
国際特許分類[G01S5/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 電波源の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (174)
国際特許分類[G01S5/06]に分類される特許
61 - 70 / 174
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
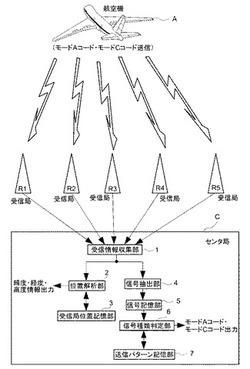
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
落雷電柱検索システム、落雷電柱検索方法および落雷電柱検索プログラム

【課題】 落雷によって影響を受けたおそれがある電柱をより適正に特定する。
【解決手段】 停電が発生した場合に、その停電日時と配電線の停電領域を特定する配電自動化システム2と、落雷が発生した場合に、その落雷日時と落雷位置を標定する落雷位置標定システム3と、配電線の電柱の位置情報を記憶した電柱データベース43と、配電自動化システム2によって特定された停電領域内で、かつ、落雷位置標定システム3によって標定された落雷位置SPから所定の範囲SR内に位置する電柱を、電柱データベース43から検索する検索タスク46と、を備える。
(もっと読む)
移動局の状態検出システム
【課題】移動局を設けた設置対象の状態を推定する。
【解決手段】移動局タグTは偏波方向が固定であるタグアンテナ32を備える。固定局リーダRは、互いに交差する2つの偏波面を生成可能な備えたリーダアンテナ12と、電波信号の受信時刻を検出する到来時間検出部19と、リーダアンテナ12の2つの偏波方向における受信信号強度をそれぞれ検出するRSSI部17とを備える。管理サーバSは、到来時間検出部19で検出した受信時刻に基づき移動局タグTから固定局リーダRまでの距離を検出し、かつRSSI部17で検出した2つの偏波方向での受信信号強度に基づき移動局タグTの姿勢を検出し、それら距離及び姿勢検出結果に応じ移動局タグTの状態判定を行う。
(もっと読む)
測位システム及び測位方法
【課題】測位目標が放射する電波を複数の移動体で受信しこれらの間で生成される到来時間差、到来周波数差を用いて目標の位置を特定する測位精度のよい測位システムを得る。
【解決手段】位置が未知な電波放射源1が放射する電波を受信して観測する受信手段を搭載した少なくとも2つの移動プラットフォーム3a,3bと、各移動プラットフォームからの観測情報の受信信号、移動ベクトル情報及び位置情報から受信信号の到来時間差及び到来周波数差を求め電波放射源の位置を標定する信号処理手段35と、各移動プラットフォームからの観測情報の移動ベクトル情報に基づき各移動プラットフォームにおける次の観測における最適移動方向及び最適移動速度を計算し各移動プラットフォームへそれぞれの計算結果を送り、各移動プラットフォームへ同期した移動観測を行わせる最適移動ベクトル計算手段36と、を備える。
(もっと読む)
測位システム、基地局、及び移動局
【課題】ジッタによる測距への影響を低減し、測距精度を向上する。
【解決手段】測位システム8は、測距用電波信号を複数回送信する移動局10と、送信された測距用電波信号を受信する基地局12A〜Dと、予め算出された、受信信号の時間分散と受信信号強度との相関を格納保持した記憶部45とを有し、複数回の測距用電波信号の送信時に、各回の測距用電波信号が相関上において互いに異なる測定点となるように異点化処理し、基地局12A〜Dで複数回受信した測距用電波信号のうち、記憶部45に記憶された相関に応じて選択された測距用電波信号に基づき、移動局10から基地局12A〜Dまでの測距処理を行う。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
移動局測位システム
【課題】基地局数が増加しても演算量が増加したり、あるいは移動局の大型化や高コスト化を伴うことなく精度の高い移動局の測位を行なうことのできる移動局測位システムを提供する。
【解決手段】複数の基地局12が受信する電波に含まれる拡散符号とレプリカ符号との相関値の大きさを予め定められた関係に基づいて算出する相関演算部64と、相関演算部64によって算出された相関値の大きさに基づいて予め記憶された関係から移動局10から各基地局12への無線通信における通信誤差に関する誤差関連値を各基地局12について算出する相関値誤差変換部68と、誤差関連値に基づいて予め記憶された関係により測位における各基地局12の重みを表す重み行列を決定する重み行列生成部72と、複数の基地局12のそれぞれにおける移動局10から送信される電波の受信結果と重み行列とを用いて、移動局10の位置を算出する測位部とを有する。
(もっと読む)
汎用ポジショニングプロトコル
態様では、汎用ポジショニング方法(GPP)を使用して、異なるアクセスタイプに対して衛星ベースおよび地上ベースのポジショニング方法をサポートする。端末は、GPPによってサポートされている、ポジショニング方法とアクセスタイプとに対する第1の情報を有する第1のGPPメッセージを交換する。端末は、ポジショニング方法とアクセスタイプとに対する第2の情報を有する第2のGPPメッセージを交換する。それぞれのGPPメッセージは、少なくとも1つのポジションエレメントを含んでいてもよく、それぞれのポジションエレメントは、特定のポジショニング方法に対するものであってもよい。端末は、第2の情報に基づいて、端末自体に対するポジション推定値を取得する。別の態様では、ポジショニングは、異なるワイヤレスアクセスタイプのセルに対する測定値に基づいて実行されてもよい。 (もっと読む)
移動局測位システム
【課題】3次元空間を移動する移動局の位置の算出を4つ未満の基地局により実行可能な移動局測位システムを提供する。
【解決手段】前記移動局の床面からの高さhについての情報である高さ情報を検出する高さ検出部と、受信時刻検出部により検出された各基地局12における電波の受信時刻に関する情報である受信時刻情報と、前記高さ検出部によって検出された前記移動局10の高さ情報と、前記各基地局12の位置についての情報である位置情報とに基づいて前記移動局10の位置の算出を行なう測位部50とを有する。
(もっと読む)
距離測定方法、距離測定用受信局装置及び位置測定システム
【課題】屋内のマルチパス環境下においても、高分解能の遅延時間測定を可能とする。
【解決手段】サブキャリアの周波数が同期したマルチキャリア信号を受信局Rで受信し、サブキャリア毎に、コンスタレーションデータ18の位相及び振幅データである周波数領域コンスタレーションデータ26を得、送信局Tからの受信信号を、その伝播パスに応じて、それぞれ振幅Ai、遅延時間Τi、位相Θiが異なる複数の遅延信号の合成遅延信号として表した時、周波数領域コンスタレーションデータ26と、前記遅延信号との残差が少なくなる遅延時間Τiから送信局Tと受信局Rの相対的な距離を求める。
(もっと読む)
61 - 70 / 174
[ Back to top ]