
国際特許分類[G01S15/89]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 特定の応用に特に適合したソーナ方式 (582) | マッピングまたはイメージング用のもの (184)
国際特許分類[G01S15/89]に分類される特許
31 - 40 / 184
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた情報から前記探知対象物の位置を特定する音波を用いた探知方法。
(もっと読む)
港湾構造物計測装置

【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
水中構造物点検システム及び画像処理装置
【課題】水中構造物の点検の作業効率を向上し、コストを抑制できる水中構造物点検システム及び画像処理装置を提供する。
【解決手段】造影された映像において船舶が移動することで生じる歪みを補正するため、当該海域で予め測定された音速と、映像に生じている歪みの大きさとに基づいて船舶の移動速度を推定し、当該推定した移動速度を用いて映像の歪みを補正し、当該補正された映像を出力する。
(もっと読む)
物体の判別方法及び物体の判別装置
【課題】処理が複雑になることなく、被写体の領域を正確に判別することが可能な物体の判別方法及び物体の判別装置を提供する。
【解決手段】所定空間中に、幅を有する第1領域1と第2領域2とを備えた被写体3の第1領域1と第2領域2とを判別する物体の判別方法である。空間のイメージ画像17を取得する画像取得工程と、イメージ画像17を第1領域対応部11と第2領域対応部12とを有する2値化画像15を生成する2値化画像生成工程と、2値化画像15の収縮処理を行って、2値化画像15から第2領域対応部12を消滅させる収縮工程と、収縮処理を行った後に第1領域対応部11の膨張処理を行って処理画像16を作成する膨張工程とを備える。膨張処理を行った後に抽出された領域を第1領域1とするとともに、膨張処理を行った後の処理画像と収縮処理を行う前の2値化画像15との差分を第2領域2とする。
(もっと読む)
超音波探傷試験体の表面形状の同定方法並びに同定プログラム、開口合成処理プログラム及びフェーズドアレイ探傷プログラム
【課題】超音波を試験体に入射させたときの表面からの反射波を利用して試験体の表面形状を把握可能とする。
【解決手段】表面形状が変化した形状変化部を有する試験体の表面に、前記試験体の表面形状に沿って形態を変化させうる媒質を介してフェーズドアレイを配置し、前記フェーズドアレイの各振動子毎に超音波を試験体に向けて射出させて表面エコーを受信し、各振動子毎に取得された前記試験体の表面からの反射波を検出して各振動子から前記試験体の表面までのビーム路程を求めると共に、各振動子を中心とし各振動子毎に求まるビーム路程を半径とする円を想定し、隣り合う振動子を中心とする前記円の共通外接線を求め、前記共通外接線が求まる区間では前記共通外接線上の点を二次補間したものを試験体表面と同定し、前記共通外接線が求まらない区間ではそれら振動子間を形状変化の境界と判断して、各区間で得られた共通外接線上の点を二次補間し、これを外挿して前記境界における表面形状として同定し、試験体表面形状を求めるようにしている。
(もっと読む)
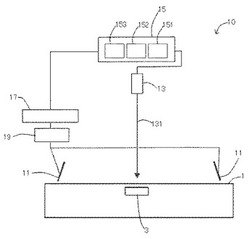
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた振動速度分布図から前記探知対象物の位置を特定する音波を用いた探知方法であって、音波発信源から音波を照射し、前記被照射体の表面を振動させる工程と、前記被照射体の表面のn箇所(n≧2)の測定個所を、各々、P1、P2・・・Px・・Pn(xは1〜nの整数)とし、それらの測定箇所の各々において、照射した音波の周波数がωである場合の前記被照射体の表面の振動速度を測定し、Pxにおける前記振動速度をEx(ω)とする工程と、特定の情報処理を行う工程とを備える探知方法。
(もっと読む)
水中音波撮像装置
【課題】 底質が既知でない条件下において、臨界俯角による埋没物体の検出ミスを回避し、また高感度な沈底機雷と埋没機雷の判別技術を提供する。
【解決手段】 ソーナーを備えた移動体10が移動し、ソーナーの送信投影面16が移動するにつれて水底11付近の物体を見る俯角が変化し、画像の視野内に物体が存在している間に俯角が臨界俯角12より小さくなると、その物体が水底堆積層に埋没していたら物体からのエコー受信強度が急に低下する現象を利用する。順次得る複数のソーナー画像13−1,13―2,13−3の間で、物体を示す輝度ピークの値または物体からの受信信号強度を追跡し、追跡した値が所定閾値を横切って低下した場合は、その物体は埋没機雷、追跡した値が閾値を横切らない場合は沈底機雷であると判別する。
(もっと読む)
音響波イメージング装置または音響波イメージング方法
【課題】音響波イメージング装置において、CMP法による計算を高速処理するための技術を提供する。
【解決手段】複数の音響波受信素子による受信信号の位相を揃える整相部と、位相が揃えられた受信信号を複素信号化する複素信号化部と、複素信号の相関行列を計算する相関行列計算部と、相関行列と予め定められた拘束ベクトルとを用いて受信信号の拘束付最小電力を計算する電力計算部とを有し、相関行列計算部は、所定の周期で前記相関行列を計算して電力計算部に順次出力するものであり、電力計算部は、入力された相関行列のそれぞれを用いた拘束付最小電力計算を並行的に行うものである音響波イメージング装置を用いる。
(もっと読む)
フェーズドアレイ超音波探傷方法
【課題】焦点数を低減することにより、データ処理時間を短縮したフェーズドアレイ型超音波探傷システムを提供する。
【解決手段】並列配置した複数の超音波素子からなるセンサを用いるフェーズドアレイ型超音波探傷方法において、検査対象にセンサを用いて超音波を送受信して検査対象の形状を検知する形状測定ステップと、検査対象の脆弱性に関する情報と形状測定ステップによる形状の情報とから、超音波探傷領域を決定する超音波探傷領域決定ステップと、超音波探傷領域決定ステップで定めた検査対象内の超音波探傷領域に向けて、センサを用いてフェーズドアレイ型超音波探傷を実行する超音波探傷ステップを有する。
(もっと読む)
3次元探査装置
【課題】スキャニングソナーと同等の送信強度で探信波を送信しても、遠方の標的の位置及び量(魚量等)を、精度よく算出することができる3次元探査装置を提供する。
【解決手段】探信波を送信して当該探信波の反射波を受信する送受波部200から当該反射波の強度に応じた信号を取得し、探信波により探査される探査範囲における強度分布を含むボリュームデータを生成する3次元探査装置100において、3次元探査装置100が、設定された探査距離と、送受波部200が検出可能な反射波の最小値と、によって定まる値を超えないように、送受波部200が送信する探信波の立体角を制御する送受波制御部103を備える。
(もっと読む)
31 - 40 / 184
[ Back to top ]