
国際特許分類[G01S13/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 路離のみを測定するための方式 (942) | 持続非変調波,振幅―,周波数―,または位相変調波を送信するもの (521) | 受信信号と送信信号との位相を比較するもの (61) | 2以上の変調周波数を使用するもの (21)
国際特許分類[G01S13/38]に分類される特許
11 - 20 / 21
液面に向かって放射されるレーダ信号および液面から反射されるレーダ信号によって液体のレベルLを正確に決定する方法およびデバイス
本発明は、液面に向かって放射されるレーダ信号および液面から反射されるレーダ信号によって液体のレベルを正確に決定する方法に関する。本発明は、さらに、本発明に従った方法によって液体のレベルを正確に決定するデバイスに関し、このデバイスは、液体に向かってレーダ信号を放射し、かつ液面から反射されたレーダ信号を受信するために液体の上に配置されたレーダアンテナ、ならびに、放射されたレーダ信号および反射されたレーダ信号に基づいて液体レベルを決定する手段を少なくとも備える。 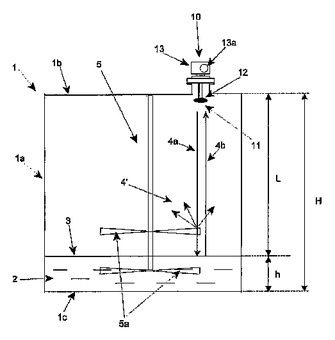 (もっと読む)
(もっと読む)
目標測位装置
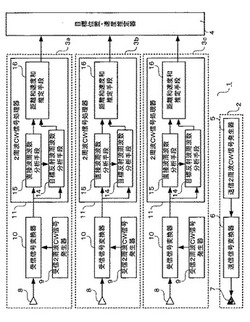
【課題】狭帯な受信機帯域で低速信号処理且つ高分解能を有し、送信局と受信局間の時刻の同期が必要なく、小口径のアンテナを備える小型の受信局からなり、運用が柔軟で低コストの目標測位装置を提供する。
【解決手段】目標測位装置は、送信局は2周波CW電波を放射し、3つ以上の受信局は、2周波CW電波と同様なローカル信号で直接波、または目標反射波をミキシングして直接差信号または目標反射差信号を求め、直接差信号の出力が最大になる直接波周波数を算出するとともに目標反射差信号の出力が最大になる目標反射波周波数を算出し、算出された直接波周波数と目標反射波周波数とに基づいて送信局と受信局との距離和と相対速度和とを推定し、目標位置・速度推定器は、距離和と相対速度和とから目標の3次元位置座標と3次元相対速度成分とを推定する。
(もっと読む)
レーダ装置

【課題】広角2次元監視をおこなうモノパルス方式のレーダを用いて、物体の種別を精度よく判定しうる安価な監視レーダ装置を提供する。
【解決手段】角度計測にモノパルス方式を採用したレーダ装置を用いて、監視領域内を移動する物体上の複数の箇所における反射波を受信し、各反射波について反射箇所を計測する。そして、計測データに基づき、移動物体の位置と監視レーダ装置の測角方向における大きさを算出する。
(もっと読む)
距離測定装置、及び距離測定方法
【課題】 定在波を利用した距離測定装置と同様に、「単純な構成」、「近距離測定が可能」、「測定誤差が小さい」という特徴を備え、かつドップラー効果による影響を実用上受けない距離測定装置及び距離測定方法を提供する。
【解決手段】 特定の帯域幅内において異なった複数の周波数成分を有する信号を出力する信号源1と、信号を波動として送信する送信部2と、送信された進行波VTと進行波VTが前記測定対象物6によって反射された反射波VRkとの混合波VCを検出する混合波検出部3と、検出された混合波VCの周波数成分を分析する周波数成分分析部4と、分析されたデータをスペクトル解析することによって距離スペクトルを求め、測定対象物6までの距離を演算する距離演算部5とからなる。
(もっと読む)
防犯センサ
【課題】検知対象物体の移動方向や位置に関わらず常に的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向情報を出力するマイクロウエーブセンサ320と、これによって得られる2次元物体位置情報の時間的な変化に基づいて前記物体の移動パターンを認識し、その移動パターンに基づいて前記検知エリア内に検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段332と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段333とを備える。
(もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
移動物体検出装置
【課題】 ドップラ信号を利用する移動物体検出装置において、低速及び高速の移動物体をそれぞれ高精度に検出するために速度範囲別に周波数分析すると処理負荷が増大する。
【解決手段】 フィルタ部320,322はそれぞれ、受信信号から、移動物体の高速、低速の別に、対応する周波数帯域のデータを抽出する。高速対応のデータに関しては、所定の時間フレームにて得られるN個が合成部340に入力される。一方、低速対応のデータに関しては、高速対応のデータより長い時間フレームにて得られるデータを間引いてN個のデータを取り出し、合成部340に入力する。合成部340は、周波数シフト処理を行い、高速対応のデータの周波数スペクトルと重複しない領域に低速対応のデータの周波数スペクトルを移動させる。しかる後、両速度域のデータを互いに加算し、得られたN個のデータを用いて周波数分析を行う。
(もっと読む)
定在波測距装置
【課題】 定在波測距装置において、距離測定の高精度と高速化を両立させる。
【解決手段】 信号送受信部2から周波数をステップ状に変化させた送信信号を送出させ、サンプリング部3では受信信号の定在波を送信信号の周波数に同期したタイミングでサンプリングする。第1の距離計測部22で周波数ごとに空間伝播遅延時間に対応するサンプリング波形の振幅変動区間の時間幅に基づいて第1の距離値R1を算出するとともに、第2の距離計測部23で振幅が変動する区間を除く領域の振幅情報を、送信信号の周波数ごとに並べて生成した振動波形の振動周期に基づいて第2の距離値R2を算出する。周波数ステップごとに距離値R1が得られるので、精度の高い距離値R2とともに高速化が図れる。
(もっと読む)
物体検知センサ
【課題】センサの真下付近を含む所定の監視領域に対して物体の位置を精度良く計測することができる物体検知センサを提供すること。
【解決手段】監視領域をセンサ2からの距離に応じて複数の区画11,12,13に分割し、各区画を検知範囲とする複数のアンテナ3,4,5を切り替えて使用し、信号処理回路8において電波レーダの出力情報と電波照射経路とを照合することによって、設置したセンサの真下を含む領域において物体の監視面内での位置及び高さを計測する。
(もっと読む)
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
(もっと読む)
11 - 20 / 21
[ Back to top ]