
国際特許分類[G08G1/00]の内容
国際特許分類[G08G1/00]の下位に属する分類
歩行者用の誘導案内表示装置 (1,470)
計数または制御されるべき交通量の検出 (1,848)
道路のある区域内の車両または駐車区域にある車両を計数すること,すなわち入ってくる数と出て行く数との比較によるもの (14)
交通信号の制御 (406)
可変の交通指令をあたえるための装置 (10,001)
交通制御システムの監視,例.2つの交差する道路が同時に青信号になると警報をあたえるもの (23)
車両の位置の表示,例.時刻表によって運行される車両 (2,250)
駐車場における空席の表示 (388)
衝突防止システム (7,349)
国際特許分類[G08G1/00]に分類される特許
961 - 970 / 1,742
車載装置
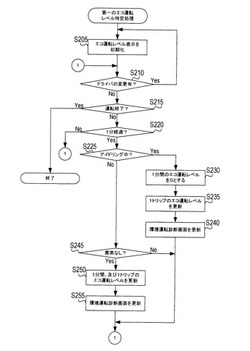
【課題】ユーザに対し、排気ガスの排出を抑えた状態、または、エネルギーの消費を抑えた状態のうちの少なくともいずれか一方の状態での運転であるエコ運転が行われた度合いについての適切な判定結果を速やかに把握させることが可能な車載装置を提供する。
【解決手段】運転開始後1分周期で到来する判定タイミングにおいて、1分前から判定タイミングまでの期間の自車両の運転と、運転開始後から判定タイミングまでの期間(1トリップとも記載)の自車両の運転とについて、複数の異なる観点で、エコ運転が行われた度合いについての判定(エコ運転判定)を行う。そして、ナビゲーション装置は、これらのエコ運転判定の判定結果に基づき、1分間の運転と1トリップの運転について、エコ運転が行われた度合いについての総合的な判定結果であるエコ運転レベルをそれぞれ特定し、表示する(S250)。
(もっと読む)
安全運転評価装置及び安全運転評価プログラム、並びにこれを用いたナビゲーション装置

【課題】一時停止地点における運転操作を適切に評価するとともに、運転者に対して、一時停止地点において適切な運転操作を行なおうとする意欲を高く維持させることができる安全運転評価装置を提供する。
【解決手段】自車位置が一時停止地点から所定の距離内にある場合に、車両の運転操作に関する評価項目に基づいて、一時停止地点に停止するための安全運転の程度を数値化して評価した評価点を導出する評価手段と、評価点に基づく評価情報を出力する出力手段と、を備え、評価手段は、一時停止地点から評価項目に係る運転操作を行なった地点までの距離を表す操作距離に応じて、同じ評価項目に係る運転操作に対して付与する評価点を変更する。
(もっと読む)
走行制御装置及び走行制御システム
【課題】車両の走行制御によって渋滞の発生の抑制又は渋滞緩和が行える走行制御装置及び走行制御システムを提供すること。
【解決手段】
車両が走行する道路の車線ごとの車両密度を含む交通状態を取得し(S10)、車線のうち車両密度が高い車線へ車両を車線変更させ(S18〜S26)、車両密度が高い車線へ車線変更した車両に対し車両密度が臨界密度に近づくほど車間距離が短くなりにくくなるように走行制御を行う(S28)。これにより、渋滞しそうな車線に車両を車線変更させて渋滞発生を抑制し、または渋滞を緩和させることができる。
(もっと読む)
車両周辺情報送信装置および交通事故情報収集システム
【課題】事故発生の通知が為されないという事態が発生したとき、あるいは、事故発生の通知が為されるタイミングが遅くなってしまったときでも、交通事故発生時の情報がセンタにおいて収集可能となるようにする技術を提供する。
【解決手段】車両周辺情報送信装置10は、事故多発地点1の近傍において、路側設備2または3から情報取得・送信要求信号を受信することに基づいて、自車両5〜8が事故多発地点1にいることを検出し、その検出に基づいて、自車両の車両周辺情報を、交通事故の情報を収集するセンタ4に送信する。
(もっと読む)
情報処理装置
【課題】ドライバー自らが前照灯を意図的に点灯させたことの評価を行うために必要な日没時刻を適切に算出する情報処理装置を提供する。
【解決手段】前照灯が点灯されたと判定した場合に(S330:Yes)、日没時刻を計算する(S345)。このようにすれば、日没時刻を常時計算し続ける場合と比較して日没時刻を計算する頻度が大幅に少なく処理負荷が低い。しかも、点灯時刻と関係なく日没時刻を算出する場合と比較し、算出された日没時刻は、点灯時刻を適切に評価することができる。
(もっと読む)
運転診断装置、及び運転診断システム
【課題】運転状態を診断して診断結果に応じた評価を行う(ポイントを付与する)運転診断装置、運転診断システムにおいて、診断及び評価をより適正なものとする。
【解決手段】運転診断装置では、ユーザの変更(切り替え)がなされると、変更前のユーザについての診断結果を一旦記録し(S180)、変更後のユーザについて改めて診断を開始する(S200)。このため、個々のユーザの運転状態が個別に診断されるため、診断結果は適切なものとなる。また、車両の走行距離が1.6km(車両を用いた短距離移動の場合の平均距離)未満の場合には(S170:NO、S210:NO)、ポイント付与の対象から除外すべくその走行区間の診断結果は記録しない。つまり、運転状態の評価(ポイント付与の是非)においては、環境面への影響度も加味されるようになっている。
(もっと読む)
坂道検出方法及び坂道検出装置
【課題】坂道の有無を高い精度で検出する坂道検出方法及び坂道検出装置を提供する。
【解決手段】所定の頻度で気圧計から気圧データを取得する気圧測定ステップと、所定の単位走行距離ごとに前記気圧データから高度を算出し、前回算出した高度との差異から、前記単位走行距離における勾配を算出する勾配算出ステップと、前記単位走行距離ごとに算出された前記勾配が、所定回数以上、連続して所定範囲内にある場合、坂道と判定して坂道信号を出力する坂道検出ステップと、を含む。
(もっと読む)
ナビゲーション装置
【課題】不特定多数の人が使用する車両に搭載されたナビゲーション装置において、個人情報を適切に保護する。
【解決手段】不特定多数の人が使用する車両に搭載されたナビゲーション装置は、車両の使用状況に関する情報を個人情報として記憶する。車両のACC電源がオフされたか否かを判定することにより、車両の使用者が変わる可能性があるか否かを判定し(ステップS20)、変わる可能性があると判定されたときに問い合わせ画面を表示して、記憶された個人情報を消去するか否かを問い合わせる(ステップS40)。この問い合わせに対するユーザの応答に応じて、記憶された個人情報を消去する(ステップS100)。
(もっと読む)
需要発生予測システム、需要発生予測装置、および需要発生予測方法
【課題】需要発生を精度良く予測できる需要発生予測システム、需要発生予測装置、および需要発生予測方法を提供し、サービス提供者の営業効率を向上させると共に、サービス利用者の満足度を向上させる。
【解決手段】需要発生履歴データ11と領域マッピングデータ12に基づいて、前需要発生領域から次需要発生領域への2点間遷移を示す遷移データを全ての需要発生について作成し、該遷移データにより、それぞれの前需要発生領域は遷移先としてどの次需要発生領域があるかを示す領域別遷移データを作成し、該領域別遷移データに基づいて、上記遷移先または上記遷移元の種類が多い需要発生領域の方が、上記遷移先または上記遷移元の種類が少ない需要発生領域よりも今後の需要発生の確率が高いとする需要発生予測を算出する需要発生予測ステップとを実行する。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
961 - 970 / 1,742
[ Back to top ]