
立体画像表示装置、物体近接検出装置および電子機器

【課題】立体画像の結像位置での操作検出が可能であり、かつ薄型化が容易な構造の立体画像表示装置等を提供する。
【解決手段】被検出物が接近する外面10Sと、光変調パネル51と、近接センサ部と、を有する。光変調パネル51は、入力される映像信号から3次元の立体画像を発生する。近接センサ部は、光変調パネル51の内部に実現してもよく、外面10Sの、被検出物が接近する側と反対の側に設けられている。このような近接センサ部は、映像信号に含まれる視差画素ピッチP等の視差情報に基づいて設定された外面との距離である3D表示高さHfで被検出物が外面10Sに近接したことを検出する。
【解決手段】被検出物が接近する外面10Sと、光変調パネル51と、近接センサ部と、を有する。光変調パネル51は、入力される映像信号から3次元の立体画像を発生する。近接センサ部は、光変調パネル51の内部に実現してもよく、外面10Sの、被検出物が接近する側と反対の側に設けられている。このような近接センサ部は、映像信号に含まれる視差画素ピッチP等の視差情報に基づいて設定された外面との距離である3D表示高さHfで被検出物が外面10Sに近接したことを検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体画像表示が可能であり、さらに、立体画像上での操作等を検出するための近接センサ機能を有する立体画像表示装置と、当該立体画像表示の機能をもつ電子機器とに関する。また、本発明は、物体の近接検出が可能な物体近接検出装置に関する。
【背景技術】
【0002】
近年、モバイル用途の液晶表示装置において、入力機能として、タッチパネルを用いるものが多くなってきている。液晶表示装置の前面に静電容量式、抵抗膜式あるいは光学式のタッチパネルを配置するものである。
【0003】
また、立体画像表示するものも、モバイル用途として、一部、製品化されている。視差を使って表示を行う場合、遮光部を設ける方式や、レンチキュラーレンズを用いる方式等がある。視差を使って立体画像を表示する技術については、例えば特許文献1に開示されている。
【0004】
立体画像表示を行って、その画像情報に従ってタッチパネルのように情報を入力する操作機器についても、検討が行われている(例えば、特許文献2〜4参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3101521号公報
【特許文献2】特開2004−272354号公報
【特許文献3】特開平8−161987号公報
【特許文献4】国際公開第WO06/035816号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献2に記載の発明は、立体表示した画像に含まれるボタンの操作に反応するような構成を有し、ボタンの操作に反応して表示内容を切り替えるものである。立体表示ボタンの操作の検出を行うセンサは静電容量式が開示され、「操作による横線と縦線の静電容量変化を検出する」とだけ記載されている。
【0007】
このため、実際にボタンを含む立体画像が出力される外面(保護層の際表面)にユーザが指等で接触しないと反応しない構成も含まれ、その場合、操作に違和感がある。つまり、立体画像は外面から離れた空間に結像されているため、ユーザが立体表示ボタンに触れたと感じてから、さらにボタンを押し込まないと実際に操作が認識されない。
【0008】
これに対し、上記特許文献2および特許文献3に記載の立体画像表示装置は、立体画像の表示ボタン等を操作するときに、立体画像表示位置でボタン操作がセンシングできるため、上記特許文献1のような操作上の違和感がない。
【0009】
しかしながら、上記特許文献2および特許文献3に記載の立体画像表示装置では、センサは、立体画像の結像位置の周囲に配置された発光体と受光体等からなり、発光体と受光体を保持する枠状の構成が必要である。このため、この立体画像表示装置は、装置自体が立体的で大きく、特に薄型化が困難なため、小型の電子機器への搭載は不可能に近い。
【0010】
本発明は、立体画像の結像位置での操作検出が可能であり、かつ薄型化が容易な構造の立体画像表示装置と、その立体画像表示装置を搭載することで小型化、薄型化にできる電子機器とを提供するものである。
また、本発明は、薄型化が容易な構造を有し、操作上の違和感がなく物体の近接検出を可能とする物体近接検出装置を提供するものである。
【課題を解決するための手段】
【0011】
本発明に関わる立体画像表示装置は、被検出物が接近する外面と、立体画像発生部と、近接(プロキシミティ)センサ部と、を有する。
前記立体画像発生部は、入力される映像信号から3次元の立体画像を発生する。
前記近接センサ部は、前記外面の、前記被検出物が接近する側と反対の側に設けられ、前記映像信号に含まれる視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する。
本発明では好適に、前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する。
【0012】
上記構成によれば、近接センサ部は、接触の検出も可能に構成できるが、物体(被検出物)が外面に接触せずとも近接しただけで物体の検出を行う。このとき、近接センサ部は、入力される映像信号に含まれる視差情報に基づいて設定される高さ(外面からの距離)で、被検出物が外面に近接したことを検出する。この高さの位置は、視差情報に基づいて立体画像が結像する高さ(外面からの距離)と同じ位置とすることができる。この場合、好適には、近接センサ部は、視差情報に基づいて立体画像が結像する高さと同じ位置、または当該高さより外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有することが望ましい。視差情報に基づいて立体画像が結像する高さと同じ位置に検出限界の下限をもつ場合、その位置に指等の被検出物がきた時点で、その近接が検出される。また、検出限界の下限が、さらに外面寄りの場合は検出範囲が広く、その分、検出の確度が高い。
【0013】
本発明に関わる物体近接検出装置は、上記外面と上記近接センサ部とを有する。
本発明に関わる電子機器は、上記外面、上記立体画像発生部および上記近接センサ部を有し、さらに画像処理部を有する。
前記画像処理部は、前記近接センサ部の検出結果に基づいて画像処理を実行し、前記画像発生部に入力する前記映像信号、前記光学部品に入力する前記視差情報の少なくとも一方を変更する。
【0014】
上記構成の電子機器では、近接センサ部の検出結果をアプリケーション等で規定される表示変更等の契機とする。その際、上記立体画像表示装置と同様に、入力される映像信号に含まれる視差情報に基づいて設定される高さ(外面からの距離)で、被検出物が外面に近接したことを検出する。このため、当該電子機器では、操作上の違和感がなく、応答性も高い(操作してから表示変更が行われるまでの時間が短い)。
【発明の効果】
【0015】
本発明によれば、立体画像の結像位置での操作検出が可能であり、かつ薄型化が容易な構造の立体画像表示装置と、その立体画像表示装置を搭載することで小型化、薄型化にできる電子機器とを提供することができる。
また、本発明によれば、薄型化が容易な構造を有し、操作上の違和感がなく物体の近接検出を可能とする物体近接検出装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態に関わる立体画像表示パネルが有する表示パネルの構成例を示すブロック図である。
【図2】表示部の断面構造図である。
【図3】近接センサパネルの概略的な平面図とパネル内部の断面構造図である。
【図4】パララックスバリアの概略的な断面構造図である。
【図5】表示パネル内の周辺回路と、それ以外の制御回路とを機能ブロックに分けて示す図(機能ブロック図)である。
【図6】立体画像の結像および視認の条件を説明するための図である。
【図7】第1の実施の形態に関わる静電容量式の近接センサパネルの物体検出の感度特性のグラフである。
【図8】立体画像表示用の画像の例を示す図である。
【図9】ボタン操作の例を示す模式図である。
【図10】第2の実施の形態に関わる表示パネルの概略的な断面図である。
【図11】図10に示す光変調パネルの平面と断面をさらに詳細に示す図である。
【図12】第3の実施の形態に関わる画素回路とセンサ回路の回路図である。
【図13】第3の実施の形態に関わる光学式の近接センサパネルの物体検出の感度特性のグラフである。
【図14】光学式の場合の機能回路図である。
【図15】第4の実施の形態に関わる、適応制御の基本的な流れを示すフローチャートである。
【図16】1つの3D表示ボタンで視差情報が変化する場合の模式図である。
【図17】複数のボタンで異なる結像高さが設定されている場合の操作前後の模式図である。
【図18】ボタンごとの閾値の設定範囲の例と、感度曲線上の閾値の設定例とを示す図である。
【図19】同じ結像高さでも異なる画像への変更がされる場合の模式図である。
【図20】同じ結像高さでも異なる画像への変更がされる場合の閾値設定を示す感度特性のグラフである。
【図21】変形例1を示す概略断面図である。
【図22】変形例1の作用を説明するための断面図である。
【図23】電子機器の構成を表すブロック図である。
【図24】テレビの斜視図である。
【図25】デジタルカメラの斜視図である。
【図26】ノート型パーソナルコンピュータの斜視図である。
【図27】ビデオカメラの斜視図である。
【図28】携帯電話機の開閉図、平面図、側面図、上面図および下面図である。
【発明を実施するための形態】
【0017】
本発明の実施の形態を、立体表示装置としては主に液晶表示装置を例として図面を参照して、以下の順で説明する。
1.第1の実施の形態:静電容量式の外付け近接センサパネルを有する液晶表示方式の立体画像表示装置。
2.第2の実施の形態:静電容量式の近接センサを内蔵する液晶表示方式の立体画像表示装置。
3.第3の実施の形態:光学式の近接センサ(光センサアレイ)を内蔵する液晶表示方式の立体画像表示装置。
4.第4の実施の形態:検出範囲の閾値および表示画像の適応制御の例。この実施の形態は、第1〜第3の実施の形態と重複適用できるが、ここでは第3の実施の形態での例を開示する。
5.変形例1:レンチキュラーレンズの光学部品への適用例。
6.変形例2:その他の変形例。
7.電子機器への本発明の適用例。
【0018】
<1.第1の実施の形態>
[表示パネル全体構成]
図1は、第1の実施の形態に関わる立体画像表示パネルが有する表示パネルの構成例を示すブロック図である。なお、図1に関し、図示されない表示方式の違い、近接センサの方式や内蔵形態の違いがあるが、図示されている構成自体が他の実施の形態に関わる立体画像表示装置においても共通する。
【0019】
図1に図解する表示パネル10Pは、静電容量式の近接センサ部を付加する外付け式の近接センサパネルが表面に貼られた表示部10DPと、その周辺回路とを有する。表示パネル10Pの最表面が、本発明の「被検出物(指先やスタイラスペン等)が接近する外面10S」である。
周辺回路は、表示Hドライバ(DH.DRV)5Hと、表示Vドライバ(DV.DRV)5Vと、センサ読み出しHドライバ(SRH.DRV)6Hと、センサ読み出しVドライバ(SRH.DRV)6Vと、を有する。
【0020】
表示Hドライバ5Hおよび表示Vドライバ5Vは、入力される映像信号PSおよび制御クロック(CLK)に基づいて、表示部10DP内の各画素の液晶素子を線順次駆動する回路である。
【0021】
センサ読み出しVドライバ6Vおよびセンサ読み出しHドライバ6Hは、表示部10DP内のセンサ領域に配置された近接センサ部を駆動し、センサ出力信号を取得する回路である。
【0022】
[表示部の断面構造]
図2に、表示部の断面構造図を示す。
図2に図解する表示部10DPは、外面10S側から順に、近接センサパネル60P、画像発生部としての光変調パネル51、光学部品としてのパララックスバリア(PV)43、および、バックライト20が配設されている。
【0023】
バックライト20は、詳細は図示しないが、導光板、LED等の光源、光源駆動部、反射シート、プリズムシートなどを一体に組み立てた画像ディスプレイ専用の照明装置である。
【0024】
光変調パネル51は、バックライト20側のTFT基板30と、外面10S側の対向基板31とを有する。TFT基板30と対向基板31には不図示の様々な電極や素子および光学機能層が適宜絶縁され、適宜平坦化されて形成される。
【0025】
より詳細には、TFT基板30の外面10S側の主面には、画素電極や駆動素子であるTFT(薄膜トランジスタ)が画素ごとの繰り返しパターンにて形成されている。また、インプレーンスイッチング(IPS)の表示モードが採用される場合、画素電極の下層に平坦化膜に埋め込まれて対向電極(共通電極ともいう)が形成される。画素電極やTFTが配置される層の上層に、第1配向膜が形成されている。
【0026】
一方、対向基板31の一方の面(裏面側)に、カラーフィルタと、平坦化膜と、第2配向膜とが形成されている。
【0027】
TFT基板30は、スペーサ(不図示)を介して内部空間を形成するように対向基板31と貼り合わされている。このとき、画素電極やTFTおよび第1配向膜を形成したTFT基板30の面と、カラーフィルタや第2配向膜を形成した対向基板31の面とが、対向するように両基板が貼り合わされる。
スペーサが形成されていない箇所から、2枚の基板間の内部空間に液晶が注入されている。その後、液晶の注入箇所が閉じられると、2枚の基板が貼り合わされたセル内に液晶が封入され、これにより液晶層が形成されている。液晶層は、第1配向膜と第2配向膜に接しているため、それら配向膜のラビングの向きで液晶分子の配向方向が決められる。
【0028】
このように形成された液晶層に対し、画素ごとの画素電極と、画素間で共通な対向電極(共通電極)とが、層厚方向に隣接配置される。この2種類の電極は、液晶層に電圧を印加するための電極である。液晶層を挟んで2つの電極が配置される場合(縦方向の駆動モード)と、TFT基板30側に2つの電極が2層配置される場合(横方向の駆動モード、例えばIPSモード)とがある。
IPSモードの場合、画素電極と対向電極(共通電極)は絶縁分離されているが、下層側の対向電極は、上層側で液晶層に接する画素電極のパターンの間から液晶に電気的な作用を与える。このため、横方向の駆動モードでは電界の向きが横方向となる。これに対し、2つの電極が液晶層を、その厚さ方向から挟んで配置される場合は、電界の向きが縦方向(厚さ方向)となる。
【0029】
いずれの駆動モード仕様で電極が配置されている場合でも、図1の表示Hドライバ5Hおよび表示Vドライバ5Vの駆動の制御時に、2つの電極によって液晶層に対し電圧をマトリクスに駆動可能である。このため、液晶層は、その透過を光学的に変調する機能層(光変調層)として機能する。液晶層は、図1の表示Hドライバ5Hに与えられる映像信号PSに基づき、画素電極に印加される電圧の大きさに応じて階調表示を行う。
【0030】
図2に示すように、TFT基板30の他方の主面(裏面)には、第1偏光板40が貼られている。第1偏光板40と対をなす第2偏光板50が、対向基板31の外面10S側の面に貼られている。
【0031】
第2偏光板50と外面10Sとの間に、近接センサパネル60Pが配置されている。近接センサパネル60Pの光変調パネル51と反対側の面が保護層に覆われ、その最表面が、外部から画像を視認し、また被検出物が接近する外面10Sとなっている。
【0032】
なお、図2においてパララックスバリア43の構造の詳細は、更に詳細な図を参照して後述する。
【0033】
[近接センサパネルの構成]
図3(A)に、近接センサパネルの概略的な平面図を示す。図3(A)は、図2の外面10S側からパネル内部を透視した図である。また、図3(B)に、図3(A)のA−A線に沿った概略断面図を示す。
図3(B)に図解するように、近接センサパネル60Pは、第1センサ基板61と、第2センサ基板62との間に駆動電極DEmが配置されている。第2センサ基板62の駆動電極DEm側と反対の面、すなわち外面側の面に、n本のセンサ線SL1〜SLnが配置されている。n本のセンサ線SL1〜SLnは、被検出物の近接に応答して電位が変化する検出電極として機能する。
【0034】
n本のセンサ線SL1〜SLnは、図3(A)に示すようにy方向に細長い複数の配線から形成されている。以下、センサ線SL1〜SLnの任意の1本を、センサ線SLi(i=1,2,3,…,n)と表記する。
【0035】
駆動電極は、図3(A)に示すように、x方向に長い帯状に形成され、y方向に同一ピッチでm個配置されている。m個の駆動電極DEj(j=1,2,3,…,m)は、n本のセンサ線SL1〜SLnと異なる方向に配置されている。本例では、駆動電極DEjとセンサ線SLiが直交して配置されている。
【0036】
図3(B)に示す第1センサ基板61と第2センサ基板62の材質を限定しない。ただし、光透過性の材質から2つのセンサ基板を形成する必要がある。また、n本のセンサ線SL1〜SLnの各々(SLi)がm個の駆動電極DE1〜DEmの各々(DEj)と容量結合している必要がある。そのため当該容量結合を所定の強さとするという観点から、第2センサ基板62の厚さや材質が規定されている。その観点では第2センサ基板62を省略し、絶縁物をn本のセンサ線SL1〜SLnとm個の駆動電極DE1〜DEmとの間に介在させてもよい。
【0037】
図3(A)に示すように、m個の駆動電極DE1〜DEmの一方端に接続されてセンサ読み出しVドライバ6Vが配置されている。また、n本のセンサ線SL1〜SLnの一方端に接続されて検出判定部6が配置されている。
センサ読み出しVドライバ6Vは近接センサパネル60P内に形成されるが、検出判定部6の一部の機能、特に読み出されたセンサ出力信号から被検出物の有無や位置を判定する機能は、近接センサパネル60Pの外部にもたせてもよい。
【0038】
センサ読み出しVドライバ6Vは、駆動電極ごとに交流信号源ASを有する。センサ読み出しVドライバ6Vは、活性化する交流信号源ASを、図3(A)のセンサ読み出しVドライバ6Vのブロック内で矢印により示す方向(走査方向)内で切り替える回路である。あるいは、センサ読み出しVドライバ6Vは、1つの交流信号源ASを有し、この1つの交流信号源ASと、m個の駆動電極内の1つの駆動電極DEjとの接続を上記走査方向内で切り替える回路である。
センサ読み出しVドライバ6Vは、その外部(例えば不図示のCPUやパルス発生回路等)から与えられる制御信号に基づいて、走査のアルゴリズムにしたがって制御されるとしてもよい。
【0039】
なお、本実施の形態では、駆動電極とセンサ線との直交配置は必須ではなく、各センサ線と各駆動電極との容量結合が、検出面内で均一またはほぼ均一となれば、両者の形状や配置を特に限定する必要がない。
図3(A)のように検出面の直交する2つの辺の一方の側からセンサ線を引き出して検出判定部6に接続し、上記2つの辺のもう片方の側から駆動電極を引き出してセンサ読み出しVドライバ6Vに接続する。すると、検出判定部6とセンサ読み出しVドライバ6Vの配置が行いやすい。そのため駆動電極とセンサ線との直交配置は望ましいが、これに限定することが必須というわけではない。
【0040】
[パララックスバリアの断面構造および動作]
図4に、パララックスバリアの概略的な断面構造を示す。
図解するパララックスバリア43は、図2にも示すように、光変調パネル51(図2)の偏光板と兼用する第1偏光板40と、第3偏光板41と、第1偏光板40と第3偏光板41の間に配設された光制御層42と、を有する。
【0041】
光制御層42は、例えばスイッチ液晶として機能し、第1PV基板44と、第2PV基板45との間にスイッチ液晶層46が封入された構造を有する。
スイッチ液晶層46には、図2のバックライト20からの平面状の光が第3偏光板41で直線偏光となった後に入射される。スイッチ液晶層46からの光は、第1偏光板40で、スイッチ液晶の状態に応じて吸収または透過される。スイッチ液晶層46は、入射光を、第3偏光板41および第1偏光板40との相互作用で部分的に遮光する機能を持つ。そのためには、スイッチ液晶層46に印加する電圧を部分的にオンまたはオフする必要がある。
この電圧のスイッチングは、第1PV基板44と第2PV基板45の対向面の一方と他方に形成されたPV駆動電極(不図示)と、PV共通電極(不図示)とに、電位差の有無(または大小)を発生させることにより制御される。例えば、PV駆動電極が画素の列(画素カラム)ごとに形成され、これが行方向に画素の配列に対応したピッチで配置される。PV共通電極は、例えば1枚の平板状に形成される。PV駆動電極とPV共通電極はいずれも、光透過性が高い透明電極材料から形成される。
また、PV駆動電極とPV共通電極はいずれもライン状に形成されており、縦横(ランドスケープ、ポートレート)どちらでもストライプを形成することができる。このため、後述するように表示画像を90度回転する前後のどちらでも3D表示が可能になる。
【0042】
上記構成と、液晶印加電圧の画素ピッチを最小単位としたスイッチングにより、図4(A)に示す視差なしに対応した面状光の出力状態と、図4(B)に示す視差ありに対応した離散的な平行ストライプ光の出力状態とが切り替えられる。平行ストライプ光の出力状態において、光を遮光する部分を「視差バリア」と呼び、光を透過する部分を「スリット」と呼ぶ。
2次元画像を表示する図4(A)の場合は、パネル全面が白状態となるため、透過率の大きな低下はない。一方、3次元画像を表示する図4(B)の場合は、液晶がライン状にスイッチングし、スリットで分離されたストライプ状の視差バリアが形成される。
【0043】
液晶印加電圧のスイッチングは、「表示制御部」により制御される。表示制御部が行う制御には、スイッチングを行う場合(図4(B))と行わない場合(図4(A))の制御を含む。スイッチングを行わない図4(A)の場合、図2の光変調パネル51には、視差情報を含まない映像信号PSの供給により2次元画像が表示される2次元画像表示モードとなる。一方、スイッチングを行う図4(B)の場合、視差情報を含む映像信号PSの供給と、この光の液晶スイッチングとの相互作用により、視差をもつ3次元画像が発生する3次元画像の表示モードとなる。
表示制御部は、2次元画像と3次元画像の切り替えは全画面で双方向に行うことができ、また、画面の一部で行うこともできる。つまり、2次元表示画像の一部を3次元画像に切り替え、逆に、3次元表示画像の一部を2次元画像に切り替えることができる。
【0044】
更に、表示制御部は、3次元画像の表示モードにおいて、視差が発生する方向を90度回転することができる。具体的に、表示制御部は、列方向に長い平行ストライプ光から、行方向に長い平行ストライプ光へ変更することにより、視差発生の方向を90度回転する。これは、立体表示装置を視認する向きをユーザが90度回転させることに対応して、両目の離間方向に視差発生の方向を合わせるためである。
【0045】
なお、スイッチ液晶層46の表示モードとしては、透過率の高いツイストネマチックモードが望ましいが、垂直配向モードやインプレーンスイッチングモード等、白黒が切り替えできれば、他のどの表示モードでも構わない。
また、電極構造としては、単純マトリクスで問題ないが、一部のみ3D表示にしてその位置も変えるといった場合は、アクティブマトリクスの白黒パネルを使うことも可能である。
【0046】
[立体画像表示と近接検出のための回路]
上記構成を前提とした立体画像表示と近接検出の動作を説明するが、その制御を行う回路を、最初に説明する。
【0047】
図5は、本実施の形態に関わる立体画像表示装置内に設けられ、図1に示す表示パネル10P内の周辺回路と、それ以外の制御回路とを機能ブロックに分けて示す図である。
図5においては平面図を3つ並べているが、これは1つの表示パネル10P内で、バックライト20以外の3つの機能階層を示すものである。
センサ領域SRと表記された機能層は、図2の近接センサパネル60Pに対応する。また、ディスプレイ領域DRが光変調パネル51に対応し、パララックスバリア領域PVRがパララックスバリア43に対応する。
【0048】
この3つの領域(機能階層)を駆動・制御する回路としては、表示Hドライバ5Hと表示Vドライバ5Vからなる表示駆動回路5Aと、センサ駆動検出部6Bと、CPU等の制御回路7と、パララックスバリア駆動回路(PV.DRV)8Aとが存在する。
【0049】
センサ駆動検出部6Bは、図1のセンサ読み出しHドライバ6Hとセンサ読み出しVドライバ6Vからなるセンサ駆動回路6Aの機能を含む。本例では、センサ駆動回路6Aと制御回路7により、図3(A)にも示す検出判定部6が構成されている。
【0050】
例えば、パララックスバリア駆動回路8Aと制御回路7によりPV制御部8が構成され、さらに、PV制御部8と表示駆動回路5Aにより、本発明の「表示制御部」の一例が構成される。
表示制御部は、パララックスバリアの動作で既に説明した各種制御をPV制御部8で行い、光変調パネル51の駆動を表示駆動回路5Aで行う。
【0051】
[立体画像表示動作]
図6は、立体画像の結像および視認の条件を説明するための図である。
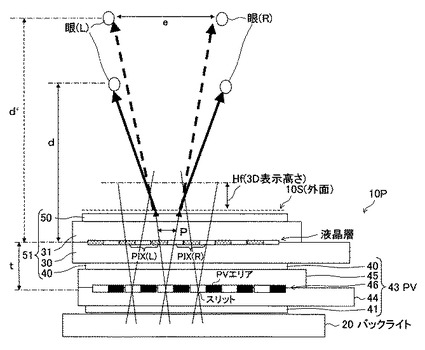
入力された映像信号PSに基づく表示制御部の制御を受けて、右目のための画像が離散的な画素(以下、R画素PIX(R))に表示され、左目のための画像が他の離散的な画素(以下、L画素PIX(L))に表示される。同一の絵素に対応するR画素PIX(R)とL画素PIX(L)との視差発生方向の画素単位のピッチを、図6では“視差画素ピッチP”で表している。図6の例では視差画素ピッチPが光変調パネル51の画素のピッチと対応しており、1画素ごとに、R,L,R,L,…と左右の画像が繰り返される。そのため、もとの画像について、解像度は、半分になる。同一の絵素に対応するR画素PIX(R)を通る光とL画素PIX(L)を通る光は、それぞれ観察者の右目と左目に入る。このとき観察者は、外面10Sから所定の距離で画像があたかも結像して見える。以下、この3D表示画像の仮想的な像位置(外面10Sから距離)を“3D表示高さHf”と呼ぶ。
視差画像ピッチが、いわゆる画像のずれ量に相当し、3D表示高さは、いわゆる3D画像の飛び出し量に相当する。
【0052】
光変調パネル51の画素ピッチと、パララックスバリアが形成するバリアのラインのピッチは完全に一致させると正面中央しか視差が合わない。そのため、パララックスバリアのピッチは、視差を合わせるために、光変調パネルの画素ピッチに比べて若干大きくなっている。
【0053】
図6中、光変調パネル51の液晶層からパララックスバリア43の液晶層(スイッチ液晶層46)までの距離を“t”で表し、一般的な人の両目の離間距離を“e”で表す。この場合に、p:t=e:(t+d’)で規定される“d’”が表示パネル10Pの画像光経路の平均屈折率(ガラスの屈折率が支配的)と空気の屈折率とに差がない場合の眼の位置を表している。
主にガラスと空気の屈折率差を用いて実際の視認で最適な位置を概算すると、立体画像の視認位置dは、おおよそ、d≒d’/1.5で求めることができる。
なお、液晶表示パネルの前方側、後方側で交互に結合するが、本方式では正面から見た場合、前方で結合するようにパララックスバリアを配置する。
また、パララックスバリアパネルの位置は光変調パネルとバックライトの間としたが、これは、順番が逆でもよく、バックライト→光変調パネル→パララックスバリアパネルの順番でもよい。
【0054】
3D表示高さHfは、光の拡散度等、他のパラメータにも依存するが、これらのパラメータを一定とした場合、主に視差画素ピッチPで制御できる。つまり、視差画素ピッチPが大きければそれだけ3D表示高さHfも大きくなる。
画素が細かいパネルを使う場合は、外面10Sからの距離が数[mm]〜数十[mm]の実用的な範囲に3D表示高さHfを収めるには、ガラス厚を薄くする必要がある。本実施の形態では、パララックスバリア43、光変調パネル51の両方のガラスをエッチングして薄くすることにより、この仕様を満たしている。
【0055】
[物体検出動作]
物体検出動作は、図3の近接センサパネル60Pを、図5の検出判定部6が制御することで行われる。
【0056】
図3において、m本の駆動電極DE1〜DEmと、n本のセンサ線SL1〜SLnの各々が所定の強さで静電容量結合しており、その状態で、センサ読み出しVドライバ6Vの走査によってm本の駆動電極DE1〜DEmが順次交流駆動される。指先が外面10Sから十分遠い場合は、n本のセンサ線SL1〜SLnの電位変化(交流電圧変化)が均一である。指先が外面10Sにある程度近づくと、その付近の幾つかの電極交差部分で既存の静電容量に人体の外部容量が実効的に外付けされる状態となる。そのため、交流電圧変化の波高値が、その外部容量の大きさに依存して低下する。
【0057】
この交流電圧変化の波高値の低下は、例えば、以下のようにして検出判定される。
図3(A)の検出判定部6、特に図5に示すセンサ駆動検出部6Bには、例えばセンサ線ごとに検出回路が設けられている。検出回路の出力は、制御回路7との協働により定期的にサンプリングされて、サンプリング結果がある閾値Vtで判定され、物体の有無が監視される。ここで、センサ線ごとの検出回路は、望ましくは、センサ駆動回路6Aとともに表示パネル10P内に配置される。例えば、センサ線ごとの検出回路をセンサ読み出しHドライバ6Hとして設けることができる。
【0058】
センサ読み出しVドライバ6Vが画面内の順次走査を繰り返している最中に、あるセンサ線(通常、連続した複数のセンサ線)で、サンプリング結果のレベルが低下し、閾値Vtを下回ることが観測される。すると、検出判定部6は指先等の物体が、外面10Sに近接(または接触)したと判定する。
この近接判定がされる単数または複数のセンサ線アドレスがx方向の物体位置に対応し、近接判定がされる時間(クロックの同期情報から得る1画面走査時間内の時間)がy方向の物体位置情報に相当する。
したがって、検出判定部6は、物体近接検出だけでなく、その位置を検出することができる。
【0059】
本実施の形態では、映像信号PSに含まれる視差情報(例えば視差画素ピッチPに対応)に基づいて設定された外面との距離(高さ)で被検出物が外面10Sに近接したことを検出する。より望ましい要件は、近接センサパネル60Pは、視差情報に基づいて立体画像が結像する3D表示高さHf(図6)と同じ位置、または当該3D表示高さHfより外面10Sに近い側の位置に検出限界の下限をもつ物体検出感度特性を有する。
【0060】
図7に、近接センサパネル60Pの物体検出感度特性の例を示す。図7の横軸は図6の外面10Sの位置を原点とした高さ方向(z方向)の距離を現し、縦軸は任意単位(a.u.)の感度Iを表す。
例えば、検出限界の下限感度が図7の縦スケール換算で1(a.u.)とすると、外面10Sの接触状態から高さが約10[mm]付近までは物体検出が可能である。通常の視差画素ピッチPが、数[mm]〜10[mm]までの3D表示高さHfで立体画像を発生させるように規定されていると、図7の感度特性で上記望ましい要件が満たされる。
【0061】
一方、図7の感度特性では上記望ましい要件が満たされないときは、満たされるように表示パネル10Pの構造パラメータが設定されていることが、本実施の形態における立体画像表示装置の特徴である。
このような構造パラメータとして最も有効なのが、近接センサの配線、ガラス厚といったパラメータである。センサについては、配線幅(駆動電極DEやソース線SL)を大きくし、場合によっては配線を間引いて所望の配線幅を確保することによって感度を向上させるという方法が可能であり、3D表示モードでは配線を束ねて荒めに検出し、2D表示モードでは元に戻して細かく検出するということも可能である。
【0062】
なお、構造パラメータは光学部品がパララックスバリア(PV)以外の場合もあり、光変調パネル51も液晶パネル以外の場合もある。ただし、いずれにしても、通常、ガラス等の光透過材料の支持体が存在し、その支持体の厚さ削減が全体の厚み削減への寄与が大きい。よって、画像発生部(本例では光変調パネル51)と光学部品(本例ではPV)の少なくとも一方の支持体の厚さを、感度向上のために削減する構造パラメータとする。この場合も、上記他の構造パラメータ(例えば、センサ配線幅)を支持体の厚さと組み合わせて厚さ削減対象としてもよい。
【0063】
図8に、立体画像表示用の画像の例を示す。
図8(A)および図8(B)に示すように、2次元画像を左、右の用途に分けて作り、1ラインおきに左、右の2次元画像が交互に重なった空間分割の映像信号PSが光変調パネル51に与えられる。映像信号PSには重畳時の画像の空間的なずれを表す視差情報が含まれる。光変調パネル51および表示制御部は、光変調パネル51から視差情報を検出し、視差情報に適した制御をパララックスバリア43で行うことによって、2つの2次元画像が合成された立体画像(図8(C))を発生させる。
なお、図5の構成例では、制御回路7が視差情報の抽出を行うが、視差情報の抽出を制御回路7以外の専用回路で行っても構わない。
【0064】
立体画像は任意であるが、一例として操作ボタンを立体表示する場合がある。
図9に、ボタン操作の例を示す。図示例では、4つのスタートボタンが同一の3D表示高さHfで立体表示されている。このうち“START C”の立体表示ボタンが操作されると(図9(A))、その時点ですぐにセンサ反応(物体判定)が発生し、直ぐに、図9(B)のように、その操作された立体表示ボタンのみ3D表示高さHf=0の2次元表示ボタンに変更される。そのため、操作者は立体画像でも通常の2次元画像と同様な、操作時点で瞬時に操作の結果がわかるため、操作上の違和感が解消される。
【0065】
このような反応性のよさは、センサの反応位置を、外面10Sから離れたところの立体画像の結像位置(3D表示高さHf)に合わせておくことにより、達成される。そのためには、前述した感度特性に関する望ましい要件が満たされるように当該立体画像表示装置が構成されている。画像の切り替えは、この場合、他の3つのスイッチは3Dのままであるため、パララックスバリアはそのまま維持され、その一つのスイッチについて画像のみ、2Dに切り替わる。
【0066】
本方式では、通常の2次元を表示することも、パララックスバリアパネルを通常の白表示にすることにより可能となる。この場合、タッチパネルは、駆動設定により、通常の接触式タッチパネルとして使うことも可能である。
【0067】
なお、以上の画像切り替えはアプリケーションプログラムに応じて適宜変更されるものであり、ボタン操作の場合に限定されない。操作位置の情報が重要な、例えばお絵かきソフトのような用途でも反応性がよい画像切り替えが可能である。
また、パララックスバリアをそのまま駆動させておいて、入力される映像信号が2D表示のものであれば、2Dを表示することも可能である。この場合の2D表示は解像度が低いが、3Dの画像情報が入力された場合、スムーズに3Dを表示することができるという利益が得られる。
【0068】
ただし、当該立体画像表示装置が特定用途の機器、たとえば銀行その他の手続きを行うもの等である場合には、アプリケーションプログラムとその実行処理手段(画像処理回路)そのものを立体画像表示装置内部にもたせてもよい。このような画像処理回路は大規模なため、一般には表示パネル10P外の基板にICとして実装されるが、その実装基板を含めて立体画像表示装置を構成してもよい。
【0069】
そのような実行処理手段は、本実施の形態では図示しないが、後述の電子機器への適用例で詳示するものと同様に、表示映像へのフィードバックを行うことで画像の切り替えを実行する。なお、電子機器の場合、内部記憶したアプリケーションプログラムが複数存在し、それらが切り替えられること、また外部から新たにプログラムが移植される場合がある点で、特定用途の専用機器とは異なる。
【0070】
<2.第2の実施の形態>
第2の実施の形態は、表示パネルに静電容量式センサを内蔵した例として、表示パネルの駆動電極がセンサ駆動電極と共用される一部内蔵型の構成に関する。第1の実施の形態とは構造上の違いがあるのみで、その他の動作や検出手法等は、第1の実施の形態と共通するため、以下、その違いのみ説明する。
【0071】
図10に、本実施の形態に関わる表示パネルの概略的な断面図を示す。
図10の構成では、近接センサパネル60P(図2)が省略され、符号52により示す光変調パネルが、そのセンサの機能をもつ。以下、この光変調パネルを、センサ内蔵パネル52と呼ぶ。
【0072】
図11(A)〜図11(C)に、さらに詳細な断面図と平面図を示す。
図11(A)に示す断面構成は、IPSモード等の縦方向の駆動モードで動作する表示パネル構成である。
【0073】
図11(A)の表示パネル10Pは、後述する第3の実施の形態の図12と同様な画素がマトリクス配置されている(図解では6画素分のみ示す)。各画素は、液晶層25に電圧駆動する電極は、画素ごとに分離されてマトリクス配置された画素電極22であり、他方側の電極は複数の画素で共通な駆動電極23である。
【0074】
画素電極22は、不図示のTFTを介してy方向に長い画素列ごとに配線された信号線に接続され、この信号線に映像信号PSが与えられる。映像信号PSの供給制御は、図1の表示Hドライバ5Hにより行われる。
TFTのゲートはx方向に長い画素行ごとに配線された走査線で駆動され、複数の走査線は表示Vドライバ5Vによって線順次走査が行われる。
【0075】
駆動電極23には、コモン駆動信号Vcomが与えられる。コモン駆動信号Vcomは、中心電位を基準として正と負の電位を、1水平期間(1H)ごとに反転した信号である。
駆動電極23は、例えば、TFT基板30に形成された平坦化内に埋め込まれて形成され、その平坦化膜上に画素電極22が形成されている。なお、不図示のTFTを形成する半導体薄膜、信号線や走査線などの画素制御配線等も、この平坦化膜内に階層化されて形成されている。さらに、
TFT基板21に、図11に示す検出判定部6の検出回路DETが形成されていてもよい。
【0076】
駆動電極23は、近接検出動作を行う近接センサの一部を構成するタッチ検出センサの駆動電極DE(第1の実施の形態参照)としても兼用されるものである。
【0077】
より詳細に望ましい駆動では、図11(C)に示すように、k本の駆動電極23を1つの駆動電極DEとしてセンサ読み出しVドライバ6Vによる駆動が行われる。このとき、最初の駆動電極DE1は駆動電極23_1〜23_kを選択するように決められる。つぎの駆動電極23の選択駆動(駆動電極DE2の駆動)では、駆動電極DE1選択時の駆動電極配列から、k本より少ない1以上の任意本数の駆動電極23だけシフトして次のk本の駆動電極23が決められる。この動作が繰り返されてセンサ駆動が行われる。
【0078】
このような駆動では、駆動電極DEはその幅が大きくないと感度(センサ線SLの交流電圧変化の低下量)が大きくできない。その一方で、これを単一の導電層から形成すると、駆動時に切り替わりが視認されてしまう。このトレードオフを解消または緩和するために、このような駆動が望ましい。
第1の実施の形態で図7の感度特性を向上させたい場合があるが、センサ内蔵型ではこのトレードオフが感度特性向上の制限要因となる場合がある。そのような場合、図11(C)に示す複数電極の選択とシフトの手法を採用すると、その制限要因が撤廃または緩和され、より感度向上がしやすい利益を享受できる。
【0079】
対向基板31は、その液晶層側にカラーフィルタ24が形成されている。カラーフィルタ24は、例えば赤(R)、緑(G)、青(B)の3色のカラーフィルタ層を周期的に配列して構成したもので、画素PIX(画素電極22)ごとにR,G,Bの3色の1色が対応付けられている。なお、1色が対応付けられている画素をサブ画素といい、R,G,Bの3色のサブ画素を画素という場合があるが、ここではサブ画素も画素PIXと呼称する。
【0080】
対向基板31の他方の面(外面10S側)には、センサ線SLが形成され、さらに、センサ線SLの上には、第2偏光板50が形成されている。センサ線SLの配列自体は図3に示すものと同様である。一方、第1偏光板40は、第1の実施の形態と同様、TFT基板30の裏面に貼られている。
なお、第2偏光板50とセンサ線SLの形成層とは図示例と逆であってもよい。また、対向基板31に、近接検出動作を行う検出判定部6の検出回路DETが形成されていてもよい。
【0081】
第1の実施の形態の近接センサパネル60Pを示す図3(B)の断面では、センサ線SLが外面10S側に配置され、駆動電極DEmが第1センサ基板11と第2センサ基板12との間に配置されている。
この基本配置は、図11(A)でも踏襲されている。つまり、基板の位置関係で言えば、第1センサ基板11にTFT基板30が対応し、第2センサ基板12に対向基板31が対応するため、その両基板間に駆動電極23(駆動電極DEmの構成要素)が配置されている。また、第2センサ基板12の外面10S側にセンサ線SLが配置されている。
図3ではセンサ線SLと駆動電極DEmの配置位置を反対とすることもできるが、図11では、センサ線SLは周囲に電位変動する電極や配線がないことが必要なため、センサ線SLを外面10S側とする必要がある。
【0082】
なお、液晶層25とTFT基板30との間、および液晶層25と対向基板31との間には、それぞれ配向膜が配設される。
【0083】
上記第2の実施の形態、ならびに、前述した第1の実施の形態において、液晶層25は、TN(ツイステッドネマティック)、VA(垂直配向)、IPS(インプレーンスイッチング)、ECB(電界制御複屈折)等の各種表示モードに適合した液晶材料が用いられる。
また、アクティブマトリクス駆動が望ましいが、そのための画素選択に用いるTFTが形成される半導体薄膜は、多結晶シリコン(p−Si)、非晶質シリコン(a−Si)のいずれの膜であってもよい。
【0084】
TNやVAの液晶層は、通常、縦電界の駆動モードであるが、その場合、図11(B)のように、駆動電極23が対向基板31の側、つまりカラーフィルタ24と配向膜(不図示)の間に配置される。
このため駆動電極23は、コンタクト導電柱によってTFT基板21と連結されている。このコンタクト導電柱を介して、TFT基板21から駆動電極23に交流パルス波形のコモン駆動信号Vcomが印加されるようになっている。
図11(B)でも検出回路DETは、対向基板31の側に形成してもよいし、TFT基板30の側に形成してもよい。
【0085】
第2の実施の形態では、センサ内蔵パネル52として、近接センサパネルの機能と表示パネルの機能が一体化しているため、特に大きな厚さをしめる支持体としての(ガラス)基板の枚数が削減されている。よって、第1の実施の形態より高感度化しやすい利点がある。
【0086】
<3.第3の実施の形態>
センサ感度が半導体デバイスの進歩で向上しやすく、より高感度で、また表示パネルに内蔵しやすい方式として光学式がある。
本実施の形態は、光学式センサを表示パネル内に有する立体画像表示装置に関する。以下の説明において、特に近接センサの回路構成と、それ以外で第1および第2の実施の形態で述べた静電容量式と異なる点とを述べる。したがって、すでに述べたパララックスバリア(PV)の構造、立体画像表示動作の基本、および、光と静電容量変化という検出原理を除く物体検出動作の基本(特に検出感度と結像高さとの関係)は、実施の形態間で差がない。
【0087】
本実施の形態では、センサ内蔵パネル52を有する点で第2の実施の形態と共通する。そのため、図10の概略断面構成は、本実施の形態でも適用できる。
【0088】
光学方式では、受光素子を含むセンサ回路をマトリクス配置した光センサアレイをセンサ内蔵パネル52内に有する。その位置は、TFT基板30側、対向基板31側のどちらでもよい。
例えば対向基板31側に光センサアレイを形成する場合を、図11(A)の静電容量式の断面を借りて説明するとするならば、その形成位置は、通常、対向基板31とカラーフィルタ24の間となる。ガラス基板の一方の面にTFT製造技術で光センサアレイを形成し、その裏面にカラーフィルタ24を形成可能であれば、光センサアレイを対向基板31と第2偏光板50の間(この場合、センサ線SLはない)に配置してもよい。
【0089】
一方、光センサアレイをTFT基板30側に形成する場合は、製造のしやすさから、画素電極22よりTFT基板30側の、画素ごとのTFTが形成される層と同一の階層で光センサ回路を形成することが望ましい。ただし、異なる階層でも構わない。
【0090】
光センサ回路に受光素子を含むが、その光源は図10のバックライト20から与えられるようにしてよい。ただし、表示光と同じ光源からの光が被検出物に反射して発生した反射光を受光する場合、そのままだと周囲の乱反射の影響で受ける光がノイズ成分となるため大きな受光感度が得られない。
S/N比を改善するには、受光素子の感度特性を可視光とは異なる非可視光、例えば赤外線に感度ピークまたは感度中心波長を持つように設定することが望ましい。また、赤外領域にピーク等を持たずとも、可視光の分布中心から感度ピーク等をずらして、近赤外領域またはその近くに感度ピーク等を設定するだけでS/N比の改善が見られるため、それでもよい。
【0091】
受光素子の感度ピークや受光中心波長に対応した波長の光源を、バックライト20内に持たせてもよいし、赤外線等の検出光の発光専用にバックライト20と重ねて面発光部を設けてもよい。この面発光部は、可視光に十分な透過性が確保されるならば、光変調パネルと外面10sとの間に配置してもよいが、この場合、図6の3D表示高さHfがとれなくなる可能性があるし、専用の面発光部を設けるとコスト的にも不利である。
そこで望ましくは、赤外LEDを、白色LEDに対し適度な数の頻度と配置でバックライト20内に設けるとよい。
【0092】
なお、バックライト20からは白色LEDの光のみ出力させて、これを表示光にも検出光にも利用し、カラーフィルタ層のセンサ領域に対応した部分に可視光を遮断または減衰させ、赤外領域や近赤外領域の光を有効に透過する波長選択性を持たせる構成でもよい。
また、受光素子の受光面に対しては検出光(反射光)を効率よく導く集光レンズアレイを形成して、被検出物側からの光の全受光量に閉める割合を高めることでS/N比を上げてもよい。
上記したS/N比向上の手段は、任意に複数組み合わせてもよい。
【0093】
[画素回路およびセンサ回路の構成例]
図12は、同一または異なる階層に形成される画素回路(画素PIXの等価回路)と近接センサ回路SCの回路図である。
近接センサ回路SCは、カラーフィルタによるノイズ低減(可視光遮断)を行う場合、例えば、画素配列において表示画素部間に設けられた遮光領域を利用して配置される。よって、表示に用いられる画素が配置された“表示領域DR”に対し、近接センサ回路SCが配置された領域を“センサ領域SR”と呼ぶ。表示領域DRとセンサ領域(遮光領域)SRは、外面10Sから見た平面内において、所定の割合で繰り返し、規則的に配置される。
【0094】
表示領域DRには、水平方向に延在する表示走査線DSCNと垂直方向に延在する映像信号線DSLとの交点付近に、薄膜トランジスタ(TFT)などからなるセレクトトランジスタSTが配置されている。セレクトトランジスタSTがFETからなる場合、そのゲートが表示走査線DSCNに接続され、そのドレインが映像信号線DSLに接続されている。セレクトトランジスタSTのソースは画素ごとの画素電極22に接続されている。画素電極22が隣接する液晶層(光変調層)6を駆動する電極であり、通常、透明電極材料から形成されている。
【0095】
例えば映像信号線DSLと直交する方向(水平方向)に延在するコモン駆動信号Vcomの供給線に、液晶層を挟んで画素電極22と対向する対向電極(駆動電極23)が設けられている。対向電極(駆動電極23)は通常、画素間に共通に設けられ、透明電極材料から形成されている。なお、画素電極22と駆動電極23の配置に限れば、図11(A)や図11(B)に示されているとおりである。
【0096】
このような構成の表示領域DRの各画素PIXにおいて、図1の表示Vドライバ5Vの制御により表示走査線DSCNを介して供給される表示走査信号に基づいてセレクトトランジスタSTがオンまたはオフする。セレクトトランジスタSTがオンすると、このときに、図1の表示Hドライバ5Hの制御により映像信号線DSLに供給されている映像信号PSに応じた画素電圧が画素電極22に画素電圧が印加され、これにより表示状態が設定される。
【0097】
なお、画素PIXに配置される補助容量Cauxと、その制御線である補助容量線CLは、液晶層25の等価容量が比較的小さい微細画素では必須であるが、これらは省略されることもある。補助容量線CLの制御は、表示走査線DSCNと同様、図1の表示Vドライバ5Vで行われる。
【0098】
表示領域DRに隣接するセンサ領域(遮光領域)SRには、例えばフォトダイオードなどからなる光センサ70(受光素子)が配置され、逆バイアスのため、そのカソード側に電源電圧Vddが供給されるようになっている。光センサ70のアノードであるフローティングディフュージョンFDには、リセットトランジスタRST、ゲートトランジスタGTおよびキャパシタCが接続されている。
【0099】
光センサ70のフローティングディフュージョンFDは、キャパシタCの大きさで蓄積容量が決まり、その蓄積電荷がリセットトランジスタRSTによって接地電位に放電(リセット)されるようになっている。リセットトランジスタRSTをオンからオフの状態にしてから、つぎにオンするまでの時間が電荷蓄積時間、つまり受光時間あるいは検出時間に相当する。
ゲートトランジスタGTはフローティングディフュージョンFDのオーバフロー量(蓄積電荷量)を制御するトランジスタであり、所定のゲート電圧Vgでバイアスされている。
【0100】
また、電源電圧Vddの供給線と、垂直方向に延在するセンサ線SLとの間に、アンプトランジスタATおよび読み出しトランジスタRTが直列接続されている。アンプトランジスタATのゲートがフローティングディフュージョンFDに接続されることで、その電位を増幅し、ソースフォロアで読み出しトランジスタRTのドレインに与える。
増幅後の電位は読み出しトランジスタRTがオンとなるタイミングでセンサ線SLに排出され、図1のセンサ読み出しHドライバ6H(検出回路DET)に入力される。
【0101】
また、リセットトランジスタRSTのオンとオフの動作は、図1のセンサ読み出しVドライバ6Vからリセット線RSTLにより供給されるリセット信号により制御される。読み出しトランジスタRTのオンとオフの動作は、センサ読み出しVドライバ6Vからリード制御線RCLにより供給されるリード制御信号により制御される。
【0102】
本方式では、バックライト側から照射された光が対象物に当たって戻ってきて、それをセンサ内蔵パネル52内の光センサで感知することにより、対象物を認識する。このとき、例えば、近接センサ回路SCのセンサ線SLから読み出されたセンサ出力信号は、検出回路DETに読み出され、サンプリングされて、サンプリング結果を所定の閾値Vtと比較することで近接検出判定がなされる。
【0103】
そのため、本方式では、対象物を液晶パネルに接触させる必要がなく、光センサの感度を調節しておくことにより、立体画像の反応させたい位置で、センサを反応させることが可能である。
なお、第1の実施の形態で述べた、望ましい要件を満たす感度特性が得られている場合は感度の調整は不要な場合がある。この要件を満たす感度特性が得られないような場合は、第1の実施の形態で述べたとおりのパラメータ調整で対応する。つまり、表示パネル10Pの構造パラメータ、特にパララックスバリア43とセンサ内蔵パネル52の少なくとも一方の支持体(ガラス基板等)の厚さを予め調整している。これに加え、光学式の場合、S/N比の向上によって検出限界の下限をさらに小さくして、上記望ましい要件を満たす感度特性が得られやすいように光学あるいはデバイスのパラメータを予め調整することでもよい。
【0104】
図13に、光センサ70の感度特性の例を示す。図13の横軸と縦軸は、図7の場合と基本的には同じである。但し、図13の縦軸は光センサ70自体の任意単位の感度Iであるため、構造パラメータの最適化、デバイスや光学パラメータの最適化を行わない場合には、S/N比の悪さから任意感度I=20が検出限界となる。しかし、この場合でも本方式の光センサは、外面10Sから約7[mm]まで検出対象物を検出することができている。
【0105】
前述した構造パラメータ(例えば基板厚)の最適化を行うと、検出限界をとなる感度(図13のI=20のポイント)を、例えば10以下に下げることができ、さらに高い位置での検出が可能である。また、デバイスパラメータや、波長選択フィルタや集光レンズを設けるなどによる光学パラメータの最適化によって、さらに高い位置での検出も可能である。
本方式の感度特性は、図7と比較すると、検出限界から外面位置までの広い範囲で感度の直線性に優れるという特徴がある。
【0106】
第1の実施と同様、パネルから離れたところに立体画像が結像し、それに光センサの反応位置を合わせておくことにより、その位置に指がきたときに反応して、例えば第1の実施の形態の図9と同様に、反応後の画像のように画面を切り替えることが可能になる。
また、本方式では、第1の実施の形態と同様、通常の2次元を表示することも、パララックスバリアパネルを通常の白表示にすることにより、可能となる。この場合、光センサは、駆動設定により液晶パネル表面の接触位置を検出することによって、通常の接触式タッチパネルとして使うことも可能である。
【0107】
図14に、光学式の場合の機能回路図を示す。
図14は、図5に対応するもので、その違いのみ説明すると、図5で設けられていたセンサ駆動検出部6Bがブロックとして省略されている。そのため、センサ読み出しHドライバ6H内の検出回路DETからの信号をサンプリングして、閾値Vtと比較判定する機能は制御回路7にもたせてある。
なお、この機能を受け持つセンサ駆動検出部6Bと同様な回路ブロックを図14に設けてもよい。ただし、主に光センサの駆動はセンサ読み出しHドライバ6Hで行うため、この回路ブロックが行う機能はセンサ検出(サンプリングと、Vt比較検出)のみとなる。
【0108】
ここで、他の実施の形態でも同様であるが、サンプリング後にホールドする機能があると検出タイミングの余裕ができるため望ましい。また、他の実施の形態でも同様であるが、サンプリング(およびホールド)に変えて、アナログ信号をデジタル信号に変換するものでもよい。
【0109】
<4.第4の実施の形態>
本実施の形態は、検出範囲の閾値Vtおよび表示画像の適応制御の例を開示する。この実施の形態は、第1〜第3の実施の形態と重複適用できるが、ここでは第3の実施の形態での例を説明する。
【0110】
図15は、適応制御の基本的な流れを示すフローチャートである。以下、図15の手順を、適宜、制御または処理の主体を図5および図14の機能ブロックで引用しつつ説明する。
ステップST1では、1画面に相当する映像信号PSが時系列で入力される。
【0111】
ステップST2では、制御回路7が3次元(3D)画像の表示モードであるか2次元(2D)画像の表示モードであるかを判断する。この判断が「NO」の場合はステップST2の監視ループがまわるが、「YES」の場合は次のステップST3でPV(パララックスバリア43)を、パララックスバリア駆動回路8Aがオンにする。
ステップST2の監視ループをまわすのは、画面の一部が3D画像の場合があり、その表示期間だけPVをオンとするためである。
【0112】
ステップST3では、PVのオンにより画面の一部または全部で3D画像表示が開始される。
【0113】
ステップST2で3D表示モードが判定されると同時に、ステップST4でボタンがあると、制御回路7が、そのボタンが3D表示であるかどうかを、映像信号PS内の視差情報(視差画素ピッチPの有無)によって判断する。ボタンが3D表示の場合は、つぎのステップST5で、制御回路7が、その位置の視差画素ピッチPに基づいて決まる3D表示高さHf付近に検出範囲の上限を設定する。この検出範囲の上限は、例えば図13に示す閾値Vtで規定され、そのときの高さ(ここでは一例として4[mm])以下で対象物の検出がされる。つまり、この例では0[mm]から4[mm]までが検出範囲である。
【0114】
検出範囲の上限を閾値Vtで決めるのは、対象物が遠くから近づくときの最初の検出ポイントが重要であり、そのポイントで閾値Vtを設定して、そこで閾値Vtとセンサ出力値(サンプリング値)との比較を行えば近接検出が可能だからである。
検出範囲の下限は極端な場合、持たなくてもよいが、検出感度特性に面内ばらつきがあること等を考慮して、ある一定幅の検出範囲とすることが望ましい。あるいは、検出範囲の下限は外面10Sで固定していてもよい。上記例で“0[mm]から4[mm]までの検出範囲”とは、この下限固定の場合である。
【0115】
つぎのステップST6では、視差情報(視差画素ピッチP)の変更、または、複数の視差画素ピッチPがあるかを制御回路7が判断する。
視差画素ピッチPの変更や複数の視差画素ピッチPがある場合、未だ閾値Vt設定していないボタンについて、3D表示高さHfごとに閾値Vtを設定する。
【0116】
視差画素ピッチPの変更や複数の視差画素ピッチPがない場合、つぎのステップST7で設定した閾値Vtを用いた近接判定が行われる。閾値Vtに達しないセンサ出力の場合は、“センサ反応なし”として、ステップST6のP監視とステップST7の検出とのループがまわる。したがって、指が外面10Sより遠くにある場合は、3D画像表示がされていても、このループが回った状態となる。
【0117】
閾値Vtに達したセンサ出力が制御回路7で認識されると、ステップST7で検出ありとなり、“センサ反応あり(状態S)”の検知信号が制御回路7から、画像処理回路等に出される。そのため、ステップST8で、ボタンに対応した次処理のフローが開始する。
【0118】
図15のフロー自体は、状態Sの検知信号の出力と同時にステップST1に戻り、次の画像の入力を待つか、表示画像に変更がかけられるのを待つ状態となる。
次の画像が入力され、あるいは、表示画像に変更がかかると、ステップST2からの、上記した一連の処理が再開される。
【0119】
一方、ステップST4にて、ボタンが3D表示でないと制御回路7が判断すると、ステップST5Aにて閾値Vtを外面付近(立体表示装置の最表面)付近に設定する。これによりPVがそのときだけオフされ、通常のタッチパネルと同じ2D画像でのボタン表示となる。
【0120】
つぎのステップST7Aでは、ステップST7と同様な閾値Vtを用いた検出が行われ、検出されない場合は、ステップST7Aが閾値Vtを超えるセンサ出力の待ち状態に入る。
検出後は、状態Sの検知信号の出力を契機にステップST8Aの次処理にフローが移行し、図15のフロー自体はステップST1に戻される。
【0121】
以上の検出判定の制御によれば、殆どの判断や処理が制御回路7で行われるため、ステップST2で3D表示モードに入ってから、ステップST8で次処理への移行するまでCPU等が所定のプログラムシーケンスを実行するわずかな時間である。そのため、処理時間は極めて短い。
その上、検出範囲の高さ方向の上限が3D表示高さHf付近に設定されている。
以上の理由から、ユーザがボタンに接触したと同時か僅かな遅れで、次処理が開始され、画面変更としてユーザが認識されるまでの応答性が高い立体画像表示装置が実現される。
また、視差画素ピッチPの変更があっても、それに追従して検出判定部6内の制御回路7が検出範囲(閾値Vt)を変更するため、シームレスな処理が可能である。
【0122】
なお、図15の制御でステップST6での待ち状態が長い場合等にあっては、検出判定部(制御回路7)が、閾値Vtを、所定の範囲内で最小値から被検出物が検知されるまで漸増させる動作を繰り返すことにより、より早いタイミングでの検出を可能としてもよい。
【0123】
図16に、1つの3D表示ボタンで視差情報が変化する場合を示す。
図16(A)および図16(B)に示す左右の元画像を合成されてできる立体画像は、その視差情報(視差画素ピッチP)の大きさに応じて、3D表示高さHfも変化する。
例えば、アプリケーションが切り替わる場合など、ある画面では、視差画素ピッチPが小さいが、その後の画面では視差画素ピッチPが変化することがある。その場合、一般には3D表示高さHfも変化するが、検出範囲が固定であると、あるアプリケーションでは応答性がよいが、他のアプリケーションでは応答性が悪い事態が発生する。
【0124】
図15のフローではステップST6で視差画素ピッチPの変更が監視されるため、このような応答性のばらつきが解消される。
【0125】
図17に、複数のボタンで異なる3D表示高さHfが設定されている場合の操作前後の模式図を示す。また、図18にボタンごとの閾値の設定範囲の例と、感度曲線上の閾値の設定例とを示す。
3D表示高さHf このような例としては、シュミュレータやゲーム等のソフトで、4つの位置に異なった画像を表示させ、それをクリックすることにより、画像が切り替わっていくようなゲーム等が考えられる。クリックされた画像は2D表示ボタンになるか、3D表示のまま画像が変わるか、3D表示でその高さがさらに変わる等してユーザはボタン操作が正しく行われたことを知ることができる。
【0126】
このようなアプリケーションでは、操作から応答までの時間が長いと、短時間で4つのボタンの結像状態を切り替えるアプリケーション自体が意味をなさない。
本発明の適用で個々の応答時間が短縮されるため、このような表示時間差を利用したアプリケーションの実現が可能となる。
【0127】
なお、図19の模式図と、図20の感度曲線上の閾値設定例のように、同じ3D表示高さHfのボタンでも、一方(ボタンA)は3D画像に変更し、他方(ボタンC)のみ2D画像を維持する制御も可能である。
【0128】
<4.変形例1>
図21のように、例えば外付けの近接センサパネル60Pを有する場合に、液晶パネル(光変調パネル51)の前面にレンチキュラーレンズ80が取り付けられ、それにより、立体画像表示を可能にしてもよい。レンチキュラーレンズのさらに前方に静電容量式の近接センサパネル60Pが配置されている。
【0129】
図22に、このレンチキュラーレンズと液晶表示パネルの光学構成図を示す。
図22に示すように、レンチキュラーレンズ80により、左右の画像が左右の眼(R)と眼(L)に別々に入り、画像を立体として認識することが可能になる。
【0130】
<5.変形例2>
上述した第1〜第4の実施の形態および変形例1では、画像表示パネルの前に立体画像用光学部品、センサが配置されるため、画像表示パネルは、この実施例では液晶表示パネルであるが、有機ELやプラズマ表示素子であってもよい。
【0131】
<6.電子機器への本発明の適用例>
以上説明した第1〜第4の実施の形態に係る立体画像表示装置は、様々な電子機器、例えば、デジタルカメラ、ノート型パーソナルコンピュータ、携帯電話等の携帯端末装置、ビデオカメラなど、あらゆる分野の電子機器の表示装置に適用することが可能である。以下に、本実施の形態が適用される電子機器の一例について説明する。
【0132】
図23は、電子機器の構成を表すブロック図である。
図23に図解する電子機器1000は、I/Oディスプレイパネル(表示パネル10P)と、バックライト20と、表示ドライブ回路1100(表示駆動回路5Aに相当)と、受光ドライブ回路1200(検出判定部6)と、を有する。以上の構成は、従前の実施の形態でも必須の構成である。
電子機器1000は、画像処理部1300と、アプリケーションプログラム実行部1400とを、さらに有する。
【0133】
I/Oディスプレイパネル(表示パネル10P)は、複数の画素が全面に渡ってマトリクス状に配置された液晶パネル(LCD(Liquid Crystal Display))からなり、線順次動作をしながら表示データに基づく所定の図形や文字などの画像を表示する機能(表示機能)を有する。また、I/Oディスプレイパネルは、その外面10Sに接触または近接する物体を撮像する機能(撮像機能)を有する。
【0134】
表示ドライブ回路1100は、I/Oディスプレイパネル(表示パネル10P)において表示データに基づく画像が表示されるように、I/Oディスプレイパネルの駆動を行う(線順次動作の駆動を行う)回路である。
【0135】
受光ドライブ回路1200は、I/Oディスプレイパネル(表示パネル10P)において受光データが得られるように、指先などの被検出物を検出し、判定する回路である。
上記表示ドライブ回路1100が線順次で画素駆動を行って液晶層(光変調層)を駆動するのに対し、受光ドライブ回路1200はセンサアレイを線順次で駆動する回路である。なお、センサからのセンサ出力を、例えばフレーム単位でフレームメモリ(FM)に蓄積し、物体の大きさ等を判別してもよい。
【0136】
画像処理部1300は、受光ドライブ回路1200から出力される検出結果や検出画像に基づいて所定の画像処理(演算処理)を行う。これにより、画像処理部1300は、I/Oディスプレイパネルに接触または近接する物体に関する情報(位置座標データ、物体の形状や大きさに関するデータなど)を検出し、取得する。なお、この検出判定の処理については、第1および第4の実施の形態ですでに説明したため、ここで説明は省略する。
【0137】
アプリケーションプログラム実行部1400は、画像処理部1300による検知結果に基づいて所定のアプリケーションソフトウエアウエアに応じた処理を実行する回路である。
【0138】
アプリケーションソフトウエアに応じた処理には、2D画像と3D画像の切り替え、表示ボタンを高さ検出結果に応じて大きくし、あるいは小さくする処理、ボタンそのものを変更する処理などが例示できる。
また、本発明の適用により複数の高さでの操作検出ができる。このため、高さ範囲を数段階に区分して、どの区分で指先などの被検出物が操作を行ったかに応じて、アプリケーションソフトウエアに、単なるボタン切り替えなどの2値情報以上の情報量をもつ多値情報を入力することもできる。よって、動作の程度、例えばゲームなどのアクションの程度などを指先の高さで制御するアプリケーションソフトウエアの操作への適用も可能である。
なお、簡単な例では、指先などの被検出物の位置座標(高さを含む)を表示データに含むようにし、I/Oディスプレイパネル10P上に表示させる処理も例示できる。
【0139】
ボタン表示や位置データなどを含み、アプリケーションプログラム実行部1400で発生する表示データは、表示ドライブ回路1100へ供給される。
【0140】
図24は、本発明が適用されるテレビを示す斜視図である。
本適用例に係るテレビは、フロントパネル120やフィルターガラス130等から構成される映像表示画面部110を含む。映像表示画面部110として第2〜第4の本実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0141】
図25は、本発明が適用されるデジタルカメラを示す斜視図であり、(A)は表側から見た斜視図、(B)は裏側から見た斜視図である。
本適用例に係るデジタルカメラは、フラッシュ用の発光部111、表示部112、メニュースイッチ113、シャッターボタン114等を含む。表示部112として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0142】
図26は、本発明が適用されるノート型パーソナルコンピュータを示す斜視図である。
本適用例に係るノート型パーソナルコンピュータは、本体121に、文字等を入力するとき操作されるキーボード122、画像を表示する表示部123等を含む。表示部123として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0143】
図27は、本発明が適用されるビデオカメラを示す斜視図である。
本適用例に係るビデオカメラは、本体部131、前方を向いた側面に被写体撮影用のレンズ132、撮影時のスタート・ストップスイッチ133、表示部134等を含む。表示部134として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0144】
図28は、本発明が適用される携帯端末装置、例えば携帯電話機を示す図であり、(A)は開いた状態での正面図、(B)はその側面図、(C)は閉じた状態での正面図、(D)は左側面図、(E)は右側面図、(F)は上面図、(G)は下面図である。
本適用例に係る携帯電話機は、上側筐体141、下側筐体142、連結部(ここではヒンジ部)143、ディスプレイ144、サブディスプレイ145、ピクチャーライト146、カメラ147等を含む。ディスプレイ144やサブディスプレイ145として第2〜第4の本実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0145】
以上説明したように、本発明のセンサ機能付の立体画像表示装置は、立体画像が結像する位置でセンサが反応することにより、立体画像という実際に実物がない情報入力手段であっても、違和感を緩和して反応させることができる。また、大きさについても従来のタッチパネル付液晶表示装置とあまり大きな差はないため、携帯機器に使用することも可能である。また、2次元と3次元画像の切り替えも可能であり、通常の2次元画像時に通常のタッチパネルとして使うことも可能である。
【0146】
以上の説明では、立体表示装置を主として説明するが、この説明は本発明に関わる物体近接検出装置の実施の形態も兼ねる。
ここで物体近接検出装置は、立体表示装置では必須の立体画像発生部の構成が任意である点で異なる。つまり、物体近接検出装置は、実際に立体画像を表示する必要はなく、視差情報が入力されていれば足りる。そして、物体近接検出装置は、立体表示発生装置と同様に、入力される視差情報に基づいて設定された外面との距離(高さ)で被検出物が外面に近接したことを検出する近接(プロキシミティ)センサ部を有する。
【符号の説明】
【0147】
5H…表示Hドライバ、5V…表示Vドライバ、6…検出判定部、6H…センサ読み出しHドライバ、6V…センサ読み出しVドライバ、7…制御回路、8…PV制御部、10P…表示パネル、10S…外面、20…バックライト、22…画素電極、23…駆動電極、24…カラーフィルタ、25…液晶層、30…TFT基板、31…対向基板、40…第1偏光板、41…第3偏光板、42…光制御層、43…パララックスバリア、44…第1PV基板、45…第2PV基板、46…スイッチ液晶層、50…第2偏光板、51…光変調パネル、52…センサ内蔵パネル、70…光センサ、80…レンチキュラーレンズ、PS…映像信号、DE…駆動電極
【技術分野】
【0001】
本発明は、立体画像表示が可能であり、さらに、立体画像上での操作等を検出するための近接センサ機能を有する立体画像表示装置と、当該立体画像表示の機能をもつ電子機器とに関する。また、本発明は、物体の近接検出が可能な物体近接検出装置に関する。
【背景技術】
【0002】
近年、モバイル用途の液晶表示装置において、入力機能として、タッチパネルを用いるものが多くなってきている。液晶表示装置の前面に静電容量式、抵抗膜式あるいは光学式のタッチパネルを配置するものである。
【0003】
また、立体画像表示するものも、モバイル用途として、一部、製品化されている。視差を使って表示を行う場合、遮光部を設ける方式や、レンチキュラーレンズを用いる方式等がある。視差を使って立体画像を表示する技術については、例えば特許文献1に開示されている。
【0004】
立体画像表示を行って、その画像情報に従ってタッチパネルのように情報を入力する操作機器についても、検討が行われている(例えば、特許文献2〜4参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3101521号公報
【特許文献2】特開2004−272354号公報
【特許文献3】特開平8−161987号公報
【特許文献4】国際公開第WO06/035816号
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献2に記載の発明は、立体表示した画像に含まれるボタンの操作に反応するような構成を有し、ボタンの操作に反応して表示内容を切り替えるものである。立体表示ボタンの操作の検出を行うセンサは静電容量式が開示され、「操作による横線と縦線の静電容量変化を検出する」とだけ記載されている。
【0007】
このため、実際にボタンを含む立体画像が出力される外面(保護層の際表面)にユーザが指等で接触しないと反応しない構成も含まれ、その場合、操作に違和感がある。つまり、立体画像は外面から離れた空間に結像されているため、ユーザが立体表示ボタンに触れたと感じてから、さらにボタンを押し込まないと実際に操作が認識されない。
【0008】
これに対し、上記特許文献2および特許文献3に記載の立体画像表示装置は、立体画像の表示ボタン等を操作するときに、立体画像表示位置でボタン操作がセンシングできるため、上記特許文献1のような操作上の違和感がない。
【0009】
しかしながら、上記特許文献2および特許文献3に記載の立体画像表示装置では、センサは、立体画像の結像位置の周囲に配置された発光体と受光体等からなり、発光体と受光体を保持する枠状の構成が必要である。このため、この立体画像表示装置は、装置自体が立体的で大きく、特に薄型化が困難なため、小型の電子機器への搭載は不可能に近い。
【0010】
本発明は、立体画像の結像位置での操作検出が可能であり、かつ薄型化が容易な構造の立体画像表示装置と、その立体画像表示装置を搭載することで小型化、薄型化にできる電子機器とを提供するものである。
また、本発明は、薄型化が容易な構造を有し、操作上の違和感がなく物体の近接検出を可能とする物体近接検出装置を提供するものである。
【課題を解決するための手段】
【0011】
本発明に関わる立体画像表示装置は、被検出物が接近する外面と、立体画像発生部と、近接(プロキシミティ)センサ部と、を有する。
前記立体画像発生部は、入力される映像信号から3次元の立体画像を発生する。
前記近接センサ部は、前記外面の、前記被検出物が接近する側と反対の側に設けられ、前記映像信号に含まれる視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する。
本発明では好適に、前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する。
【0012】
上記構成によれば、近接センサ部は、接触の検出も可能に構成できるが、物体(被検出物)が外面に接触せずとも近接しただけで物体の検出を行う。このとき、近接センサ部は、入力される映像信号に含まれる視差情報に基づいて設定される高さ(外面からの距離)で、被検出物が外面に近接したことを検出する。この高さの位置は、視差情報に基づいて立体画像が結像する高さ(外面からの距離)と同じ位置とすることができる。この場合、好適には、近接センサ部は、視差情報に基づいて立体画像が結像する高さと同じ位置、または当該高さより外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有することが望ましい。視差情報に基づいて立体画像が結像する高さと同じ位置に検出限界の下限をもつ場合、その位置に指等の被検出物がきた時点で、その近接が検出される。また、検出限界の下限が、さらに外面寄りの場合は検出範囲が広く、その分、検出の確度が高い。
【0013】
本発明に関わる物体近接検出装置は、上記外面と上記近接センサ部とを有する。
本発明に関わる電子機器は、上記外面、上記立体画像発生部および上記近接センサ部を有し、さらに画像処理部を有する。
前記画像処理部は、前記近接センサ部の検出結果に基づいて画像処理を実行し、前記画像発生部に入力する前記映像信号、前記光学部品に入力する前記視差情報の少なくとも一方を変更する。
【0014】
上記構成の電子機器では、近接センサ部の検出結果をアプリケーション等で規定される表示変更等の契機とする。その際、上記立体画像表示装置と同様に、入力される映像信号に含まれる視差情報に基づいて設定される高さ(外面からの距離)で、被検出物が外面に近接したことを検出する。このため、当該電子機器では、操作上の違和感がなく、応答性も高い(操作してから表示変更が行われるまでの時間が短い)。
【発明の効果】
【0015】
本発明によれば、立体画像の結像位置での操作検出が可能であり、かつ薄型化が容易な構造の立体画像表示装置と、その立体画像表示装置を搭載することで小型化、薄型化にできる電子機器とを提供することができる。
また、本発明によれば、薄型化が容易な構造を有し、操作上の違和感がなく物体の近接検出を可能とする物体近接検出装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】第1の実施の形態に関わる立体画像表示パネルが有する表示パネルの構成例を示すブロック図である。
【図2】表示部の断面構造図である。
【図3】近接センサパネルの概略的な平面図とパネル内部の断面構造図である。
【図4】パララックスバリアの概略的な断面構造図である。
【図5】表示パネル内の周辺回路と、それ以外の制御回路とを機能ブロックに分けて示す図(機能ブロック図)である。
【図6】立体画像の結像および視認の条件を説明するための図である。
【図7】第1の実施の形態に関わる静電容量式の近接センサパネルの物体検出の感度特性のグラフである。
【図8】立体画像表示用の画像の例を示す図である。
【図9】ボタン操作の例を示す模式図である。
【図10】第2の実施の形態に関わる表示パネルの概略的な断面図である。
【図11】図10に示す光変調パネルの平面と断面をさらに詳細に示す図である。
【図12】第3の実施の形態に関わる画素回路とセンサ回路の回路図である。
【図13】第3の実施の形態に関わる光学式の近接センサパネルの物体検出の感度特性のグラフである。
【図14】光学式の場合の機能回路図である。
【図15】第4の実施の形態に関わる、適応制御の基本的な流れを示すフローチャートである。
【図16】1つの3D表示ボタンで視差情報が変化する場合の模式図である。
【図17】複数のボタンで異なる結像高さが設定されている場合の操作前後の模式図である。
【図18】ボタンごとの閾値の設定範囲の例と、感度曲線上の閾値の設定例とを示す図である。
【図19】同じ結像高さでも異なる画像への変更がされる場合の模式図である。
【図20】同じ結像高さでも異なる画像への変更がされる場合の閾値設定を示す感度特性のグラフである。
【図21】変形例1を示す概略断面図である。
【図22】変形例1の作用を説明するための断面図である。
【図23】電子機器の構成を表すブロック図である。
【図24】テレビの斜視図である。
【図25】デジタルカメラの斜視図である。
【図26】ノート型パーソナルコンピュータの斜視図である。
【図27】ビデオカメラの斜視図である。
【図28】携帯電話機の開閉図、平面図、側面図、上面図および下面図である。
【発明を実施するための形態】
【0017】
本発明の実施の形態を、立体表示装置としては主に液晶表示装置を例として図面を参照して、以下の順で説明する。
1.第1の実施の形態:静電容量式の外付け近接センサパネルを有する液晶表示方式の立体画像表示装置。
2.第2の実施の形態:静電容量式の近接センサを内蔵する液晶表示方式の立体画像表示装置。
3.第3の実施の形態:光学式の近接センサ(光センサアレイ)を内蔵する液晶表示方式の立体画像表示装置。
4.第4の実施の形態:検出範囲の閾値および表示画像の適応制御の例。この実施の形態は、第1〜第3の実施の形態と重複適用できるが、ここでは第3の実施の形態での例を開示する。
5.変形例1:レンチキュラーレンズの光学部品への適用例。
6.変形例2:その他の変形例。
7.電子機器への本発明の適用例。
【0018】
<1.第1の実施の形態>
[表示パネル全体構成]
図1は、第1の実施の形態に関わる立体画像表示パネルが有する表示パネルの構成例を示すブロック図である。なお、図1に関し、図示されない表示方式の違い、近接センサの方式や内蔵形態の違いがあるが、図示されている構成自体が他の実施の形態に関わる立体画像表示装置においても共通する。
【0019】
図1に図解する表示パネル10Pは、静電容量式の近接センサ部を付加する外付け式の近接センサパネルが表面に貼られた表示部10DPと、その周辺回路とを有する。表示パネル10Pの最表面が、本発明の「被検出物(指先やスタイラスペン等)が接近する外面10S」である。
周辺回路は、表示Hドライバ(DH.DRV)5Hと、表示Vドライバ(DV.DRV)5Vと、センサ読み出しHドライバ(SRH.DRV)6Hと、センサ読み出しVドライバ(SRH.DRV)6Vと、を有する。
【0020】
表示Hドライバ5Hおよび表示Vドライバ5Vは、入力される映像信号PSおよび制御クロック(CLK)に基づいて、表示部10DP内の各画素の液晶素子を線順次駆動する回路である。
【0021】
センサ読み出しVドライバ6Vおよびセンサ読み出しHドライバ6Hは、表示部10DP内のセンサ領域に配置された近接センサ部を駆動し、センサ出力信号を取得する回路である。
【0022】
[表示部の断面構造]
図2に、表示部の断面構造図を示す。
図2に図解する表示部10DPは、外面10S側から順に、近接センサパネル60P、画像発生部としての光変調パネル51、光学部品としてのパララックスバリア(PV)43、および、バックライト20が配設されている。
【0023】
バックライト20は、詳細は図示しないが、導光板、LED等の光源、光源駆動部、反射シート、プリズムシートなどを一体に組み立てた画像ディスプレイ専用の照明装置である。
【0024】
光変調パネル51は、バックライト20側のTFT基板30と、外面10S側の対向基板31とを有する。TFT基板30と対向基板31には不図示の様々な電極や素子および光学機能層が適宜絶縁され、適宜平坦化されて形成される。
【0025】
より詳細には、TFT基板30の外面10S側の主面には、画素電極や駆動素子であるTFT(薄膜トランジスタ)が画素ごとの繰り返しパターンにて形成されている。また、インプレーンスイッチング(IPS)の表示モードが採用される場合、画素電極の下層に平坦化膜に埋め込まれて対向電極(共通電極ともいう)が形成される。画素電極やTFTが配置される層の上層に、第1配向膜が形成されている。
【0026】
一方、対向基板31の一方の面(裏面側)に、カラーフィルタと、平坦化膜と、第2配向膜とが形成されている。
【0027】
TFT基板30は、スペーサ(不図示)を介して内部空間を形成するように対向基板31と貼り合わされている。このとき、画素電極やTFTおよび第1配向膜を形成したTFT基板30の面と、カラーフィルタや第2配向膜を形成した対向基板31の面とが、対向するように両基板が貼り合わされる。
スペーサが形成されていない箇所から、2枚の基板間の内部空間に液晶が注入されている。その後、液晶の注入箇所が閉じられると、2枚の基板が貼り合わされたセル内に液晶が封入され、これにより液晶層が形成されている。液晶層は、第1配向膜と第2配向膜に接しているため、それら配向膜のラビングの向きで液晶分子の配向方向が決められる。
【0028】
このように形成された液晶層に対し、画素ごとの画素電極と、画素間で共通な対向電極(共通電極)とが、層厚方向に隣接配置される。この2種類の電極は、液晶層に電圧を印加するための電極である。液晶層を挟んで2つの電極が配置される場合(縦方向の駆動モード)と、TFT基板30側に2つの電極が2層配置される場合(横方向の駆動モード、例えばIPSモード)とがある。
IPSモードの場合、画素電極と対向電極(共通電極)は絶縁分離されているが、下層側の対向電極は、上層側で液晶層に接する画素電極のパターンの間から液晶に電気的な作用を与える。このため、横方向の駆動モードでは電界の向きが横方向となる。これに対し、2つの電極が液晶層を、その厚さ方向から挟んで配置される場合は、電界の向きが縦方向(厚さ方向)となる。
【0029】
いずれの駆動モード仕様で電極が配置されている場合でも、図1の表示Hドライバ5Hおよび表示Vドライバ5Vの駆動の制御時に、2つの電極によって液晶層に対し電圧をマトリクスに駆動可能である。このため、液晶層は、その透過を光学的に変調する機能層(光変調層)として機能する。液晶層は、図1の表示Hドライバ5Hに与えられる映像信号PSに基づき、画素電極に印加される電圧の大きさに応じて階調表示を行う。
【0030】
図2に示すように、TFT基板30の他方の主面(裏面)には、第1偏光板40が貼られている。第1偏光板40と対をなす第2偏光板50が、対向基板31の外面10S側の面に貼られている。
【0031】
第2偏光板50と外面10Sとの間に、近接センサパネル60Pが配置されている。近接センサパネル60Pの光変調パネル51と反対側の面が保護層に覆われ、その最表面が、外部から画像を視認し、また被検出物が接近する外面10Sとなっている。
【0032】
なお、図2においてパララックスバリア43の構造の詳細は、更に詳細な図を参照して後述する。
【0033】
[近接センサパネルの構成]
図3(A)に、近接センサパネルの概略的な平面図を示す。図3(A)は、図2の外面10S側からパネル内部を透視した図である。また、図3(B)に、図3(A)のA−A線に沿った概略断面図を示す。
図3(B)に図解するように、近接センサパネル60Pは、第1センサ基板61と、第2センサ基板62との間に駆動電極DEmが配置されている。第2センサ基板62の駆動電極DEm側と反対の面、すなわち外面側の面に、n本のセンサ線SL1〜SLnが配置されている。n本のセンサ線SL1〜SLnは、被検出物の近接に応答して電位が変化する検出電極として機能する。
【0034】
n本のセンサ線SL1〜SLnは、図3(A)に示すようにy方向に細長い複数の配線から形成されている。以下、センサ線SL1〜SLnの任意の1本を、センサ線SLi(i=1,2,3,…,n)と表記する。
【0035】
駆動電極は、図3(A)に示すように、x方向に長い帯状に形成され、y方向に同一ピッチでm個配置されている。m個の駆動電極DEj(j=1,2,3,…,m)は、n本のセンサ線SL1〜SLnと異なる方向に配置されている。本例では、駆動電極DEjとセンサ線SLiが直交して配置されている。
【0036】
図3(B)に示す第1センサ基板61と第2センサ基板62の材質を限定しない。ただし、光透過性の材質から2つのセンサ基板を形成する必要がある。また、n本のセンサ線SL1〜SLnの各々(SLi)がm個の駆動電極DE1〜DEmの各々(DEj)と容量結合している必要がある。そのため当該容量結合を所定の強さとするという観点から、第2センサ基板62の厚さや材質が規定されている。その観点では第2センサ基板62を省略し、絶縁物をn本のセンサ線SL1〜SLnとm個の駆動電極DE1〜DEmとの間に介在させてもよい。
【0037】
図3(A)に示すように、m個の駆動電極DE1〜DEmの一方端に接続されてセンサ読み出しVドライバ6Vが配置されている。また、n本のセンサ線SL1〜SLnの一方端に接続されて検出判定部6が配置されている。
センサ読み出しVドライバ6Vは近接センサパネル60P内に形成されるが、検出判定部6の一部の機能、特に読み出されたセンサ出力信号から被検出物の有無や位置を判定する機能は、近接センサパネル60Pの外部にもたせてもよい。
【0038】
センサ読み出しVドライバ6Vは、駆動電極ごとに交流信号源ASを有する。センサ読み出しVドライバ6Vは、活性化する交流信号源ASを、図3(A)のセンサ読み出しVドライバ6Vのブロック内で矢印により示す方向(走査方向)内で切り替える回路である。あるいは、センサ読み出しVドライバ6Vは、1つの交流信号源ASを有し、この1つの交流信号源ASと、m個の駆動電極内の1つの駆動電極DEjとの接続を上記走査方向内で切り替える回路である。
センサ読み出しVドライバ6Vは、その外部(例えば不図示のCPUやパルス発生回路等)から与えられる制御信号に基づいて、走査のアルゴリズムにしたがって制御されるとしてもよい。
【0039】
なお、本実施の形態では、駆動電極とセンサ線との直交配置は必須ではなく、各センサ線と各駆動電極との容量結合が、検出面内で均一またはほぼ均一となれば、両者の形状や配置を特に限定する必要がない。
図3(A)のように検出面の直交する2つの辺の一方の側からセンサ線を引き出して検出判定部6に接続し、上記2つの辺のもう片方の側から駆動電極を引き出してセンサ読み出しVドライバ6Vに接続する。すると、検出判定部6とセンサ読み出しVドライバ6Vの配置が行いやすい。そのため駆動電極とセンサ線との直交配置は望ましいが、これに限定することが必須というわけではない。
【0040】
[パララックスバリアの断面構造および動作]
図4に、パララックスバリアの概略的な断面構造を示す。
図解するパララックスバリア43は、図2にも示すように、光変調パネル51(図2)の偏光板と兼用する第1偏光板40と、第3偏光板41と、第1偏光板40と第3偏光板41の間に配設された光制御層42と、を有する。
【0041】
光制御層42は、例えばスイッチ液晶として機能し、第1PV基板44と、第2PV基板45との間にスイッチ液晶層46が封入された構造を有する。
スイッチ液晶層46には、図2のバックライト20からの平面状の光が第3偏光板41で直線偏光となった後に入射される。スイッチ液晶層46からの光は、第1偏光板40で、スイッチ液晶の状態に応じて吸収または透過される。スイッチ液晶層46は、入射光を、第3偏光板41および第1偏光板40との相互作用で部分的に遮光する機能を持つ。そのためには、スイッチ液晶層46に印加する電圧を部分的にオンまたはオフする必要がある。
この電圧のスイッチングは、第1PV基板44と第2PV基板45の対向面の一方と他方に形成されたPV駆動電極(不図示)と、PV共通電極(不図示)とに、電位差の有無(または大小)を発生させることにより制御される。例えば、PV駆動電極が画素の列(画素カラム)ごとに形成され、これが行方向に画素の配列に対応したピッチで配置される。PV共通電極は、例えば1枚の平板状に形成される。PV駆動電極とPV共通電極はいずれも、光透過性が高い透明電極材料から形成される。
また、PV駆動電極とPV共通電極はいずれもライン状に形成されており、縦横(ランドスケープ、ポートレート)どちらでもストライプを形成することができる。このため、後述するように表示画像を90度回転する前後のどちらでも3D表示が可能になる。
【0042】
上記構成と、液晶印加電圧の画素ピッチを最小単位としたスイッチングにより、図4(A)に示す視差なしに対応した面状光の出力状態と、図4(B)に示す視差ありに対応した離散的な平行ストライプ光の出力状態とが切り替えられる。平行ストライプ光の出力状態において、光を遮光する部分を「視差バリア」と呼び、光を透過する部分を「スリット」と呼ぶ。
2次元画像を表示する図4(A)の場合は、パネル全面が白状態となるため、透過率の大きな低下はない。一方、3次元画像を表示する図4(B)の場合は、液晶がライン状にスイッチングし、スリットで分離されたストライプ状の視差バリアが形成される。
【0043】
液晶印加電圧のスイッチングは、「表示制御部」により制御される。表示制御部が行う制御には、スイッチングを行う場合(図4(B))と行わない場合(図4(A))の制御を含む。スイッチングを行わない図4(A)の場合、図2の光変調パネル51には、視差情報を含まない映像信号PSの供給により2次元画像が表示される2次元画像表示モードとなる。一方、スイッチングを行う図4(B)の場合、視差情報を含む映像信号PSの供給と、この光の液晶スイッチングとの相互作用により、視差をもつ3次元画像が発生する3次元画像の表示モードとなる。
表示制御部は、2次元画像と3次元画像の切り替えは全画面で双方向に行うことができ、また、画面の一部で行うこともできる。つまり、2次元表示画像の一部を3次元画像に切り替え、逆に、3次元表示画像の一部を2次元画像に切り替えることができる。
【0044】
更に、表示制御部は、3次元画像の表示モードにおいて、視差が発生する方向を90度回転することができる。具体的に、表示制御部は、列方向に長い平行ストライプ光から、行方向に長い平行ストライプ光へ変更することにより、視差発生の方向を90度回転する。これは、立体表示装置を視認する向きをユーザが90度回転させることに対応して、両目の離間方向に視差発生の方向を合わせるためである。
【0045】
なお、スイッチ液晶層46の表示モードとしては、透過率の高いツイストネマチックモードが望ましいが、垂直配向モードやインプレーンスイッチングモード等、白黒が切り替えできれば、他のどの表示モードでも構わない。
また、電極構造としては、単純マトリクスで問題ないが、一部のみ3D表示にしてその位置も変えるといった場合は、アクティブマトリクスの白黒パネルを使うことも可能である。
【0046】
[立体画像表示と近接検出のための回路]
上記構成を前提とした立体画像表示と近接検出の動作を説明するが、その制御を行う回路を、最初に説明する。
【0047】
図5は、本実施の形態に関わる立体画像表示装置内に設けられ、図1に示す表示パネル10P内の周辺回路と、それ以外の制御回路とを機能ブロックに分けて示す図である。
図5においては平面図を3つ並べているが、これは1つの表示パネル10P内で、バックライト20以外の3つの機能階層を示すものである。
センサ領域SRと表記された機能層は、図2の近接センサパネル60Pに対応する。また、ディスプレイ領域DRが光変調パネル51に対応し、パララックスバリア領域PVRがパララックスバリア43に対応する。
【0048】
この3つの領域(機能階層)を駆動・制御する回路としては、表示Hドライバ5Hと表示Vドライバ5Vからなる表示駆動回路5Aと、センサ駆動検出部6Bと、CPU等の制御回路7と、パララックスバリア駆動回路(PV.DRV)8Aとが存在する。
【0049】
センサ駆動検出部6Bは、図1のセンサ読み出しHドライバ6Hとセンサ読み出しVドライバ6Vからなるセンサ駆動回路6Aの機能を含む。本例では、センサ駆動回路6Aと制御回路7により、図3(A)にも示す検出判定部6が構成されている。
【0050】
例えば、パララックスバリア駆動回路8Aと制御回路7によりPV制御部8が構成され、さらに、PV制御部8と表示駆動回路5Aにより、本発明の「表示制御部」の一例が構成される。
表示制御部は、パララックスバリアの動作で既に説明した各種制御をPV制御部8で行い、光変調パネル51の駆動を表示駆動回路5Aで行う。
【0051】
[立体画像表示動作]
図6は、立体画像の結像および視認の条件を説明するための図である。
入力された映像信号PSに基づく表示制御部の制御を受けて、右目のための画像が離散的な画素(以下、R画素PIX(R))に表示され、左目のための画像が他の離散的な画素(以下、L画素PIX(L))に表示される。同一の絵素に対応するR画素PIX(R)とL画素PIX(L)との視差発生方向の画素単位のピッチを、図6では“視差画素ピッチP”で表している。図6の例では視差画素ピッチPが光変調パネル51の画素のピッチと対応しており、1画素ごとに、R,L,R,L,…と左右の画像が繰り返される。そのため、もとの画像について、解像度は、半分になる。同一の絵素に対応するR画素PIX(R)を通る光とL画素PIX(L)を通る光は、それぞれ観察者の右目と左目に入る。このとき観察者は、外面10Sから所定の距離で画像があたかも結像して見える。以下、この3D表示画像の仮想的な像位置(外面10Sから距離)を“3D表示高さHf”と呼ぶ。
視差画像ピッチが、いわゆる画像のずれ量に相当し、3D表示高さは、いわゆる3D画像の飛び出し量に相当する。
【0052】
光変調パネル51の画素ピッチと、パララックスバリアが形成するバリアのラインのピッチは完全に一致させると正面中央しか視差が合わない。そのため、パララックスバリアのピッチは、視差を合わせるために、光変調パネルの画素ピッチに比べて若干大きくなっている。
【0053】
図6中、光変調パネル51の液晶層からパララックスバリア43の液晶層(スイッチ液晶層46)までの距離を“t”で表し、一般的な人の両目の離間距離を“e”で表す。この場合に、p:t=e:(t+d’)で規定される“d’”が表示パネル10Pの画像光経路の平均屈折率(ガラスの屈折率が支配的)と空気の屈折率とに差がない場合の眼の位置を表している。
主にガラスと空気の屈折率差を用いて実際の視認で最適な位置を概算すると、立体画像の視認位置dは、おおよそ、d≒d’/1.5で求めることができる。
なお、液晶表示パネルの前方側、後方側で交互に結合するが、本方式では正面から見た場合、前方で結合するようにパララックスバリアを配置する。
また、パララックスバリアパネルの位置は光変調パネルとバックライトの間としたが、これは、順番が逆でもよく、バックライト→光変調パネル→パララックスバリアパネルの順番でもよい。
【0054】
3D表示高さHfは、光の拡散度等、他のパラメータにも依存するが、これらのパラメータを一定とした場合、主に視差画素ピッチPで制御できる。つまり、視差画素ピッチPが大きければそれだけ3D表示高さHfも大きくなる。
画素が細かいパネルを使う場合は、外面10Sからの距離が数[mm]〜数十[mm]の実用的な範囲に3D表示高さHfを収めるには、ガラス厚を薄くする必要がある。本実施の形態では、パララックスバリア43、光変調パネル51の両方のガラスをエッチングして薄くすることにより、この仕様を満たしている。
【0055】
[物体検出動作]
物体検出動作は、図3の近接センサパネル60Pを、図5の検出判定部6が制御することで行われる。
【0056】
図3において、m本の駆動電極DE1〜DEmと、n本のセンサ線SL1〜SLnの各々が所定の強さで静電容量結合しており、その状態で、センサ読み出しVドライバ6Vの走査によってm本の駆動電極DE1〜DEmが順次交流駆動される。指先が外面10Sから十分遠い場合は、n本のセンサ線SL1〜SLnの電位変化(交流電圧変化)が均一である。指先が外面10Sにある程度近づくと、その付近の幾つかの電極交差部分で既存の静電容量に人体の外部容量が実効的に外付けされる状態となる。そのため、交流電圧変化の波高値が、その外部容量の大きさに依存して低下する。
【0057】
この交流電圧変化の波高値の低下は、例えば、以下のようにして検出判定される。
図3(A)の検出判定部6、特に図5に示すセンサ駆動検出部6Bには、例えばセンサ線ごとに検出回路が設けられている。検出回路の出力は、制御回路7との協働により定期的にサンプリングされて、サンプリング結果がある閾値Vtで判定され、物体の有無が監視される。ここで、センサ線ごとの検出回路は、望ましくは、センサ駆動回路6Aとともに表示パネル10P内に配置される。例えば、センサ線ごとの検出回路をセンサ読み出しHドライバ6Hとして設けることができる。
【0058】
センサ読み出しVドライバ6Vが画面内の順次走査を繰り返している最中に、あるセンサ線(通常、連続した複数のセンサ線)で、サンプリング結果のレベルが低下し、閾値Vtを下回ることが観測される。すると、検出判定部6は指先等の物体が、外面10Sに近接(または接触)したと判定する。
この近接判定がされる単数または複数のセンサ線アドレスがx方向の物体位置に対応し、近接判定がされる時間(クロックの同期情報から得る1画面走査時間内の時間)がy方向の物体位置情報に相当する。
したがって、検出判定部6は、物体近接検出だけでなく、その位置を検出することができる。
【0059】
本実施の形態では、映像信号PSに含まれる視差情報(例えば視差画素ピッチPに対応)に基づいて設定された外面との距離(高さ)で被検出物が外面10Sに近接したことを検出する。より望ましい要件は、近接センサパネル60Pは、視差情報に基づいて立体画像が結像する3D表示高さHf(図6)と同じ位置、または当該3D表示高さHfより外面10Sに近い側の位置に検出限界の下限をもつ物体検出感度特性を有する。
【0060】
図7に、近接センサパネル60Pの物体検出感度特性の例を示す。図7の横軸は図6の外面10Sの位置を原点とした高さ方向(z方向)の距離を現し、縦軸は任意単位(a.u.)の感度Iを表す。
例えば、検出限界の下限感度が図7の縦スケール換算で1(a.u.)とすると、外面10Sの接触状態から高さが約10[mm]付近までは物体検出が可能である。通常の視差画素ピッチPが、数[mm]〜10[mm]までの3D表示高さHfで立体画像を発生させるように規定されていると、図7の感度特性で上記望ましい要件が満たされる。
【0061】
一方、図7の感度特性では上記望ましい要件が満たされないときは、満たされるように表示パネル10Pの構造パラメータが設定されていることが、本実施の形態における立体画像表示装置の特徴である。
このような構造パラメータとして最も有効なのが、近接センサの配線、ガラス厚といったパラメータである。センサについては、配線幅(駆動電極DEやソース線SL)を大きくし、場合によっては配線を間引いて所望の配線幅を確保することによって感度を向上させるという方法が可能であり、3D表示モードでは配線を束ねて荒めに検出し、2D表示モードでは元に戻して細かく検出するということも可能である。
【0062】
なお、構造パラメータは光学部品がパララックスバリア(PV)以外の場合もあり、光変調パネル51も液晶パネル以外の場合もある。ただし、いずれにしても、通常、ガラス等の光透過材料の支持体が存在し、その支持体の厚さ削減が全体の厚み削減への寄与が大きい。よって、画像発生部(本例では光変調パネル51)と光学部品(本例ではPV)の少なくとも一方の支持体の厚さを、感度向上のために削減する構造パラメータとする。この場合も、上記他の構造パラメータ(例えば、センサ配線幅)を支持体の厚さと組み合わせて厚さ削減対象としてもよい。
【0063】
図8に、立体画像表示用の画像の例を示す。
図8(A)および図8(B)に示すように、2次元画像を左、右の用途に分けて作り、1ラインおきに左、右の2次元画像が交互に重なった空間分割の映像信号PSが光変調パネル51に与えられる。映像信号PSには重畳時の画像の空間的なずれを表す視差情報が含まれる。光変調パネル51および表示制御部は、光変調パネル51から視差情報を検出し、視差情報に適した制御をパララックスバリア43で行うことによって、2つの2次元画像が合成された立体画像(図8(C))を発生させる。
なお、図5の構成例では、制御回路7が視差情報の抽出を行うが、視差情報の抽出を制御回路7以外の専用回路で行っても構わない。
【0064】
立体画像は任意であるが、一例として操作ボタンを立体表示する場合がある。
図9に、ボタン操作の例を示す。図示例では、4つのスタートボタンが同一の3D表示高さHfで立体表示されている。このうち“START C”の立体表示ボタンが操作されると(図9(A))、その時点ですぐにセンサ反応(物体判定)が発生し、直ぐに、図9(B)のように、その操作された立体表示ボタンのみ3D表示高さHf=0の2次元表示ボタンに変更される。そのため、操作者は立体画像でも通常の2次元画像と同様な、操作時点で瞬時に操作の結果がわかるため、操作上の違和感が解消される。
【0065】
このような反応性のよさは、センサの反応位置を、外面10Sから離れたところの立体画像の結像位置(3D表示高さHf)に合わせておくことにより、達成される。そのためには、前述した感度特性に関する望ましい要件が満たされるように当該立体画像表示装置が構成されている。画像の切り替えは、この場合、他の3つのスイッチは3Dのままであるため、パララックスバリアはそのまま維持され、その一つのスイッチについて画像のみ、2Dに切り替わる。
【0066】
本方式では、通常の2次元を表示することも、パララックスバリアパネルを通常の白表示にすることにより可能となる。この場合、タッチパネルは、駆動設定により、通常の接触式タッチパネルとして使うことも可能である。
【0067】
なお、以上の画像切り替えはアプリケーションプログラムに応じて適宜変更されるものであり、ボタン操作の場合に限定されない。操作位置の情報が重要な、例えばお絵かきソフトのような用途でも反応性がよい画像切り替えが可能である。
また、パララックスバリアをそのまま駆動させておいて、入力される映像信号が2D表示のものであれば、2Dを表示することも可能である。この場合の2D表示は解像度が低いが、3Dの画像情報が入力された場合、スムーズに3Dを表示することができるという利益が得られる。
【0068】
ただし、当該立体画像表示装置が特定用途の機器、たとえば銀行その他の手続きを行うもの等である場合には、アプリケーションプログラムとその実行処理手段(画像処理回路)そのものを立体画像表示装置内部にもたせてもよい。このような画像処理回路は大規模なため、一般には表示パネル10P外の基板にICとして実装されるが、その実装基板を含めて立体画像表示装置を構成してもよい。
【0069】
そのような実行処理手段は、本実施の形態では図示しないが、後述の電子機器への適用例で詳示するものと同様に、表示映像へのフィードバックを行うことで画像の切り替えを実行する。なお、電子機器の場合、内部記憶したアプリケーションプログラムが複数存在し、それらが切り替えられること、また外部から新たにプログラムが移植される場合がある点で、特定用途の専用機器とは異なる。
【0070】
<2.第2の実施の形態>
第2の実施の形態は、表示パネルに静電容量式センサを内蔵した例として、表示パネルの駆動電極がセンサ駆動電極と共用される一部内蔵型の構成に関する。第1の実施の形態とは構造上の違いがあるのみで、その他の動作や検出手法等は、第1の実施の形態と共通するため、以下、その違いのみ説明する。
【0071】
図10に、本実施の形態に関わる表示パネルの概略的な断面図を示す。
図10の構成では、近接センサパネル60P(図2)が省略され、符号52により示す光変調パネルが、そのセンサの機能をもつ。以下、この光変調パネルを、センサ内蔵パネル52と呼ぶ。
【0072】
図11(A)〜図11(C)に、さらに詳細な断面図と平面図を示す。
図11(A)に示す断面構成は、IPSモード等の縦方向の駆動モードで動作する表示パネル構成である。
【0073】
図11(A)の表示パネル10Pは、後述する第3の実施の形態の図12と同様な画素がマトリクス配置されている(図解では6画素分のみ示す)。各画素は、液晶層25に電圧駆動する電極は、画素ごとに分離されてマトリクス配置された画素電極22であり、他方側の電極は複数の画素で共通な駆動電極23である。
【0074】
画素電極22は、不図示のTFTを介してy方向に長い画素列ごとに配線された信号線に接続され、この信号線に映像信号PSが与えられる。映像信号PSの供給制御は、図1の表示Hドライバ5Hにより行われる。
TFTのゲートはx方向に長い画素行ごとに配線された走査線で駆動され、複数の走査線は表示Vドライバ5Vによって線順次走査が行われる。
【0075】
駆動電極23には、コモン駆動信号Vcomが与えられる。コモン駆動信号Vcomは、中心電位を基準として正と負の電位を、1水平期間(1H)ごとに反転した信号である。
駆動電極23は、例えば、TFT基板30に形成された平坦化内に埋め込まれて形成され、その平坦化膜上に画素電極22が形成されている。なお、不図示のTFTを形成する半導体薄膜、信号線や走査線などの画素制御配線等も、この平坦化膜内に階層化されて形成されている。さらに、
TFT基板21に、図11に示す検出判定部6の検出回路DETが形成されていてもよい。
【0076】
駆動電極23は、近接検出動作を行う近接センサの一部を構成するタッチ検出センサの駆動電極DE(第1の実施の形態参照)としても兼用されるものである。
【0077】
より詳細に望ましい駆動では、図11(C)に示すように、k本の駆動電極23を1つの駆動電極DEとしてセンサ読み出しVドライバ6Vによる駆動が行われる。このとき、最初の駆動電極DE1は駆動電極23_1〜23_kを選択するように決められる。つぎの駆動電極23の選択駆動(駆動電極DE2の駆動)では、駆動電極DE1選択時の駆動電極配列から、k本より少ない1以上の任意本数の駆動電極23だけシフトして次のk本の駆動電極23が決められる。この動作が繰り返されてセンサ駆動が行われる。
【0078】
このような駆動では、駆動電極DEはその幅が大きくないと感度(センサ線SLの交流電圧変化の低下量)が大きくできない。その一方で、これを単一の導電層から形成すると、駆動時に切り替わりが視認されてしまう。このトレードオフを解消または緩和するために、このような駆動が望ましい。
第1の実施の形態で図7の感度特性を向上させたい場合があるが、センサ内蔵型ではこのトレードオフが感度特性向上の制限要因となる場合がある。そのような場合、図11(C)に示す複数電極の選択とシフトの手法を採用すると、その制限要因が撤廃または緩和され、より感度向上がしやすい利益を享受できる。
【0079】
対向基板31は、その液晶層側にカラーフィルタ24が形成されている。カラーフィルタ24は、例えば赤(R)、緑(G)、青(B)の3色のカラーフィルタ層を周期的に配列して構成したもので、画素PIX(画素電極22)ごとにR,G,Bの3色の1色が対応付けられている。なお、1色が対応付けられている画素をサブ画素といい、R,G,Bの3色のサブ画素を画素という場合があるが、ここではサブ画素も画素PIXと呼称する。
【0080】
対向基板31の他方の面(外面10S側)には、センサ線SLが形成され、さらに、センサ線SLの上には、第2偏光板50が形成されている。センサ線SLの配列自体は図3に示すものと同様である。一方、第1偏光板40は、第1の実施の形態と同様、TFT基板30の裏面に貼られている。
なお、第2偏光板50とセンサ線SLの形成層とは図示例と逆であってもよい。また、対向基板31に、近接検出動作を行う検出判定部6の検出回路DETが形成されていてもよい。
【0081】
第1の実施の形態の近接センサパネル60Pを示す図3(B)の断面では、センサ線SLが外面10S側に配置され、駆動電極DEmが第1センサ基板11と第2センサ基板12との間に配置されている。
この基本配置は、図11(A)でも踏襲されている。つまり、基板の位置関係で言えば、第1センサ基板11にTFT基板30が対応し、第2センサ基板12に対向基板31が対応するため、その両基板間に駆動電極23(駆動電極DEmの構成要素)が配置されている。また、第2センサ基板12の外面10S側にセンサ線SLが配置されている。
図3ではセンサ線SLと駆動電極DEmの配置位置を反対とすることもできるが、図11では、センサ線SLは周囲に電位変動する電極や配線がないことが必要なため、センサ線SLを外面10S側とする必要がある。
【0082】
なお、液晶層25とTFT基板30との間、および液晶層25と対向基板31との間には、それぞれ配向膜が配設される。
【0083】
上記第2の実施の形態、ならびに、前述した第1の実施の形態において、液晶層25は、TN(ツイステッドネマティック)、VA(垂直配向)、IPS(インプレーンスイッチング)、ECB(電界制御複屈折)等の各種表示モードに適合した液晶材料が用いられる。
また、アクティブマトリクス駆動が望ましいが、そのための画素選択に用いるTFTが形成される半導体薄膜は、多結晶シリコン(p−Si)、非晶質シリコン(a−Si)のいずれの膜であってもよい。
【0084】
TNやVAの液晶層は、通常、縦電界の駆動モードであるが、その場合、図11(B)のように、駆動電極23が対向基板31の側、つまりカラーフィルタ24と配向膜(不図示)の間に配置される。
このため駆動電極23は、コンタクト導電柱によってTFT基板21と連結されている。このコンタクト導電柱を介して、TFT基板21から駆動電極23に交流パルス波形のコモン駆動信号Vcomが印加されるようになっている。
図11(B)でも検出回路DETは、対向基板31の側に形成してもよいし、TFT基板30の側に形成してもよい。
【0085】
第2の実施の形態では、センサ内蔵パネル52として、近接センサパネルの機能と表示パネルの機能が一体化しているため、特に大きな厚さをしめる支持体としての(ガラス)基板の枚数が削減されている。よって、第1の実施の形態より高感度化しやすい利点がある。
【0086】
<3.第3の実施の形態>
センサ感度が半導体デバイスの進歩で向上しやすく、より高感度で、また表示パネルに内蔵しやすい方式として光学式がある。
本実施の形態は、光学式センサを表示パネル内に有する立体画像表示装置に関する。以下の説明において、特に近接センサの回路構成と、それ以外で第1および第2の実施の形態で述べた静電容量式と異なる点とを述べる。したがって、すでに述べたパララックスバリア(PV)の構造、立体画像表示動作の基本、および、光と静電容量変化という検出原理を除く物体検出動作の基本(特に検出感度と結像高さとの関係)は、実施の形態間で差がない。
【0087】
本実施の形態では、センサ内蔵パネル52を有する点で第2の実施の形態と共通する。そのため、図10の概略断面構成は、本実施の形態でも適用できる。
【0088】
光学方式では、受光素子を含むセンサ回路をマトリクス配置した光センサアレイをセンサ内蔵パネル52内に有する。その位置は、TFT基板30側、対向基板31側のどちらでもよい。
例えば対向基板31側に光センサアレイを形成する場合を、図11(A)の静電容量式の断面を借りて説明するとするならば、その形成位置は、通常、対向基板31とカラーフィルタ24の間となる。ガラス基板の一方の面にTFT製造技術で光センサアレイを形成し、その裏面にカラーフィルタ24を形成可能であれば、光センサアレイを対向基板31と第2偏光板50の間(この場合、センサ線SLはない)に配置してもよい。
【0089】
一方、光センサアレイをTFT基板30側に形成する場合は、製造のしやすさから、画素電極22よりTFT基板30側の、画素ごとのTFTが形成される層と同一の階層で光センサ回路を形成することが望ましい。ただし、異なる階層でも構わない。
【0090】
光センサ回路に受光素子を含むが、その光源は図10のバックライト20から与えられるようにしてよい。ただし、表示光と同じ光源からの光が被検出物に反射して発生した反射光を受光する場合、そのままだと周囲の乱反射の影響で受ける光がノイズ成分となるため大きな受光感度が得られない。
S/N比を改善するには、受光素子の感度特性を可視光とは異なる非可視光、例えば赤外線に感度ピークまたは感度中心波長を持つように設定することが望ましい。また、赤外領域にピーク等を持たずとも、可視光の分布中心から感度ピーク等をずらして、近赤外領域またはその近くに感度ピーク等を設定するだけでS/N比の改善が見られるため、それでもよい。
【0091】
受光素子の感度ピークや受光中心波長に対応した波長の光源を、バックライト20内に持たせてもよいし、赤外線等の検出光の発光専用にバックライト20と重ねて面発光部を設けてもよい。この面発光部は、可視光に十分な透過性が確保されるならば、光変調パネルと外面10sとの間に配置してもよいが、この場合、図6の3D表示高さHfがとれなくなる可能性があるし、専用の面発光部を設けるとコスト的にも不利である。
そこで望ましくは、赤外LEDを、白色LEDに対し適度な数の頻度と配置でバックライト20内に設けるとよい。
【0092】
なお、バックライト20からは白色LEDの光のみ出力させて、これを表示光にも検出光にも利用し、カラーフィルタ層のセンサ領域に対応した部分に可視光を遮断または減衰させ、赤外領域や近赤外領域の光を有効に透過する波長選択性を持たせる構成でもよい。
また、受光素子の受光面に対しては検出光(反射光)を効率よく導く集光レンズアレイを形成して、被検出物側からの光の全受光量に閉める割合を高めることでS/N比を上げてもよい。
上記したS/N比向上の手段は、任意に複数組み合わせてもよい。
【0093】
[画素回路およびセンサ回路の構成例]
図12は、同一または異なる階層に形成される画素回路(画素PIXの等価回路)と近接センサ回路SCの回路図である。
近接センサ回路SCは、カラーフィルタによるノイズ低減(可視光遮断)を行う場合、例えば、画素配列において表示画素部間に設けられた遮光領域を利用して配置される。よって、表示に用いられる画素が配置された“表示領域DR”に対し、近接センサ回路SCが配置された領域を“センサ領域SR”と呼ぶ。表示領域DRとセンサ領域(遮光領域)SRは、外面10Sから見た平面内において、所定の割合で繰り返し、規則的に配置される。
【0094】
表示領域DRには、水平方向に延在する表示走査線DSCNと垂直方向に延在する映像信号線DSLとの交点付近に、薄膜トランジスタ(TFT)などからなるセレクトトランジスタSTが配置されている。セレクトトランジスタSTがFETからなる場合、そのゲートが表示走査線DSCNに接続され、そのドレインが映像信号線DSLに接続されている。セレクトトランジスタSTのソースは画素ごとの画素電極22に接続されている。画素電極22が隣接する液晶層(光変調層)6を駆動する電極であり、通常、透明電極材料から形成されている。
【0095】
例えば映像信号線DSLと直交する方向(水平方向)に延在するコモン駆動信号Vcomの供給線に、液晶層を挟んで画素電極22と対向する対向電極(駆動電極23)が設けられている。対向電極(駆動電極23)は通常、画素間に共通に設けられ、透明電極材料から形成されている。なお、画素電極22と駆動電極23の配置に限れば、図11(A)や図11(B)に示されているとおりである。
【0096】
このような構成の表示領域DRの各画素PIXにおいて、図1の表示Vドライバ5Vの制御により表示走査線DSCNを介して供給される表示走査信号に基づいてセレクトトランジスタSTがオンまたはオフする。セレクトトランジスタSTがオンすると、このときに、図1の表示Hドライバ5Hの制御により映像信号線DSLに供給されている映像信号PSに応じた画素電圧が画素電極22に画素電圧が印加され、これにより表示状態が設定される。
【0097】
なお、画素PIXに配置される補助容量Cauxと、その制御線である補助容量線CLは、液晶層25の等価容量が比較的小さい微細画素では必須であるが、これらは省略されることもある。補助容量線CLの制御は、表示走査線DSCNと同様、図1の表示Vドライバ5Vで行われる。
【0098】
表示領域DRに隣接するセンサ領域(遮光領域)SRには、例えばフォトダイオードなどからなる光センサ70(受光素子)が配置され、逆バイアスのため、そのカソード側に電源電圧Vddが供給されるようになっている。光センサ70のアノードであるフローティングディフュージョンFDには、リセットトランジスタRST、ゲートトランジスタGTおよびキャパシタCが接続されている。
【0099】
光センサ70のフローティングディフュージョンFDは、キャパシタCの大きさで蓄積容量が決まり、その蓄積電荷がリセットトランジスタRSTによって接地電位に放電(リセット)されるようになっている。リセットトランジスタRSTをオンからオフの状態にしてから、つぎにオンするまでの時間が電荷蓄積時間、つまり受光時間あるいは検出時間に相当する。
ゲートトランジスタGTはフローティングディフュージョンFDのオーバフロー量(蓄積電荷量)を制御するトランジスタであり、所定のゲート電圧Vgでバイアスされている。
【0100】
また、電源電圧Vddの供給線と、垂直方向に延在するセンサ線SLとの間に、アンプトランジスタATおよび読み出しトランジスタRTが直列接続されている。アンプトランジスタATのゲートがフローティングディフュージョンFDに接続されることで、その電位を増幅し、ソースフォロアで読み出しトランジスタRTのドレインに与える。
増幅後の電位は読み出しトランジスタRTがオンとなるタイミングでセンサ線SLに排出され、図1のセンサ読み出しHドライバ6H(検出回路DET)に入力される。
【0101】
また、リセットトランジスタRSTのオンとオフの動作は、図1のセンサ読み出しVドライバ6Vからリセット線RSTLにより供給されるリセット信号により制御される。読み出しトランジスタRTのオンとオフの動作は、センサ読み出しVドライバ6Vからリード制御線RCLにより供給されるリード制御信号により制御される。
【0102】
本方式では、バックライト側から照射された光が対象物に当たって戻ってきて、それをセンサ内蔵パネル52内の光センサで感知することにより、対象物を認識する。このとき、例えば、近接センサ回路SCのセンサ線SLから読み出されたセンサ出力信号は、検出回路DETに読み出され、サンプリングされて、サンプリング結果を所定の閾値Vtと比較することで近接検出判定がなされる。
【0103】
そのため、本方式では、対象物を液晶パネルに接触させる必要がなく、光センサの感度を調節しておくことにより、立体画像の反応させたい位置で、センサを反応させることが可能である。
なお、第1の実施の形態で述べた、望ましい要件を満たす感度特性が得られている場合は感度の調整は不要な場合がある。この要件を満たす感度特性が得られないような場合は、第1の実施の形態で述べたとおりのパラメータ調整で対応する。つまり、表示パネル10Pの構造パラメータ、特にパララックスバリア43とセンサ内蔵パネル52の少なくとも一方の支持体(ガラス基板等)の厚さを予め調整している。これに加え、光学式の場合、S/N比の向上によって検出限界の下限をさらに小さくして、上記望ましい要件を満たす感度特性が得られやすいように光学あるいはデバイスのパラメータを予め調整することでもよい。
【0104】
図13に、光センサ70の感度特性の例を示す。図13の横軸と縦軸は、図7の場合と基本的には同じである。但し、図13の縦軸は光センサ70自体の任意単位の感度Iであるため、構造パラメータの最適化、デバイスや光学パラメータの最適化を行わない場合には、S/N比の悪さから任意感度I=20が検出限界となる。しかし、この場合でも本方式の光センサは、外面10Sから約7[mm]まで検出対象物を検出することができている。
【0105】
前述した構造パラメータ(例えば基板厚)の最適化を行うと、検出限界をとなる感度(図13のI=20のポイント)を、例えば10以下に下げることができ、さらに高い位置での検出が可能である。また、デバイスパラメータや、波長選択フィルタや集光レンズを設けるなどによる光学パラメータの最適化によって、さらに高い位置での検出も可能である。
本方式の感度特性は、図7と比較すると、検出限界から外面位置までの広い範囲で感度の直線性に優れるという特徴がある。
【0106】
第1の実施と同様、パネルから離れたところに立体画像が結像し、それに光センサの反応位置を合わせておくことにより、その位置に指がきたときに反応して、例えば第1の実施の形態の図9と同様に、反応後の画像のように画面を切り替えることが可能になる。
また、本方式では、第1の実施の形態と同様、通常の2次元を表示することも、パララックスバリアパネルを通常の白表示にすることにより、可能となる。この場合、光センサは、駆動設定により液晶パネル表面の接触位置を検出することによって、通常の接触式タッチパネルとして使うことも可能である。
【0107】
図14に、光学式の場合の機能回路図を示す。
図14は、図5に対応するもので、その違いのみ説明すると、図5で設けられていたセンサ駆動検出部6Bがブロックとして省略されている。そのため、センサ読み出しHドライバ6H内の検出回路DETからの信号をサンプリングして、閾値Vtと比較判定する機能は制御回路7にもたせてある。
なお、この機能を受け持つセンサ駆動検出部6Bと同様な回路ブロックを図14に設けてもよい。ただし、主に光センサの駆動はセンサ読み出しHドライバ6Hで行うため、この回路ブロックが行う機能はセンサ検出(サンプリングと、Vt比較検出)のみとなる。
【0108】
ここで、他の実施の形態でも同様であるが、サンプリング後にホールドする機能があると検出タイミングの余裕ができるため望ましい。また、他の実施の形態でも同様であるが、サンプリング(およびホールド)に変えて、アナログ信号をデジタル信号に変換するものでもよい。
【0109】
<4.第4の実施の形態>
本実施の形態は、検出範囲の閾値Vtおよび表示画像の適応制御の例を開示する。この実施の形態は、第1〜第3の実施の形態と重複適用できるが、ここでは第3の実施の形態での例を説明する。
【0110】
図15は、適応制御の基本的な流れを示すフローチャートである。以下、図15の手順を、適宜、制御または処理の主体を図5および図14の機能ブロックで引用しつつ説明する。
ステップST1では、1画面に相当する映像信号PSが時系列で入力される。
【0111】
ステップST2では、制御回路7が3次元(3D)画像の表示モードであるか2次元(2D)画像の表示モードであるかを判断する。この判断が「NO」の場合はステップST2の監視ループがまわるが、「YES」の場合は次のステップST3でPV(パララックスバリア43)を、パララックスバリア駆動回路8Aがオンにする。
ステップST2の監視ループをまわすのは、画面の一部が3D画像の場合があり、その表示期間だけPVをオンとするためである。
【0112】
ステップST3では、PVのオンにより画面の一部または全部で3D画像表示が開始される。
【0113】
ステップST2で3D表示モードが判定されると同時に、ステップST4でボタンがあると、制御回路7が、そのボタンが3D表示であるかどうかを、映像信号PS内の視差情報(視差画素ピッチPの有無)によって判断する。ボタンが3D表示の場合は、つぎのステップST5で、制御回路7が、その位置の視差画素ピッチPに基づいて決まる3D表示高さHf付近に検出範囲の上限を設定する。この検出範囲の上限は、例えば図13に示す閾値Vtで規定され、そのときの高さ(ここでは一例として4[mm])以下で対象物の検出がされる。つまり、この例では0[mm]から4[mm]までが検出範囲である。
【0114】
検出範囲の上限を閾値Vtで決めるのは、対象物が遠くから近づくときの最初の検出ポイントが重要であり、そのポイントで閾値Vtを設定して、そこで閾値Vtとセンサ出力値(サンプリング値)との比較を行えば近接検出が可能だからである。
検出範囲の下限は極端な場合、持たなくてもよいが、検出感度特性に面内ばらつきがあること等を考慮して、ある一定幅の検出範囲とすることが望ましい。あるいは、検出範囲の下限は外面10Sで固定していてもよい。上記例で“0[mm]から4[mm]までの検出範囲”とは、この下限固定の場合である。
【0115】
つぎのステップST6では、視差情報(視差画素ピッチP)の変更、または、複数の視差画素ピッチPがあるかを制御回路7が判断する。
視差画素ピッチPの変更や複数の視差画素ピッチPがある場合、未だ閾値Vt設定していないボタンについて、3D表示高さHfごとに閾値Vtを設定する。
【0116】
視差画素ピッチPの変更や複数の視差画素ピッチPがない場合、つぎのステップST7で設定した閾値Vtを用いた近接判定が行われる。閾値Vtに達しないセンサ出力の場合は、“センサ反応なし”として、ステップST6のP監視とステップST7の検出とのループがまわる。したがって、指が外面10Sより遠くにある場合は、3D画像表示がされていても、このループが回った状態となる。
【0117】
閾値Vtに達したセンサ出力が制御回路7で認識されると、ステップST7で検出ありとなり、“センサ反応あり(状態S)”の検知信号が制御回路7から、画像処理回路等に出される。そのため、ステップST8で、ボタンに対応した次処理のフローが開始する。
【0118】
図15のフロー自体は、状態Sの検知信号の出力と同時にステップST1に戻り、次の画像の入力を待つか、表示画像に変更がかけられるのを待つ状態となる。
次の画像が入力され、あるいは、表示画像に変更がかかると、ステップST2からの、上記した一連の処理が再開される。
【0119】
一方、ステップST4にて、ボタンが3D表示でないと制御回路7が判断すると、ステップST5Aにて閾値Vtを外面付近(立体表示装置の最表面)付近に設定する。これによりPVがそのときだけオフされ、通常のタッチパネルと同じ2D画像でのボタン表示となる。
【0120】
つぎのステップST7Aでは、ステップST7と同様な閾値Vtを用いた検出が行われ、検出されない場合は、ステップST7Aが閾値Vtを超えるセンサ出力の待ち状態に入る。
検出後は、状態Sの検知信号の出力を契機にステップST8Aの次処理にフローが移行し、図15のフロー自体はステップST1に戻される。
【0121】
以上の検出判定の制御によれば、殆どの判断や処理が制御回路7で行われるため、ステップST2で3D表示モードに入ってから、ステップST8で次処理への移行するまでCPU等が所定のプログラムシーケンスを実行するわずかな時間である。そのため、処理時間は極めて短い。
その上、検出範囲の高さ方向の上限が3D表示高さHf付近に設定されている。
以上の理由から、ユーザがボタンに接触したと同時か僅かな遅れで、次処理が開始され、画面変更としてユーザが認識されるまでの応答性が高い立体画像表示装置が実現される。
また、視差画素ピッチPの変更があっても、それに追従して検出判定部6内の制御回路7が検出範囲(閾値Vt)を変更するため、シームレスな処理が可能である。
【0122】
なお、図15の制御でステップST6での待ち状態が長い場合等にあっては、検出判定部(制御回路7)が、閾値Vtを、所定の範囲内で最小値から被検出物が検知されるまで漸増させる動作を繰り返すことにより、より早いタイミングでの検出を可能としてもよい。
【0123】
図16に、1つの3D表示ボタンで視差情報が変化する場合を示す。
図16(A)および図16(B)に示す左右の元画像を合成されてできる立体画像は、その視差情報(視差画素ピッチP)の大きさに応じて、3D表示高さHfも変化する。
例えば、アプリケーションが切り替わる場合など、ある画面では、視差画素ピッチPが小さいが、その後の画面では視差画素ピッチPが変化することがある。その場合、一般には3D表示高さHfも変化するが、検出範囲が固定であると、あるアプリケーションでは応答性がよいが、他のアプリケーションでは応答性が悪い事態が発生する。
【0124】
図15のフローではステップST6で視差画素ピッチPの変更が監視されるため、このような応答性のばらつきが解消される。
【0125】
図17に、複数のボタンで異なる3D表示高さHfが設定されている場合の操作前後の模式図を示す。また、図18にボタンごとの閾値の設定範囲の例と、感度曲線上の閾値の設定例とを示す。
3D表示高さHf このような例としては、シュミュレータやゲーム等のソフトで、4つの位置に異なった画像を表示させ、それをクリックすることにより、画像が切り替わっていくようなゲーム等が考えられる。クリックされた画像は2D表示ボタンになるか、3D表示のまま画像が変わるか、3D表示でその高さがさらに変わる等してユーザはボタン操作が正しく行われたことを知ることができる。
【0126】
このようなアプリケーションでは、操作から応答までの時間が長いと、短時間で4つのボタンの結像状態を切り替えるアプリケーション自体が意味をなさない。
本発明の適用で個々の応答時間が短縮されるため、このような表示時間差を利用したアプリケーションの実現が可能となる。
【0127】
なお、図19の模式図と、図20の感度曲線上の閾値設定例のように、同じ3D表示高さHfのボタンでも、一方(ボタンA)は3D画像に変更し、他方(ボタンC)のみ2D画像を維持する制御も可能である。
【0128】
<4.変形例1>
図21のように、例えば外付けの近接センサパネル60Pを有する場合に、液晶パネル(光変調パネル51)の前面にレンチキュラーレンズ80が取り付けられ、それにより、立体画像表示を可能にしてもよい。レンチキュラーレンズのさらに前方に静電容量式の近接センサパネル60Pが配置されている。
【0129】
図22に、このレンチキュラーレンズと液晶表示パネルの光学構成図を示す。
図22に示すように、レンチキュラーレンズ80により、左右の画像が左右の眼(R)と眼(L)に別々に入り、画像を立体として認識することが可能になる。
【0130】
<5.変形例2>
上述した第1〜第4の実施の形態および変形例1では、画像表示パネルの前に立体画像用光学部品、センサが配置されるため、画像表示パネルは、この実施例では液晶表示パネルであるが、有機ELやプラズマ表示素子であってもよい。
【0131】
<6.電子機器への本発明の適用例>
以上説明した第1〜第4の実施の形態に係る立体画像表示装置は、様々な電子機器、例えば、デジタルカメラ、ノート型パーソナルコンピュータ、携帯電話等の携帯端末装置、ビデオカメラなど、あらゆる分野の電子機器の表示装置に適用することが可能である。以下に、本実施の形態が適用される電子機器の一例について説明する。
【0132】
図23は、電子機器の構成を表すブロック図である。
図23に図解する電子機器1000は、I/Oディスプレイパネル(表示パネル10P)と、バックライト20と、表示ドライブ回路1100(表示駆動回路5Aに相当)と、受光ドライブ回路1200(検出判定部6)と、を有する。以上の構成は、従前の実施の形態でも必須の構成である。
電子機器1000は、画像処理部1300と、アプリケーションプログラム実行部1400とを、さらに有する。
【0133】
I/Oディスプレイパネル(表示パネル10P)は、複数の画素が全面に渡ってマトリクス状に配置された液晶パネル(LCD(Liquid Crystal Display))からなり、線順次動作をしながら表示データに基づく所定の図形や文字などの画像を表示する機能(表示機能)を有する。また、I/Oディスプレイパネルは、その外面10Sに接触または近接する物体を撮像する機能(撮像機能)を有する。
【0134】
表示ドライブ回路1100は、I/Oディスプレイパネル(表示パネル10P)において表示データに基づく画像が表示されるように、I/Oディスプレイパネルの駆動を行う(線順次動作の駆動を行う)回路である。
【0135】
受光ドライブ回路1200は、I/Oディスプレイパネル(表示パネル10P)において受光データが得られるように、指先などの被検出物を検出し、判定する回路である。
上記表示ドライブ回路1100が線順次で画素駆動を行って液晶層(光変調層)を駆動するのに対し、受光ドライブ回路1200はセンサアレイを線順次で駆動する回路である。なお、センサからのセンサ出力を、例えばフレーム単位でフレームメモリ(FM)に蓄積し、物体の大きさ等を判別してもよい。
【0136】
画像処理部1300は、受光ドライブ回路1200から出力される検出結果や検出画像に基づいて所定の画像処理(演算処理)を行う。これにより、画像処理部1300は、I/Oディスプレイパネルに接触または近接する物体に関する情報(位置座標データ、物体の形状や大きさに関するデータなど)を検出し、取得する。なお、この検出判定の処理については、第1および第4の実施の形態ですでに説明したため、ここで説明は省略する。
【0137】
アプリケーションプログラム実行部1400は、画像処理部1300による検知結果に基づいて所定のアプリケーションソフトウエアウエアに応じた処理を実行する回路である。
【0138】
アプリケーションソフトウエアに応じた処理には、2D画像と3D画像の切り替え、表示ボタンを高さ検出結果に応じて大きくし、あるいは小さくする処理、ボタンそのものを変更する処理などが例示できる。
また、本発明の適用により複数の高さでの操作検出ができる。このため、高さ範囲を数段階に区分して、どの区分で指先などの被検出物が操作を行ったかに応じて、アプリケーションソフトウエアに、単なるボタン切り替えなどの2値情報以上の情報量をもつ多値情報を入力することもできる。よって、動作の程度、例えばゲームなどのアクションの程度などを指先の高さで制御するアプリケーションソフトウエアの操作への適用も可能である。
なお、簡単な例では、指先などの被検出物の位置座標(高さを含む)を表示データに含むようにし、I/Oディスプレイパネル10P上に表示させる処理も例示できる。
【0139】
ボタン表示や位置データなどを含み、アプリケーションプログラム実行部1400で発生する表示データは、表示ドライブ回路1100へ供給される。
【0140】
図24は、本発明が適用されるテレビを示す斜視図である。
本適用例に係るテレビは、フロントパネル120やフィルターガラス130等から構成される映像表示画面部110を含む。映像表示画面部110として第2〜第4の本実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0141】
図25は、本発明が適用されるデジタルカメラを示す斜視図であり、(A)は表側から見た斜視図、(B)は裏側から見た斜視図である。
本適用例に係るデジタルカメラは、フラッシュ用の発光部111、表示部112、メニュースイッチ113、シャッターボタン114等を含む。表示部112として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0142】
図26は、本発明が適用されるノート型パーソナルコンピュータを示す斜視図である。
本適用例に係るノート型パーソナルコンピュータは、本体121に、文字等を入力するとき操作されるキーボード122、画像を表示する表示部123等を含む。表示部123として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0143】
図27は、本発明が適用されるビデオカメラを示す斜視図である。
本適用例に係るビデオカメラは、本体部131、前方を向いた側面に被写体撮影用のレンズ132、撮影時のスタート・ストップスイッチ133、表示部134等を含む。表示部134として第2〜第4の実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0144】
図28は、本発明が適用される携帯端末装置、例えば携帯電話機を示す図であり、(A)は開いた状態での正面図、(B)はその側面図、(C)は閉じた状態での正面図、(D)は左側面図、(E)は右側面図、(F)は上面図、(G)は下面図である。
本適用例に係る携帯電話機は、上側筐体141、下側筐体142、連結部(ここではヒンジ部)143、ディスプレイ144、サブディスプレイ145、ピクチャーライト146、カメラ147等を含む。ディスプレイ144やサブディスプレイ145として第2〜第4の本実施の形態および変形例に示す立体画像表示装置を用いることができる。
【0145】
以上説明したように、本発明のセンサ機能付の立体画像表示装置は、立体画像が結像する位置でセンサが反応することにより、立体画像という実際に実物がない情報入力手段であっても、違和感を緩和して反応させることができる。また、大きさについても従来のタッチパネル付液晶表示装置とあまり大きな差はないため、携帯機器に使用することも可能である。また、2次元と3次元画像の切り替えも可能であり、通常の2次元画像時に通常のタッチパネルとして使うことも可能である。
【0146】
以上の説明では、立体表示装置を主として説明するが、この説明は本発明に関わる物体近接検出装置の実施の形態も兼ねる。
ここで物体近接検出装置は、立体表示装置では必須の立体画像発生部の構成が任意である点で異なる。つまり、物体近接検出装置は、実際に立体画像を表示する必要はなく、視差情報が入力されていれば足りる。そして、物体近接検出装置は、立体表示発生装置と同様に、入力される視差情報に基づいて設定された外面との距離(高さ)で被検出物が外面に近接したことを検出する近接(プロキシミティ)センサ部を有する。
【符号の説明】
【0147】
5H…表示Hドライバ、5V…表示Vドライバ、6…検出判定部、6H…センサ読み出しHドライバ、6V…センサ読み出しVドライバ、7…制御回路、8…PV制御部、10P…表示パネル、10S…外面、20…バックライト、22…画素電極、23…駆動電極、24…カラーフィルタ、25…液晶層、30…TFT基板、31…対向基板、40…第1偏光板、41…第3偏光板、42…光制御層、43…パララックスバリア、44…第1PV基板、45…第2PV基板、46…スイッチ液晶層、50…第2偏光板、51…光変調パネル、52…センサ内蔵パネル、70…光センサ、80…レンチキュラーレンズ、PS…映像信号、DE…駆動電極
【特許請求の範囲】
【請求項1】
被検出物が接近する外面と、
入力される映像信号から3次元の立体画像を発生する立体画像発生部と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、前記映像信号に含まれる視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
を有する立体画像表示装置。
【請求項2】
前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する
請求項1に記載の立体画像表示装置。
【請求項3】
前記立体画像が結像する前記高さを変更可能に、前記立体画像発生部を制御する表示制御部と、
前記近接センサ部から出力されるセンサ出力信号から前記被検出物の検出を判定し、前記表示制御部の制御により変更される、前記立体画像発生部が前記立体画像を結像する前記高さに追従して、前記判定に用いる、前記高さの方向の検出範囲を変更可能な検出判定部と、
を有する請求項2に記載の立体画像表示装置。
【請求項4】
前記検出判定部は、前記近接センサ部からのセンサ出力信号を閾値と比較することで前記被検出物の存在を検知し、当該検知に用いる前記閾値を、所定の範囲内で最小値から前記被検出物が検知されるまで漸増させることで前記検出範囲の変更を実行する
請求項3に記載の立体画像表示装置。
【請求項5】
前記検出範囲は、前記閾値を上限とし、当該閾値から所定の値だけ小さい下限値をもつ一定幅の検出範囲である
請求項4に記載の立体画像表示装置。
【請求項6】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記表示制御部は、前記光学部品を制御して、前記立体画像を前記外面から出力させる3次元画像の表示モードと、前記2次元の表示画像を前記外面から出力させる2次元画像の表示モードとを全画面または画面の一部で切り替える機能をもつ
請求項3に記載の立体画像表示装置。
【請求項7】
前記表示制御部は、前記被検出物の検出ありと前記検出判定部で判定されたときは、検出ありと判定された画面の一部または全画面を、他の立体画像表示画面または2次元の表示画面に切り替える機能をもつ
請求項3に記載の立体画像表示装置。
【請求項8】
前記立体画像が結像する前記高さを変更可能に、前記立体画像発生部を制御する表示制御部と、
前記近接センサ部から出力されるセンサ出力信号から前記被検出物の検出を判定する検出判定部と、
を有し、
前記表示制御部は、前記視差情報に基づいて、互いに異なる前記高さで結像する複数の画像部分を前記立体画像の内に含むように前記立体画像発生部を制御し、
前記検出判定部は、前記検出を判定する際に、前記高さの方向における検出範囲を、結像位置の高さが異なる前記複数の画像部分の各高さに対応した異なる複数の高さ範囲に設定する
請求項2に記載の立体画像表示装置。
【請求項9】
前記検出判定部は、前記複数の画像部分の各高さが前記表示制御部の制御により変更されたときは、当該高さの変更に追従して、前記判定に用いる、前記高さの方向の検出範囲を変更する
請求項8に記載の立体画像表示装置。
【請求項10】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記光学部品は、前記表示制御部の制御により、前記視差情報の大きさに対応するピッチで、光を遮光する視差バリアと、視差バリア間の光が透過する領域であるスリットとを交互に平行ストライプ状に形成するパララックスバリアである
請求項1に記載の立体画像表示装置。
【請求項11】
前記パララックスバリアは、前記表示制御部の制御により、前記視差バリアおよび前記スリットの長手方向を前記他方向と前記一方向の双方で切り替えることが可能である
請求項10に記載の立体画像表示装置。
【請求項12】
前記外面の、前記被検出物が接近する側と反対の側に、
前記近接センサ部と、
前記画像発生部として設けられ、前記映像信号に応じて透過光を変調する光変調パネルと、
前記光変調パネルが前記表示画像を発生するときに当該光変調パネルへ光を照射するバックライトと、
が、前記外面から近い側から順に配置されている
請求項1に記載の立体画像表示装置。
【請求項13】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記光学部品が、前記光変調パネルと前記バックライトとの間に配置される
請求項12に記載の立体画像表示装置。
【請求項14】
前記近接センサ部は、
一方向に分離されて前記外面と対向する面状に配置されて交流駆動される複数の駆動電極と、
前記一方向と異なる方向に分離されて前記複数の駆動電極と対向する面状に配置され、前記複数の駆動電極の各々と静電容量結合し、前記被検出物の近接に応答して電位が変化する複数の検出電極と、
を有する請求項1に記載の立体画像表示装置。
【請求項15】
前記複数の駆動電極は、前記画像発生部の内部で、前記映像信号に応じて透過光を変調する液晶層に対し、画素ごとの画素電極との電位差で電圧を印加する共通電極を兼用する
請求項14に記載の立体画像表示装置。
【請求項16】
前記外面の、前記被検出物が接近する側と反対の側に前記立体画像発生部が配置され、
前記近接センサ部は、前記立体画像発生部の内部に設けられ、当該立体画像発生部から出力される画像光が前記被検出物で反射することで生じる反射光を受光する光センサを、前記外面と対向する面状に2次元配置した光センサアレイを有する
請求項1に記載の立体画像表示装置。
【請求項17】
被検出物が接近する外面と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、入力される視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
を有する物体近接検出装置。
【請求項18】
入力される映像信号から3次元の立体画像表示画像を発生する立体画像表示画像発生部を有し、
前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する
請求項17に記載の物体近接検出装置。
【請求項19】
被検出物が接近する外面と、
入力される映像信号から3次元の立体画像を発生する立体画像発生部と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、入力される視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
前記近接センサ部の検出結果に基づいて画像処理を実行し、前記画像発生部に入力する前記映像信号、前記光学部品に入力する前記視差情報の少なくとも一方を変更する画像処理部と、
を有する電子機器。
【請求項1】
被検出物が接近する外面と、
入力される映像信号から3次元の立体画像を発生する立体画像発生部と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、前記映像信号に含まれる視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
を有する立体画像表示装置。
【請求項2】
前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する
請求項1に記載の立体画像表示装置。
【請求項3】
前記立体画像が結像する前記高さを変更可能に、前記立体画像発生部を制御する表示制御部と、
前記近接センサ部から出力されるセンサ出力信号から前記被検出物の検出を判定し、前記表示制御部の制御により変更される、前記立体画像発生部が前記立体画像を結像する前記高さに追従して、前記判定に用いる、前記高さの方向の検出範囲を変更可能な検出判定部と、
を有する請求項2に記載の立体画像表示装置。
【請求項4】
前記検出判定部は、前記近接センサ部からのセンサ出力信号を閾値と比較することで前記被検出物の存在を検知し、当該検知に用いる前記閾値を、所定の範囲内で最小値から前記被検出物が検知されるまで漸増させることで前記検出範囲の変更を実行する
請求項3に記載の立体画像表示装置。
【請求項5】
前記検出範囲は、前記閾値を上限とし、当該閾値から所定の値だけ小さい下限値をもつ一定幅の検出範囲である
請求項4に記載の立体画像表示装置。
【請求項6】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記表示制御部は、前記光学部品を制御して、前記立体画像を前記外面から出力させる3次元画像の表示モードと、前記2次元の表示画像を前記外面から出力させる2次元画像の表示モードとを全画面または画面の一部で切り替える機能をもつ
請求項3に記載の立体画像表示装置。
【請求項7】
前記表示制御部は、前記被検出物の検出ありと前記検出判定部で判定されたときは、検出ありと判定された画面の一部または全画面を、他の立体画像表示画面または2次元の表示画面に切り替える機能をもつ
請求項3に記載の立体画像表示装置。
【請求項8】
前記立体画像が結像する前記高さを変更可能に、前記立体画像発生部を制御する表示制御部と、
前記近接センサ部から出力されるセンサ出力信号から前記被検出物の検出を判定する検出判定部と、
を有し、
前記表示制御部は、前記視差情報に基づいて、互いに異なる前記高さで結像する複数の画像部分を前記立体画像の内に含むように前記立体画像発生部を制御し、
前記検出判定部は、前記検出を判定する際に、前記高さの方向における検出範囲を、結像位置の高さが異なる前記複数の画像部分の各高さに対応した異なる複数の高さ範囲に設定する
請求項2に記載の立体画像表示装置。
【請求項9】
前記検出判定部は、前記複数の画像部分の各高さが前記表示制御部の制御により変更されたときは、当該高さの変更に追従して、前記判定に用いる、前記高さの方向の検出範囲を変更する
請求項8に記載の立体画像表示装置。
【請求項10】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記光学部品は、前記表示制御部の制御により、前記視差情報の大きさに対応するピッチで、光を遮光する視差バリアと、視差バリア間の光が透過する領域であるスリットとを交互に平行ストライプ状に形成するパララックスバリアである
請求項1に記載の立体画像表示装置。
【請求項11】
前記パララックスバリアは、前記表示制御部の制御により、前記視差バリアおよび前記スリットの長手方向を前記他方向と前記一方向の双方で切り替えることが可能である
請求項10に記載の立体画像表示装置。
【請求項12】
前記外面の、前記被検出物が接近する側と反対の側に、
前記近接センサ部と、
前記画像発生部として設けられ、前記映像信号に応じて透過光を変調する光変調パネルと、
前記光変調パネルが前記表示画像を発生するときに当該光変調パネルへ光を照射するバックライトと、
が、前記外面から近い側から順に配置されている
請求項1に記載の立体画像表示装置。
【請求項13】
前記立体画像発生部は、
2次元の表示画像を発生する画像発生部と、
前記映像信号の視差情報に基づいて、前記画像発生部で発生した前記2次元の表示画像を、前記外面から被検出物の側に離れた位置で3次元の立体画像表示画像として結像させるために透過光を制御する光学部品と、
を含み、
前記光学部品が、前記光変調パネルと前記バックライトとの間に配置される
請求項12に記載の立体画像表示装置。
【請求項14】
前記近接センサ部は、
一方向に分離されて前記外面と対向する面状に配置されて交流駆動される複数の駆動電極と、
前記一方向と異なる方向に分離されて前記複数の駆動電極と対向する面状に配置され、前記複数の駆動電極の各々と静電容量結合し、前記被検出物の近接に応答して電位が変化する複数の検出電極と、
を有する請求項1に記載の立体画像表示装置。
【請求項15】
前記複数の駆動電極は、前記画像発生部の内部で、前記映像信号に応じて透過光を変調する液晶層に対し、画素ごとの画素電極との電位差で電圧を印加する共通電極を兼用する
請求項14に記載の立体画像表示装置。
【請求項16】
前記外面の、前記被検出物が接近する側と反対の側に前記立体画像発生部が配置され、
前記近接センサ部は、前記立体画像発生部の内部に設けられ、当該立体画像発生部から出力される画像光が前記被検出物で反射することで生じる反射光を受光する光センサを、前記外面と対向する面状に2次元配置した光センサアレイを有する
請求項1に記載の立体画像表示装置。
【請求項17】
被検出物が接近する外面と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、入力される視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
を有する物体近接検出装置。
【請求項18】
入力される映像信号から3次元の立体画像表示画像を発生する立体画像表示画像発生部を有し、
前記近接センサ部は、前記視差情報に基づいて前記立体画像が結像する前記高さと同じ位置、または当該高さより前記外面に近い側の位置に検出限界の下限をもつ物体検出感度特性を有する
請求項17に記載の物体近接検出装置。
【請求項19】
被検出物が接近する外面と、
入力される映像信号から3次元の立体画像を発生する立体画像発生部と、
前記外面の、前記被検出物が接近する側と反対の側に設けられ、入力される視差情報に基づいて設定された前記外面との距離である高さで前記被検出物が前記外面に近接したことを検出する近接(プロキシミティ)センサ部と、
前記近接センサ部の検出結果に基づいて画像処理を実行し、前記画像発生部に入力する前記映像信号、前記光学部品に入力する前記視差情報の少なくとも一方を変更する画像処理部と、
を有する電子機器。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】
【図7】

【図8】

【図9】

【図10】

【図11】

【図12】

【図13】

【図14】

【図15】

【図16】

【図17】

【図18】

【図19】

【図20】

【図21】

【図22】

【図23】

【図24】

【図25】

【図26】

【図27】

【図28】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2011−13778(P2011−13778A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−155376(P2009−155376)
【出願日】平成21年6月30日(2009.6.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年6月30日(2009.6.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]