
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
151 - 160 / 6,854
車両周辺監視装置
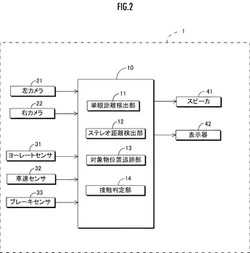
【課題】ステレオカメラにより距離を検出するための演算量を低減して、対象物の距離を精度良く検出することができる車両周辺監視装置を提供する。
【解決手段】車両1に搭載された左カメラ21,右カメラ22により撮像された同一対象物の画像部分の視差に基づいて、車両1と対象物との距離を検出するステレオ距離検出部12と、左カメラ21又は右カメラ22の撮像画像における対象物の画像部分の位置が、車両1からの距離が所定距離以下である範囲を想定して設定された特定画像領域内であるときに限定して、ステレオ距離検出部12により車両1と対象物間の距離を検出して、対象物の位置を追跡する対象物位置追跡部13とを備える。
(もっと読む)
産業車両の安全装置

【課題】フォークリフトに搭載された警報コントローラからトリガー波を送信し、作業員の持つRFIDタグで受信して警報を安定して発する。
【解決手段】フォークリフトのRFIDリーダから発するトリガー波αを長波帯域の電磁波とし、ヘッドガード16の上部に水平姿勢で取り付けられた送信アンテナ22は、周長が3.0以上で10.0m以下のループ状で、複数回に巻回されアンテナ線の全長が、送信波の波長の0.005〜0.015倍の範囲となる多重巻きのループ体22aとし、このループ体22aが樹脂製カバー体51内に収容された磁界ループアンテナとした。
(もっと読む)
駐車支援装置
【課題】自車両の進行方向に並んだ駐車車両の駐車形態に応じた適切な駐車スペースを早期に特定することで、駐車開始位置といった段階から有益な駐車支援を行う。
【解決手段】また、空間寸法算出部14は、並列する三台の駐車車両の間の車間距離のそれぞれを合算した車間合計値を算出する。駐車形態判断部18は、車間合計値と、駐車車両の駐車形態を判断するために設定された判定値とを比較することにより、駐車車両の駐車形態が縦列駐車であるのか、それとも並列駐車であるのかを判断する。そして、駐車支援部19は、駐車形態判断部18により判断された駐車形態に応じて、自車両Caが駐車可能な駐車スペースEを特定する。
(もっと読む)
物体の状態についての乗り物の操作者の期待を決定するための方法、システム、およびコンピュータ・プログラム・プロダクトを具体化するコンピュータ可読媒体
【課題】警告が必要とされる状況においてのみ警告が発せられるように、たとえば乗り物内の異なる警告システムに対して入力データを提供する。
【解決手段】第1の時点における物体の状態についての操作者の期待を示す入力信号を獲得するステップ402と、第2の時点における物体の状態を、前記物体の状態を示す入力信号に基づいて決定するステップ404であって、前記第2の時点は前記第1の時点より後であるとするステップと、前記第2の時点における前記操作者の見積もりによる視覚的入力を示す入力信号を獲得するステップ406と、前記第2の時点における前記物体の前記状態に基づいて前記第2の時点における前記物体の前記状態についての前記操作者の期待を決定するステップ408と、前記第2の時点における前記物体の前記状態についての前記操作者の期待を示す出力信号を提供するステップ410と、を包含する。
(もっと読む)
運転支援装置
【課題】自車両が車線変更しようとするとき、車線変更先の同一の走行レーンに車線変更する他車両との衝突する可能性に対し警報を発するなどの車線変更の際の支援を確実に行う運転支援装置を提供する。
【解決手段】自車両101が走行している第1走行レーン111に隣接する第2走行レーン112を挟み第1走行レーン111と反対側に位置する第3走行レーン113の自車両斜め後方の死角エリアDEを走行する他車両102が検知された場合、他車両102と自車両101との車間距離Lと、他車両102と自車両101との横方向相対速度とをもとに、他車両102と自車両101とが共に、第2走行レーン112へ車線変更したと仮定したときに想定される、自車両101と他車両102との衝突までの時間TTCを算出し、算出された時間TTCと予め設定された規定値をもとに警報を発するようにした。
(もっと読む)
移動体検出装置及び移動体検出方法
【課題】移動体の検出精度を向上させることが可能な移動体検出装置及び移動体検出方法を提供する。
【解決手段】移動体検出装置1は、カメラ10による撮像にて得られた異なる時刻の画像データを、鳥瞰視上で位置を合わせる位置合わせ部32と、位置合わせ部32により位置合わせされた異なる時刻の画像データの差分画像データに基づいて、自車両周囲の移動体を検出する移動体検出部33とを備えている。また、移動体検出部33は、検出領域の画像を鳥瞰視に視点変換した際に立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成する差分波形生成部33aと、差分波形生成部33aにより生成された差分波形の大きさが所定以上である場合、移動体検出部33による移動体検出を禁止する禁止部33bとを有する。
(もっと読む)
車両用加速抑制装置及び車両用加速抑制方法
【課題】自車両が駐車する際の運転性の低下を抑えつつ加速操作の誤操作時の加速抑制をより確実に実施可能とする。
【解決手段】自車両MMが駐車枠に進入すると判定すると、加速操作子の操作量に応じた加速指令値を抑制する。更に、上記加速指令値を抑制しているときに予め設定した設定加速操作量以上の加速操作を検出すると、加速指令値の抑制量を増大する。
(もっと読む)
車両用通信システムおよびこれに用いる情報提供装置
【課題】通信が不安定なときでも情報提供装置側から車両へ情報提供できるようにする。
【解決手段】車両側から得られた走行環境を解析した解析情報から、運転者に提供する送信情報が決定される。通信が不安定なときは、解析情報と共に運転者へ情報提示する提示条件が合わせて提供される。別の手法として、通信が安定しているときは解析用プログラムを車両側へ提供する一方、通信が不安定なときは、可能な範囲でもって、走行環境を解析した解析情報から運転者に提供する送信情報が決定される。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
車両操作支援装置
【課題】障害物の移動状態に応じた車両の操作支援を実行可能な車両操作支援装置を提供すること。
【解決手段】自車に対する障害物を検知し、その検知結果を用いて少なくとも障害物と自車との相対速度及び相対距離を検出する障害物検知手段M1を備え、検出の結果に基づいて障害物に対する回避支援を行う車両操作支援装置Uにおいて、自車速度と相対速度と相対距離とに基づいて、障害物が回避支援の対象となるか否かを判定する回避支援対象判定手段M2を備え、相対速度が自車速度と略等しい場合に、障害物を、少なくとも車両進行方向に移動していない停止障害物であると判定し、相対速度が自車速度と異なる場合にて、相対速度と相対距離とに基づいて算出した衝突余裕時間の単位時間当たりの減少量が所定の減少量以上の場合は、障害物を急接近障害物と判定し、所定の減少量未満の場合は、障害物をその他の障害物と判定する。
(もっと読む)
151 - 160 / 6,854
[ Back to top ]