
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
891 - 900 / 6,854
車両の周辺監視装置
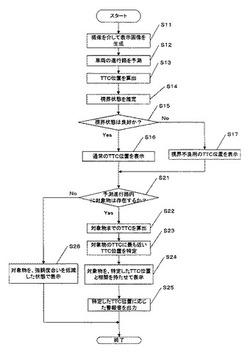
【課題】危険性の度合いについて運転者の速やかな認識を可能にしつつ、視界の状態にかかわらず、表示装置上の映像に依存せずに直接的な前方の目視を運転者に促すような表示を行う手法を提供する。
【解決手段】撮像装置によって取得された画像に基づいて、車両の周辺の所定の対象物を検出し、該撮像画像に基づいて生成される表示画像を、車両の乗員が視認可能なように表示装置上に表示するとともに、対象物が該車両に対して所定の位置関係にある場合に、該表示画像上の該対象物を強調的に表示する。さらに、車両の周辺の視界状態を推定する。視界状態が良好と推定された場合には、表示画像上で、車両から所定距離の位置に第1の強調表示を表示し、視界状態が良好ではないと推定された場合、視界状態が良好と推定された場合に比べ、該第1の強調表示を、車両側に近づけて表示する。
(もっと読む)
走行支援装置、方法およびプログラム

【課題】走行安定性を低下させることなく目標位置において目標車速以下となるように走行支援を行うこと。
【解決手段】車両の前方に存在する目標位置および当該目標位置における目標車速を示す情報を取得し、前記車両の前方に存在する路面の摩擦度合が所定の基準より小さい低摩擦区間の長さを示す情報を取得し、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在する場合、前記車両の現在位置と前記目標位置との間に前記低摩擦区間が存在しない場合に前記目標位置において車速を前記目標車速以下にさせる走行支援を行う際の走行支援開始位置よりも、前記低摩擦区間の長さだけ車両側の位置から前記走行支援を開始するとともに、前記低摩擦区間においては前記走行支援を中断する。
(もっと読む)
車両用側面衝突判定装置および高電圧電源遮断装置
【課題】車室内スペースを有効活用し、コストの低減を図りつつ車両の側面衝突を確実に判定する上で有利な車両用側面衝突判定装置および高電圧電源遮断装置を提供する。
【解決手段】高電圧遮断装置20は、左右の加速度センサ12、14と、ECU22と、スイッチ24と、メインリレー26とを含んで構成されている。車両用側面衝突判定装置は、車両10の側面への衝突発生時に、衝突が発生した箇所が、左右の加速度センサ12、14のうち何れか一方の加速度センサの近傍であった場合には、非衝突側の側面に設置された加速度センサを選択し、衝突が発生した箇所が、左右の加速度センサ12、14から離れた、車両10の側面の後方寄りの箇所である場合に、衝突側の側面に設置された加速度センサを選択してその検出加速度に基づいて衝突の有無を判定する。高電圧電源遮断装置20は、衝突が検出された場合に高電圧電源28を遮断する。
(もっと読む)
車載通信装置
【課題】車両の停車位置が無線通信部と移動体通信網との間で無線通信を不可能な区域である場合に、その旨をユーザに適切に認識させる。
【解決手段】車載通信装置1は、車両が停車状態であると判定し、無線通信部3と移動体通信網との間で無線通信を不可能であると判定すると、車両の停車位置が無線通信部3と移動体通信網との間で無線通信を不可能である旨を示すアラーム表示情報を表示させたりアラーム音声情報を音声出力させたりハザードランプ14を点滅させたりする。
(もっと読む)
車両制御装置
【課題】自車両と前方物標との間の衝突を防止するための運転支援を、衝突の危険性の度合に応じて行うことができる車両制御装置を提供する。
【解決手段】判定ユニットにより、少なくとも自車両と前方物標との間の相対速度に基づいた第1の値と、前記自車両と前記前方物標との間の相対加速度に基づいた第2の値の算出および前記第1の値、前記第2の値が閾値を超えたか否かの判定を行い、前記判定ユニットにより前記第1の値、前記第2の値が閾値を超えたと判定され、運転支援ユニットが前記自車両の運転支援を行う際、前記第1の値及び前記第2の値の双方が閾値を超えた場合は、前記第1の値もしくは前記第2の値の一方が閾値を超えた場合よりも、前記運転支援の介入量を多くする。これにより、自車両と前方物標との間の衝突を防止するための運転支援を衝突の危険性の度合に応じて行うことができる。
(もっと読む)
安全度提示装置及びプログラム
【課題】自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させる。
【解決手段】追従状況判定部22で、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定し、追従度算出部24で、先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、車間距離及び相対速度Vrを用いた追従度、車間距離及び自車両の速度Vfを用いた追従度、並びに車間距離及び先行車両の減速度Apを用いた追従度を含む複数の追従度を算出し、安全度演算部26で、算出された複数の追従度に基づいて、1つの追従安全度を演算し、表示装置18に表示する。安全度更新部28では、安全度演算部26での演算の基準を走行開始からの経過時間に応じて更新する。
(もっと読む)
歩行者保護装置
【課題】フロントピラーの車両前方にエアバッグを膨張展開させる歩行者保護装置において、エアバッグが車室内へ入り込むことを防止または抑制することができる歩行者保護装置を提供する。
【解決手段】フロントピラーの車両前方側へエアバッグを展開させる歩行者保護装置において、衝突予測時に、フロントドアガラスが所定位置より下降している場合(ε>ε0)には、フロントドアガラスを少なくとも前記所定位置まで上昇させる(ε=ε0)。その結果、フロントドアガラス上端とフロントドアフレームとの間の開口幅を狭くすることができるので、エアバッグの膨張展開時に、エアバッグが車室内へ入り込むことを防止または抑制できる。
(もっと読む)
移動体走行経路生成装置
【課題】求めた障害物回避経路の障害物に対する回避方向が、運転操作に基づき設定された障害物回避方向に一致するようにして、運転者に違和感を与えないようにした移動体走行経路生成装置を提供する。
【解決手段】(a)では、運転操作に基づく障害物回避方向X1、および初期目標回避経路候補X2を設定する。(b)では、第2リスクポテンシャルを生成するための仮想障害物32aを、目標回避経路候補X2を挟んで検出障害物32と反対側の位置に設定する。(c)では、仮想障害物32aに基づき生成した第2リスクポテンシャルを基に目標回避経路候補X2を目標回避経路候補X3に補正する。(d)では、新たな仮想障害物32bを設定し、これに基づき第2リスクポテンシャルを生成し直し、この第2リスクポテンシャルを基に目標回避経路候補X3を最終的な目標走行経路X4へと補正する。
(もっと読む)
車両情報の記録装置
【課題】車両の事故時の車両状況を正確に把握可能とするナビゲーションシステムを利用した車両情報の記録装置を提供する。
【解決手段】車両に関する情報を記録する事故記録制御部400が、レーダ800によって測距された車間距離が所定距離以下となった場合に、CCDカメラ500から取得した車両周囲の映像情報を記録する第1の記録処理と、衝突センサ700からの出力に基づき、CCDカメラ500から取得した車両周囲の映像情報を記録する第2の記録処理の2つの記録処理を含むように車両事故記録装置を構成する。
(もっと読む)
車両周辺障害物検出装置
【課題】障害物を検出する各センサにおいて、障害物検出処理が困難な環境条件に対して適合的に調整を行い、安定性の高い障害物の検出を実現する。
【解決手段】処理パラメータを参照して、超音波により障害物のセンシングを行う超音波センサ101と、処理パラメータを参照して、センサ出力値に基づいて障害物の情報を検出する超音波信号処理部102と、処理パラメータを参照して、障害物の映像を撮影するカメラ103と、処理パラメータを参照して、撮影された映像に基づいて障害物の情報を検出する映像処理部104と、超音波信号処理部102により検出された障害物の情報と映像処理部104により検出された障害物の情報とを統合して映像を生成する障害物統合検出部105と、生成された映像を表示する表示装置106と、障害物の情報に基づいて、処理パラメータを調整するパラメータ調整部109とを備えた。
(もっと読む)
891 - 900 / 6,854
[ Back to top ]