
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,121 - 1,130 / 6,854
支援装置、それにおける安全走行の支援をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
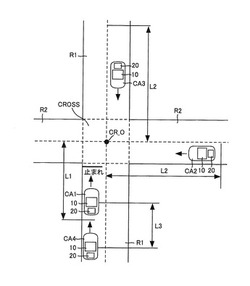
【課題】車両が起こし得る事故の種類に応じて危険車両を特定することができる支援装置を提供する。
【解決手段】車両CA1に搭載された支援装置10は、地図情報と、車両CA1の位置と、車両CA1の進行方向と、車両CA1のウィンカー信号とに基づいて、車両CA1の進行方向における直近の交差点CROSSにおける車両CA1の進行方向を判定して車両CA1が起こし得る事故の種類を判定する。そして、車両CA1に搭載された支援装置10は、車両CA2〜CA4の位置、速度および進行方向と、車両CA1の位置とに基づいて、車両CA1が起こし得る事故の種類に応じて、車両CA2〜CA4をそれぞれ出会い頭事故、右折事故および左折事故における危険車両として特定するとともに、その特定した危険車両を車両CA1の運転者に警告する。
(もっと読む)
自動車の駐車支援システムにおける障害物表示方法及び装置
本発明は、自動車の駐車支援システムにおける障害物の表示方法に関するものであり、
a)周辺画像を求めてその中に存在する複数の障害物を識別するステップと、
b)識別した障害物の少なくとも1つの間隔距離値及び/又は角度位置を求めるステップと、
c)求められた間隔距離値及び/又は角度位置に依存して周辺画像の領域に対してエッジ強調手法を適用するステップと、
d)求められた周辺画像と共にエッジ強調部分を駐車支援システムの表示手段に表示するステップとを含んでいる。  (もっと読む)
(もっと読む)
電動車両および車両接近報知装置

【課題】電動車両の進行方向の領域の歩行者等に対してのみ車両接近報知音を出力して周囲の環境に影響を与えないようにする。また、電動車両の接近を高齢者等に確実に報知できるようにする。
【解決手段】電動車両1に、超音波を使用した超指向性の超音波パラメトリックスピーカを搭載し、車両接近報知音により変調した超音波を、車両前部に取り付けた一対の超音波放射器7a,7bから車両1の進行方向の限られた特定領域に放射するようにし、車両1の周囲に対して騒音とならないようにしている。また、車両接近報知装置は、電動車両1からの超音波を受信して振動等の報知手段によって、高齢者等に、電動車両1の接近を報知するようにしている。
(もっと読む)
車両検出装置、車両検出プログラム、および車両検出方法
【課題】 自車の周囲に存在する前方車あるいは対向車を検出することができる車載型の車両検出技術を提供する。
【解決手段】
撮像装置で撮像した画像において位置取得センサから取得した車両候補点に対応した画像処理領域を決定し、該画像処理領域に対し車両形状モデルを用いて識別処理を行い、対応する自車周辺の車両の正面/背面を検出し、検出車両の周囲画像を評価し車両向きを算出して車両位置を出力し、検出した車両の自車に対する傾きを算出し、車両位置と検出車両の傾きから自車と前記検出車両の俯瞰図上の位置を算出し、自車と検出車両の軌道を推定して車両の衝突可能性を判定することを特徴とする。
(もっと読む)
運転支援装置
【課題】輪留めとタイヤとの位置関係などを運転者に表示する運転支援装置を低コストにて提供可能とする。
【解決手段】CCDカメラによって撮影された画像と、車両のタイヤ位置や車体位置などの基準位置を示す画像とを組み合わせた合成画像を生成し、その合成画像上に、目印マーカーを表示する。目印マーカーは、車両が移動したとき、車両の移動方向とは逆方向に、車両の移動距離分だけ合成画像上を移動するように表示される。このため、車両の周囲に輪留めや障害物があった場合に、それらが車体の陰に隠れるなどして、CCDカメラの撮影範囲外となっても、輪留めや障害物に対応する位置に表示された目印マーカーを用いることにより、合成画像上において、その目印マーカーと車両との基準位置との接近度合を確認することができる。
(もっと読む)
情報提示装置及び情報提示システム並びにプログラム
【課題】障害物等が存在する方向や移動方向などの方向に関する情報を、運転者等に正確に提示することができる触覚刺激による情報提示装置等を提供すること。
【解決手段】ステップ110にて、周辺監視装置3からの信号に基づいて、危険物の状態を分析し、どの振動モータ23をどのように駆動させるかを決定する。例えば車両の前方の右側に危険物が存在する場合に、シート20の左側から右側に向かって振動が移動するように制御するときには、振動モータ23の振動を順次右側に移動させるとともに、始点側のみ振動させる振動モータ23の列を2列とし、その後は1列のみ振動させるように、駆動信号を設定する。これにより、(始点のある)左側から(終点のある)右側に向かって、始点側を強調した振動が移動するように各振動モータ23の動作が繰り返されるので、運転席に着座した運転者は、振動が左側から右側に移動することを体感できる。
(もっと読む)
駐車支援装置及び方法
【課題】複数の駐車枠位置や複数の駐車経路が存在するような場合でも、運転者の操作負担を最小化できる駐車支援装置を提供する。
【解決手段】駐車枠位置取得部21は、車載のカメラ3〜6の画像から一つもしくは複数の駐車枠位置を取得する。車両状態検出部22は、車輪速度センサ7〜10の検出信号から自車両の位置及び姿勢を検出する。駐車経路生成部23は、車両状態検出部22が検出した自車両の位置及び姿勢と、駐車枠位置取得部21が取得した駐車枠位置に基づいて、それぞれの駐車枠位置への駐車経路を生成する。評価部24は、それぞれの駐車経路に対する運転者の操作負担を評価し、この評価結果に基づいて、駐車経路選択部25は、運転者の操作負担が最小な駐車経路を選択し、車載モニタ13へ表示する。
(もっと読む)
車両用接触回避支援装置
【課題】走行路の路面摩擦特性を精度良く判定することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14の路面摩擦特性判定手段20は、路面摩擦係数μが推定される毎に、路面摩擦係数μに対応する路面摩擦特性のカウント値CNT_sl、CNT_l、CNT_hを積算し、当該積算の結果に応じて前記路面摩擦特性を判定する。
(もっと読む)
車両運転支援装置及び支援方法
【課題】移動体の挙動予測を効率的に行って接触の可能性を迅速に判断し、適切なタイミングで警告情報を提示できるようにする。
【解決手段】車両に搭載されたカーナビゲーションシステム10のナビゲーションECU11が、第1光ビーコン4から受信した運転支援情報に含まれる交差点構造情報に基づいて、サービス対象交差点における移動体検知エリアを複数のエリアに分割し、CAN経由で取得される車速情報に基づいて、分割した複数のエリアの優先順位を決定する。そして、優先順位の高いエリアから順に当該エリアに存在する歩行者や自転車の挙動を運転支援情報に含まれる移動体状態情報に基づいて予測し、その予測結果とCAN経由で取得される車両情報とに基づいて注意喚起の必要性を判断して、注意喚起の必要性ありと判断した場合に、ディスプレイ14での画面表示やスピーカ15からの音声出力により警告情報を提示する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から順次複数の所定の経路パターンで仮想的に移動させて先端に設定された仮想移動点に置く仮想移動処理手段と、各仮想移動点を新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段とを有する。車両が、移動可能条件が成立するまで仮想的に移動させられるので、車両を現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができる。
(もっと読む)
1,121 - 1,130 / 6,854
[ Back to top ]