
無段変速機及びロボット関節構造

【課題】 摩擦力に頼ることなく変速比を無段階に変化させることができ、且つ、設定した変速比を一定にすることができる無段変速機を提供する。
【解決手段】 直線方向に移動可能な第1ポスト部材P1が固定された入力部材2と、第1ポスト部材P1が移動可能な直線と平行且つ第1ポスト部材P1の移動方向に対して逆向きに移動する第2ポスト部材P2が固定された出力部材3と、前記直線方向に対して垂直な方向に移動する移動部材4を有する移動手段5と、移動部材4に回転自在に支持され且つ第1ポスト部材P1及び第2ポスト部材P2をスライド可能に保持するスライド孔61、62が形成された無段変速リンク6とを備え、移動手段5により無段変速リンク6の回転軸から第1ポスト部材P1が移動する直線までの距離と第2ポスト部材P2が移動する直線までの距離との距離比を調節することで変速比を無段階に変化させる無段変速機1。
【解決手段】 直線方向に移動可能な第1ポスト部材P1が固定された入力部材2と、第1ポスト部材P1が移動可能な直線と平行且つ第1ポスト部材P1の移動方向に対して逆向きに移動する第2ポスト部材P2が固定された出力部材3と、前記直線方向に対して垂直な方向に移動する移動部材4を有する移動手段5と、移動部材4に回転自在に支持され且つ第1ポスト部材P1及び第2ポスト部材P2をスライド可能に保持するスライド孔61、62が形成された無段変速リンク6とを備え、移動手段5により無段変速リンク6の回転軸から第1ポスト部材P1が移動する直線までの距離と第2ポスト部材P2が移動する直線までの距離との距離比を調節することで変速比を無段階に変化させる無段変速機1。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、摩擦力に頼ることなく変速比を無段階に変化させることができる無段変速機及びその無段変速機を用いたロボット関節構造に関する。
【背景技術】
【0002】
従来から一般的な減速機や変速機としては、歯車を利用したものや自動車等の駆動力の伝達に利用されているCVT(Continuously Variable
Transmission:連続可変変速機)等が知られている。歯車を利用した一般的な減速機としては、例えば、平歯車減速機等がある。平歯車は、回転軸に平行に歯を切った歯車で円筒面上に歯車が軸と平行になっている。平歯車減速機では、2つの歯車を噛み合わせることにより、駆動力の増加(又は減少)と回転速度の減少(又は増加)を行うことができ、ロボットの関節構造等にも利用されている。
【0003】
また、CVTは変速比を可変にするため、歯車の歯を設ける代わりに回転軸間に大きな押し付け力を加えて、摩擦力により駆動力を伝達するものである。CVTとしては、例えば、円すい状の円板を対向させた2組の伝達軸をベルトで結び、夫々の円板をスラスト方向に移動するとともに駆動力を伝達できるようにスプライン軸などで組み合わせ、円板の間隔を広げたり、狭めたりすることで、円板の間隔にあわせて有効な回転半径をそれぞれ変化させることにより無段階に変速を行うベルト式CVTや2つのテーパ回転軸を対向させ、その中間にローラを設けてこれらを接触させ、ローラを移動させることにより無段階に変速を行うもの等がある。
【0004】
しかしながら、平歯車等は、歯車の歯数比が減速比(変速比)となるため、減速比は一定の固定減速機となる。そのため、連続的に減速比を変えることはできない。また、CVTでは、摩擦力によって駆動力を伝達するので、小型化するには、駆動力を伝達する回転軸間に作用させる摩擦力を大きくする必要があるため、装置の小型化が困難である。従って、小型化が要求されるようなリハビリロボットや福祉ロボット等にCVTを利用するには、問題があった。
【0005】
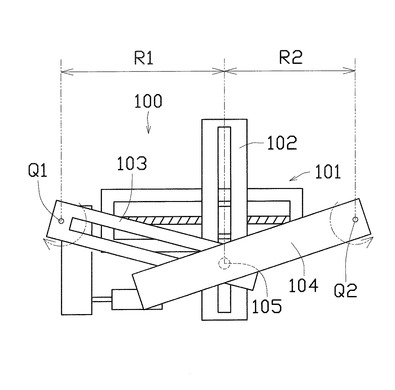
そこで、本発明者は、摩擦力に頼ることなく駆動力を伝達することができ、且つ、減速比を連続的に変化させることができる可変減速機を発明した(特許文献1参照)。この可変減速機100は、図9に示すように、移動手段(ボールネジ機構)101により移動部材102を駆動力が入力される第1の揺動リンク103の第1回転軸Q1と駆動力が出力される第2の揺動リンク104の第2回転軸Q2との間を移動させて、移動部材102から第1回転軸Q1までの距離R1と第2回転軸Q2までの距離R2との距離比を調節することにより減速比を可変にするものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−014145号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1では、第1回転軸Q1と、第2回転軸Q2と、移動部材102、第1の揺動リンク103、及び第2の揺動リンク104にそれぞれ連結されているポスト105と、がそれぞれ同一直線上に並ぶ基準位置においては、移動部材102から第1回転軸Q1までの距離R1と第2回転軸Q2までの距離R2との距離比が減速比(変速比)になるが、図9に示すように第1回転軸Q1に入力された駆動力により第1の揺動リンク103及び第2の揺動リンク104が回転して基準位置からずれると、回転半径は、それぞれR1、R2にならなくなるため減速比は正確な一定値にはならないという問題がある。
【0008】
本発明は、上記のような課題に鑑みてなされたものであって、摩擦力に頼ることなく変速比を無段階に変化させることができ、且つ、設定した変速比を一定にすることができる無段変速機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、請求項1記載の無段変速機は、外部からの入力により所定の直線方向に移動可能な第1ポスト部材が固定された入力部材と、前記第1ポスト部材が移動可能な直線と平行、且つ、前記第1ポスト部材の移動方向に対して逆向きに移動する第2ポスト部材が固定された出力部材と、前記直線方向に対して垂直な方向に移動可能な移動部材を有する移動手段と、前記移動部材に回転自在に支持され、且つ、前記第1ポスト部材及び前記第2ポスト部材の移動に伴って回転するように前記第1ポスト部材及び前記第2ポスト部材を夫々スライド可能に保持するスライド孔が形成された無段変速リンクと、を備え、前記移動手段により前記無段変速リンクの回転軸から前記第1ポスト部材が移動可能な直線までの距離と前記第2ポスト部材が移動可能な直線までの距離との距離比を調節することにより前記入力部材と前記出力部材の変速比を無段階に変化させることを特徴としている。
【0010】
請求項2記載の無段変速機では、前記入力部材は、外部から入力された回転駆動力により前記第1ポスト部材を前記直線方向に移動させ、前記出力部材は、前記移動手段により調整された前記距離比に応じた前記変速比で前記回転駆動力を伝達することを特徴としている。
【0011】
請求項3記載のロボット関節構造は、請求項1又は2記載の無段変速機を用いたロボット関節構造であって、駆動手段と、該駆動手段による駆動力により駆動する第1プーリと、前記無段変速機の出力部材から出力された駆動力により揺動する揺動リンクと、該揺動リンク上に固定され、前記第1プーリの駆動に伴ってワイヤを介して駆動する1対のプーリと、前記第1プーリの駆動及び/又は前記揺動リンクの揺動による前記1対のプーリの駆動に伴って前記ワイヤを介して駆動する第2プーリと、該第2プーリの駆動軸上に揺動可能に取り付けられる出力リンクと、を備えることを特徴としている。
【発明の効果】
【0012】
請求項1記載の無段変速機によれば、移動手段により無段変速リンクの回転軸から入力部材に固定された第1ポスト部材が移動可能な直線までの距離と出力部材が固定された第2ポスト部材が移動可能な直線までの距離との距離比を調整することにより、変速比を無段階に変化させることができるとともに、入力部材への入力を前記距離比を調整することにより設定した一定の変速比のまま出力部材に出力することができる。これにより、大きな摩擦力に頼ることなく変速比を無段階に変化させることができ、小型化を図ることができるので、リハビリロボットや福祉ロボット等のロボット関節構造等に有効に利用することができる。また、設定した変速比が一定となるので、変速比が重要な用途にも有効に利用することができる。
【0013】
請求項2記載の無段変速機によれば、無段階に変速比を変えることができるので、入力部材に入力された回転駆動力を所望の変速比によって出力部材に伝達することができる。
【0014】
請求項3記載のロボット関節構造によれば、駆動手段による動きと無段変速機側の変位との2つの動きの和を出力リンクに対して出力することができる。また、一方の無段変速機側では、無段変速リンクの大きさ等に応じて動ける範囲は有限であるが、もう一方の駆動手段により無限に回転できるので、ロボット関節の可動範囲を広くすることができる。また、このような構造は、比較的コンパクトに設計することができるので、小型化が要求されるリハビリロボットや福祉ロボット等のロボット関節構造として有効に利用することができる。
【図面の簡単な説明】
【0015】
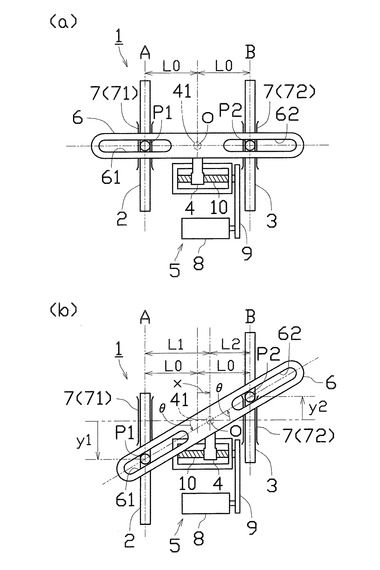
【図1】本発明の第1の実施形態に係る無段変速機の一例を示す概略平面図であって、(a)は無段変速リンクが基準位置にある状態を示しており、(b)は入力部材への入力により無段変速リンクが回転した場合の状態を示している。
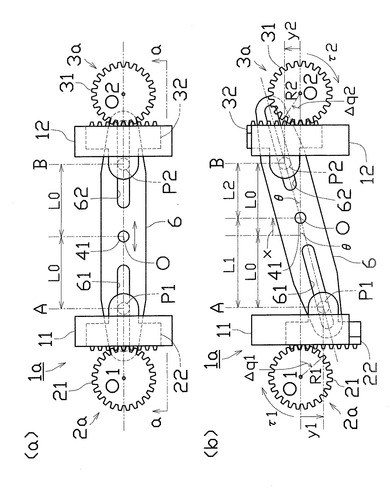
【図2】本発明の第2の実施形態に係る無段変速機の一例を示す概略平面図であって、
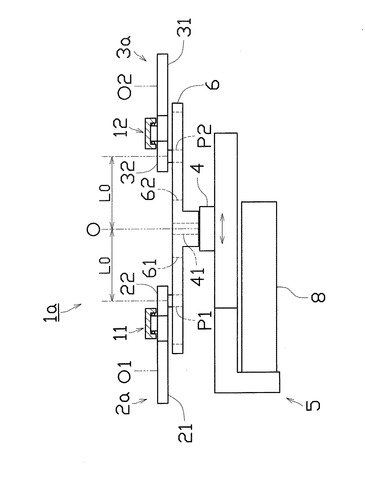
【図3】図2に示す無段変速機のa−a線断面図である。
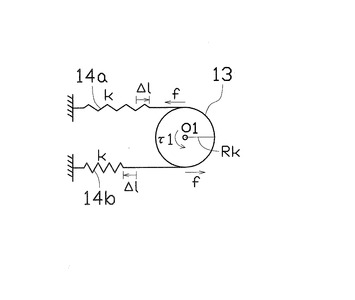
【図4】入力部材にバネの作用を付加する場合の一例について説明するための概略説明図である。
【図5】本発明の第3の実施形態に係る無段変速機の一例を示す概略平面図である。
【図6】本発明に係るロボット関節構造の一例を示す概略模式図である。
【図7】図6のロボット関節構造15における歯車の構成について説明するための概略説明図である。
【図8】本発明に係るロボット関節構造の他の一例を示す概略模式図である。
【図9】従来技術における可変減速機の一例を示す概略平面図である。
【発明を実施するための形態】
【0016】
以下に本発明の第1の実施形態に係る無段変速機1について、図面を参照しつつ説明する。本発明の第1の実施形態に係る無段変速機1は、図1に示すように、第1ポスト部材P1が固定された入力部材2と、第2ポスト部材P2が固定された出力部材3と、移動部材4を左右に直線移動させるための移動手段5と、移動部材4に回転自在に支持されている無段変速リンク6とを備えており、入力部材2への外部からの入力が無段変速リンク6を介して出力部材3へと出力されるものである。尚、この無段変速機1では、入力部材2の並進を変速させて出力部材3の並進として出力する。
【0017】
入力部材2は、長尺な棒状の部材からなるものであり、上面に上方へと突出するポスト部材P1が固定されている。この入力部材2は、外部からの入力によりリニアガイド7(71)によって案内されて所定の直線A上をスライド移動できるように構成されている。また、出力部材3は、入力部材2と同様に長尺な棒状の部材からなるものであり、上面に上方へと突出するポスト部材P2が固定されている。この出力部材3も入力部材2と同様にリニアガイド7(72)によって案内されて直線Aと平行な直線B上をスライド移動できるように構成されている。
【0018】
移動手段5は、移動部材4を直線Aと直線Bに対して垂直な方向に移動させるためのものである。図1に示すように、移動手段5は、例えばボールネジ機構により構成されており、駆動力を発生させる小型のモータ8と、該モータ8の駆動力を伝達するタイミングベルト9と、該タイミングベルト9から伝達される駆動力により回転するボールネジ10と、該ボールネジに螺合可能なナット構造を有する移動部材4とを備えている。ボールネジ10は、入力部材2と出力部材3の間で直線Aと直線Bに対して垂直な方向に設けられており、モータ8による駆動力がタイミングベルト9を介して伝達されて回転することにより、この回転に伴って、ボールネジ10に螺合されている移動部材4がボールネジ10に沿って移動する。尚、このボールネジ機構自体は、不図示の台座等に固定されている。また、本実施形態では、移動手段5として、モータ8の駆動力によりタイミングベル9を介してボールネジ10が回転することによりナット構造を有する移動部材4がボールネジ10に沿って移動するボールネジ機構を例にしているが、移動手段は、モータ8により直接ボールネジ10を回転させることにより移動部材4をボールネジ10に沿って移動可能に構成するようにしても良く、移動部材4の直線移動を可能にするものであれば特に限定されるものではない。また、モータ8に回転位置等を計測するためのエンコーダ(不図示)を取り付けたり、モータ8とタイミングベルト9の間にギアを組み込んだりするように適宜構成することも可能である。
【0019】
移動部材4は、ボールネジ10に螺合され、該ボールネジ10に沿って移動するものであり、移動部材4の上面には上方に突出するように支柱41が設けられている。この支柱41は、無段変速リンク6の中心で該無段変速リンク6を回転自在に支持するように取り付けられている。尚、本実施形態では、説明をし易くするために図1に示すように、支柱41をボールネジ10に螺合された位置からずれた位置で上方へと突出する例を図示しているが、支柱41は、ボールネジ10に螺合されている位置から上方に突出するように設けられるのが構造上好ましい。
【0020】
無段変速リンク6は、支柱41により回転軸O周りで回転自在に支持されており、移動部材4の移動に伴って、直線Aと直線Bに対して垂直な方向に移動可能である。また、無段変速リンク6の両側には、当該無段変速リンク6の回転に伴って第1ポスト部材P1及び第2ポスト部材P2を夫々スライド可能に保持するために無段変速リンク6の長尺方向に長く形成されたスライド孔61、62が夫々設けられている。
【0021】
以下、無段変速機1の動作について図1を参照しつつ説明する。まず、無段変速リンク6が基準位置にある場合は、図1(a)に示すように、回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離が共に等距離L0、つまり距離比が1:1で、且つ、第1ポスト部材P1、回転軸O、第2ポスト部材P2を結ぶ直線が直線A及び直線Bに対して垂直になっている。
【0022】
次に、この基準位置の状態から無段変速機1の変速比を変えるために、移動手段5により移動部材4を直線A及び直線Bに対して垂直な方向へ所望の距離分移動させることにより、無段変速リンク6の回転軸Oを移動する。図1(b)では、回転軸Oは、基準位置から直線B側へxだけ移動した場合を示している。この状態から入力部材2に対して、例えば、リニアアクチュエータ(不図示)等により外部から入力が行われ、図1(b)に示すように、第1ポスト部材P1が直線Aの下側向きにy1移動すると、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は回転軸Oを中心に回転角θ分だけ反時計回りに回転する。
【0023】
そして、この無段変速リンク6の回転に伴って、第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を第1ポスト部材P1の移動方向の逆方向にy2だけ移動する。つまり、図1(b)の状態では、第1ポスト部材P1がy1移動すると、無段変速リンク6を介して第2ポスト部材P2は、第1ポスト部材P1と逆方向にy2移動することになる。この第1ポスト部材P1の並進変位量y1及び第2ポスト部材P2の並進変位量y2は、夫々回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離L1、第2ポスト部材P2が移動可能な直線Bまでの距離L2、及び無段変速リンク6の回転変位量θを用いて、下記の数式(1)、(2)で表わされる。
【数1】

【数2】
【0024】
また、図1(b)に示すように、距離L1、L2は、夫々無段変速リンク6の基準位置における回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離である距離L0、及び基準位置からの回転軸Oの移動量xを用いて、下記の数式(3)、(4)で表わされる。
【数3】
【数4】
【0025】
また、第2ポスト部材P2の並進変位量y2は、数式(1)、(2)より下記の数式(5)で表わされる。但し、数式(5)におけるNLは並進減速比を表わすものである。つまり、この数式(5)に示されるように、回転軸Oから直線Aまでの距離L1と直線Bまでの距離L2との距離比が、そのまま入力部材2(第1ポスト部材P1)の並進変位量y1と出力部材3(第2ポスト部材P2)の並進変位量y2に現れてくることになり、入力部材2への入力が減速して出力部材3に現れる場合には、NLは1より大きくなり、増速して現れる場合には、NLは1より小さくなる。従って、図1(a)の状態においては、距離L1、L2は共に距離L0であり、並進減速比NLは1になるので、外部からの入力により入力部材2が並進した場合には、減速又は増速されることなく出力部材へと出力されることになる。
【数5】
【0026】
また、並進減速比NLは、数式(3)、(4)を用いて、数式(6)のように表わすことができる。つまり、数式(6)に示されるように並進減速比NLは、回転軸Oの移動量xの関数として表わされるので、並進減速比NLは、可変の減速比になっており、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることにより、変速比を無段階に変えることができる。また、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることによって変速比を設定すれば、その一定の変速比のまま入力部材2の並進を変速させて出力部材3の並進として出力することができる。
【数6】
【0027】
次に、本発明の第2の実施形態に係る無段変速機1aについて、図2及び図3を参照しつつ説明する。この無段変速機1aは、入力部材としてラック・アンド・ピニオン2aを用いて、例えば、モータ(不図示)等により外部から入力された回転駆動力を無段階に変速させて出力部材であるラック・アンド・ピニオン3aに伝達するものである。尚、第1の実施形態に係る無段変速機1と同様の構成等については、同一の符号を付し、その詳細な説明は省略する。
【0028】
入力側のラック・アンド・ピニオン2aは、図2及び図3に示すようにピニオン21と該ピニオン21の回転運動を直線運動として伝達するラック22からなるものである。ピニオン21は、モータ等により外部から入力された回転駆動力により回転軸O1を中心に回転する。ラック22は、ピニオン21の回転に伴って直線運動するようにクロスローラーテーブル11のベースに固定されている。また、ラック22は、歯が設けられている面と反対側の面の一部が張り出した形状をしており、その下面から下方に向かって突出するように第1ポール部材P1が固定されており、ラック22の直線運動に伴って、第1ポール部材P1が直線A上を移動するようになっている。
【0029】
出力側のラック・アンド・ピニオン3aも入力側のラック・アンド・ピニオン2aと同様にピニオン31とラック32からなるものであり、入力側のピニオン21に入力された回転駆動力が無段変速リンク6を介して第2ポスト部材P2が固定されているラック32を直線運動させることにより、回転軸O2を中心としてピニオン31を回転させる回転駆動力として伝達される。尚、ピニオン21及びピニオン31は、それぞれ回転軸O1及びO2を回転自在に支持する軸受(不図示)を介して土台(不図示)に固定されている。
【0030】
以下、無段変速機1aの動作について図2及び図3を参照しつつ説明する。無段変速機1aも無段変速機1と同様に無段変速リンク6が基準位置にある場合は、図2(a)に示すように、回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離が共に等距離L0で、且つ、第1ポスト部材P1、回転軸O、第2ポスト部材P2を結ぶ直線が直線A及び直線Bに対して垂直になっている。
【0031】
次に、この基準位置の状態から無段変速機1aの変速比を変えるために、移動手段5により移動部材4を図2(a)及び図3に示す矢印方向(直線A及び直線Bに対して垂直な方向)へ所望の距離分移動させることにより、無段変速リンク6の回転軸Oを移動する。図2(b)では、回転軸Oは、基準位置から直線B側へxだけ移動した場合を示している。この状態から入力側のピニオン21に対して、モータ等により外部から回転駆動力が入力され、図2(b)に示すように、ピニオン21が回転軸O1を中心として時計回りにΔq1だけ回転すると、ラック22に固定されている第1ポスト部材P1が直線Aの下向きにy1移動し、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は回転軸Oを中心に回転角θだけ反時計回りに回転する。
【0032】
そして、この無段変速リンク6の回転に伴って、ラック32に固定されている第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を第1ポスト部材P1の移動方向の逆方向にy2だけ移動することにより、ピニオン31が回転軸O2を中心として時計回りにΔq2だけ回転する。つまり、図2(b)の状態では、ピニオン21が回転軸O1を中心として時計回りにΔq1だけ回転すると、無段変速リンク6を介してピニオン31が回転軸O2を中心として時計回りにΔq2だけ回転することになる。このピニオン21の回転変位量Δq1は、ピニオン21の回転半径R1及び第1ポスト部材P1の並進変位量y1を用いて、下記の数式(7)で表され、ピニオン31の回転変位量Δq2は、ピニオン31の回転半径R2及び第2ポスト部材P2の並進変位量y2を用いて、下記の数式(8)で表される。
【数7】
【数8】
【0033】
また、数式(5),(7),(8)よりピニオン31の回転変位量Δq2は、下記の数式(9)で表される。但し、数式(9)におけるNは、回転減速比を表すものであり、数式(10)で定義される。この数式(10)で示されるように、回転減速比Nは、回転軸Oの移動量xの関数として表される可変の並進減速比NLに比例するものであるので、回転減速比Nも可変の減速比であり、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることにより、無段変速機1aの変速比を無段階に変えることができる。尚、数式(10)におけるR1、R2は、夫々ピニオン21とピニオン31の回転半径を表すものであるので、定数である。
【数9】
【数10】
【0034】
次に、無段変速機1aを用いた駆動力伝達機構としての利用例について図2〜4を参照しつつ説明する。図4に示すように、回転半径Rkのピニオン13に巻きばね14a,14bをプッシュ・プルとなるように繋ぎ、ピニオン13を無段変速機1aの入力側のピニオン21と同じ回転軸O1で回転自在になるように連結する。つまり、ピニオン21が回転軸O1を中心として回転すると、同軸で連結されているピニオン13も回転し、それに伴って、巻きばね14a,14bの一方が伸びた状態になり、もう一方が縮んだ状態になることにより、巻きばね14a,14bの力fが作用する構成になっている。尚、巻きばね14a,14bの一端は、不図示の土台に固定されている。また、図4では巻きばね14a,14bのばね定数kは同一になるように設定されている。
【0035】
この状態において、図2(b)に示すように、ピニオン21が時計回りにΔq1回転した際に、ピニオン13に繋がれている巻きばね14aがΔl伸び、巻きばね14bがΔl縮んだ場合、図4に示す力fはフックの法則により下記の数式(11)で表される。また、ピニオン13の回転変位量Δq1は、巻きばね14a,14bの並進変位量Δlと回転半径Rkを用いて、下記の数式(12)で表される。また、巻きばね14a,14bに作用する力fを足し合わせたものが、回転軸O1に伝わる回転トルクτ1を回転半径Rkで割ったものとなり、下記の数式(13)のように表される。
【数11】
【数12】
【数13】
【0036】
数式(11)〜(13)より、回転トルクτ1は、数式(14)のように表される。但し、数式(14)におけるK1は、入力側の回転軸O1周りの回転剛性であり、数式(15)で表される。つまり、数式(15)は、2つの巻きばね14a,14bを入力側に設けることにより、回転軸O1周りの回転剛性がK1になるということを示している。
【数14】
【数15】
【0037】
また、数式(9)で示されるように、入力側のピニオン21の回転軸O1周りの回転と出力側のピニオン31の回転軸O2周りの回転には変速の関係があるので、回転トルク同士の関係も変速比の関係で表され、回転軸O1に働く回転トルクτ1は、回転減速比Nと出力側の回転軸O2に働く回転トルクτ2を用いて、下記の数式(16)で表される。
【数16】
【0038】
そして、数式(9),(16)より、回転トルクτ2は、数式(17)で表される。但し、数式(17)におけるK2は、出力側の回転軸O2周りの回転剛性であり、数式(18)で表される。つまり、無段変速機1aの入力側の回転軸O1に図4に示すような巻きばね14a,14bを設けることにより、入力側の回転軸O1周りに所望の回転剛性K1を生じさせることができ、更に無段変速機1aを介することにより、数式(18)に示すように、出力側の回転軸O2周りの回転剛性として、回転軸O1周りの回転剛性K1に回転減速比Nの2乗倍の回転剛性K2を作り出すことが可能になる。また、回転減速比Nは、可変であるので、出力に現れる回転剛性K2も可変になる。
【数17】
【数18】
【0039】
従って、ばねの剛性を硬い状態と柔らかい状態等を状況に応じて使い分けたいような場合に、ばね自体を取り替えることなく、この無段変速機1aを組み合わせることにより、出力側の剛性K2を所望の値に設定することが可能になる。従って、例えば、数式(6)で示されるL2/L1の値を1/√10から√10まで変化させることができるように無段変速機1aを設計した場合には、巻きばね14a,14bの効果が1/10から10まで変わることになる。つまり、ばねの効果を100倍変えることが可能になるので、力を加えてもほとんど変位がない硬い状態から同等の力で容易に動くような柔らかい状態を同じばねを利用して作り出すことができる。
【0040】
また、無段変速機1aを用いた駆動力伝達機構として、図4に示すような巻きばね14a,14bを設ける代わりに、例えば、ピニオン21と噛み合う歯車(不図示)を介して、粘性特性を付加するためのロータリーダンパ(不図示)等を取付けるように構成しても良い。ロータリーダンパとしては、例えば、オイルの粘性抵抗により発生する制動力を利用した回転系のダンパーやオイルの圧力を利用した揺動ダンパー等を利用することが可能である。ロータリーダンパの制動トルクは、回転速度に応じて、発生するトルクの値を変化するものであり、回転速度が上がるとトルクも上がり、回転速度が下がるとトルクも下がる特徴を有している。従って、ロータリーダンパを入力側に設けることにより、回転軸O2側に粘性特性を付加した出力をすることも可能になる。
【0041】
次に、本発明の第3の実施形態に係る無段変速機1bについて、図5を参照しつつ説明する。この無段変速機1bは、入力側の回転軸O1と同一直線上に出力側の回転軸を設けたものである。尚、無段変速機1、1aと同様の構成等については、同一の符号を付し、その詳細な説明は省略する。
【0042】
図5に示すように、無段変速機1bの入力部材2bは、モータ等により外部から入力される回転駆動力により回転軸O1を中心として回転するピニオン23と、該ピニオン23の回転に伴って、回転軸O3を中心として回転するピニオン24と、該ピニオン24の回転運動を直線運動として伝達するラック22とからなるものである。また、出力部材3bは、無段変速リンク6の回転を介して第2ポスト部材P2とともに直線Aと平行な直線B上を直線移動するラック32と、該ラック32の直線移動に伴って回転軸O4を中心として回転するピニオン34と、該ピニオン34の回転に伴って入力側のピニオン23の回転軸O1と同一直線上にある回転軸を中心に回転するピニオン33とからなるものである。尚、図5では、ピニオン23、24、33、34、及びラック22、32の歯は省略して図示している。
【0043】
このように構成される無段変速機1bでは、図5に示すように、入力側のピニオン23にモータ等により外部から時計回りの回転駆動力が入力され、ピニオン23が回転軸O1回りで矢印方向(時計回り)に回転すると、ピニオン24は、矢印方向(反時計回り)に回転し、ラック22及びラック22に固定されている第1ポスト部材P1が、直線A上を矢印方向(下向き)に移動する。そして、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は、回転軸Oを中心に矢印方向(反時計回り)に回転する。また、この無段変速リンク6の回転に伴って、ラック32に固定されている第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を矢印方向(上向き)に移動することにより、ピニオン34は回転軸O4を中心として矢印方向(反時計回り)に回転する。そして、このピニオン34の回転に伴って、入力側の回転軸O1と同一直線上に設けられている出力軸に連結されているピニオン33が矢印方向(時計回り)に回転することになる。尚、本実施形態では、入力部材2bのピニオン23とラック22の間にピニオン24を設けているが、このピニオン24を省いて、ピニオン23とラック22でラック・アンド・ピニオンを構成するようにしても良い。出力部材3bについても、同様にピニオン34を省いて、ピニオン33とラック32でラック・アンド・ピニオンを構成するようにしても良い。また、この無段変速機1bも無段変速機1,1aと同様に移動手段5により回転軸Oの位置を移動させることにより、変速比を無段階に変化させることができる。
【0044】
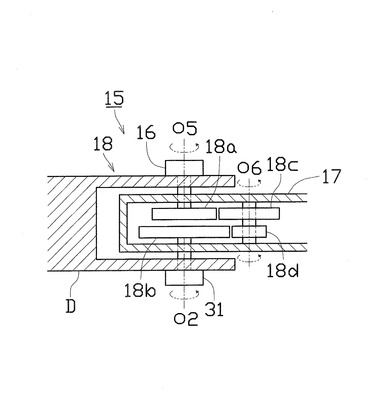
次に、本発明に係る無段変速機1a等を利用した場合のロボット関節構造15の一例について図6及び図7を参照しつつ説明する。図6に示すロボット関節構造15は、冗長駆動関節としての実施例を示すものであり、台座Dに固定されたモータ16からの駆動力と、図2に示すような外部からモータ等により入力された駆動力を無段変速機1aを介して出力部材3aのピニオン31から出力する駆動力とを回転軸O5、O2周りで回転する出力リンク17に対して伝達する2入力1出力の機構である。尚、回転軸O5とO2は、それぞれ同一直線上に位置するものである。
【0045】
このロボット関節構造15は、図6に示すように、2入力1出力を行うための動作加算部18と、該動作加算部18の上側に設けられるモータ16と、動作加算部18の下側に上述の無段変速機1aに図4に示すような巻きばね14a、14bを付加した駆動力伝達機構とを備えるものである。尚、図6では、説明を簡易にするために、無段変速機1aの出力部材3aにおけるピニオン31のみ図示している。
【0046】
動作加算部18は、図6、7に示すように、モータ16の駆動力により回転する第1歯車18aと、ピニオン31から出力された駆動力により回転する第2歯車18bと、第1歯車18aと噛み合う第3歯車18cと、第2歯車18bと噛み合う第4歯車18dとを備えており、この夫々の歯車18a〜18dは、出力リンク17の内部に納まるように構成されている。
【0047】
第1歯車18aは、モータ16及び出力リンク17と回転軸O5を介して連結されており、モータ16からの駆動力により、第1歯車18a及び出力リンク17は、回転軸O5周りで回転する。第2歯車18bは、ピニオン31及び出力リンク17と回転軸O2を介して連結されており、ピニオン31からの駆動力により、第2歯車18b及び出力17は、回転軸O2周りで回転する。第3歯車18cは、第1歯車18aと噛み合っており、第1歯車18aの回転に伴って回転する。第4歯車18dは、第2歯車18bと噛み合っており、第2歯車18bの回転に伴って回転する。また、第3歯車18c及び第4歯車18dは、それぞれ同一回転軸O6で連結されており、それぞれこの同一回転軸O6周りを同じ回転角qIで回転する。尚、回転軸O6の両端は、出力リンクに設けられた軸受(不図示)により回転自在に支持されている。
【0048】
このロボット関節構造15の動作を示す基礎式は、数式(19)のように表される。尚、R1は第1歯車18aの半径、qA1は第1歯車18aの回転軸O5周りの回転角、R2は第2歯車18bの半径、qA2は第2歯車18bの回転軸O2周りの回転角、qは出力リンク17の回転軸O2,O5周りの回転角(関節角)、qIは第3歯車18c及び第4歯車18dの回転軸O6周りの回転角をそれぞれ表している。また、r1及びr2は、それぞれ数式(20)で表されるものであり、RI1は第3歯車18cの半径、RI2は第4歯車18dの半径を表している。また、数式(20)では、第1歯車18aの半径R1と第3歯車18cの半径RI1が同じ値であり、第2歯車18bの半径R2が第4歯車18dの半径RI2の2倍の値である場合を示している。
【数19】
【数20】
【0049】
この場合、数式(19)は、数式(21)のように表される。この数式(21)の出力のみについて整理すると、出力リンク17の回転角変位Δqに関して、数式(22)が成り立つ。この数式(22)は、ピニオン31が固定された状態で第1歯車18aがΔqA1回転すると、出力リンク17は第1歯車18aと逆向きにΔqA1回転し、第1歯車18aが固定された状態で、ピニオン31がΔqA2回転すると、出力リンク17はピニオン31と同じ向きにΔqA2の2倍回転することを表している。また、このとき、駆動力に関しても数式(23)が成立する。尚、τA1は第1歯車18aの駆動力、τA2は第2歯車18bの駆動力、τは出力リンク17の駆動力をそれぞれ表している。
【数21】
【数22】
【数23】
【0050】
従って、例えば、第1歯車18aの回転変位ΔqA1=−1〔rad〕で、第2歯車18bの回転変位ΔqA2=0の場合には、数式(22)より出力リンク17の回転変位Δq=1〔rad〕となる。また、第1歯車18aの回転変位ΔqA1=0で、第2歯車18bの回転変位ΔqA2=0.5〔rad〕の場合には、出力リンク17の回転変位Δq=1〔rad〕となる。また、駆動力に関しては、例えば、τ=25〔Nm〕の場合には、数式(23)よりτA1=−25〔Nm〕、τA2=50〔Nm〕となる。また、τA1=0又はτA2=0の場合には、τ=0となる。尚、ここでは数式(20)に示すように、第1歯車18aの半径R1と第3歯車18cの半径RI1が同じ値であり、第2歯車18bの半径R2が第4歯車18dの半径RI2の2倍の値である場合の例に基づいて説明しているが、R1,RI1,R2,RI2はこのような値に限定されるものではなく、適宜用途に応じて夫々の半径の値を設定しても良い。
【0051】
次に、本発明に係る無段変速機1a等を利用した他のロボット関節構造15a一例について図8を参照しつつ説明する。図8に示すロボット関節構造15aは、冗長駆動関節としての実施例を示すものであり、台座Dに固定されたモータ16からの駆動力と、図2に示すような外部からモータ等により入力された駆動力を無段変速機1aを介して出力部材3aのピニオン31から出力する駆動力とを回転軸O7周りで回転する出力リンク17に対して伝達できる2入力1出力の機構である。
【0052】
このロボット関節構造15aは、図8に示すように、2入力1出力を行うための動作加算部19と、該動作加算部19の上側に設けられるモータ16と、動作加算部19の下側に上述の無段変速機1aに図4に示すような巻きばね14a、14bを付加した駆動力伝達機構とを備えるものである。尚、図8でも、説明を簡易にするために、無段変速機1aの出力部材3aにおけるピニオン31のみ図示している。
【0053】
動作加算部19は、図8に示すように、モータ16の駆動力により回転軸O8周りを回転する第1プーリ19aと、ピニオン31から出力された駆動力により回転軸O2周りを揺動する揺動リンク19bと、該揺動リンク19bに固定されている2本の棒部材19cに夫々取り付けられている1対のプーリ19d、19eと、出力リンク17の下側で該出力リンク17と同軸O7で連結される第2プーリ19fと、夫々のプーリ19a、19d、19e、19fに巻回されるワイヤWとを備えている。この動作加算部19では、第2プーリ19fが回転駆動することにより、出力リンク17にその駆動力が伝達されるようになっており、第2プーリ19fは、第1プーリ19aの駆動及び/又は揺動リンク19bの揺動運動によって1対のプーリ19d、19eが駆動することによってワイヤWを介して駆動することになる。尚、図8では、ピニオン31から回転軸O2を介して揺動リンク19bに直接駆動力が伝えられ、該揺動リンク19bは、回転軸O2を中心として揺動するように構成されているが、ピニオン31に別途歯車(不図示)を介して揺動リンク19bに駆動力を伝達するように構成しても良い。
【0054】
また、このロボット関節構造15aにおける出力リンク17の角速度ωJは、第1プーリ19aの半径をRM、第2プーリ19fの半径をRJとした場合、下記の数式(24)のように表される。但し、ωMは第1プーリ19aの回転軸O8周りの角速度、ωAは揺動リンク19bの回転軸O2周りの角速度である。
【数24】
【0055】
従って、例えば、第1プーリ19aの半径RMと第2プーリ19fの半径RJが同じ半径である場合には、α1=1となる。この場合、数式(24)において、α1=1を代入すると、数式(25)のように表される。この数式(25)は、ωMのある大きさの動きが、ωJに逆向きの同じ大きさの動きになることを表しており、ωAのある大きさの動きが、ωJに2倍の大きさの同じ向きの動きになることを表している。
【数25】
【0056】
従って、モータ16が動きにくい場合でも、図8に示すような動作加算部19を組み合わせることにより、バックドライバビリティを改善することができる。つまり、出力リンク17に力を加えた時に、変位や加速度を生じやすくすることができるので、リハビリ等に用いるロボット関節構造として有効である。また、このようなロボット関節構造15aにより、無段変速機1a側では、無段変速リンク6の大きさ等に応じて動ける範囲は制限されるが、もう一方のモータ16により制限なく回転できるので、ロボット関節の可動範囲を広くすることができる。尚、ロボット関節構造15、15aにおけるそれぞれの動作加算部18,19の構造は、本発明に係る無段変速機1a以外の無段変速機等と組み合わせることも当然可能である。
【0057】
また、本実施形態に係る無段変速機1,1a、1bでは、入力側の並進運動を変速比を変えて出力側に並進運動として伝達する構造、及び入力側の回転運動を変速比を変えて出力側に回転運動として伝達する例について説明したが、入力側を無段変速機1のような構造にし、出力側を無段変速機1a、1bのように駆動力を出力するような構造にすることにより、並進運動を回転運動として伝達する構造や、逆に回転運動を並進運動として伝達する構造に設計することは適宜可能である。
【0058】
また、本発明の実施の形態は上述の形態に限るものではなく、本発明の思想の範囲を逸脱しない範囲で適宜変更することができる。
【産業上の利用可能性】
【0059】
本発明に係る無段変速機は、ロボットの関節構造を構成するための機構として有効に利用することができる。また、本発明に係る無段変速機を利用したロボット関節構造は、小型化を図ることができるので、リハビリロボットや福祉ロボット等のロボット関節構造として有効に利用することができる。
【符号の説明】
【0060】
1、1a、1b 無段変速機
2、2a、2b 入力部材
3、3a、3b 出力部材
4 移動部材
5 移動手段
6 無段変速リンク
61、62 スライド孔
15、15a ロボット関節構造
16 モータ(駆動手段)
17 出力リンク
19a 第1プーリ
19d、19e 1対のプーリ
19f 第2プーリ
19b 揺動リンク
O 回転軸
P1 第1ポール部材
P2 第2ポール部材
【技術分野】
【0001】
本発明は、摩擦力に頼ることなく変速比を無段階に変化させることができる無段変速機及びその無段変速機を用いたロボット関節構造に関する。
【背景技術】
【0002】
従来から一般的な減速機や変速機としては、歯車を利用したものや自動車等の駆動力の伝達に利用されているCVT(Continuously Variable
Transmission:連続可変変速機)等が知られている。歯車を利用した一般的な減速機としては、例えば、平歯車減速機等がある。平歯車は、回転軸に平行に歯を切った歯車で円筒面上に歯車が軸と平行になっている。平歯車減速機では、2つの歯車を噛み合わせることにより、駆動力の増加(又は減少)と回転速度の減少(又は増加)を行うことができ、ロボットの関節構造等にも利用されている。
【0003】
また、CVTは変速比を可変にするため、歯車の歯を設ける代わりに回転軸間に大きな押し付け力を加えて、摩擦力により駆動力を伝達するものである。CVTとしては、例えば、円すい状の円板を対向させた2組の伝達軸をベルトで結び、夫々の円板をスラスト方向に移動するとともに駆動力を伝達できるようにスプライン軸などで組み合わせ、円板の間隔を広げたり、狭めたりすることで、円板の間隔にあわせて有効な回転半径をそれぞれ変化させることにより無段階に変速を行うベルト式CVTや2つのテーパ回転軸を対向させ、その中間にローラを設けてこれらを接触させ、ローラを移動させることにより無段階に変速を行うもの等がある。
【0004】
しかしながら、平歯車等は、歯車の歯数比が減速比(変速比)となるため、減速比は一定の固定減速機となる。そのため、連続的に減速比を変えることはできない。また、CVTでは、摩擦力によって駆動力を伝達するので、小型化するには、駆動力を伝達する回転軸間に作用させる摩擦力を大きくする必要があるため、装置の小型化が困難である。従って、小型化が要求されるようなリハビリロボットや福祉ロボット等にCVTを利用するには、問題があった。
【0005】
そこで、本発明者は、摩擦力に頼ることなく駆動力を伝達することができ、且つ、減速比を連続的に変化させることができる可変減速機を発明した(特許文献1参照)。この可変減速機100は、図9に示すように、移動手段(ボールネジ機構)101により移動部材102を駆動力が入力される第1の揺動リンク103の第1回転軸Q1と駆動力が出力される第2の揺動リンク104の第2回転軸Q2との間を移動させて、移動部材102から第1回転軸Q1までの距離R1と第2回転軸Q2までの距離R2との距離比を調節することにより減速比を可変にするものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−014145号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1では、第1回転軸Q1と、第2回転軸Q2と、移動部材102、第1の揺動リンク103、及び第2の揺動リンク104にそれぞれ連結されているポスト105と、がそれぞれ同一直線上に並ぶ基準位置においては、移動部材102から第1回転軸Q1までの距離R1と第2回転軸Q2までの距離R2との距離比が減速比(変速比)になるが、図9に示すように第1回転軸Q1に入力された駆動力により第1の揺動リンク103及び第2の揺動リンク104が回転して基準位置からずれると、回転半径は、それぞれR1、R2にならなくなるため減速比は正確な一定値にはならないという問題がある。
【0008】
本発明は、上記のような課題に鑑みてなされたものであって、摩擦力に頼ることなく変速比を無段階に変化させることができ、且つ、設定した変速比を一定にすることができる無段変速機を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、請求項1記載の無段変速機は、外部からの入力により所定の直線方向に移動可能な第1ポスト部材が固定された入力部材と、前記第1ポスト部材が移動可能な直線と平行、且つ、前記第1ポスト部材の移動方向に対して逆向きに移動する第2ポスト部材が固定された出力部材と、前記直線方向に対して垂直な方向に移動可能な移動部材を有する移動手段と、前記移動部材に回転自在に支持され、且つ、前記第1ポスト部材及び前記第2ポスト部材の移動に伴って回転するように前記第1ポスト部材及び前記第2ポスト部材を夫々スライド可能に保持するスライド孔が形成された無段変速リンクと、を備え、前記移動手段により前記無段変速リンクの回転軸から前記第1ポスト部材が移動可能な直線までの距離と前記第2ポスト部材が移動可能な直線までの距離との距離比を調節することにより前記入力部材と前記出力部材の変速比を無段階に変化させることを特徴としている。
【0010】
請求項2記載の無段変速機では、前記入力部材は、外部から入力された回転駆動力により前記第1ポスト部材を前記直線方向に移動させ、前記出力部材は、前記移動手段により調整された前記距離比に応じた前記変速比で前記回転駆動力を伝達することを特徴としている。
【0011】
請求項3記載のロボット関節構造は、請求項1又は2記載の無段変速機を用いたロボット関節構造であって、駆動手段と、該駆動手段による駆動力により駆動する第1プーリと、前記無段変速機の出力部材から出力された駆動力により揺動する揺動リンクと、該揺動リンク上に固定され、前記第1プーリの駆動に伴ってワイヤを介して駆動する1対のプーリと、前記第1プーリの駆動及び/又は前記揺動リンクの揺動による前記1対のプーリの駆動に伴って前記ワイヤを介して駆動する第2プーリと、該第2プーリの駆動軸上に揺動可能に取り付けられる出力リンクと、を備えることを特徴としている。
【発明の効果】
【0012】
請求項1記載の無段変速機によれば、移動手段により無段変速リンクの回転軸から入力部材に固定された第1ポスト部材が移動可能な直線までの距離と出力部材が固定された第2ポスト部材が移動可能な直線までの距離との距離比を調整することにより、変速比を無段階に変化させることができるとともに、入力部材への入力を前記距離比を調整することにより設定した一定の変速比のまま出力部材に出力することができる。これにより、大きな摩擦力に頼ることなく変速比を無段階に変化させることができ、小型化を図ることができるので、リハビリロボットや福祉ロボット等のロボット関節構造等に有効に利用することができる。また、設定した変速比が一定となるので、変速比が重要な用途にも有効に利用することができる。
【0013】
請求項2記載の無段変速機によれば、無段階に変速比を変えることができるので、入力部材に入力された回転駆動力を所望の変速比によって出力部材に伝達することができる。
【0014】
請求項3記載のロボット関節構造によれば、駆動手段による動きと無段変速機側の変位との2つの動きの和を出力リンクに対して出力することができる。また、一方の無段変速機側では、無段変速リンクの大きさ等に応じて動ける範囲は有限であるが、もう一方の駆動手段により無限に回転できるので、ロボット関節の可動範囲を広くすることができる。また、このような構造は、比較的コンパクトに設計することができるので、小型化が要求されるリハビリロボットや福祉ロボット等のロボット関節構造として有効に利用することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施形態に係る無段変速機の一例を示す概略平面図であって、(a)は無段変速リンクが基準位置にある状態を示しており、(b)は入力部材への入力により無段変速リンクが回転した場合の状態を示している。
【図2】本発明の第2の実施形態に係る無段変速機の一例を示す概略平面図であって、
【図3】図2に示す無段変速機のa−a線断面図である。
【図4】入力部材にバネの作用を付加する場合の一例について説明するための概略説明図である。
【図5】本発明の第3の実施形態に係る無段変速機の一例を示す概略平面図である。
【図6】本発明に係るロボット関節構造の一例を示す概略模式図である。
【図7】図6のロボット関節構造15における歯車の構成について説明するための概略説明図である。
【図8】本発明に係るロボット関節構造の他の一例を示す概略模式図である。
【図9】従来技術における可変減速機の一例を示す概略平面図である。
【発明を実施するための形態】
【0016】
以下に本発明の第1の実施形態に係る無段変速機1について、図面を参照しつつ説明する。本発明の第1の実施形態に係る無段変速機1は、図1に示すように、第1ポスト部材P1が固定された入力部材2と、第2ポスト部材P2が固定された出力部材3と、移動部材4を左右に直線移動させるための移動手段5と、移動部材4に回転自在に支持されている無段変速リンク6とを備えており、入力部材2への外部からの入力が無段変速リンク6を介して出力部材3へと出力されるものである。尚、この無段変速機1では、入力部材2の並進を変速させて出力部材3の並進として出力する。
【0017】
入力部材2は、長尺な棒状の部材からなるものであり、上面に上方へと突出するポスト部材P1が固定されている。この入力部材2は、外部からの入力によりリニアガイド7(71)によって案内されて所定の直線A上をスライド移動できるように構成されている。また、出力部材3は、入力部材2と同様に長尺な棒状の部材からなるものであり、上面に上方へと突出するポスト部材P2が固定されている。この出力部材3も入力部材2と同様にリニアガイド7(72)によって案内されて直線Aと平行な直線B上をスライド移動できるように構成されている。
【0018】
移動手段5は、移動部材4を直線Aと直線Bに対して垂直な方向に移動させるためのものである。図1に示すように、移動手段5は、例えばボールネジ機構により構成されており、駆動力を発生させる小型のモータ8と、該モータ8の駆動力を伝達するタイミングベルト9と、該タイミングベルト9から伝達される駆動力により回転するボールネジ10と、該ボールネジに螺合可能なナット構造を有する移動部材4とを備えている。ボールネジ10は、入力部材2と出力部材3の間で直線Aと直線Bに対して垂直な方向に設けられており、モータ8による駆動力がタイミングベルト9を介して伝達されて回転することにより、この回転に伴って、ボールネジ10に螺合されている移動部材4がボールネジ10に沿って移動する。尚、このボールネジ機構自体は、不図示の台座等に固定されている。また、本実施形態では、移動手段5として、モータ8の駆動力によりタイミングベル9を介してボールネジ10が回転することによりナット構造を有する移動部材4がボールネジ10に沿って移動するボールネジ機構を例にしているが、移動手段は、モータ8により直接ボールネジ10を回転させることにより移動部材4をボールネジ10に沿って移動可能に構成するようにしても良く、移動部材4の直線移動を可能にするものであれば特に限定されるものではない。また、モータ8に回転位置等を計測するためのエンコーダ(不図示)を取り付けたり、モータ8とタイミングベルト9の間にギアを組み込んだりするように適宜構成することも可能である。
【0019】
移動部材4は、ボールネジ10に螺合され、該ボールネジ10に沿って移動するものであり、移動部材4の上面には上方に突出するように支柱41が設けられている。この支柱41は、無段変速リンク6の中心で該無段変速リンク6を回転自在に支持するように取り付けられている。尚、本実施形態では、説明をし易くするために図1に示すように、支柱41をボールネジ10に螺合された位置からずれた位置で上方へと突出する例を図示しているが、支柱41は、ボールネジ10に螺合されている位置から上方に突出するように設けられるのが構造上好ましい。
【0020】
無段変速リンク6は、支柱41により回転軸O周りで回転自在に支持されており、移動部材4の移動に伴って、直線Aと直線Bに対して垂直な方向に移動可能である。また、無段変速リンク6の両側には、当該無段変速リンク6の回転に伴って第1ポスト部材P1及び第2ポスト部材P2を夫々スライド可能に保持するために無段変速リンク6の長尺方向に長く形成されたスライド孔61、62が夫々設けられている。
【0021】
以下、無段変速機1の動作について図1を参照しつつ説明する。まず、無段変速リンク6が基準位置にある場合は、図1(a)に示すように、回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離が共に等距離L0、つまり距離比が1:1で、且つ、第1ポスト部材P1、回転軸O、第2ポスト部材P2を結ぶ直線が直線A及び直線Bに対して垂直になっている。
【0022】
次に、この基準位置の状態から無段変速機1の変速比を変えるために、移動手段5により移動部材4を直線A及び直線Bに対して垂直な方向へ所望の距離分移動させることにより、無段変速リンク6の回転軸Oを移動する。図1(b)では、回転軸Oは、基準位置から直線B側へxだけ移動した場合を示している。この状態から入力部材2に対して、例えば、リニアアクチュエータ(不図示)等により外部から入力が行われ、図1(b)に示すように、第1ポスト部材P1が直線Aの下側向きにy1移動すると、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は回転軸Oを中心に回転角θ分だけ反時計回りに回転する。
【0023】
そして、この無段変速リンク6の回転に伴って、第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を第1ポスト部材P1の移動方向の逆方向にy2だけ移動する。つまり、図1(b)の状態では、第1ポスト部材P1がy1移動すると、無段変速リンク6を介して第2ポスト部材P2は、第1ポスト部材P1と逆方向にy2移動することになる。この第1ポスト部材P1の並進変位量y1及び第2ポスト部材P2の並進変位量y2は、夫々回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離L1、第2ポスト部材P2が移動可能な直線Bまでの距離L2、及び無段変速リンク6の回転変位量θを用いて、下記の数式(1)、(2)で表わされる。
【数1】
【数2】
【0024】
また、図1(b)に示すように、距離L1、L2は、夫々無段変速リンク6の基準位置における回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離である距離L0、及び基準位置からの回転軸Oの移動量xを用いて、下記の数式(3)、(4)で表わされる。
【数3】
【数4】
【0025】
また、第2ポスト部材P2の並進変位量y2は、数式(1)、(2)より下記の数式(5)で表わされる。但し、数式(5)におけるNLは並進減速比を表わすものである。つまり、この数式(5)に示されるように、回転軸Oから直線Aまでの距離L1と直線Bまでの距離L2との距離比が、そのまま入力部材2(第1ポスト部材P1)の並進変位量y1と出力部材3(第2ポスト部材P2)の並進変位量y2に現れてくることになり、入力部材2への入力が減速して出力部材3に現れる場合には、NLは1より大きくなり、増速して現れる場合には、NLは1より小さくなる。従って、図1(a)の状態においては、距離L1、L2は共に距離L0であり、並進減速比NLは1になるので、外部からの入力により入力部材2が並進した場合には、減速又は増速されることなく出力部材へと出力されることになる。
【数5】
【0026】
また、並進減速比NLは、数式(3)、(4)を用いて、数式(6)のように表わすことができる。つまり、数式(6)に示されるように並進減速比NLは、回転軸Oの移動量xの関数として表わされるので、並進減速比NLは、可変の減速比になっており、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることにより、変速比を無段階に変えることができる。また、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることによって変速比を設定すれば、その一定の変速比のまま入力部材2の並進を変速させて出力部材3の並進として出力することができる。
【数6】
【0027】
次に、本発明の第2の実施形態に係る無段変速機1aについて、図2及び図3を参照しつつ説明する。この無段変速機1aは、入力部材としてラック・アンド・ピニオン2aを用いて、例えば、モータ(不図示)等により外部から入力された回転駆動力を無段階に変速させて出力部材であるラック・アンド・ピニオン3aに伝達するものである。尚、第1の実施形態に係る無段変速機1と同様の構成等については、同一の符号を付し、その詳細な説明は省略する。
【0028】
入力側のラック・アンド・ピニオン2aは、図2及び図3に示すようにピニオン21と該ピニオン21の回転運動を直線運動として伝達するラック22からなるものである。ピニオン21は、モータ等により外部から入力された回転駆動力により回転軸O1を中心に回転する。ラック22は、ピニオン21の回転に伴って直線運動するようにクロスローラーテーブル11のベースに固定されている。また、ラック22は、歯が設けられている面と反対側の面の一部が張り出した形状をしており、その下面から下方に向かって突出するように第1ポール部材P1が固定されており、ラック22の直線運動に伴って、第1ポール部材P1が直線A上を移動するようになっている。
【0029】
出力側のラック・アンド・ピニオン3aも入力側のラック・アンド・ピニオン2aと同様にピニオン31とラック32からなるものであり、入力側のピニオン21に入力された回転駆動力が無段変速リンク6を介して第2ポスト部材P2が固定されているラック32を直線運動させることにより、回転軸O2を中心としてピニオン31を回転させる回転駆動力として伝達される。尚、ピニオン21及びピニオン31は、それぞれ回転軸O1及びO2を回転自在に支持する軸受(不図示)を介して土台(不図示)に固定されている。
【0030】
以下、無段変速機1aの動作について図2及び図3を参照しつつ説明する。無段変速機1aも無段変速機1と同様に無段変速リンク6が基準位置にある場合は、図2(a)に示すように、回転軸Oから第1ポスト部材P1が移動可能な直線Aまでの距離と第2ポスト部材P2が移動可能な直線Bまでの距離が共に等距離L0で、且つ、第1ポスト部材P1、回転軸O、第2ポスト部材P2を結ぶ直線が直線A及び直線Bに対して垂直になっている。
【0031】
次に、この基準位置の状態から無段変速機1aの変速比を変えるために、移動手段5により移動部材4を図2(a)及び図3に示す矢印方向(直線A及び直線Bに対して垂直な方向)へ所望の距離分移動させることにより、無段変速リンク6の回転軸Oを移動する。図2(b)では、回転軸Oは、基準位置から直線B側へxだけ移動した場合を示している。この状態から入力側のピニオン21に対して、モータ等により外部から回転駆動力が入力され、図2(b)に示すように、ピニオン21が回転軸O1を中心として時計回りにΔq1だけ回転すると、ラック22に固定されている第1ポスト部材P1が直線Aの下向きにy1移動し、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は回転軸Oを中心に回転角θだけ反時計回りに回転する。
【0032】
そして、この無段変速リンク6の回転に伴って、ラック32に固定されている第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を第1ポスト部材P1の移動方向の逆方向にy2だけ移動することにより、ピニオン31が回転軸O2を中心として時計回りにΔq2だけ回転する。つまり、図2(b)の状態では、ピニオン21が回転軸O1を中心として時計回りにΔq1だけ回転すると、無段変速リンク6を介してピニオン31が回転軸O2を中心として時計回りにΔq2だけ回転することになる。このピニオン21の回転変位量Δq1は、ピニオン21の回転半径R1及び第1ポスト部材P1の並進変位量y1を用いて、下記の数式(7)で表され、ピニオン31の回転変位量Δq2は、ピニオン31の回転半径R2及び第2ポスト部材P2の並進変位量y2を用いて、下記の数式(8)で表される。
【数7】
【数8】
【0033】
また、数式(5),(7),(8)よりピニオン31の回転変位量Δq2は、下記の数式(9)で表される。但し、数式(9)におけるNは、回転減速比を表すものであり、数式(10)で定義される。この数式(10)で示されるように、回転減速比Nは、回転軸Oの移動量xの関数として表される可変の並進減速比NLに比例するものであるので、回転減速比Nも可変の減速比であり、移動手段5により無段変速リンク6の回転軸Oの位置を移動させることにより、無段変速機1aの変速比を無段階に変えることができる。尚、数式(10)におけるR1、R2は、夫々ピニオン21とピニオン31の回転半径を表すものであるので、定数である。
【数9】
【数10】
【0034】
次に、無段変速機1aを用いた駆動力伝達機構としての利用例について図2〜4を参照しつつ説明する。図4に示すように、回転半径Rkのピニオン13に巻きばね14a,14bをプッシュ・プルとなるように繋ぎ、ピニオン13を無段変速機1aの入力側のピニオン21と同じ回転軸O1で回転自在になるように連結する。つまり、ピニオン21が回転軸O1を中心として回転すると、同軸で連結されているピニオン13も回転し、それに伴って、巻きばね14a,14bの一方が伸びた状態になり、もう一方が縮んだ状態になることにより、巻きばね14a,14bの力fが作用する構成になっている。尚、巻きばね14a,14bの一端は、不図示の土台に固定されている。また、図4では巻きばね14a,14bのばね定数kは同一になるように設定されている。
【0035】
この状態において、図2(b)に示すように、ピニオン21が時計回りにΔq1回転した際に、ピニオン13に繋がれている巻きばね14aがΔl伸び、巻きばね14bがΔl縮んだ場合、図4に示す力fはフックの法則により下記の数式(11)で表される。また、ピニオン13の回転変位量Δq1は、巻きばね14a,14bの並進変位量Δlと回転半径Rkを用いて、下記の数式(12)で表される。また、巻きばね14a,14bに作用する力fを足し合わせたものが、回転軸O1に伝わる回転トルクτ1を回転半径Rkで割ったものとなり、下記の数式(13)のように表される。
【数11】
【数12】
【数13】
【0036】
数式(11)〜(13)より、回転トルクτ1は、数式(14)のように表される。但し、数式(14)におけるK1は、入力側の回転軸O1周りの回転剛性であり、数式(15)で表される。つまり、数式(15)は、2つの巻きばね14a,14bを入力側に設けることにより、回転軸O1周りの回転剛性がK1になるということを示している。
【数14】
【数15】
【0037】
また、数式(9)で示されるように、入力側のピニオン21の回転軸O1周りの回転と出力側のピニオン31の回転軸O2周りの回転には変速の関係があるので、回転トルク同士の関係も変速比の関係で表され、回転軸O1に働く回転トルクτ1は、回転減速比Nと出力側の回転軸O2に働く回転トルクτ2を用いて、下記の数式(16)で表される。
【数16】
【0038】
そして、数式(9),(16)より、回転トルクτ2は、数式(17)で表される。但し、数式(17)におけるK2は、出力側の回転軸O2周りの回転剛性であり、数式(18)で表される。つまり、無段変速機1aの入力側の回転軸O1に図4に示すような巻きばね14a,14bを設けることにより、入力側の回転軸O1周りに所望の回転剛性K1を生じさせることができ、更に無段変速機1aを介することにより、数式(18)に示すように、出力側の回転軸O2周りの回転剛性として、回転軸O1周りの回転剛性K1に回転減速比Nの2乗倍の回転剛性K2を作り出すことが可能になる。また、回転減速比Nは、可変であるので、出力に現れる回転剛性K2も可変になる。
【数17】
【数18】
【0039】
従って、ばねの剛性を硬い状態と柔らかい状態等を状況に応じて使い分けたいような場合に、ばね自体を取り替えることなく、この無段変速機1aを組み合わせることにより、出力側の剛性K2を所望の値に設定することが可能になる。従って、例えば、数式(6)で示されるL2/L1の値を1/√10から√10まで変化させることができるように無段変速機1aを設計した場合には、巻きばね14a,14bの効果が1/10から10まで変わることになる。つまり、ばねの効果を100倍変えることが可能になるので、力を加えてもほとんど変位がない硬い状態から同等の力で容易に動くような柔らかい状態を同じばねを利用して作り出すことができる。
【0040】
また、無段変速機1aを用いた駆動力伝達機構として、図4に示すような巻きばね14a,14bを設ける代わりに、例えば、ピニオン21と噛み合う歯車(不図示)を介して、粘性特性を付加するためのロータリーダンパ(不図示)等を取付けるように構成しても良い。ロータリーダンパとしては、例えば、オイルの粘性抵抗により発生する制動力を利用した回転系のダンパーやオイルの圧力を利用した揺動ダンパー等を利用することが可能である。ロータリーダンパの制動トルクは、回転速度に応じて、発生するトルクの値を変化するものであり、回転速度が上がるとトルクも上がり、回転速度が下がるとトルクも下がる特徴を有している。従って、ロータリーダンパを入力側に設けることにより、回転軸O2側に粘性特性を付加した出力をすることも可能になる。
【0041】
次に、本発明の第3の実施形態に係る無段変速機1bについて、図5を参照しつつ説明する。この無段変速機1bは、入力側の回転軸O1と同一直線上に出力側の回転軸を設けたものである。尚、無段変速機1、1aと同様の構成等については、同一の符号を付し、その詳細な説明は省略する。
【0042】
図5に示すように、無段変速機1bの入力部材2bは、モータ等により外部から入力される回転駆動力により回転軸O1を中心として回転するピニオン23と、該ピニオン23の回転に伴って、回転軸O3を中心として回転するピニオン24と、該ピニオン24の回転運動を直線運動として伝達するラック22とからなるものである。また、出力部材3bは、無段変速リンク6の回転を介して第2ポスト部材P2とともに直線Aと平行な直線B上を直線移動するラック32と、該ラック32の直線移動に伴って回転軸O4を中心として回転するピニオン34と、該ピニオン34の回転に伴って入力側のピニオン23の回転軸O1と同一直線上にある回転軸を中心に回転するピニオン33とからなるものである。尚、図5では、ピニオン23、24、33、34、及びラック22、32の歯は省略して図示している。
【0043】
このように構成される無段変速機1bでは、図5に示すように、入力側のピニオン23にモータ等により外部から時計回りの回転駆動力が入力され、ピニオン23が回転軸O1回りで矢印方向(時計回り)に回転すると、ピニオン24は、矢印方向(反時計回り)に回転し、ラック22及びラック22に固定されている第1ポスト部材P1が、直線A上を矢印方向(下向き)に移動する。そして、この第1ポスト部材P1の直線移動に伴って、無段変速リンク6は、回転軸Oを中心に矢印方向(反時計回り)に回転する。また、この無段変速リンク6の回転に伴って、ラック32に固定されている第2ポスト部材P2がスライド孔62に保持された状態でスライドしながら、直線B上を矢印方向(上向き)に移動することにより、ピニオン34は回転軸O4を中心として矢印方向(反時計回り)に回転する。そして、このピニオン34の回転に伴って、入力側の回転軸O1と同一直線上に設けられている出力軸に連結されているピニオン33が矢印方向(時計回り)に回転することになる。尚、本実施形態では、入力部材2bのピニオン23とラック22の間にピニオン24を設けているが、このピニオン24を省いて、ピニオン23とラック22でラック・アンド・ピニオンを構成するようにしても良い。出力部材3bについても、同様にピニオン34を省いて、ピニオン33とラック32でラック・アンド・ピニオンを構成するようにしても良い。また、この無段変速機1bも無段変速機1,1aと同様に移動手段5により回転軸Oの位置を移動させることにより、変速比を無段階に変化させることができる。
【0044】
次に、本発明に係る無段変速機1a等を利用した場合のロボット関節構造15の一例について図6及び図7を参照しつつ説明する。図6に示すロボット関節構造15は、冗長駆動関節としての実施例を示すものであり、台座Dに固定されたモータ16からの駆動力と、図2に示すような外部からモータ等により入力された駆動力を無段変速機1aを介して出力部材3aのピニオン31から出力する駆動力とを回転軸O5、O2周りで回転する出力リンク17に対して伝達する2入力1出力の機構である。尚、回転軸O5とO2は、それぞれ同一直線上に位置するものである。
【0045】
このロボット関節構造15は、図6に示すように、2入力1出力を行うための動作加算部18と、該動作加算部18の上側に設けられるモータ16と、動作加算部18の下側に上述の無段変速機1aに図4に示すような巻きばね14a、14bを付加した駆動力伝達機構とを備えるものである。尚、図6では、説明を簡易にするために、無段変速機1aの出力部材3aにおけるピニオン31のみ図示している。
【0046】
動作加算部18は、図6、7に示すように、モータ16の駆動力により回転する第1歯車18aと、ピニオン31から出力された駆動力により回転する第2歯車18bと、第1歯車18aと噛み合う第3歯車18cと、第2歯車18bと噛み合う第4歯車18dとを備えており、この夫々の歯車18a〜18dは、出力リンク17の内部に納まるように構成されている。
【0047】
第1歯車18aは、モータ16及び出力リンク17と回転軸O5を介して連結されており、モータ16からの駆動力により、第1歯車18a及び出力リンク17は、回転軸O5周りで回転する。第2歯車18bは、ピニオン31及び出力リンク17と回転軸O2を介して連結されており、ピニオン31からの駆動力により、第2歯車18b及び出力17は、回転軸O2周りで回転する。第3歯車18cは、第1歯車18aと噛み合っており、第1歯車18aの回転に伴って回転する。第4歯車18dは、第2歯車18bと噛み合っており、第2歯車18bの回転に伴って回転する。また、第3歯車18c及び第4歯車18dは、それぞれ同一回転軸O6で連結されており、それぞれこの同一回転軸O6周りを同じ回転角qIで回転する。尚、回転軸O6の両端は、出力リンクに設けられた軸受(不図示)により回転自在に支持されている。
【0048】
このロボット関節構造15の動作を示す基礎式は、数式(19)のように表される。尚、R1は第1歯車18aの半径、qA1は第1歯車18aの回転軸O5周りの回転角、R2は第2歯車18bの半径、qA2は第2歯車18bの回転軸O2周りの回転角、qは出力リンク17の回転軸O2,O5周りの回転角(関節角)、qIは第3歯車18c及び第4歯車18dの回転軸O6周りの回転角をそれぞれ表している。また、r1及びr2は、それぞれ数式(20)で表されるものであり、RI1は第3歯車18cの半径、RI2は第4歯車18dの半径を表している。また、数式(20)では、第1歯車18aの半径R1と第3歯車18cの半径RI1が同じ値であり、第2歯車18bの半径R2が第4歯車18dの半径RI2の2倍の値である場合を示している。
【数19】
【数20】
【0049】
この場合、数式(19)は、数式(21)のように表される。この数式(21)の出力のみについて整理すると、出力リンク17の回転角変位Δqに関して、数式(22)が成り立つ。この数式(22)は、ピニオン31が固定された状態で第1歯車18aがΔqA1回転すると、出力リンク17は第1歯車18aと逆向きにΔqA1回転し、第1歯車18aが固定された状態で、ピニオン31がΔqA2回転すると、出力リンク17はピニオン31と同じ向きにΔqA2の2倍回転することを表している。また、このとき、駆動力に関しても数式(23)が成立する。尚、τA1は第1歯車18aの駆動力、τA2は第2歯車18bの駆動力、τは出力リンク17の駆動力をそれぞれ表している。
【数21】
【数22】
【数23】
【0050】
従って、例えば、第1歯車18aの回転変位ΔqA1=−1〔rad〕で、第2歯車18bの回転変位ΔqA2=0の場合には、数式(22)より出力リンク17の回転変位Δq=1〔rad〕となる。また、第1歯車18aの回転変位ΔqA1=0で、第2歯車18bの回転変位ΔqA2=0.5〔rad〕の場合には、出力リンク17の回転変位Δq=1〔rad〕となる。また、駆動力に関しては、例えば、τ=25〔Nm〕の場合には、数式(23)よりτA1=−25〔Nm〕、τA2=50〔Nm〕となる。また、τA1=0又はτA2=0の場合には、τ=0となる。尚、ここでは数式(20)に示すように、第1歯車18aの半径R1と第3歯車18cの半径RI1が同じ値であり、第2歯車18bの半径R2が第4歯車18dの半径RI2の2倍の値である場合の例に基づいて説明しているが、R1,RI1,R2,RI2はこのような値に限定されるものではなく、適宜用途に応じて夫々の半径の値を設定しても良い。
【0051】
次に、本発明に係る無段変速機1a等を利用した他のロボット関節構造15a一例について図8を参照しつつ説明する。図8に示すロボット関節構造15aは、冗長駆動関節としての実施例を示すものであり、台座Dに固定されたモータ16からの駆動力と、図2に示すような外部からモータ等により入力された駆動力を無段変速機1aを介して出力部材3aのピニオン31から出力する駆動力とを回転軸O7周りで回転する出力リンク17に対して伝達できる2入力1出力の機構である。
【0052】
このロボット関節構造15aは、図8に示すように、2入力1出力を行うための動作加算部19と、該動作加算部19の上側に設けられるモータ16と、動作加算部19の下側に上述の無段変速機1aに図4に示すような巻きばね14a、14bを付加した駆動力伝達機構とを備えるものである。尚、図8でも、説明を簡易にするために、無段変速機1aの出力部材3aにおけるピニオン31のみ図示している。
【0053】
動作加算部19は、図8に示すように、モータ16の駆動力により回転軸O8周りを回転する第1プーリ19aと、ピニオン31から出力された駆動力により回転軸O2周りを揺動する揺動リンク19bと、該揺動リンク19bに固定されている2本の棒部材19cに夫々取り付けられている1対のプーリ19d、19eと、出力リンク17の下側で該出力リンク17と同軸O7で連結される第2プーリ19fと、夫々のプーリ19a、19d、19e、19fに巻回されるワイヤWとを備えている。この動作加算部19では、第2プーリ19fが回転駆動することにより、出力リンク17にその駆動力が伝達されるようになっており、第2プーリ19fは、第1プーリ19aの駆動及び/又は揺動リンク19bの揺動運動によって1対のプーリ19d、19eが駆動することによってワイヤWを介して駆動することになる。尚、図8では、ピニオン31から回転軸O2を介して揺動リンク19bに直接駆動力が伝えられ、該揺動リンク19bは、回転軸O2を中心として揺動するように構成されているが、ピニオン31に別途歯車(不図示)を介して揺動リンク19bに駆動力を伝達するように構成しても良い。
【0054】
また、このロボット関節構造15aにおける出力リンク17の角速度ωJは、第1プーリ19aの半径をRM、第2プーリ19fの半径をRJとした場合、下記の数式(24)のように表される。但し、ωMは第1プーリ19aの回転軸O8周りの角速度、ωAは揺動リンク19bの回転軸O2周りの角速度である。
【数24】
【0055】
従って、例えば、第1プーリ19aの半径RMと第2プーリ19fの半径RJが同じ半径である場合には、α1=1となる。この場合、数式(24)において、α1=1を代入すると、数式(25)のように表される。この数式(25)は、ωMのある大きさの動きが、ωJに逆向きの同じ大きさの動きになることを表しており、ωAのある大きさの動きが、ωJに2倍の大きさの同じ向きの動きになることを表している。
【数25】
【0056】
従って、モータ16が動きにくい場合でも、図8に示すような動作加算部19を組み合わせることにより、バックドライバビリティを改善することができる。つまり、出力リンク17に力を加えた時に、変位や加速度を生じやすくすることができるので、リハビリ等に用いるロボット関節構造として有効である。また、このようなロボット関節構造15aにより、無段変速機1a側では、無段変速リンク6の大きさ等に応じて動ける範囲は制限されるが、もう一方のモータ16により制限なく回転できるので、ロボット関節の可動範囲を広くすることができる。尚、ロボット関節構造15、15aにおけるそれぞれの動作加算部18,19の構造は、本発明に係る無段変速機1a以外の無段変速機等と組み合わせることも当然可能である。
【0057】
また、本実施形態に係る無段変速機1,1a、1bでは、入力側の並進運動を変速比を変えて出力側に並進運動として伝達する構造、及び入力側の回転運動を変速比を変えて出力側に回転運動として伝達する例について説明したが、入力側を無段変速機1のような構造にし、出力側を無段変速機1a、1bのように駆動力を出力するような構造にすることにより、並進運動を回転運動として伝達する構造や、逆に回転運動を並進運動として伝達する構造に設計することは適宜可能である。
【0058】
また、本発明の実施の形態は上述の形態に限るものではなく、本発明の思想の範囲を逸脱しない範囲で適宜変更することができる。
【産業上の利用可能性】
【0059】
本発明に係る無段変速機は、ロボットの関節構造を構成するための機構として有効に利用することができる。また、本発明に係る無段変速機を利用したロボット関節構造は、小型化を図ることができるので、リハビリロボットや福祉ロボット等のロボット関節構造として有効に利用することができる。
【符号の説明】
【0060】
1、1a、1b 無段変速機
2、2a、2b 入力部材
3、3a、3b 出力部材
4 移動部材
5 移動手段
6 無段変速リンク
61、62 スライド孔
15、15a ロボット関節構造
16 モータ(駆動手段)
17 出力リンク
19a 第1プーリ
19d、19e 1対のプーリ
19f 第2プーリ
19b 揺動リンク
O 回転軸
P1 第1ポール部材
P2 第2ポール部材
【特許請求の範囲】
【請求項1】
外部からの入力により所定の直線方向に移動可能な第1ポスト部材が固定された入力部材と、
前記第1ポスト部材が移動可能な直線と平行、且つ、前記第1ポスト部材の移動方向に対して逆向きに移動する第2ポスト部材が固定された出力部材と、
前記直線方向に対して垂直な方向に移動可能な移動部材を有する移動手段と、
前記移動部材に回転自在に支持され、且つ、前記第1ポスト部材及び前記第2ポスト部材の移動に伴って回転するように前記第1ポスト部材及び前記第2ポスト部材を夫々スライド可能に保持するスライド孔が形成された無段変速リンクと、を備え、
前記移動手段により前記無段変速リンクの回転軸から前記第1ポスト部材が移動可能な直線までの距離と前記第2ポスト部材が移動可能な直線までの距離との距離比を調節することにより前記入力部材と前記出力部材の変速比を無段階に変化させることを特徴とする無段変速機。
【請求項2】
前記入力部材は、外部から入力された回転駆動力により前記第1ポスト部材を前記直線方向に移動させ、
前記出力部材は、前記移動手段により調整された前記距離比に応じた前記変速比で前記回転駆動力を伝達することを特徴とする請求項1記載の無段変速機。
【請求項3】
請求項1又は2記載の無段変速機を用いたロボット関節構造であって、
駆動手段と、
該駆動手段による駆動力により駆動する第1プーリと、
前記無段変速機の出力部材から出力された駆動力により揺動する揺動リンクと、
該揺動リンク上に固定され、前記第1プーリの駆動に伴ってワイヤを介して駆動する1対のプーリと、
前記第1プーリの駆動及び/又は前記揺動リンクの揺動による前記1対のプーリの駆動に伴って前記ワイヤを介して駆動する第2プーリと、
該第2プーリの駆動軸上に揺動可能に取り付けられる出力リンクと、を備えることを特徴とするロボット関節構造。
【請求項1】
外部からの入力により所定の直線方向に移動可能な第1ポスト部材が固定された入力部材と、
前記第1ポスト部材が移動可能な直線と平行、且つ、前記第1ポスト部材の移動方向に対して逆向きに移動する第2ポスト部材が固定された出力部材と、
前記直線方向に対して垂直な方向に移動可能な移動部材を有する移動手段と、
前記移動部材に回転自在に支持され、且つ、前記第1ポスト部材及び前記第2ポスト部材の移動に伴って回転するように前記第1ポスト部材及び前記第2ポスト部材を夫々スライド可能に保持するスライド孔が形成された無段変速リンクと、を備え、
前記移動手段により前記無段変速リンクの回転軸から前記第1ポスト部材が移動可能な直線までの距離と前記第2ポスト部材が移動可能な直線までの距離との距離比を調節することにより前記入力部材と前記出力部材の変速比を無段階に変化させることを特徴とする無段変速機。
【請求項2】
前記入力部材は、外部から入力された回転駆動力により前記第1ポスト部材を前記直線方向に移動させ、
前記出力部材は、前記移動手段により調整された前記距離比に応じた前記変速比で前記回転駆動力を伝達することを特徴とする請求項1記載の無段変速機。
【請求項3】
請求項1又は2記載の無段変速機を用いたロボット関節構造であって、
駆動手段と、
該駆動手段による駆動力により駆動する第1プーリと、
前記無段変速機の出力部材から出力された駆動力により揺動する揺動リンクと、
該揺動リンク上に固定され、前記第1プーリの駆動に伴ってワイヤを介して駆動する1対のプーリと、
前記第1プーリの駆動及び/又は前記揺動リンクの揺動による前記1対のプーリの駆動に伴って前記ワイヤを介して駆動する第2プーリと、
該第2プーリの駆動軸上に揺動可能に取り付けられる出力リンクと、を備えることを特徴とするロボット関節構造。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−141016(P2012−141016A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−294390(P2010−294390)
【出願日】平成22年12月29日(2010.12.29)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月29日(2010.12.29)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
[ Back to top ]