
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
141 - 150 / 6,854
通信装置
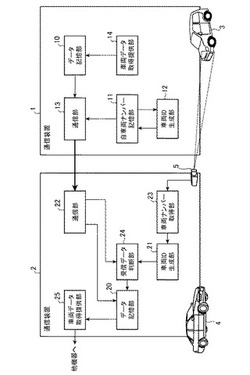
【課題】車車間通信における通信相手の検証の信頼性を向上できる通信装置を提供する。
【解決手段】他車両の車両ナンバーを取得する車両ナンバー取得部23と、車両ナンバーから車両IDを生成する車両ID生成部12,21と、車両ID生成部12,21が自車両の車両ナンバーから生成した車両IDを通信データに加えて送信する通信部13,22と、通信部13,22が受信した通信データにおける通信相手の車両IDと、車両ナンバー取得部23が取得した車両ナンバーから車両ID生成部12,21が生成した車両IDとを比較した結果に応じて、通信データの真偽を判断する受信データ判断部24とを備える。
(もっと読む)
物体検出装置

【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
車両用表示装置
【課題】乗員に現状の先行車両と自車両との車間距離を容易に把握させることで、乗員に与える安心感を向上させる。
【解決手段】本発明に係る車両用表示装置10は、自車両100の走行情報を表示する自車両モデル11と、上記自車両100の進行方向で走行する先行車両の走行情報を表示する先行車両モデル12と、上記自車両100及び先行車両の車間距離を表示する車道モデル13と、を備えて構成されている。
(もっと読む)
安全運転支援装置
【課題】リアルタイム性を大きく損なうことなく、受信した情報の各々に基づくユーザへの有意な注意喚起を、音声メッセージによって行う「安全運転支援装置」を提供する。
【解決手段】出力する音声メッセージを、全て、対象物の位置/方向を表す位置提示メッセージ要素と、対象の種別を表す種別提示メッセージ要素と、対象物の状態を表す状態表示メッセージ要素とを、当該順序で読み上げた音声メッセージとする。そして、出力しようとする音声メッセージと同じ位置提示メッセージ要素が過去所定期間内に出力した音声メッセージに所定数以上連続して含まれているときには、出力しようとする音声メッセージの位置提示メッセージ要素のみを出力する。
(もっと読む)
車間距離算出装置およびそれを用いた車両制御システム
【課題】車載単眼カメラで検出した先行車両までの距離を、精度よく計測する。
【解決手段】自車に搭載された1つの撮像部から得られた画像から、他の車両の画像領域を検出する車両検出部と、前記他の車両の車両型式を識別する車両型式識別部と、車両固有の車体寸法に関する情報を格納したデータベースと、前記他の車両の画像における前記車体寸法相当の画素数を計測する車体寸法画素数算出部と、前記車両型式識別部で識別された車両型式に関して前記データベースを照合して、前記他の車両の前記固有の車体寸法を算出する車体寸法算出部と、前記他の車両の固有の車体寸法と前記車体寸法相当の画素数とに基づき、自車から前記他の車両までの距離を算出する車間距離算出部とを有する。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
車両周辺監視装置
【課題】単眼カメラによる距離検出と単眼カメラ以外の構成による距離検出とを切替えて、車両周囲の対象物の位置を追跡するときに、対象物の距離検出の信頼性が低下することを防止した車両周辺監視装置を提供する。
【解決手段】単眼距離検出部11による検出距離が切替距離以下になった後は、ステレオ距離検出部12により車両1と対象物間の距離を検出して対象物の位置を追跡し、走行状況検知部15により検知されている車両1の走行状況が、単眼距離検出部11による距離検出精度を低下させるおそれがある精度低下懸念状況であるときは、切替距離hを、精度低下懸念状況でないときよりも長く設定する対象物位置追跡部13を備える。
(もっと読む)
カメラシステム、衝突予測システム、駐車ガイドシステム
【課題】距離精度を向上できる。
【解決手段】正対する光の進行方向を一方光へ変える少なくとも二つの光学素子と、前記光学素子により進行方向を変えられた光を電気信号に変換する撮像素子と、を有する光学部と、少なくとも二つの前記光学部の撮像素子が変換した電気信号に基づいて距離情報を算出する距離算出部と、を備える。
(もっと読む)
水没対応車両装置
【課題】検出精度の低下を抑えながら車両の水没を迅速に検出することを可能にする。
【解決手段】互いに離れて配設されるとともに一方が接地されている一対の露出電極10・11により構成されているとともに、露出電極10・11が筐体20外部に露出されている水没センサ9と、所定の静電容量を有し、水没センサ9の非接地側の露出電極10と直列に接続されるとともに、非接地側の露出電極10と接続されていない端子側で直流電圧の印加を受けることが可能となっているコンデンサ12とを備える。そして、コンデンサ12の静電容量と露出電極10・11間の静電容量との比に応じたコンデンサ12と水没センサ9との間の電位が、露出電極10・11間の静電容量の増加により変化することをもとにして水没を検出する。
(もっと読む)
車両の運転支援装置
【課題】自車両の車線変更や右左折が行なわれる状況で、自車両とその周辺に存在する障害物との接触の可能性を適切に判断することができる運転支援装置を提供する。
【解決手段】車両の車線変更及び右左折のいずれかが行なわれる特定状況が発生した場合に、特定状況種別判定手段14により特定状況の種別を判定し、判定した種別に応じて進行経路予測手段15により予測した車両2の進行経路を用いて、自車両2と障害物との接触の可能性を判断する処理を接触可能性判断手段16により実行する。
(もっと読む)
141 - 150 / 6,854
[ Back to top ]