
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
121 - 130 / 1,802
非接触入力処理システム、その制御方法及び制御プログラム
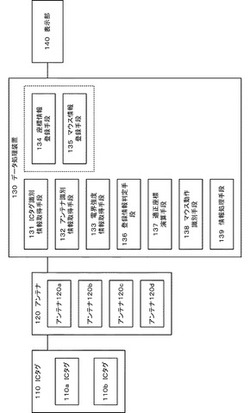
【課題】マウスによる動作入力を、マウスを用いずに簡易に実現可能な非接触入力処理システム、その制御方法及び制御プログラムを提供する。
【解決手段】データ処理装置130のICタグ識別情報取得手段131が、ICタグ110の識別情報を取得する。電界強度取得手段133は、ICタグ110の電界強度を識別情報に対応付けて取得する。適正座標演算手段137は、ICタグ110の識別情報と各ICタグ110の電界強度と、から3次元座標エリア上におけるICタグ110の適正座標を演算する。マウス動作識別手段138は、ICタグ110の識別情報と電界強度とその状態の維持時間と、の関係を、マウス情報登録手段135により登録された各種マウス動作情報と照合することで、マウス動作を識別する。
(もっと読む)
複数のキャリアを用いた位置決め
モバイル・デバイスと、少なくとも1つのマルチ・キャリア信号でモバイル・デバイスと通信している無線トランシーバとの間の距離推定値を判定する方法は、少なくとも1つのマルチ・キャリア信号を受信することと、少なくとも1つのマルチ・キャリア信号から、少なくとも1つのキャリア信号を選択することと、少なくとも1つのマルチ・キャリア信号から、少なくとも1つのキャリア信号の信号特性を測定することと、少なくとも部分的に信号特性に基づいて、モバイル・デバイスと無線トランシーバとの間の距離推定値を判定することとを含む。 (もっと読む)
測位システム

【課題】RSSIを測定するための回路を必要とせず、また、演算を行うことも無く、簡便な方法でリーダライタとタグとの距離を検出することができるようにすることを目的とする。
【解決手段】測位システムのリーダライタ装置は、送信電力を段階的に変えて、当該送信電力を示す電力値を含む質問信号を繰り返し送信し、タグは、質問信号を受信し、当該質問信号に含まれている電力値を含ませた応答信号を送信し、応答信号を受信したリーダライタ装置は、応答信号に含まれる電力値と自装置の識別情報とを管理装置に送信し、管理装置は、受信した電力値と識別情報とに基づいて、前記タグの位置を検出する。
(もっと読む)
無線通信装置、無線通信システム、及び直接波の受信タイミング検出方法
【課題】送信電力を増大させることなく、より高精度に直接波の受信タイミングを検出することが可能な無線通信装置を提供すること。
【解決手段】所定時間毎に所定の規則で変更される中心周波数を持つ信号を受信する信号受信部と、前記信号受信部で受信された信号から、前記所定の規則に基づいて受信時に未使用となる周波数領域の信号成分を除去する未使用領域成分除去フィルタと、前記未使用領域成分除去フィルタを通過した信号成分に逆変調処理を施す逆変調部と、所定期間について前記逆変調部で逆変調処理が施された信号成分を累積加算して加算信号を生成する信号加算部と、前記信号加算部で生成された加算信号から得られるインパルス応答に基づいて直接波の到来時刻を決定する直接波到来時刻決定部とを備える無線通信装置が提供される。
(もっと読む)
移動通信方法及び無線基地局
【課題】移動局UEの測位精度の改善を図る。
【解決手段】本発明に係る無線基地局eNBは、移動局UEとの間の上りリンクにおいて同期が確立されていない状態で、測定トリガを検出した場合に、移動局UEに対して、RAプリアンブル割当信号を送信するように構成されている下りデータ再開処理部12と、RAプリアンブル割当信号で割り当てられたRAプリアンブルの受信に応じて、上りリンクにおける伝搬遅延を算出するように構成されている伝播遅延算出部14とを具備する。
(もっと読む)
所有者識別システム
【課題】無線端末の所有者を識別することができる所有者識別システムを提供する。
【解決手段】所有者識別システム100は、複数の人間が居るショッピングモールなどに設置された6台のLRF16a,16bと、AP14を有する中央制御装置10とを含む。中央制御装置10は、或る人間が所有する携帯端末12と、AP14との電波強度rを測定すると共に、LRF16a,16bによって検出される複数の人間の位置(x,y)からAP14までの距離dを算出する。また、中央制御装置10は、事前学習によって作成した分析テーブルから、電波強度rに対応する平均距離Dと標準偏差σを特定する。そして、中央制御装置10は、人間毎に、携帯端末12を所有する確率を求め、最大値かつ所定値以上である人間を携帯端末12の所有者として推定する。
(もっと読む)
ナビゲーションシステム
【課題】測位開始までの時間を短縮できるナビゲーションシステムを提供する。
【解決手段】電源オフ直前の現在地および衛星配置を表す情報をバックアップする現在地・衛星配置情報バックアップ部11と、電源オフ直前の時刻をバックアップする終了時刻バックアップ部12と、外部から現在時刻を取得する外部時刻取得部13と、バックアップされた電源オフ直前の時刻から現在時刻までの経過時間を算出する経過時間算出部14と、GPS(Global Positioning System)を用いて現在地を測位するGPS測位部15と、測位開始に必要な初期情報をGPS測位部に設定する初期情報設定部16と、経過時間算出部で算出された経過時間が所定時間より小さければ、現在地・衛星配置情報バックアップ部によりバックアップされた現在地および衛星配置を表す情報を、初期情報としてGPS測位部に設定するように初期情報設定部に指示する制御部17を備えている。
(もっと読む)
無線ネットワークにおいてピア・ツー・ピア位置決めを提供するための方法および装置
ピア・ツー・ピア位置決め動作を提供し、および/あるいはサポートするために、無線ネットワークで用いる方法および装置が提供される。 (もっと読む)
航空機位置測定システム、受信局、航空機位置測定方法およびプログラム
【課題】複数の受信局同士の高精度の時刻同期を容易に行うこと。
【解決手段】時刻同期処理部23は、GPS衛星9から到来する信号に基づき自己の受信局11−1の時刻を他の受信局11−2〜11−5の時刻に同期させる際に、GPS衛星9から到来する信号に基づき生成されるGPS同期信号の波形の規則的な変化に基づき設定される基準点から見た受信局11−1におけるクロック源の信号波形の所定の条件を満たすゼロクロス点を基準点に一致させるようにクロック源33の信号波形の位相を調整する航空機位置測定システム1を構成する。
(もっと読む)
検出システム及び検出方法
【課題】RFIDタグを検出することができる。
【解決手段】検出システム1はRFIDタグを内蔵するICカード2の周囲に配置され、RFIDタグとの間で信号をそれぞれ送受信する少なくとも3つのリーダライタ部3と、検出処理装置4とを有する。検出処理装置4は、リーダライタ部3にRFIDタグへ第1信号をそれぞれ送信させ、第1信号を送信した送信時刻と、第1信号の受信に応じてRFIDタグから送信された第2信号をリーダライタ部3が受信した受信時刻とをリーダライタ部3ごとに計測させる。また、送信時刻と受信時刻とを取得して、送信時刻と受信時刻とに基づきリーダライタ部3からRFIDタグまでの距離を伝搬する信号の伝搬時間をそれぞれ測定し、伝搬時間を基に距離をリーダライタ部3ごとに演算し、距離からRFIDタグの位置を演算する。
(もっと読む)
121 - 130 / 1,802
[ Back to top ]