
国際特許分類[G01C11/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 写真計量または映像計量,例.ステレオ法を用いた測量;写真測量 (242) | 写真の判読 (149) | 同一地域の2枚以上の写真の比較によるもの (117)
国際特許分類[G01C11/06]の下位に属する分類
撮影されたときと同じ相対位置に写真を支持しないもの (1)
撮影されたときと同じ相対位置に写真を支持するもの
写真上のデータを記録するために特に付設する物,例.プロフィル用
国際特許分類[G01C11/06]に分類される特許
11 - 20 / 116
モバイルマッピングシステム、及びこれを用いた沿道対象物の計測方法と、位置特定プログラム
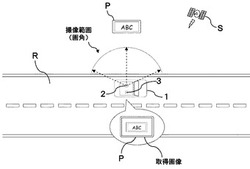
【課題】本願発明の課題は、従来技術が抱える問題、すなわちレーザ距離計を用いた計測では沿道状況の変化に追随して手軽に計測できないという問題、写真計測技術を利用した場合には計測精度が劣るという問題、を解決することであり、手軽に計測できるものであって、費用のかかる計測機器も必要とせず、しかも高い位置精度を確保できる、モバイルマッピングシステム、及びこれを用いた沿道対象物の計測方法と位置特定プログラムを提供することにある。
【解決手段】本願発明のモバイルマッピングシステムは、取得画像中の沿道対象物の特徴点を指定すると該特徴点を含む画像から2つの最適画像を自動抽出し、撮像手段位置及び撮像方向と2つの最適画像に基づいて指定された特徴点の位置を特定するものであり、2枚の最適画像の撮像方位の交差角が90°又は略90°となるような組み合わせとしたものである。
(もっと読む)
移動基準点写真測量装置および方法

【課題】広範囲における連続的な写真測量が可能であり、かつ安価な移動基準点写真測量装置および方法を提供する。
【解決手段】対象物に対して移動する3つ以上の移動基準点2と、対象物に対して移動し、移動基準点2とともに対象物を写真撮影する2台以上のカメラ3と、移動基準点2の絶対座標を測定する位置測定手段4とを備える。カメラ3を移動させつつ連続的に写真撮影することにより広範囲における写真測量を行うことができる。対象物に基準点を設置する必要がなく、IMU等の高価な測定機器を設置する必要がないため、測量のコストを低くすることができる。ジャイロを使用しないため、ドリフト誤差が累積することがなく、安定した精度で測量できる。
(もっと読む)
建設機械制御システム
【課題】簡単な機器構成で作業部位に対する作業具の位置、状態を正確に把握し得る建設機械制御システムを提供する。
【解決手段】建設機械が作業具7と、該作業具7を支持し、該作業具7に所要の作動をさせる作業アーム5とを具備し、作業具7、作業アーム5は同一の回転平面内を作動する様構成され、作業アーム5にラインレーザ照射部23が設けられ、該ラインレーザ照射部23から照射されるラインレーザ24が形成する平面は前記回転平面内にあり、ラインレーザ24は作業部位に照射され、作業部位に基準線24aを形成する様に構成された。
(もっと読む)
航空写真撮像方法及び航空写真撮像装置
【課題】簡単な構成で、正確な地形の3次元計測が可能な航空写真撮像方法及び航空写真撮像装置を提供する。
【解決手段】GPS装置23と、下方を撮像する撮像装置13とを具備する飛行体を蛇行飛行させ、蛇行飛行で方向変換する各頂点で撮像し、少なくとも隣接する3頂点で撮像した画像の共通オーバラップ部分から特徴点を抽出し、画像の内の2つの頂点の2画像を組とし、少なくとも2組について、各組毎に前記GPS装置23により測定した2つの頂点の位置情報と、2画像の特徴点とに基づき特徴点に対応する測定点の写真測量を行い、測定点の測量結果が少なくとも2組で一致した場合の特徴点を画像の合成用のタイポイントとする。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
キャリブレーション装置、キャリブレーション装置のキャリブレーション方法およびキャリブレーションプログラム
【課題】MMS(モービルマッピングシステム)の車両に取り付けたカメラの取り付け位置および姿勢角を容易に高い精度で計測できるようにすることを目的とする。
【解決手段】特徴点抽出部231は、全周画像データ289のカメラ画像毎に複数の特徴点を抽出し、特徴点毎に特徴量を算出する。特徴点マッピング部232は、カメラ画像の複数の組み合わせを生成し、カメラ画像の組み合わせ毎に対応する特徴点を抽出する。特徴点測量部233は、カメラ外部パラメータ299に基づいて、カメラ画像の組み合わせ毎に対応する特徴点の三次元座標値を算出する。パラメータ評価値算出部241は、レーザ計測点の三次元座標値と特徴点の三次元座標値とを比較してパラメータ評価値294を算出する。パラメータ評価値294が適正な値でない場合、パラメータ更新部243は新たなカメラ外部パラメータ299を算出する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド
【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
11 - 20 / 116
[ Back to top ]