
国際特許分類[B62D7/08]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 操向リンク;スタブ軸またはそれらの取付け具 (957) | 個別に枢着された車輪用のもの,例.キングピンによるもの (749) | 車両の縦方向の中心線に対して横方向に単一面に位置している枢軸 (313)
国際特許分類[B62D7/08]の下位に属する分類
操向される車輪それぞれの操向角度間の比を変える手段に特徴のあるもの
単一出力操向伝動装置をもつもの (2)
一対の操向伝動装置を持つもの (3)
国際特許分類[B62D7/08]に分類される特許
61 - 70 / 308
ステアバイワイヤ式操舵装置
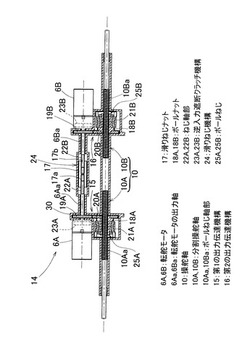
【課題】 転舵モータ失陥時にも転舵可能なフェールセーフ機能を有し、かつトー角の調整が可能なステアバイワイヤ式操舵装置を提供する。
【解決手段】 操舵軸10と機械的に連結されないステアリングホイール1と、その操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを与える操舵反力モータ4と、2つの転舵モータ6A,6Bと操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6Aの出力を操舵軸10に伝達する出力伝達機構15と、他の転舵モータ6Bの出力を操舵軸10に伝達する出力伝達機構16とを設け、転舵を行う。両転舵モータ6A,6Bの出力軸を滑りねじ機構24を介して結合する。両転舵操モータの一方が失陥したとき、他方の出力を滑りねじ機構24を介して失陥した転舵モータに対応する出力伝達機構15(16)に伝達する。
(もっと読む)
車両挙動制御装置

【課題】 アクチュエータの作動遅れを補償するとともに、走行状態に適した応答性を実現できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS23で車速Vに所定の車速係数Kvを乗じて車速補正値Fcvを算出した後、ステップS24で路面μに所定のμ係数Kμを乗じてμ補正値Fcμを算出する。次に、ATTS−ECU16は、ステップS25で、フィルタ周波数ベース値Fbに対して車速補正値Fcvを減じるとともにμ補正値Fcμを加えることにより、可変ローパスフィルタ63のフィルタ周波数Ffを設定する。これにより、フィルタ周波数Ffは、車速Vが高くなるほど低くなり、路面μが高くなるほど高くなる。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 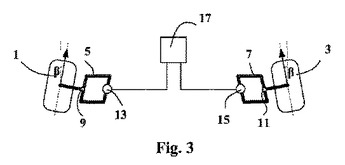 (もっと読む)
(もっと読む)
タイロッド
ネジ付きスリーブ(3)が、完全に、チューブ(2)の終端部分に収容されており、ネジ付きスリーブ(3)が、チューブ(2)の開口側に連結用輪郭(6)を備えることを特徴とする、少なくとも片側に第1の回転方向に可動の内ネジ(1)を備えたチューブ(2)を有し、このチューブ内に、終端側からネジ付きスリーブ(3)がねじ込まれており、このネジ付きスリーブ(3)が、第1の回転方向とは反対に可動の内ネジ(4)を備え、この内ネジに、シャフト(5)がねじ込まれている、構造ユニットと、
ネジ付きスリーブ(3)の連結用輪郭(6)が、工具(18)又はアダプタ(17)を介してネジ付きスリーブ(3)の回転運動のために必要なトルクを調整するために使用されることを特徴とする、シャフト(5)とチューブ(2)が、ネジ付きスリーブ(3)の回転によって、チューブ(2)内を反対方向に移動される、このような構造ユニットを使用するための方法と、
このための2つの異なった工具と、その実施バリエーションが構造要素と関係する自動車用のタイロッド。  (もっと読む)
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両用ステアリング装置
【課題】 ホイールと車体との干渉を抑制しつつ操舵角の増大を実現できる車両用ステアリング装置を提供する。
【解決手段】 アッパステアリングギヤ12uは、アッパフレーム2の上面に前後動自在に保持された第1スライダ21および第2スライダ22と、第1スライダ21を前後に駆動する第1スライドアクチュエータ23と、第2スライダ22を前後に駆動する第2スライドアクチュエータ24と、第1スライダ21の後端に設置されたスイングアクチュエータ25と、第1スライダ21の後端とスイングアクチュエータ25とナックル11の上面後部とに連結された第1ステアリングアーム26と、第2スライダ22の前端とナックル11の上面前部とに連結された第2ステアリングアーム27とを主要構成要素としている。
(もっと読む)
障害物回避支援装置
【課題】乗員に違和感を与えることなく、又は、与える違和感を少なくして車高を上げることが可能な障害物回避支援装置1aを提供する。
【解決手段】車高調整装置9を制御して車高を調整し、車両Cに障害物を跨いで回避させる障害物回避支援装置1aにおいて、車両Cの状態量に応じて、障害物を跨ぐ際の車高を変化させ、車両Cが旋回中には、車両Cの車輪11、21の舵角を調整する舵角制御装置1bを制御して、障害物に内輪近傍を通過させ、車高を変化させる際には、車両Cの後輪21の舵角を調整する舵角制御装置1bを制御して後輪21をトーインにする。
(もっと読む)
車両操舵装置
【課題】少なくとも前輪の転舵角及び車速に基づいて左右の後輪舵角を変更可能とする車両操舵装置において、雨天時の後輪タイヤによる泥水の跳ね上げを少なくする。
【解決手段】ワイパ速度センサや雨滴センサの入力信号に基づいて走行中における降雨量を推定する降雨量推定手段と、後輪の目標舵角が、推定降雨量に対応して設定される、許容最大舵角を超えないように制限する補正手段とを備えて、降雨時の後輪の可動角度を制限するようにした。
(もっと読む)
車両運動制御装置
【課題】セルフステア状態が発生しても、実ヨーレートを適正に制御できる車両運動制御装置を提供する。
【解決手段】予め取り決められた規範ヨーレートを目標値として車両に発生する実ヨーレートを制御するダイレクトヨーコントロールデバイスを有し、ステアリング装置にセルフステアが発生すると、規範ヨーレートに替えて、実ヨーレートを抑制するように目標値を設定する。セルフステア状態を原因として発生する実ヨーレートを、一律に抑制して低減させるので、運転者に違和感を与えることのない適正な制御を実ヨーレートに行うことができる。
(もっと読む)
車両挙動制御装置
【課題】左右の後輪の一方のトー角が制御不能になった場合において、車両挙動をすばやく安定化させることが可能な車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置30Aは、左右の後輪WRL,WRRの一方に対応する後輪トー角変更部21L,21Rが失陥した場合に、左右の後輪WRL,WRRの一方に対応する後輪トー角検出部22L,22Rの検出結果に基づいて、左右の後輪WRL,WRRの他方に対応する後輪トー角変更部21L,21Rを制御することによって、左右の後輪WRL,WRRの他方のトー角を左右の後輪WRL,WRRの一方のトー角に合わせて左右の後輪WRL,WRRの合計トー角をゼロにするとともに、前輪転舵部23を制御することによって、左右の後輪WRL,WRRのトー角によるヨーレートを打ち消すように左右の前輪WFL,WFRを転舵させる。
(もっと読む)
61 - 70 / 308
[ Back to top ]