
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
21 - 30 / 558
移動体判定情報生成装置、移動体判定情報生成システム、コンピュータプログラム及び移動体判定情報生成方法
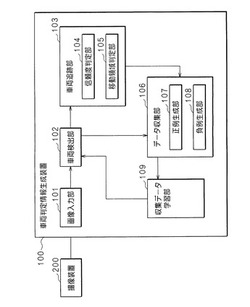
【課題】人手を介さずに移動体判定情報を生成することができる移動体判定情報生成装置、移動体判定情報生成システム、コンピュータプログラム及び移動体判定情報生成方法を提供する。
【解決手段】車両検出部102は、移動体を示す画素領域である移動体領域を検出する。車両追跡部103は、車両検出部102で検出した移動体領域を、その後の撮像時点での撮像画像上で追跡領域として追跡する。データ収集部106は、車両検出部102での検出結果及び車両追跡部103での追跡結果に基づいて、検出した移動体領域又は追跡した追跡領域が移動体を示すか又は非移動体を示すかを区別した移動体判定情報を生成する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム

【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、進行方向別通行区分の路面標示よりも進行方向側に停止線候補の路面標示を検出し、且つ最も分岐点側にある進行方向別通行区分の路面標示から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
車軸検出装置
【課題】積雪時など路面部分の距離分布の計測精度が低下する場合であっても、車軸の検出精度の低下を防止できる。
【解決手段】車軸検出装置(10)は、路面と照射光軸が交わるように赤外線を照射する赤外線照射部(121)と、赤外線が照射された被写体からの反射光をそれぞれ受光して、被写体像を取得する複数の画像取得部(123)と、複数の画像取得部(123)でそれぞれ取得された複数の被写体像に基づいて、前記被写体までの距離分布を検出する距離分布検出部(126)と、被写体に車両が含まれない場合の該被写体までの距離分布である背景距離分布を記憶する背景距離分布記憶部(131)と、検出された距離分布から車両に対応する部分の距離分布を車両距離分布として抽出する車両距離分布抽出部(132)と、抽出された車両距離分布と記憶された背景距離分布とが位置的に連続している場合に、車軸ありと判定する判定手段と、を具備する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、車両の走行する道路の路面色が変更した変更地点よりも進行方向側に停止線候補の路面標示を検出し、且つ該変更地点から車両の進行方向の所定距離以内に停止線候補の路面標示を検出した場合に、該停止線候補を停止線と特定するように構成する。
(もっと読む)
車両検出装置、車両検出システム及びコンピュータプログラム
【課題】輝度変化が少ない場合でも精度よく所定の警告灯を点滅している車両の検出を行うことができる車両検出装置、車両検出システム及びコンピュータプログラムを提供する。
【解決手段】時間差分画像生成部103は、撮像時点が異なる複数の撮像画像の画素値の差分に基づいて時間差分画像を時系列に複数生成する。一致・不一致判定部107は、時間差分画像生成部103で生成した時間差分画像のうちの直近の時間差分画像と他の時間差分画像との所定の画素ブロックの一致/不一致を判定する。車両検出部108は、一致/不一致判定部107で判定した一致/不一致の遷移回数に基づいて車両を検出する。
(もっと読む)
車両監視装置
【課題】車両監視装置の設置および設置後の位置調整を簡易に行うことのできる車両監視装置を提供する。
【解決手段】走行する車両を監視カメラで撮影し、撮影した画像を解析して前記車両の登録番号あるいは車色を取得する車両監視装置において、前記画像のエッジを検出し、該エッジの傾きから前記監視カメラの傾きを検出する傾き検出部と、前記画像内のナンバープレートの幅を認識し、該認識した幅と前記画像の幅をもとに前記カメラの視野幅を検出する視野幅検出部を備えた画像処理装置を備え、該画像処理装置は、検出した監視カメラの傾きおよび視野幅をもとに、前記監視カメラの傾き、およびカメラと監視対象車両位置との間隔の適否を判定し、否と判定したときその調整方向を指示する情報を表示装置に表示する判定部を備えた。
(もっと読む)
位置通知装置及び車両位置通知方法、並びに車載器、車両位置算出方法及びプログラム、並びに車両位置算出システム
【課題】車両位置の補正時に生じる誤差を小さくする
【解決手段】レーザセンサ1は、車両を検知する。ビーコン3は、レーザセンサ1が車両を検知した検知時刻と、当該車両が検知時刻に存在していた位置として補正させる位置である補正基準位置とを、無線通信により車載器4に通知する。車載器4は、車両が走行した距離に基づいて各時刻において当該車両が存在する位置を算出し、ビーコン3から受信した検知時刻と補正基準位置とに基づいて算出した位置を補正する。
(もっと読む)
車両用物体認識装置
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
カメラシステム
【課題】撮像画像の高視認性を低コストで実現でき、しかも、設置調整作業効率の改善および照明パターンを容易に最適化することができるカメラシステムを提供する。
【解決手段】移動物体が移動する移動路の側部に設置され移動路を移動する移動物体を撮像するカメラと、カメラの近傍に設置され移動物体の撮像時に照明光を照射するもので、その照明光を移動する移動物体に対し追尾動作可能な照明装置と、実際の稼動時の前に行なわれる調整時に移道路においてテスト移動物体を移動させることでテスト移動物体の移動軌跡を認識する手段と、移動物体の移動速度を測定する手段と、前記認識されたテスト移動物体の移動軌跡および前記測定された移動物体の移動速度に基づき照明装置における照明光の最適な追尾軌道を求め、この求めた追尾軌道に基づき照明装置の照明光を移動物体に対し追尾動作させる手段と、カメラから得られる画像を用いて所定の画像処理を行なう画像処理手段とを具備する。
(もっと読む)
車両周辺撮影装置
【課題】車両の周縁部直下付近を撮影することができる車両周辺撮影装置を提供する。
【解決手段】車両Vの前照灯1内に設けられたカメラ10と、前照灯1内に設けられ、カメラ10の光軸を車両Vの周縁部下方に導くレンズ13と、を備えた。
(もっと読む)
21 - 30 / 558
[ Back to top ]