
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
1,091 - 1,100 / 6,854
物体認識装置
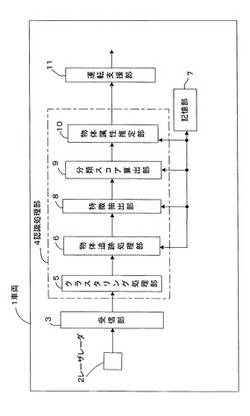
【課題】車載レーダの反射の検出パターンから車両、自転車、人(歩行者)等を区別して精度よく認識する新規な物体認識装置を提供する。
【解決手段】特徴抽出部8、分類スコア算出部9により、フレーム毎のレーザレーダ2の反射の検出パターンを、物体毎に用意した複数の特徴パターンのいずれかに分類し、さらに、物体属性推定部10により、段の時系列の複数フレームのパターン認識の分類結果を累積することで、物体の移動の方向や姿勢等の時間変化を吸収し、それらの影響を排除して物体を正確に認識する。
(もっと読む)
前面衝突時オーバーラップ量制御装置

【課題】前面衝突時オーバーラップ量制御装置に関し、運転者の操舵操作等による衝突回避の可能性を確保しながら、衝突した場合の運転者の衝突被害を軽減することができるようにする。
【解決手段】自車両2の前方に衝突可能性のある障害物3が検知された場合に自車両2を横移動させ、障害物3との前面衝突時のオーバーラップ量を制御する装置において、自車両前部に運転者以外に乗員がおらず、また、運転者による衝突回避とみなせる操舵操作がなく、また、自車運転席前部Aを含むオーバーラップ部分OLでの障害物3との衝突が予測され、さらに、自車両2を横移動させた際オーバーラップ部分OLのオーバーラップ量がゼロになる回避スペースがあると判断された場合に、上記オーバーラップ量をゼロにする方向に自車両2を横移動させる。
(もっと読む)
車輌灯制御装置
【課題】車輌に設けられた既存の車輌灯を用いて警告を行うことにより、コストの増大を抑制して、車輌の内外への警告を行うことができる車輌灯制御装置を提供する。
【解決手段】車輌灯制御装置1は、障害物センサ23により車輌周辺の障害物までの距離を検知し、障害物までの距離が近いほど車輌の前照灯、尾灯、後退灯、方向指示灯及び車内灯等のランプ2の照度を増加させ、障害物までの距離が遠いほどランプ2の照度を低減させる。車輌灯制御装置1は、速度センサ21が検出する車輌の走行速度を取得し、走行速度が速いほど障害物までの距離が遠くてもランプ2の照度を高める。車輌灯制御装置1は、車輌周辺の障害物を検知した際にランプ2が消灯状態の場合には、ランプ2を点灯させた後、ランプ2の照度調整を行う。また車輌灯制御装置1は、電源からランプ2への電力供給をPWM制御し、デューティ比を調整することでランプ2の照度調整を行う。
(もっと読む)
車両制御装置
【課題】簡単な方法で高精度な二次元路面μ分布を生成することが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、右側車輪位置および左側車輪位置の路面μ=(前後Gx2+横Gy2)1/2とし、算出した路面μのうち、車両とタイヤの非線形度合いの信頼度および/または車輪スリップの信頼度が所定値以上のものを抽出し、抽出した路面μに基づいて、道路の前後方向および横方向について補間して二次元路面μ分布を生成する。
(もっと読む)
後方画像表示切替装置及び方法
【課題】輪止めの有無等にかかわらず駐車動作中の適切なタイミングで通常画像から俯瞰画像へ自動的に切り替える。
【解決手段】カメラ10で撮像した後方画像を通常画像又は俯瞰画像に編集する画像編集部12と、前記通常画像又は俯瞰画像をドライバーに表示する表示部14と、前記通常画像に基づいて前記自車の後方の駐車枠を検出する駐車枠検出部16と、前記自車が当該駐車枠に対して予め定められた範囲の平行の状態で後退進行しているか否かを判定する平行判定部18と、前記平行での前記駐車枠への進入開始を判定すると共に当該進入開始位置からの進入距離を算出する進入距離算出部20と、前記進入距離が予め定められた切替距離に至った際に前記通常画像を前記俯瞰画像に切り替える切替制御部22とを備えた。
(もっと読む)
駐車スペース案内システム
【課題】駐車場側に特別な設備を要することなく、車両側における簡単な構成で、立体的な駐車場を含めて精度良く駐車場の空きスペースを案内する技術を提供する。
【解決手段】自車両に近接する他車両の固有のID情報を含む車両情報を取得する車両情報取得部11と、自車両の周辺物体と自車両との距離情報を含む周辺物体の物体情報を取得する物体情報取得部12と、車車間通信を行って駐車場マップを取得する駐車場マップ取得部13と、車両情報と物体情報とを用いて駐車場マップに自車両をマッピングするマッピング部14と、駐車場マップを用いて空きスペースを案内する案内部15と、自車両と周辺物体との相対的な近距離マップを生成する近距離マップ生成部16と、近距離マップを用いて駐車場マップを更新する駐車場マップ更新部18と、更新された駐車場マップを車車間通信により送信する駐車場マップ送信部19とを備える。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
車両用注意喚起装置
【課題】通信により取得した移動物体に関する情報を利用して、より効果的にドライバーに移動物体に対する注意を喚起することが可能な車両用注意喚起装置を提供する。
【解決手段】HMI制御部25は、光ビーコン通信機11、路車間通信機12又は車車間通信機13により得られた情報が、移動物体と自車両100との接触の可能性を示すときは、注意喚起表示53をディスプレイ31に表示させる。HMI制御部25は、注意喚起表示53が表示されているときに、通信で得られた情報から移動物体との接触の可能性が無くなったことが判定されるときは、少なくとも所定時間は、注意喚起表示53より注意喚起の度合の低い注意喚起履歴表示54を表示させる。これにより通信で得られた情報から接触の可能性が無くなったことが判定されても、ドライバーの安全意識の低下を抑制でき、より効果的にドライバーに注意を喚起できる。
(もっと読む)
運転支援装置
【課題】ユーザがステアリングを正位置に戻す操作をより容易にすることを可能にする運転支援装置をより容易に提供する。
【解決手段】ステアリング角度に応じた走行予想軌跡Bを車両後方画像Aに重畳して表示器で表示させるとともに、ステアリング角度に応じて曲率が変化する1本の舵角線Cを、当該走行予想軌跡の幅方向中心に表示させる。
(もっと読む)
自動制動装置
【課題】自動制動装置に関し、簡素な構成で、先行車両の急制動時に適切に自動制動制御を実施する。
【解決手段】先行車両の灯火装置の画像を撮影する撮像手段5と、撮像手段5で撮影された該画像に基づき、該先行車両における緊急制動操作の有無を判定する緊急制動判定手段3と、緊急制動判定手段3において該緊急制動操作であると判定された場合に、自車両の自動制動を実施する自動制動手段4とを備える。
該緊急制動判定手段3において、該灯火装置の点滅周期を検出する点滅周期検出手段1aと、点滅周期検出手段1aで検出された該点滅周期に基づき、該灯火装置におけるフラッシングの有無を判定するフラッシング判定手段1bとをさらに設ける。
(もっと読む)
1,091 - 1,100 / 6,854
[ Back to top ]