
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,141 - 1,150 / 6,854
運転支援装置

【課題】本発明は、路側装置から受信した支援対象地点までの支援情報を利用して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】支援情報に基づいて支援対象地点における運転支援を行う運転支援装置1であって、支援情報(現在位置情報、支援対象地点までの道路線形情報、支援対象地点の位置情報)を取得する支援情報取得手段10,21と、自車の現在位置を検出する現在位置検出手段11と、支援対象地点を含む地図情報を記憶する記憶手段11aと、現在位置情報と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第1の支援対象候補地点と、検出された現在位置と支援対象地点までの道路線形情報及び地図情報に基づいて特定される第2の支援対象候補地点と、支援対象地点の位置情報とを比較する比較手段22と、その比較結果に基づいて運転支援を行う運転支援手段23,24とを備えることを特徴とする。
(もっと読む)
運転誘導装置

【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 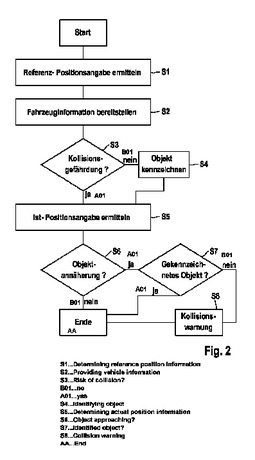 (もっと読む)
(もっと読む)
車両存在報知装置
【課題】危険を知らせる必要のある歩行者等のみに車両2の存在を知らせる報知音を伝えることにより、危険位置にいない歩行者等や車室内にいる人に対して報知音による不快感を与えないようにする車両存在報知装置1を提供することにある。
【解決手段】車両存在報知装置1では、超音波を搬送波とし、可聴音に応じて超音波を変調し、変調された超音波を空中に放射することで報知音を発生させる。変調された超音波が空中を進む内に自己復調されて可聴音となるが、この自己復調された可聴音は超音波と同様に指向性がよく、危険を知らせる必要のある範囲にいる歩行者のみに報知音を伝えることができる。また、超音波スピーカ6がドアミラー9に内蔵されている。ドアミラー9は車両側面から側方に突出しているので、複雑な構造をとらなくても、簡易な構造で車両前後方に向かって音波を放射することができる。
(もっと読む)
駐車空間認識装置
【課題】水平広角度ソナーを用いても駐車空間の認識精度を高めることができる駐車空間認識装置を提供する。
【解決手段】駐車空間認識装置は、駐車領域検出ラインLに駐車車両検出部Laが複数ある場合には、座標平面上に、各駐車車両の仮想中心点Eを設定し、さらに仮想駐車位置11aを設定する。次に、駐車空間認識装置は、仮想駐車位置11a、11a間のX軸に平行な最短距離を算出して、この最短距離が一般的な駐車幅以上である場合には、仮想駐車位置11a、11a間に駐車空間Sがあると判断して、この駐車空間Sの存在をモニタに表示する。
(もっと読む)
車両周辺認知支援装置
【課題】
ホーンを普段ほとんど使用しない車両100の運転者がいざというときに即座に危険回避行動(ホーンを鳴らす)が取れる車両周辺認知支援装置を提供すること。
【解決手段】
車両100の周辺に存在する物体の物体情報をフロントカメラ11が検出すると、電子制御ユニット1は当該物体情報に基づいて、ステアリングホイール21に備えられたホーンパッド61に設置された発光部71を発光させるため、車両100の運転者はホーンパッド61の位置を容易に認識することができる。
(もっと読む)
車群制御装置及び車群制御システム
【課題】車群の配列を適切に制御することができる車群制御装置及び車群制御システムを提供する。
【解決手段】路側装置2は、路側無線装置22a,22bと、制御装置24とを備えている。路側無線装置22a,22bは、複数の車両の目的地を示す目的地情報及び車両に関する車両情報を、料金所を通過する車両Mから受信する。制御装置24は、路側無線装置22a,22bによって受信した目的地情報及び車両情報に基づいて、任意の車両の後に料金所を通過する後続車両の速度を制限するための速度制限情報を算出する。そして、路側無線装置22a,22bは、制御装置24によって算出された速度制限情報を後続車両に送信する。
(もっと読む)
車両周辺画像表示装置および車両周辺画像表示方法
【課題】トップビュー画像と共に表示される車両側方画像がどの方向で撮影された画像なのかを直感的に分かりやすくできる「車両周辺画像表示装置および車両周辺画像表示方法」を提供する。
【解決手段】前方サイドビュー画像41や後方ミラービュー画像42などの車両側方画像をトップビュー画像40と共に表示させるときに、車両側方画像とトップビュー画像内における当該車両側方画像の撮影方向との対応関係を示す識別画像(40a,41a),(40b,42b)を、車両側方画像およびトップビュー画像の双方に重畳して表示させることにより、識別画像が表示された車両側方画像およびトップビュー画像の双方を見ることで、トップビュー画像と共に表示される車両側方画像がどの方向で撮影された画像なのかを直感的に把握できるようにする。
(もっと読む)
駐車空間検出装置
【課題】水平広角度ソナーを用いても駐車空間の検出精度を高めることができる駐車空間検出装置を提供する。
【解決手段】駐車空間検出装置は、12番の反射波形4wに対応する角検出位置S1を駐車空間Sの走行側の左角の検出位置に設定し、37番の反射波形4wに対応する角検出位置S2を駐車空間Sの走行側の右角の検出位置に設定する。そして、駐車空間検出装置は、双方の角検出位置S1、S2に基づいて駐車空間Sの位置を想定する。
(もっと読む)
1,141 - 1,150 / 6,854
[ Back to top ]