫通穴20を貫通すると共にOリング4の内側に挿入され、放射状に移動可能な複数の拡張爪3とを有し、複数の拡張爪3を放射状に移動させることでOリング4を拡張し、複数の拡張爪3を貫通方向に移動させて拡張したOリング4を金属板2に引っ掛けてOリング4を取付対象物5に取り付ける。
(もっと読む)
自動組立システムおよび自動組立方法
【課題】要求される組立精度より繰り返し位置精度が大きい場合であっても、自動で部品組付けを行う。
【解決手段】第2部品画像に基づいて、組付け部位の位置を認識する第2部品認識手段と、組付け部位の位置に第1部品51を移動させる部品移動手段と、部品移動手段により移動された第1部品51を第2部品52に組付ける組付実施手段と、組付けが成功したかを判断する組付判断手段と、組付けが失敗した場合に、突き当て画像に基づいて、第1部品51の位置を認識する第1部品認識手段と、組付け部位の位置および第1部品51の位置に基づいて、第1部品51に対する位置補正量を算出する補正量算出手段と、位置補正量に基づいて、第1部品51を移動させる部品位置補正手段とを備え、組付実施手段は、部品位置補正手段により移動された第1部品51を第2部品52に組付ける。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
31 - 40 / 303
[ Back to top ]