
船舶推進装置
【課題】構造を簡素化できるハイブリッド式の船舶推進装置を提供すること。
【解決手段】船舶推進装置1は、プロペラ軸線A2まわりに回転可能なプロペラ5と、プロペラ軸線A2まわりにプロペラ5を取り囲むダクト26とを含む。プロペラ5は、複数の羽根30と、プロペラ軸線A2まわりに複数の羽根30を取り囲む筒状のリム31とを含む。船舶推進装置1は、ダクト26に対してプロペラ5を回転させる内燃機関と、リム31を回転させることにより、ダクト26に対してプロペラ5を回転させる電動モータ7とを含む。
【解決手段】船舶推進装置1は、プロペラ軸線A2まわりに回転可能なプロペラ5と、プロペラ軸線A2まわりにプロペラ5を取り囲むダクト26とを含む。プロペラ5は、複数の羽根30と、プロペラ軸線A2まわりに複数の羽根30を取り囲む筒状のリム31とを含む。船舶推進装置1は、ダクト26に対してプロペラ5を回転させる内燃機関と、リム31を回転させることにより、ダクト26に対してプロペラ5を回転させる電動モータ7とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、船舶推進装置に関する。
【背景技術】
【0002】
エンジン(内燃機関)と電動モータとを備えるハイブリッド式の船舶推進装置が提案されている。
たとえば特許文献1には、エンジンと電動モータとが内蔵された船外機を備える船舶推進装置が開示されている。エンジンは、ドライブシャフト、前後進切替機構、およびプロペラシャフトを介して、プロペラに連結されている。電動モータは、エンジンと前後進切替機構との間でドライブシャフトに介装されている。エンジンは、ドライブシャフトに介装された多板クラッチを介して電動モータに連結されている。エンジンによってプロペラが駆動されるときには、多板クラッチが接続され、電動モータによってプロペラが駆動されるときには、多板クラッチが切断される。これにより、電動モータの動力がエンジンに伝達されることが防止される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−137646号公報
【発明の概要】
【課題を解決するための手段】
【0004】
しかしながら、特許文献1に記載の船舶推進装置では、電動モータが、前後進切替機構とエンジンとの間でドライブシャフトに介装されているので、エンジンと電動モータとの間に多板クラッチを設ける必要がある。そのため、船舶推進装置の構造が複雑化してしまう。
そこで、この発明の目的は、構造を簡素化できるハイブリッド式の船舶推進装置を提供することである。
【0005】
前記目的を達成するための本発明の一実施形態は、複数の羽根と、プロペラ軸線まわりに前記複数の羽根を取り囲む筒状のリムとを含み、前記プロペラ軸線まわりに回転可能なプロペラと、前記プロペラ軸線まわりに前記プロペラを取り囲むダクトと、前記ダクトに対して前記プロペラを回転させる内燃機関と、前記リムを回転させることにより、前記ダクトに対して前記プロペラを回転させる電動モータとを含む、船舶推進装置を提供する。
【0006】
この構成によれば、羽根およびリムを含むプロペラが、ダクトによって取り囲まれている。内燃機関は、ダクトに対してプロペラをプロペラ軸線まわりに回転させる。一方、電動モータは、リムを回転させることにより、ダクトに対してプロペラをプロペラ軸線まわりに回転させる。プロペラは、内燃機関および電動モータのいずれか一方、または内燃機関および電動モータの両方によってプロペラ軸線まわりに回転駆動される。これにより、船舶を推進させる推力が発生する。このように、内燃機関および電動モータが、互いに独立してプロペラを回転させることができるので、船舶推進装置の構造を簡素化できる。
【0007】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記複数の羽根と共に前記プロペラ軸線まわりに回転するプロペラ回転軸をさらに含んでいてもよい。この場合、前記内燃機関は、前記プロペラ回転軸を回転させることにより、前記ダクトに対して前記プロペラを回転させてもよい。
また、前記電動モータは、前記リムを直接駆動するダイレクトドライブモータ(direct drive motor)であってもよい。すなわち、前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含んでいてもよい。この場合、前記リムは、前記ロータの少なくとも一部を構成するマグネットを含んでいてもよい。すなわち、前記電動モータは、永久磁石型ロータ(permanent-magnet rotor)を含む永久磁石型直流モータであってもよい。また、前記電動モータは、突極型ロータ(salient poled rotor)を含むリラクタンスモータ(reluctance motor)であってもよい。
【0008】
また、前記船舶推進装置は、前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、前記内燃機関の回転速度を検出するエンジン速度検出装置と、前記プロペラの回転速度を検出するプロペラ速度検出装置と、前記前後進切替機構を制御する制御装置とをさらに含んでいてもよい。プロペラ速度検出装置は、プロペラ自体の回転速度を検出してもよいし、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)の回転速度を検出してもよい。すなわち、プロペラ速度検出装置は、前後進切替機構より下流側のいずれかの位置で回転速度を検出するように構成されていてもよい。
【0009】
この場合、前記制御装置は、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行ってもよい。すなわち、前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させてもよい。そして、前記制御装置は、前記速度差を前記所定の範囲内まで変化させた後、前記シフトイン動作を行ってもよい。前記シフトイン操作が行われたときに前記速度差が前記所定の範囲内であれば、前記制御装置は、前記内燃機関および電動モータの出力を変化させることなく、前記シフトイン動作を行ってもよい。この場合、前後進切替機構の入力軸(たとえば、後述する前側ギヤおよび後側ギヤ)と前後進切替機構の出力軸(たとえば、後述するドッグクラッチ)との相対速度が小さい状態で、入力軸と出力軸とが結合される。そのため、シフトイン動作に伴って発生する衝撃(シフトショック)を低減できる。
【0010】
また、前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。そして、前記制御装置は、前記前後進切替機構を中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上に達するまで前記プロペラを加速させてもよい。そして、前記制御装置は、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えてもよい。反転前方向および反転後方向は、いずれもプロペラ軸線まわりの互いに反対の方向である。
【0011】
内燃機関は、前後進切替機構を介してプロペラに接続されている。前後進切替機構が中立状態に切り替わると、内燃機関とプロペラとの接続が解除されるので、プロペラから内燃機関に加わる負荷がなくなる。そのため、プロペラの回転速度が高い状態で前後進切替機構が中立状態に切り替わると、内燃機関の回転速度が大幅に上昇する場合がある。したがって、反転前方向へのプロペラの回転速度が低下した状態で、前後進切替機構を中立状態に切り替えることにより、内燃機関の回転速度が大幅に上昇することを防止できる。さらに、プロペラの回転速度が接続速度以上の状態で前後進切替機構を中立状態から前進状態または後進状態に切り替えることにより、シフトショックを低減できる。
【0012】
また、前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。シフトアウト前方向は、シフトアウト操作が行われる前のプロペラの回転方向である。たとえば前後進切替機構を前進状態から中立状態に切り替えるシフトアウト操作がシフト操作子に行われた場合、シフトアウト前方向は、プロペラが前進方向の推力を発生する方向である。
【0013】
前記内燃機関は、船内に配置されていてもよいし、船外に配置されてもよい。前記内燃機関が船外に配置されている場合、前記船舶推進装置は、前記内燃機関が内蔵された船外機を含んでいてもよい。具体的には、前記船舶推進装置は、ドライブシャフトと、前後進切替機構と、エンジン出力伝達軸とをさらに含んでいてもよい。前記ドライブシャフトは、略鉛直方向に延びており、前記内燃機関によって回転駆動される。前記前後進切替機構は、前後方向に延びる出力軸を含み、前記ドライブシャフトの回転を前記出力軸に伝達する。前記エンジン出力伝達軸は、前記出力軸の回転を前記プロペラに伝達する。前記前後進切替機構は、前記ドライブシャフトの回転方向に対する前記出力軸の回転方向を変更可能である。したがって、前記前後進切替機構は、前記エンジン出力伝達軸およびプロペラの回転方向を変更可能である。
【0014】
また、前記船舶推進装置が、前記ドライブシャフトと、前記前後進切替機構と、前記エンジン出力伝達軸とを含む場合、前記プロペラは、前記前後進切替機構の前方または後方に配置されていてもよいし、前記出力軸より下方に配置されていてもよい。前記プロペラが前記前後進切替機構の前方または後方に配置されている場合、前記出力軸と前記エンジン出力伝達軸とは、同軸であってもよい。また、前記プロペラが前記出力軸より下方に配置されている場合、前記船舶推進装置は、前記内燃機関の動力を前記リムに伝達する歯車伝達機構をさらに含んでいてもよい。この場合、前記歯車伝達機構は、前記エンジン出力伝達軸と共に回転する駆動ギヤと、前記駆動ギヤの回転が伝達され、前記リムと共に回転する従動ギヤとを含んでいてもよい。
【0015】
また、前記船舶推進装置は、前記プロペラのピッチ(プロペラが一回転して進む距離)を変更できるように構成されていてもよい。
具体的には、前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含んでいてもよい。この場合、前記前側リムおよび後側リムのいずれか一方が、前記内燃機関によって回転駆動され、他方が、前記電動モータによって回転駆動されてもよい。この場合、前記内燃機関および電動モータが前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチが変更される。したがって、内燃機関および電動モータは、高トルク型と高出力型との間でプロペラの特性を変化させることができる。
【0016】
また、前記リムが前記前側リムおよび後側リムを含んでおり、前記電動モータが、前記前側リムを回転させる前側電動モータと、前記後側リムを回転させる後側電動モータとを含んでいてもよい。この場合、前記船舶推進装置は、前記前側電動モータおよび後側電動モータを制御することにより、前記前側リムおよび後側リムの相対回転量を制御する制御装置をさらに含んでいてもよい。この構成によれば、前記前側電動モータおよび後側電動モータが前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチが変更される。したがって、前記制御装置は、前記前側電動モータおよび後側電動モータを制御することにより、プロペラの特性を高トルク型と高出力型との間で無段階で調整できる。
【0017】
また、前記船舶推進装置が、前記プロペラのピッチを変更できるように構成されている場合、前記船舶推進装置は、前記前側リムおよび後側リムの相対回転量を規制する回転量規制部をさらに含んでいてもよい。この構成によれば、前側リムおよび後側リムの相対回転量が規制されるので、プロペラのピッチの変化量も規制される。したがって、船舶推進装置は、回転量規制部によって許容される前側リムおよび後側リムの相対回転量の範囲内で、プロペラのピッチを変更できる。
【0018】
前記回転量規制部は、前記リムおよび羽根のいずれか一方に設けられた支持部と、前記リムおよび羽根の他方に設けられており、前記支持部が挿入された長孔を区画する被支持部とを含んでいてもよい。
この構成によれば、リムおよび羽根が、支持部および被支持部によって連結されている。支持部は、被支持部によって区画された長孔に挿入されている。支持部および被支持部は、被支持部が支持部に支持された状態で長孔の長手方向に相対移動できる。リムおよび羽根は、支持部および被支持部の相対移動に伴って相対移動する。そして、支持部および被支持部(長孔の内面)が接すると、支持部および被支持部の相対移動が規制される。そのため、リムおよび羽根の相対移動が規制される。すなわち、羽根に対する前側リムの移動が規制される共に、羽根に対する後側リムの移動が規制される。言い換えると、前側リムおよび後側リムは、共通の部材(羽根)に対する相対移動が規制されることにより、相対回転が規制される。これにより、前側リムおよび後側リムの相対回転量が規制される。
【0019】
また、前記船舶推進装置が前記回転量規制部を含む場合、前記プロペラは、前記プロペラ軸線に沿って延びており、前記前側リムと共に前記プロペラ軸線まわりに回転する前側回転軸と、前記プロペラ軸線に沿って延びており、前記後側リムと共に前記プロペラ軸線まわりに回転する後側回転軸とをさらに含んでいてもよい。この場合、前記回転量規制部は、前記前側回転軸および後側回転軸にそれぞれ設けられており、所定の角度範囲内で前記プロペラ軸線まわりに相対回転可能に噛み合う前側噛み合い部および後側噛み合い部を含んでいてもよい。
【0020】
この構成によれば、前側噛み合い部が、プロペラの前側回転軸に設けられており、後側噛み合い部が、プロペラの後側回転軸に設けられている。したがって、前側噛み合い部は、前側回転軸と共にプロペラ軸線まわりに回転し、後側噛み合い部は、後側回転軸と共にプロペラ軸線まわりに回転する。前側噛み合い部および後側噛み合い部は、所定の角度範囲内でプロペラ軸線まわりに相対回転可能に噛み合っている。したがって、前側噛み合い部および後側噛み合い部が接すると、前側リムおよび後側リムの相対回転が規制される。これにより、前側リムおよび後側リムの相対回転量が規制される。
【0021】
また、前記船舶推進装置は、光を発する発光体をさらに含んでいてもよい。輝度や点灯時間などの前記発光体の発光状態は、前記プロペラの回転状態に応じて変化してもよい。また、前記発光体は、前記ダクトおよびプロペラのいずれか一方に配置されていてもよいし、前記ダクトおよびプロペラの両方に配置されていてもよい。前記発光体は、電灯であってもよいし、LED(発光体ダイオード)であってもよい。この場合、前記発光体に供給される電力は、前記電動モータに電力を供給するモータ電力源からの電力であってもよいし、前記発光体に電力を供給する専用の電力供給装置からの電力であってもよい。
【0022】
前記船舶推進装置が前記電力供給装置を含む場合、前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含んでいてもよい。さらに、前記船舶推進装置は、少なくとも一部が前記ステータに対向する位置で前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルをさらに含んでいてもよい。すなわち、前記電力供給装置は、前記発電用コイルを含んでいてもよい。この場合、前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されていてもよい。
【0023】
この構成によれば、発電用コイルがリムに取り付けられており、発光体が、発電用コイルに接続されている。発電用コイルの少なくとも一部は、ステータに対向している。したがって、電動モータがプロペラ(リム)を回転させると、発電用コイルを通過する磁束が変化し、発電用コイルで電流(誘導電流)が発生する。これにより、発光体が光を発する。発電用コイルで発生する電流は、プロペラの回転速度に応じて変化する。さらに、プロペラの回転速度が同じであっても、高トルクでプロペラを回転させる場合には、ステータに供給される電力が低トルクの場合よりも大きいので、発電用コイルで発生する電流が増加する。したがって、発光体の発光状態は、回転速度およびトルクを含むプロペラの回転状態に応じて変化する。このように、プロペラと共に回転する部材(発電用コイル)が電力を発生するので、発光体がプロペラに配置されている場合でも、発光体に対して確実に電力を供給できる。つまり、固定部分(ダクト)から回転体(プロペラ)に延びる複雑な配線を設けなくてもよい。
【0024】
また、前記船舶推進装置が前記電力供給装置を含む場合、前記船舶推進装置は、前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルと、前記ダクトに取り付けられており、前記発電用コイルに対向する発電用マグネットとをさらに含んでいてもよい。すなわち、前記電力供給装置は、専用のコイルおよびマグネットを含んでいてもよい。この場合、前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されていてもよい。
【0025】
この構成によれば、発電用コイルがリムに取り付けられており、発電用マグネットがダクトに取り付けられている。さらに、発電用コイルおよび発電用マグネットが互いに対向している。したがって、内燃機関および電動モータの少なくとも一方がプロペラ(リム)を回転させると、発電用コイルで電流が発生し、プロペラの回転状態に応じた発光状態で発光体が発光する。
【0026】
また、本発明の他の実施形態は、内燃機関と、電動モータと、前記内燃機関および電動モータの少なくとも一方によってプロペラ軸線まわりに回転駆動されるプロペラと、前記内燃機関から前記プロペラへの動力の伝達経路上に配置されており、前記プロペラが前進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、前記プロペラが後進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構とを含み、前記電動モータは、前記内燃機関から前記プロペラへの動力の伝達経路上において前記前後進切替機構より前記プロペラ側に配置されている、船舶推進装置を提供する。
【0027】
この構成によれば、電動モータが、前後進切替機構よりプロペラ側に配置されている。すなわち、電動モータは、内燃機関の動力の伝達方向に関して、前後進切替機構よりも下流に配置されている。電動モータは、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)に連結されていてもよいし、プロペラに連結されていてもよい。電動モータの動力は、前後進切替機構より下流の部分(中間部材またはプロペラ)から入力される。したがって、電動モータは、前後進切替機構が前進状態、中立状態、および後進状態のいずれの状態であっても、プロペラを回転させることができる。
【0028】
前記船舶推進装置は、前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、前記内燃機関の回転速度を検出するエンジン速度検出装置と、前記プロペラの回転速度を検出するプロペラ速度検出装置と、前記前後進切替機構を制御する制御装置とをさらに含んでいてもよい。
この場合、前記制御装置は、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行ってもよい。すなわち、前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させてもよい。そして、前記制御装置は、前記速度差を前記所定の範囲内まで変化させた後、前記シフトイン動作を行ってもよい。前記シフトイン操作が行われたときに前記速度差が前記所定の範囲内であれば、前記制御装置は、前記内燃機関および電動モータの出力を変化させることなく、前記シフトイン動作を行ってもよい。
【0029】
また、前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。そして、前記制御装置は、前記前後進切替機構を中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上に達するまで前記プロペラを加速させてもよい。そして、前記制御装置は、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えてもよい。
【0030】
また、前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。
【図面の簡単な説明】
【0031】
【図1A】この発明の一実施形態に係る船舶推進装置の側面図である。
【図1B】この発明の一実施形態に係る船舶推進装置の側面図である。
【図2】この発明の一実施形態に係る船舶推進装置の背面図である。
【図3】この発明の一実施形態に係る前後進切替機構の模式図である。
【図4】この発明の一実施形態に係る船舶推進装置の下部の部分断面図である。
【図5】この発明の一実施形態に係る船舶推進装置の下部の断面図である。
【図6】この発明の一実施形態に係る推進ユニットの背面図である。
【図7A】この発明の一実施形態に係る推進ユニットの外周部の断面図である。
【図7B】この発明の一実施形態に係る推進ユニットの外周部の断面図である。
【図8A】この発明の一実施形態に係る電動モータの一部の断面図である。
【図8B】この発明の一実施形態に係る電動モータの一部の断面図である。
【図9A】この発明の一実施形態に係る推進ユニットの断面図である。
【図9B】この発明の一実施形態に係る推進ユニットの断面図である。
【図10A】図6に示すX−X線に沿う羽根の断面図である。
【図10B】図6に示すX−X線に沿う羽根の断面図である。
【図11】この発明の一実施形態に係る船舶推進装置の電気的構成を示すブロック図である。
【図12】コントロールレバーの操作量と船舶推進装置の出力との関係を示すグラフである。
【図13A】船舶推進装置が自動選択モードに設定されている状態でコントロールレバーが前進位置または後進位置に配置されているときのフローチャートである。
【図13B】レバー位置変化割合およびバッテリーの残量と各モードの範囲との関係について説明するための図である。
【図13C】電動モードについて説明するためのフローチャートである。
【図13D】エンジンモードについて説明するためのフローチャートである。
【図14A】シフトイン操作が行われたときのフローチャートである。
【図14B】シフトアウト操作が行われたときのフローチャートである。
【図15A】反転操作が行われたときのフローチャートである。
【図15B】F→R反転動作およびR→F反転動作について説明するためのフローチャートである。
【図16A】この発明の第2実施形態に係る船舶推進装置の下部の部分断面図である。
【図16B】この発明の第2実施形態に係る推進ユニットの断面図である。
【図17A】この発明の第3実施形態に係る船舶推進装置の下部の部分断面図である。
【図17B】この発明の第3実施形態に係る推進ユニットの背面図である。
【図17C】この発明の第3実施形態に係る推進ユニットの断面図である。
【図18】この発明の第4実施形態に係る推進ユニットの断面図である。
【図19A】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図19B】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図20】この発明の第5実施形態に係る推進ユニットの断面図である。
【図21A】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図21B】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図22A】この発明の第6実施形態に係る推進ユニットの外周部の断面図である。
【図22B】この発明の第6実施形態に係る推進ユニットの外周部の断面図である。
【図23】図22Bに示す推進ユニットの一部を拡大した斜視図である。
【図24】この発明の第7実施形態に係る推進ユニットの背面図である。
【図25A】この発明の第7実施形態に係る推進ユニットの一部の断面図である。
【図25B】この発明の第7実施形態に係る推進ユニットの一部の断面図である。
【図26】この発明の第8実施形態に係る推進ユニットの背面図である。
【図27A】この発明の第8実施形態に係る推進ユニットの一部の断面図である。
【図27B】この発明の第8実施形態に係る推進ユニットの一部の断面図である。
【発明を実施するための形態】
【0032】
以下では、この発明の実施形態を、添付図面を参照して詳細に説明する。
以下の実施形態に係るプロペラは、正転方向および逆転方向に回転可能である。正転方向は、プロペラを後方から見て右まわりであってもよいし、プロペラを後方から見て左まわりであってもよい。以下では、プロペラを後方から見て右まわりの方向をプロペラの正転方向と定義し、プロペラを後方から見て左まわりの方向をプロペラの逆転方向と定義する。
【0033】
[第1実施形態]
図1Aおよび図1Bは、この発明の一実施形態に係る船舶推進装置1の側面図である。図2は、この発明の一実施形態に係る船舶推進装置1の背面図である。図3は、この発明の一実施形態に係る前後進切替機構19の模式図である。
図1Aおよび図1Bに示すように、船舶推進装置1は、船舶V1の船尾に取り付け可能なブラケット2と、ブラケット2を介して船尾に取り付けられる船外機3と、船外機3に取り付けられた推進ユニット4とを含む。図2に示すように、船舶推進装置1は、推進ユニット4に保持されたプロペラ5をさらに含む。船舶推進装置1は、ハイブリッド式の船舶推進装置である。すなわち、図1Aおよび図1Bに示すように、船舶推進装置1は、前後方向に延びるプロペラ軸線A2まわりにプロペラ5を回転させるエンジン6および電動モータ7と、エンジン6を制御するエンジンECU8(Electronic Control Unit)と、電動モータ7を制御するモータECU9とをさらに含む。
【0034】
図1Aおよび図1Bに示すように、エンジン6は、船外機3に内蔵されており、電動モータ7は、推進ユニット4に内蔵されている。エンジン6は、上下方向に延びるクランク軸線まわりに回転可能なクランクシャフトを含む内燃機関である。エンジン6は、燃料供給ホース10を介して、船内に配置された燃料タンク11に接続されている。電動モータ7は、電気配線W1を介して、モータECU9に接続されている。エンジンECU8およびモータECU9は、船内に配置されたバッテリー12に接続されている。バッテリー12の電力は、モータECU9を介して電動モータ7に供給される。モータECU9は、LAN(local area network)ケーブルC1によってエンジンECU8に接続されている。エンジンECU8およびモータECU9は、LANケーブルC1を通じて互いに通信する。
【0035】
図1Aおよび図1Bに示すように、エンジンECU8は、船外機3に内蔵されており、モータECU9は、船内に配置されている。モータECU9は、船外機3または推進ユニット4内に配置されていてもよい。モータECU9が推進ユニット4内に配置される場合、モータECU9は、エンジン6を冷却する冷却水によって冷却されてもよい。この場合、冷却水路は、冷却水がエンジン6よりも先にモータECU9を冷却するように構成されていることが好ましい。この構成によれば、モータECU9は、エンジン6によって温められる前の低温の冷却水によって冷却される。そのため、モータECU9の温度を十分に低下させることができる。
【0036】
図1Aおよび図1Bに示すように、船外機3は、船体H1の後方に配置されている。船外機3は、前述のエンジン6およびエンジンECU8と、エンジン6およびエンジンECU8を覆うエンジンカバー13と、エンジンカバー13から下方に延びるアッパーケース14と、アッパーケース14から下方に延びるロワーケース15とを含む。さらに、船外機3は、上下方向に延びる略鉛直なステアリングシャフト16を含む。船外機3は、略鉛直なステアリング軸線A2(ステアリングシャフト16の中心軸線)まわりに回転可能にブラケット2に連結されている。したがって、船外機3は、船体H1に対してステアリング軸線A2まわりに左右に回動可能である。推進ユニット4は、ロワーケース15の後方に配置されている。推進ユニット4は、ステー17を介してロワーケース15に連結されている。推進ユニット4は、船外機3と共にステアリング軸線A2まわりに回転する。したがって、船外機3がステアリング軸線A2まわりに左右に回動すると、プロペラ5も、ステアリング軸線A2まわりに左右に回動する。
【0037】
図1Aおよび図1Bに示すように、船外機3は、さらに、エンジン6に連結されたドライブシャフト18と、ドライブシャフト18に連結された前後進切替機構19と、前後進切替機構19に連結されたエンジン出力伝達軸20とを含む。ドライブシャフト18は、略鉛直方向に延びている。ドライブシャフト18は、エンジン6によってドライブシャフト18の中心軸線まわりに回転駆動される。ドライブシャフト18は、前後進切替機構19によってエンジン出力伝達軸20に連結されている。エンジン出力伝達軸20は、前後方向に延びている。プロペラ5は、エンジン出力伝達軸20の後端部に連結されている。プロペラ5は、エンジン出力伝達軸20と共に回転する。エンジン6の回転は、ドライブシャフト18、前後進切替機構19、およびエンジン出力伝達軸20を介して、プロペラ5に伝達される。前後進切替機構19は、エンジン出力伝達軸20が正転方向に回転する前進状態と、エンジン出力伝達軸20が逆転方向に回転する後進状態と、ドライブシャフト18とエンジン出力伝達軸20との接続が解除される中立状態との間で切り替わる。したがって、プロペラ5の回転状態は、前後進切替機構19の状態に伴って切り替わる。
【0038】
図3に示すように、前後進切替機構19は、ドライブシャフト18に連結されたピニオン21と、ピニオン21に噛み合う前側ギヤ22および後側ギヤ23と、前側ギヤ22および後側ギヤ23のいずれか一方に選択的に噛み合わされるドッグクラッチ24とを含む。前後進切替機構19は、電動式の前後進切替機構である。すなわち、前後進切替機構19は、ドッグクラッチ24を移動させるシフトアクチュエータ25をさらに含む。シフトアクチュエータ25とドッグクラッチ24とは、図示しないシフトロッドを介して接続されている。エンジンECU8は、前後進切替機構19の出力軸に相当するドッグクラッチ24をシフトアクチュエータ25によって移動させることにより、前後進切替機構19を前進状態、後進状態、および中立状態のいずれかの状態に選択的に切り替える。
【0039】
図3に示すように、ピニオン21、前側ギヤ22、および後側ギヤ23は、いずれもベベルギヤである。前側ギヤ22および後側ギヤ23は、前後方向に間隔を空けて配置されている。ドッグクラッチ24は、前側ギヤ22および後側ギヤ23の間に配置されている。エンジン出力伝達軸20は、前側ギヤ22、後側ギヤ23、およびドッグクラッチ24を前後方向に貫通している。前側ギヤ22および後側ギヤ23は、エンジン出力伝達軸20に対してエンジン出力伝達軸20の中心軸線まわりに回転可能である。前側ギヤ22および後側ギヤ23は、ロワーケース15によって回転可能に保持されている。一方、ドッグクラッチ24は、スプラインによってエンジン出力伝達軸20に連結されている。したがって、エンジン出力伝達軸20およびドッグクラッチ24は、軸方向に相対移動可能であり、エンジン出力伝達軸20の中心軸線まわりに一体回転可能である。ドッグクラッチ24およびエンジン出力伝達軸20は、同軸的に配置されている。
【0040】
ドッグクラッチ24は、ドッグクラッチ24が前側ギヤ22に噛み合う前進位置と、ドッグクラッチ24が後側ギヤ23に噛み合う後進位置との間で、エンジン出力伝達軸20に対して移動可能である。前進位置と後進位置との間の位置(図3に示す位置)は、ドッグクラッチ24が前側ギヤ22および後側ギヤ23の両方から離れている中立位置である。エンジンECU8は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を前進位置、後進位置、および中立位置のいずれかのシフト位置に移動させる。前進位置、後進位置、および中立位置は、それぞれ、前進状態、後進状態、および中立状態に対応している。すなわち、シフトアクチュエータ25がドッグクラッチ24を前進位置に移動させると、前後進切替機構19は、前進状態に切り替わる。
【0041】
ドライブシャフト18は、エンジン6によって一定の回転方向に駆動される。ピニオン21は、ドライブシャフト18と共にドライブシャフト18の中心軸線まわりに回転する。前側ギヤ22および後側ギヤ23は、ピニオン21の回転に伴って互いに反対の方向に回転する。ドッグクラッチ24が前進位置に配置されており、前側ギヤ22が回転している状態では、前側ギヤ22の回転が、ドッグクラッチ24を介してエンジン出力伝達軸20に伝達される。これにより、エンジン出力伝達軸20が正転方向に回転する。また、ドッグクラッチ24が後進位置に配置されており、後側ギヤ23が回転している状態では、後側ギヤ23の回転が、ドッグクラッチ24を介してエンジン出力伝達軸20に伝達される。これにより、エンジン出力伝達軸20が逆転方向に回転する。また、ドッグクラッチ24が中立位置に配置されている状態では、ドライブシャフト18の回転がエンジン出力伝達軸20に伝達されず、ドライブシャフト18が空転する。
【0042】
一方、図1Aおよび図1Bに示すように、推進ユニット4は、前述のプロペラ5および電動モータ7と、プロペラ軸線A2まわりにプロペラ5を取り囲むダクト26とを含む。ダクト26は、前後方向に延びる円筒状である。ダクト26は、ステー17を介してロワーケース15に連結されている。プロペラ5および電動モータ7は、ダクト26によって保持されている。プロペラ5は、ダクト26内で正転方向および逆転方向に回転可能である。エンジンECU8およびモータECU9は、エンジン6および電動モータ7の少なくとも一方によって、正転方向および逆転方向にプロペラ5を回転させる。プロペラ5が正転方向に回転すると、前方からダクト26内に水が吸い込まれ、吸い込まれた水がダクト26から後方に排出される。これにより、前進方向の推力が発生する。これとは反対に、プロペラ5が逆転方向に回転すると、後方からダクト26内に水が吸い込まれ、吸い込まれた水がダクト26から前方に排出される。これにより、後進方向の推力が発生する。
【0043】
船舶推進装置1は、さらに、船舶V1を操舵する操舵装置27を含む。図1Aに示すように、操舵装置27は、操船者によって操作されるティラーハンドル27aを備えていてもよい。また、図1Bに示すように、操舵装置27は、操船者によって操作される操舵部材27bと、操舵部材27bの操作に応じて船外機3をステアリング軸線A2まわりに左右に回動させる操舵ユニット27cとを備えていてもよい。ティラーハンドル27aは、ステアリングシャフト16に連結されている。ステアリングシャフト16は、ティラーハンドル27aと共にステアリング軸線A2まわりに回動する。一方、図1Bに示すように、操舵ユニット27cは、ステアリングシャフト16と共にステアリング軸線A2まわりに回転するステアリングアーム27dに連結されている。操舵ユニット27cは、ステアリング軸線A2まわりにステアリングアーム27dを左右に回動させる。操舵部材27bは、プッシュ・プルケーブルによって操舵ユニット27cに機械的に連結されていてもよいし、操舵ユニット27cに電気的に連結されていてもよい。
【0044】
船舶推進装置1は、さらに、船舶推進装置1の出力調整、および推力の方向の切替を行う出力調整装置28を含む。図1Aに示すように、出力調整装置28は、ティラーハンドル27aに設けられたスロットルグリップ28aおよびシフトレバー28bを備えていてもよい。スロットルグリップ28aは、ティラーハンドル27aの中心軸線まわりに回転可能に構成されており、シフトレバー28bは、下端部を中心に前後に傾倒可能に構成されている。スロットルグリップ28aおよびシフトレバー28bは、操船者によって操作される。エンジンECU8およびモータECU9は、スロットルグリップ28aの位置に応じて船舶推進装置1の出力を調整する。また、エンジンECU8およびモータECU9は、シフトレバー28bの位置に応じて前後進切替機構19の状態を切り替える。たとえばシフトレバー28bが前後に傾けられると、エンジンECU8およびモータECU9は、前後進切替機構19を前進状態または後進状態に切り替える。
【0045】
また、図1Aおよび1Bに示すように、出力調整装置28は、スロットルグリップ28aおよびシフトレバー28bとして機能するリモコンユニット28cを備えていてもよい。リモコンユニット28cは、エンジンECU8およびモータECU9のいずれか一方に電気的に接続されていてもよいし、エンジンECU8およびモータECU9の両方に電気的に接続されていてもよい。リモコンユニット28cからの指令は、有線通信または無線通信によって操舵ユニット27cに送られる。
【0046】
図1Aおよび1Bに示すように、リモコンユニット28cは、前後に傾倒可能なコントロールレバー28dを備えていてもよいし、前後左右に傾倒可能なジョイスティック28eを備えていてもよい。また、リモコンユニット28cは、4つのボタンが設けられたワイヤレスリモコン28fを備えていてもよいし、インターネットなどのデータ通信網を介してエンジンECU8およびモータECU9の少なくとも一方と通信するタッチパネル28gを備えていてもよい。当然、出力調整装置28は、これらの装置以外の装置を備えていてもよい。すなわち、出力調整装置28の構成は、前述の構成に限定されない。
【0047】
以下では、出力調整装置28がリモコンユニット28cを備えており、リモコンユニット28cがコントロールレバー28dを備えている場合について説明する。図1Aに示すように、コントロールレバー28dは、最も前側に傾いた前進出力最大位置Fmaxと、最も後側に後進出力最大位置Rmaxとの間で前後に移動可能である。前進出力最大位置Fmaxは、前進方向の出力が最大の位置であり、後進出力最大位置Rmaxは、後進方向の出力が最大の位置である。前進出力最小位置Fminおよび後進出力最小位置Rminは、前進出力最大位置Fmaxと後進出力最大位置Rmaxとの間に設けられている。前進出力最小位置Fminは、前進方向の出力が最小の位置(零の位置)であり、後進出力最小位置Rminは、後進方向の出力が最小の位置(零の位置)である。
【0048】
図1Aに示すように、前進出力最小位置Fminは、後進出力最小位置Rminよりも前進出力最大位置Fmax側の位置である。前進出力最大位置Fmaxと前進出力最小位置Fminとの間の領域は、前後進切替機構19が前進状態に維持される前進位置(前進領域)であり、後進出力最大位置Rmaxと後進出力最小位置Rminとの間の領域は、前後進切替機構19が後進状態に維持される後進位置(後進領域)である。また、前進出力最小位置Fminおよび後進出力最小位置Rminの間の領域は、前後進切替機構19が中立状態に維持される中立位置である。
【0049】
コントロールレバー28dの現在位置は、リモコンユニット28cからエンジンECU8およびモータECU9に出力される。たとえば操船者がコントロールレバー28dを中立位置から前進位置に移動させると、エンジンECU8は、前後進切替機構19を中立状態から前進状態に切り替える。そして、エンジンECU8およびモータECU9は、前進出力最小位置Fminからのコントロールレバー28dの操作量に比例する大きさの出力を船舶推進装置1に発生させて、船舶V1を前進させる。
【0050】
図4は、船舶推進装置1の下部の部分断面図である。図5は、船舶推進装置1の下部の断面図である。図6は、推進ユニット4の背面図である。図7Aおよび図7Bは、推進ユニット4の外周部の断面図である。
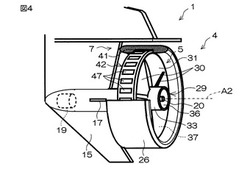
図4に示すように、ダクト26は、前後方向に延びる姿勢でロワーケース15に連結されている。プロペラ5およびダクト26は、同軸的に配置されている。プロペラ5は、プロペラ軸線A2に沿って延びる筒状の回転軸29と、回転軸29の周囲に配置された複数の羽根30(blade)と、複数の羽根30を取り囲む円筒状のリム31とを含む。
【0051】
図5に示すように、回転軸29は、プロペラ軸線A2に沿って延びる円筒状の内軸部32と、プロペラ軸線A2まわりに内軸部32を取り囲む外軸部33と、内軸部32と外軸部33とを連結する複数の連結部34と含む。エンジン出力伝達軸20の後端部は、ロワーケース15から後方に突出している。エンジン出力伝達軸20の後端部は、内軸部32を貫通している。内軸部32は、ボルト35によってエンジン出力伝達軸20の後端部に連結されている。したがって、回転軸29は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。また、連結部34は、内軸部32と外軸部33との間に配置されている。複数の連結部34は、間隔を空けてプロペラ5の周方向に配列されている。内軸部32と外軸部33との間に形成された排気通路36は、ロワーケース15の内部に連通している。エンジン6で生成された排気は、前方から排気通路36に流入する。そして、排気通路36に流入した排気は、排気通路36から後方に排出される。これにより、エンジン6で生成された排気が水中に排出される。
【0052】
図6に示すように、複数の羽根30は、間隔を空けてプロペラ5の周方向に配列されている。羽根30は、リム31の内周面からプロペラ軸線A2に向かって延びる略三角形状である。羽根30は、平らなプレートであってもよいし、曲線部を含む湾曲したプレートであってもよい。羽根30の外端部(リム31側の端部)は、リム31に固定されており、羽根30の内端部(リム31とは反対側の端部)は、回転軸29に固定されている。したがって、回転軸29、羽根30、およびリム31は、プロペラ軸線A2まわりに一体回転可能である。そのため、エンジン出力伝達軸20がプロペラ軸線A2まわりに回転すると、回転軸29、羽根30、およびリム31は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。
【0053】
図5に示すように、リム31は、ダクト26の内側でプロペラ軸線A2を取り囲んでいる。リム31は、ダクト26の内周部に設けられた環状溝37に収容されている。環状溝37は、ダクト26の内周面より凹んでおり、全周に亘って連続している。リム31およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。リム31は、環状溝37内に収容された状態でダクト26に対してプロペラ軸線A2まわりに回転可能である。したがって、プロペラ5は、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0054】
リム31は、ダクト26に保持されていなくてもよいし、複数のベアリングを介してダクト26に保持されていてもよい。たとえば図7Aに示すように、リム31は、2つのスラストベアリングB1とラジアルベアリングB2とを介してダクト26に支持されていてもよい。また、図7Bに示すように、リム31は、複数のテーパローラベアリングB3を介してダクト26に支持されていてもよい。スラストベアリングB1およびラジアルベアリングB2は、ボールベアリングであってもよいし、ローラベアリングであってもよいし、その他の形式のベアリングであってもよい。
【0055】
図7Aに示すように、一方のスラストベアリングB1は、リム31の前端面とダクト26との間に配置されており、他方のスラストベアリングB1は、リム31の後端面とダクト26との間に配置されている。ラジアルベアリングB2は、リム31の外周面とダクト26との間に配置されている。2つのスラストベアリングB1は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、軸方向(プロペラ軸線A2に沿う方向)へのリム31の移動量を規制する。ラジアルベアリングB2は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、径方向へのリム31の移動量を規制する。したがって、軸方向および径方向へのプロペラ5の移動量は、スラストベアリングB1およびラジアルベアリングB2によって規制される。
【0056】
また、図7Bに示すように、複数のテーパローラベアリングB3は、複数の対を構成している。図6および図7Bを併せて参照すると分かるように、対のテーパローラベアリングB3は、前後方向から見たときに重なるように前後に間隔を空けて配置されている。前側のテーパローラベアリングB3は、リム31の前端面とダクト26との間に配置されており、後側のテーパローラベアリングB3は、リム31の後端面とダクト26との間に配置されている。複数の対のテーパローラベアリングB3は、間隔を空けて周方向に配列されている。
【0057】
図7Bに示すように、テーパローラベアリングB3は、ダクト26によって保持された支持軸38と、支持軸38を取り囲む内輪39と、内輪39の周囲に配置された複数のローラ40とを含む。複数のローラ40は、図示しない環状の保持器(retainer)によって保持されている。各ローラ40は、自身の中心軸線まわりに回転しながら(自転しながら)、内輪39まわりに回転可能である。各ローラ40は、リム31の前端面または後端面に接している。テーパローラベアリングB3は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、軸方向および径方向へのリム31の移動量を規制する。したがって、軸方向および径方向へのプロペラ5の移動量は、テーパローラベアリングB3によって規制される。
【0058】
図8Aおよび図8Bは、電動モータ7の一部の断面図である。以下では、図5、図8A、および図8Bを参照する。
図5に示すように、推進ユニット4は、プロペラ5の回転速度を検出するプロペラ速度検出装置43を含む。プロペラ速度検出装置43は、ダクト26の内部に配置されている。電動モータ7の回転角(ロータ42の回転角)は、プロペラ速度検出装置43によって検出される。電動モータ7は、ダクト26の一部によって構成された環状のステータ41と、リム31の一部によって構成された円筒状のロータ42とを含む。すなわち、ダクト26は、ダクト26の外周面と環状溝37の底面との間に配置されたステータ41を含み、リム31は、リム31の外周部に設けられたロータ42を含む。ステータ41およびロータ42は、プロペラ軸線A2を取り囲んでいる。ステータ41およびロータ42は、間隔を空けてプロペラ5の径方向に対向している。図8Aおよび図8Bに示すように、ステータ41は、電磁鋼板などの軟磁性材料によって形成された環状のステータコア44と、ステータコア44に巻回された複数のコイル45とを含む。
【0059】
図8Aに示すように、ロータ42は、軟磁性材料によって形成された円筒状のロータコア46と、ロータコア46に保持された複数のマグネット47とを含む永久磁石型ロータ(permanent-magnet rotor)であってもよい。すなわち、電動モータ7は、永久磁石型直流モータであってもよい。また、図8Bに示すように、ロータ42は、間隔を空けてプロペラ5の周方向に配列された複数の突極48(salient pole)を含んでおり、軟磁性材料によって形成された円筒状の突極型ロータ(salient poled rotor)であってもよい。すなわち、電動モータ7は、スイッチドリラクタンスモータ(switched reluctance motor)であってもよい。電動モータ7は、これらのモータに限らず、ブラシ付きの直流モータであってもよいし、ブラシレスモータであってもよいし、その他の形式のモータであってもよい。
【0060】
図8Aに示すように、複数のコイル45は、プロペラ5の周方向に配列されている。複数のコイル45は、プロペラ軸線A2を取り囲む環状列を構成している。同様に、複数のマグネット47は、プロペラ5の周方向に配列されており、プロペラ軸線A2を取り囲む環状列を構成している。複数のコイル45は、プロペラ軸線A2を取り囲むと共に、プロペラ5の軸方向に並んだ複数の環状列を構成していてもよい。同様に、複数のマグネット47は、プロペラ軸線A2を取り囲むと共に、プロペラ5の軸方向に並んだ複数の環状列を構成していてもよい。たとえば、巻き数が半分に減らされた複数のコイル45によって、プロペラ5の軸方向に並んだ2つの環状列が構成されていてもよい。この構成によれば、電動モータ7の最大出力の変化を抑制しながら、径方向への電動モータ7の厚みを減少させることができる。
【0061】
電動モータ7は、ステータ41によってロータ42をプロペラ軸線A2まわりに回転させることにより、ダクト26に対してリム31をプロペラ軸線A2まわりに回転させる。これにより、複数の羽根30が、ダクト26に対してプロペラ軸線A2まわりに回転する。電動モータ7は、正転および逆転可能である。電動モータ7が正転方向にロータ42を回転させると、プロペラ5も正転方向に回転し、前進方向の推力が発生する。これとは反対に、電動モータ7がロータ42を逆転方向に回転させると、プロペラ5も逆転方向に回転し、後進方向の推力が発生する。モータECU9は、出力調整装置28(図1A参照)から入力された出力指令に基づいてステータ41への電力供給を制御する。すなわち、モータECU9は、プロペラ速度検出装置43からの出力に基づいてステータ41への電力供給を制御することにより、ロータ42の回転方向および回転速度を制御する。
【0062】
図9Aおよび図9Bは、推進ユニット4の断面図である。図10Aおよび図10Bは、図6に示すX−X線に沿う羽根30の断面図である。
図9Aに示すように、ダクト26の前端部の内径は、ダクト26の後端部の内径等しくてもよい。この場合、図10Aに示すように、羽根30の断面は、直線状であってもよい。この構成によれば、プロペラ5の回転速度が同じであれば、推進ユニット4は、前進方向への推力とほぼ同じ大きさの後進方向への推力を発生できる。
【0063】
一方、図9Bに示すように、ダクト26の前端部の内径IDfは、ダクト26の後端部の内径IDrとより大きくてもよい。この場合、図10Bに示すように、羽根30の断面は、前方に凸の円弧状であってもよい。この構成によれば、ダクト26の後端部の流路面積が、ダクト26の前端部の流路面積より小さいので、ダクト26を前から後に通過する水流がダクト26によって加速される。これにより、より大きな前進方向への推力が発生する。さらに、羽根30の断面が、円弧状であるので、推進効率が高まる。
【0064】
図11は、船舶推進装置1の電気的構成を示すブロック図である。
船舶推進装置1は、エンジンECU8およびモータECU9を含む制御装置X1を含む。エンジン6および電動モータ7は、制御装置X1に接続されている。同様に、シフトアクチュエータ25およびリモコンユニット28cは、制御装置X1に接続されている。エンジン6、電動モータ7、およびシフトアクチュエータ25は、リモコンユニット28cから制御装置X1に入力された指令に基づいて、制御装置X1によって制御される。
【0065】
図11に示すように、エンジン6は、クランクシャフトの回転に伴って発電する発電機49(たとえば、フライホイールマグネトウ(flywheel magneto))を含む。発電機49は、制御装置X1に接続されている。制御装置X1は、バッテリー12に接続されている。発電機49で発生した電力は、制御装置X1を介してバッテリー12に供給される。また、エンジン6は、エンジン6の回転速度(クランクシャフトの回転速度)を検出するエンジン速度検出装置50をさらに含む。エンジン速度検出装置50は、制御装置X1に接続されている。同様に、プロペラ5の回転速度を検出するプロペラ速度検出装置43は、制御装置X1に接続されている。
【0066】
船舶推進装置1は、さらに、燃料タンク11内の燃料の残量を検出する燃料残量検出装置51と、バッテリー12内の電力の残量を検出する電力残量検出装置52と、乗船者に警報する警報装置53とを含む。燃料残量検出装置51は、燃料タンク11内に配置されたフロートの位置に基づいて燃料の残量を検出するフロートセンサーであってもよいし、空気と燃料との混合気を形成するために噴射された燃料の噴射量から燃料の残量を推定する燃料残量推定部であってもよい。また、電力残量検出装置52は、バッテリー12の電圧、またはバッテリー12の入力電流および出力電流の積算値から電力の残量を推定する電力残量推定部であってもよい。電力残量推定部は、制御装置X1に設けられていてもよいし、制御装置X1とは異なる装置に設けられていてもよい。同様に、燃料残量推定部は、制御装置X1に設けられていてもよいし、制御装置X1とは異なる装置に設けられていてもよい。
【0067】
燃料残量検出装置51、電力残量検出装置52、および警報装置53は、制御装置X1に接続されている。燃料タンク11内の燃料の残量が下限値に達すると、制御装置X1は、警報装置53から警報を発する。同様に、バッテリー12内の電力の残量が下限値に達すると、制御装置X1は、警報装置53から警報を発する。警報装置53は、光を発する発光装置であってもよいし、警報音を発する音発生装置であってもよいし、メッセージを表示する表示装置であってもよいし、光、音、メッセージのうちの2つ以上を用いて乗船者に警報する装置であってもよい。
【0068】
船舶推進装置1は、さらに、操船者によって操作される運転モード選択スイッチ54を含む。運転モード選択スイッチ54は、制御装置X1に接続されている。船舶推進装置1の運転モードは、操船者が運転モード選択スイッチ54を操作することにより選択される。制御装置X1は、操船者によって選択された運転モードで船舶推進装置1を運転する。船舶推進装置1の運転モードは、エンジン6だけにプロペラ5を駆動させるエンジンモードと、電動モータ7だけにプロペラ5を駆動させる電動モードと、エンジン6および電動モータ7の両方にプロペラ5を駆動させるアシストモードとを含む。さらに、船舶推進装置1の運転モードは、制御装置X1がコントロールレバー28d(図1A参照)の位置に応じてエンジンモード、電動モード、およびアシストモードのうちのいずれか一つを選択する自動選択モードを含む。
【0069】
図12は、コントロールレバー28dの操作量と船舶推進装置1の出力との関係を示すグラフである。
自動選択モードでコントロールレバー28dが前進位置または後進位置に配置されている場合、図12において太線で示すように、制御装置X1は、エンジン6および電動モータ7のうちから選択された動力源にプロペラ5を駆動させることにより、出力最小位置(前進出力最小位置Fminまたは後進出力最小位置Rmin)からのコントロールレバー28dの操作量に比例する大きさの出力を発生させる。
【0070】
具体的には、図12に示すように、コントロールレバー28dの操作量が、第1操作量以下の場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、電動モータ7だけにプロペラ5を駆動させる。この場合、制御装置X1は、エンジン6の稼動を停止させてもよいし、前後進切替機構19を中立状態に切り替えることにより、エンジン6の出力がプロペラ5に伝達されることを防止してもよい。
【0071】
また、コントロールレバー28dの操作量が、第1操作量より大きく、第2操作量以下の場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、エンジン6および電動モータ7にプロペラ5を駆動させる。図12に示すように、制御装置X1は、この範囲において、コントロールレバー28dの操作量の増加に伴ってエンジン6の出力を増加させると共に、電動モータ7の出力を低下させることにより、コントロールレバー28dの操作量に比例する大きさの出力を発生させてもよい。
【0072】
また、コントロールレバー28dの操作量が、第2操作量より大きい場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、エンジン6だけにプロペラ5を駆動させる。後述するように、操船者が船舶V1を急加速させる意図を有しておらず、かつバッテリー12の残量が上限値に達していなければ、制御装置X1は、電動モータ7で電力を発生させ、電動モータ7で発生した電力をバッテリー12に供給する。そのため、エンジン6からプロペラ5に伝達されたトルクとは反対方向のトルク(マイナスのトルク)が、電動モータ7からプロペラ5に加わり、出力が低下する。
【0073】
このように、自動選択モードでは、制御装置X1は、出力最小位置からのコントロールレバー28dの操作量に応じて、プロペラ5を駆動させる動力源を選択する。動力源を選択する基準となる第1操作量および第2操作量は、船舶推進装置1の状況に拘わらず一定の定数であってもよい。また、以下に説明するように、第1操作量および第2操作量は、コントロールレバー28dの操作状況やバッテリー12の残量などの船舶推進装置1の状況に応じて変化する変数であってもよい。
【0074】
図13Aは、船舶推進装置1が自動選択モードに設定されている状態でコントロールレバー28dが前進位置または後進位置に配置されているときのフローチャートである。図13Bは、レバー位置変化割合およびバッテリー12の残量と各モードの範囲との関係について説明するための図である。レバー位置変化割合は、単位時間当たりのコントロールレバー28dの位置の変化の割合である。
【0075】
コントロールレバー28dが前進位置または後進位置に配置されている場合、制御装置X1は、エンジン6および電動モータ7の両方が継続的に稼働できるか否かを判断する(S1)。具体的には、制御装置X1は、たとえば、燃料の残量が所定値以上であり、エンジン6の温度が所定値以下であるか否かを判断する。さらに、制御装置X1は、たとえば、バッテリー12の残量が所定値以上であるか否かを判断する。すなわち、制御装置X1は、燃料の残量が僅かでなく、エンジン6が高温になっていないことを確認する。さらに、制御装置X1は、バッテリー12に蓄えられている電力の残量が僅かでないことを確認する。
【0076】
エンジン6だけが継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S2)。同様に、電動モータ7だけが継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、エンジン6にプロペラ5を駆動させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S3)。また、エンジン6および電動モータ7の両方が継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、警報装置53(図11参照)から警報を発する(S4)。
【0077】
一方、エンジン6および電動モータ7の両方が継続的に稼働できる場合(S1でYesの場合)、制御装置X1は、リモコンユニット28cの検出値に基づいて、所定時間前(たとえば、演算を行う直前)から現在までのコントロールレバー28dの位置の変化の割合を求める。たとえばコントロールレバー28dが前進位置に配置されている場合には、制御装置X1は、前進出力最小位置Fmin(図1A参照)から前進出力最大位置Fmax(図1A参照)までの範囲に対してコントロールレバー28dが何%の割合で移動したかを求める。そして、制御装置X1は、レバー位置変化割合が所定値以上であるか否かを判断する(S5)。すなわち、制御装置X1は、船舶V1を急加速させるために操船者が大きな移動量でコントロールレバー28dを素早く移動させたか否かを判断する。
【0078】
レバー位置変化割合が所定値以上でない場合(S5でNoの場合)、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S6)。すなわち、操船者がコントロールレバー28dを移動させていない場合や、操船者がコントロールレバー28dをゆっくりと移動させた場合には、制御装置X1は、十分な量の電力がバッテリー12に残っているか否かを判断する。また、S5でレバー位置変化割合が所定値以上である場合(S5でYesの場合)も同様に、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S7)。
【0079】
S6でバッテリー12の残量が所定値以上である場合(S6でYesの場合)、制御装置X1は、第1操作量(図12参照)としてa1を設定し、第2操作量(図12参照)としてb1を設定する(S8)。また、S6でバッテリー12の残量が所定値以上でない場合(S6でNoの場合)、制御装置X1は、第1操作量としてa2を設定し、第2操作量としてb2を設定する(S9)。図13Bに示すように、a2は、a1より小さい零以上の値であり、b2は、b1より小さい零以上の値である。したがって、レバー位置変化割合が小さく、バッテリー12の残量が十分でない場合には、制御装置X1は、電動モータ7がプロペラ5を回転させる範囲(電動モードおよびアシストモード)を通常よりも狭める。
【0080】
一方、S7でバッテリー12の残量が所定値以上である場合(S7でYesの場合)、制御装置X1は、第1操作量としてa3を設定し、第2操作量としてb3を設定する(S10)。また、S7でバッテリー12の残量が所定値以上でない場合(S7でNoの場合)、制御装置X1は、第1操作量としてa4を設定し、第2操作量としてb4を設定する(S11)。図13Bに示すように、a3は、b3より小さい零以上の値であり、b3は、b1より大きい零以上の値である。したがって、レバー位置変化割合が大きく、バッテリー12の残量が十分である場合には、制御装置X1は、アシストモードの上限値を通常よりも増加させる。また、図13Bに示すように、a4は、a3より小さい零以上の値であり、b4は、b3より小さい零以上の値である。したがって、レバー位置変化割合が大きくても、バッテリー12の残量が十分でない場合には、制御装置X1は、バッテリー12の残量が十分である場合よりも電動モータ7がプロペラ5を回転させる範囲を狭める。
【0081】
すなわち、バッテリー12の残量が少ない場合には、電力の消費量を減少させるために、電動モータ7の出力を低下させたり、電動モータ7がプロペラ5を回転させる範囲を狭めたりすることが好ましい。したがって、図13Bの一段目(S8)と二段目(S9)とに示すように、レバー位置変化割合が同じであれば、バッテリー12の残量が少ないときの「a」および「b」の値は、バッテリー12の残量が多いときの値より小さいことが好ましい。同様に、図13Bの三段目(S10)と四段目(S11)とに示すように、レバー位置変化割合が同じであれば、バッテリー12の残量が少ないときの「a」および「b」の値は、バッテリー12の残量が多いときの値よりも小さいことが好ましい。
【0082】
また、レバー位置変化割合が大きいときには、操船者が船舶V1を急加速させる意図を有しているので、エンジン6だけがプロペラ5を回転させる範囲(エンジンモード)および電動モータ7がアシストする範囲(アシストモード)を広げることが好ましい。したがって、図13Bの一段目(S8)と三段目(S10)とに示すように、バッテリー12の残量が同じであれば、レバー位置変化割合が大きいときの「b」の値は、レバー位置変化割合が小さいときの値よりも大きいことが好ましい。同様に、図13Bの二段目(S9)と四段目(S11)とに示すように、バッテリー12の残量が同じであれば、レバー位置変化割合が大きいときの「b」の値は、レバー位置変化割合が小さいときの値よりも大きいことが好ましい。「a」の値については、レバー位置変化割合に応じて変化させてもよいし、変化させなくてもよい。低速時のトルクは、エンジン6より電動モータ7の方が大きい。したがって、レバー位置変化割合が大きいときの「a」の値は、レバー位置変化割合が小さいときの「a」の値と等しくてもよい。
【0083】
このように、制御装置X1は、レバー位置変化割合とバッテリー12の残量とに応じて、第1操作量および第2操作量を設定する。そして、図13Aに示すように、制御装置X1は、設定した第1操作量および第2操作量とコントロールレバー28dの現在位置とに基づいて、船舶推進装置1をいずれのモードで運転するかを選択する(S12)。電動モードが選択された場合、制御装置X1は、以下に説明する電動モードで船舶推進装置1を運転する(S13)。また、アシストモードが選択された場合、制御装置X1は、アシストモードで船舶推進装置1を運転する(S14)。すなわち、制御装置X1は、エンジン6および電動モータ7によってプロペラ5を回転させながら、コントロールレバー28dの位置に対応する大きさの出力を発生させる。また、エンジンモードが選択された場合、制御装置X1は、以下に説明するエンジンモードで船舶推進装置1を運転する(S15)。
【0084】
図13Cは、電動モードについて説明するためのフローチャートである。
電動モードでは、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S21)。すなわち、制御装置X1は、バッテリー12からの電力だけで電動モータ7を長時間駆動できるか否かを判断する。
バッテリー12の残量が所定値以上である場合(S21でYesの場合)、制御装置X1は、電動モータ7を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S22)。
【0085】
一方、バッテリー12の残量が所定値以上でない場合(S21でNoの場合)、制御装置X1は、ドッグクラッチ24(図3参照)を中立位置に位置させて、エンジン6をアイドル回転速度以上の回転速度で回転させる。そして、制御装置X1は、エンジン6の発電機49(図11参照)で発生した電力をバッテリー12に供給し、バッテリー12を充電する(S23)。続いて、制御装置X1は、バッテリー12を充電しながら、コントロールレバー28dの位置に対応する大きさの出力が発生するように、電動モータ7によってプロペラ5を駆動させる(S22)。
【0086】
図13Dは、エンジンモードについて説明するためのフローチャートである。
エンジンモードでは、制御装置X1は、レバー位置変化割合が所定値以上であるか否かを判断する(S31)。レバー位置変化割合が所定値以上である場合(S31でYesの場合)、制御装置X1は、船舶V1を加速させる方向にコントロールレバー28dが操作されたか否かを判断する(S32)。船舶V1を加速させる方向にコントロールレバー28dが操作された場合(S32でYesの場合)、制御装置X1は、たとえば電気回路を一時的に切断することにより、電動モータ7での発電を禁止させる(S33)。すなわち、制御装置X1は、電動モータ7がエンジン6の負荷として働くことを防止する。そして、制御装置X1は、エンジン6の出力を増加させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S34)。
【0087】
一方、レバー位置変化割合が所定値以上でない場合(S31でNoの場合)には、制御装置X1は、バッテリー12の残量が上限値に達しているか否かを判断する(S35)。同様に、レバー位置変化割合が所定値以上であっても、船舶V1を加速させる方向にコントロールレバー28dが操作されていな場合(S32でNoの場合)には、制御装置X1は、バッテリー12の残量が上限値に達しているか否かを判断する(S35)。そして、バッテリー12の残量が上限値に達していない場合(S35でNoの場合)には、制御装置X1は、エンジン6を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S36)。それと共に、制御装置X1は、電動モータ7で発生した電力をバッテリー12に供給する(S37)。一方、バッテリー12の残量が上限値に達している場合(S35でYesの場合)、制御装置X1は、バッテリー12の過充電を防止するために、電動モータ7での発電を禁止させる(S38)。そして、制御装置X1は、発電が禁止された状態で、エンジン6を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S39)。
【0088】
図14Aは、操船者がコントロールレバー28dを中立位置から前進位置または後進位置に移動させるシフトイン操作が行われたときのフローチャートである。
制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が中立位置であるか否かを判断する(S41)。シフト位置が中立位置である場合(S41でYesの場合)には、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が前進位置であるか否かを判断する(S42)。レバー位置が前進位置である場合(S42でYesの場合)、制御装置X1は、エンジン6の回転速度(絶対値)とプロペラ5の回転速度(絶対値)との差である速度差が第1しきい値以上であるか否かを判断する(S43)。具体的には、制御装置X1は、前側ギヤ22および後側ギヤ23の回転速度とドッグクラッチ24の回転速度との差が、小さいか否かを判断する。
【0089】
速度差が第1しきい値以上でない場合(S43でNoの場合)、制御装置X1は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を中立位置から前進位置に移動させる(S44)。これにより、ドッグクラッチ24が前側ギヤ22に噛み合い、エンジン6の回転がプロペラ5に伝達される。一方、速度差が第1しきい値以上である場合(S43でYesの場合)、制御装置X1は、エンジン6および電動モータ7の少なくとも一方を制御することにより、速度差を減少させる(S45)。
【0090】
制御装置X1が速度差を減少させるとき、制御装置X1は、エンジン6を制御することにより、前側ギヤ22および後側ギヤ23の回転速度を上昇または低下させてもよい。また、制御装置X1は、電動モータ7を制御することにより、ドッグクラッチ24の回転速度を上昇または低下させてもよい。当然、制御装置X1は、エンジン6および電動モータ7の両方を制御することにより、速度差を減少させてもよい。また、エンジン6の回転速度が低下している途中であれば、制御装置X1は、エンジン6の回転速度が所定値以下に低下するまで、電動モータ7の回転速度を一定に維持してもよい。
【0091】
制御装置X1は、速度差を減少させた後、再び、速度差が第1しきい値以上であるか否かを判断する(2回目のS43)。そして、速度差が第1しきい値以上でない場合(2回目のS43でNoの場合)には、制御装置X1は、ドッグクラッチ24を前進位置に移動させる(S44)。また、速度差が第1しきい値以上である場合(2回目のS43でYesの場合)には、制御装置X1は、再び速度差を減少させる(2回目のS45)。そして、制御装置X1は、速度差を第1しきい値より小さい値まで低下させる。
【0092】
一方、S42においてレバー位置が前進位置でない場合(S42でNoの場合)、制御装置X1は、レバー位置が後進位置であるか否かを判断する(S46)。そして、レバー位置が後進位置である場合(S46でYesの場合)、制御装置X1は、速度差が、第2しきい値以上であるか否かを判断する(S47)。第2しきい値は、第1しきい値と等しい値であってもよいし、第1しきい値より大きいまたは小さい値であってもよい。すなわち、シフト位置を中立位置から前進位置に切り替えるときのしきい値と、シフト位置を中立位置から後進位置に切り替えるときのしきい値とは、等しくてもよいし、異なっていてもよい。
【0093】
速度差が第2しきい値以上でない場合(S47でNoの場合)、制御装置X1は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を中立位置から後進位置に移動させる(S48)。これにより、ドッグクラッチ24が後側ギヤ23に噛み合い、エンジン6の回転がプロペラ5に伝達される。一方、速度差が第2しきい値以上である場合(S47でYesの場合)、S45と同様に、制御装置X1は、速度差を減少させる(S49)。そして、制御装置X1は、速度差を減少させた後、再び、速度差が第2しきい値以下であるか否かを判断する(2回目のS47)。
【0094】
図14Bは、操船者がコントロールレバー28dを前進位置または後進位置から中立位置に移動させるシフトアウト操作が行われたときのフローチャートである。
制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が前進位置または後進位置であるか否かを判断する(S51)。シフト位置が前進位置または後進位置である場合(S51でYesの場合)、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が中立位置であるか否かを判断する(S52)。レバー位置が中立位置である場合(S52でYesの場合)、すなわち、操船者がコントロールレバー28dを前進位置または後進位置から中立位置に移動させた場合、制御装置X1は、プロペラ5の回転速度が、切断速度(シフトアウト切断速度)以下であるか否かを判断する(S53)。切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。
【0095】
プロペラ5の回転速度が切断速度以下である場合(S53でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。これにより、ドッグクラッチ24が前側ギヤ22または後側ギヤ23から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度が切断速度以下でない場合(S53でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5の回転速度を低下させる(S55)。
【0096】
制御装置X1がプロペラ5の回転速度を低下させるとき、プロペラ5の回転速度が低下している途中である場合には、制御装置X1は、プロペラ5の回転速度が切断速度以下に低下するまで、電動モータ7の出力を一定に維持してもよい。また、制御装置X1は、電動モータ7の出力を低下させることにより、プロペラ5の回転速度を低下させてもよい。すなわち、電動モータ7の出力が低下すると、電動モータ7からの抵抗が、プロペラ5に加わる。これにより、プロペラ5の回転速度が低下する。さらに、シフト位置が前進位置または後進位置の状態でプロペラ5の回転速度が低下するので、プロペラ5だけでなく、エンジン6の回転速度も低下する。
【0097】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、切断速度以下であるか否かを判断する(2回目のS53)。そして、プロペラ5の回転速度が切断速度以下である場合(2回目のS53でYesの場合)には、制御装置X1は、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。また、プロペラ5の回転速度が切断速度以下でない場合(2回目のS53でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS55)。このようにして、制御装置X1は、プロペラ5の回転速度を切断速度以下まで低下させた後、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。
【0098】
図15Aは、操船者がコントロールレバー28dを前進位置および後進位置のいずれか一方から他方に移動させる反転操作が行われたときのフローチャートである。図15Bは、プロペラ5の回転方向を前進方向(正転方向)から後進方向(逆転方向)に反転させるF→R反転動作、およびプロペラ5の回転方向を後進方向から前進方向に反転させるR→F反転動作について説明するためのフローチャートである。
【0099】
図15Aに示すように、制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が前進位置であるか否かを判断する(S61)。シフト位置が前進位置である場合(S61でYesの場合)、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が後進位置であるか否かを判断する(S62)。レバー位置が後進位置である場合(S62でYesの場合)、すなわち、操船者がコントロールレバー28dを前進位置から後進位置に移動させた場合、制御装置X1は、F→R反転動作を実行する(S63)。具体的には、図15Bに示すように、制御装置X1は、プロペラ5の回転速度が、F→R切断速度以下であるか否かを判断する(S64)。F→R切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。さらに、F→R切断速度は、前述のシフトアウト切断速度と等しい速度であってもよいし、シフトアウト切断速度より高速または低速であってもよい。
【0100】
プロペラ5の回転速度がF→R切断速度以下である場合(S64でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。これにより、ドッグクラッチ24が前側ギヤ22から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度がF→R切断速度以下でない場合(S64でNoの場合)、制御装置X1は、電動モータ7を制御することにより、S55(図14B参照)と同様に、プロペラ5の回転速度を低下させる(S66)。
【0101】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、F→R切断速度以下であるか否かを判断する(2回目のS64)。そして、プロペラ5の回転速度がF→R切断速度以下である場合(2回目のS64でYesの場合)には、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。また、プロペラ5の回転速度がF→R切断速度以下でない場合(2回目のS64でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS66)。このようにして、制御装置X1は、プロペラ5の回転速度をF→R切断速度以下まで低下させた後、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。
【0102】
ドッグクラッチ24が中立位置に移動した後は、制御装置X1は、船舶推進装置1の運転モードが、アシストモードまたはエンジンモード(自動選択モードのアシストモードおよびエンジンモードを含む)であるか否かを確認する(S67)。運転モードがアシストモードまたはエンジンモードでない場合(S67でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S68)。すなわち、制御装置X1は、エンジン6とプロペラ5との機械的な接続が解除されている状態で、電動モータ7にプロペラ5を駆動させることにより、プロペラ5の回転方向を正転方向から逆転方向に切り替える。そして、制御装置X1は、電動モータ7によって、出力指令に対応するプロペラ回転速度までプロペラ5を逆転方向に加速させる。
【0103】
運転モードがアシストモードまたはエンジンモードである場合(S67でYesの場合)も同様に、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S69)。そして、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、F→R接続速度までプロペラ5を逆転方向に加速させる。その後、制御装置X1は、エンジン6の回転速度(絶対値)とプロペラ5の回転速度(絶対値)との差である速度差が、第3しきい値以上であるか否かを判断する(S70)。
【0104】
速度差が第3しきい値以上でない場合(S70でNoの場合)、制御装置X1は、ドッグクラッチ24を中立位置から後進位置に移動させる(S71)。これにより、ドッグクラッチ24が後側ギヤ23に噛み合い、エンジン6の回転がプロペラ5に伝達される。そのため、プロペラ5は、エンジン6および電動モータ7の両方によって逆転方向に駆動される。一方、速度差が第3しきい値以上である場合(S70でYesの場合)、制御装置X1は、S45(図14A参照)と同様に、エンジン6および電動モータ7を制御することにより、速度差を低下させる(S72)。そして、制御装置X1は、再び、速度差が第3しきい値以上であるか否かを判断する(2回目のS70)。
【0105】
一方、図15Aに示すように、S61においてシフト位置が前進位置でない場合(S61でNoの場合)には、制御装置X1は、シフト位置が後進位置であるか否かを判断する(S73)。シフト位置が後進位置である場合(S73でYesの場合)には、制御装置X1は、レバー位置が前進位置であるか否かを判断する(S74)。レバー位置が前進位置である場合(S74でYesの場合)、すなわち、操船者がコントロールレバー28dを後進位置から前進位置に移動させた場合、制御装置X1は、R→F反転動作を実行する(S75)。具体的には、図15Bに示すように、制御装置X1は、プロペラ5の回転速度が、R→F切断速度以下であるか否かを判断する(S64)。R→F切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。さらに、R→F切断速度は、前述のシフトアウト切断速度と等しい速度であってもよいし、シフトアウト切断速度より高速または低速であってもよい。当然、R→F切断速度は、F→R切断速度と等しい速度であってもよいし、F→R切断速度より高速または低速であってもよい。
【0106】
プロペラ5の回転速度がR→F切断速度以下である場合(S64でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。これにより、ドッグクラッチ24が後側ギヤ23から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度がR→F切断速度以下でない場合(S64でNoの場合)、制御装置X1は、S55(図14B参照)と同様に、プロペラ5の回転速度を低下させる(S66)。これにより、エンジン6およびプロペラ5の回転速度が低下する。
【0107】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、R→F切断速度以下であるか否かを判断する(2回目のS64)。そして、プロペラ5の回転速度がR→F切断速度以下である場合(2回目のS64でYesの場合)には、制御装置X1は、ドッグクラッチ24を後進位置から中立位置に移動させる(S65)。また、プロペラ5の回転速度がR→F切断速度以下でない場合(2回目のS64でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS66)。このようにして、制御装置X1は、プロペラ5の回転速度をR→F切断速度以下まで低下させた後、ドッグクラッチ24を後進位置から中立位置に移動させる(S65)。
【0108】
ドッグクラッチ24が中立位置に移動した後は、制御装置X1は、船舶推進装置1の運転モードが、アシストモードまたはエンジンモードであるか否かを確認する(S67)。運転モードがアシストモードまたはエンジンモードでない場合(S67でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S68)。すなわち、制御装置X1は、エンジン6とプロペラ5との機械的な接続が解除されている状態で、電動モータ7にプロペラ5を駆動させることにより、プロペラ5の回転方向を逆転方向から正転方向に切り替える。そして、制御装置X1は、電動モータ7によって、出力指令に対応するプロペラ回転速度までプロペラ5を正転方向に加速させる。
【0109】
運転モードがアシストモードまたはエンジンモードである場合(S67でYesの場合)も同様に、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S69)。そして、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、R→F接続速度までプロペラ5を正転方向に加速させる。その後、制御装置X1は、速度差が、第4しきい値以上であるか否かを判断する(S70)。
【0110】
速度差が第4しきい値以上でない場合(S70でNoの場合)、制御装置X1は、ドッグクラッチ24を中立位置から前進位置に移動させる(S71)。これにより、ドッグクラッチ24が前側ギヤ22に噛み合い、エンジン6の回転がプロペラ5に伝達される。そのため、プロペラ5は、エンジン6および電動モータ7の両方によって正転方向に駆動される。一方、速度差が第4しきい値以上である場合(S70でYesの場合)、制御装置X1は、S45(図14A参照)と同様に、エンジン6および電動モータ7を制御することにより、速度差を低下させる(S72)。そして、制御装置X1は、再び、速度差が第4しきい値以上であるか否かを判断する(2回目のS70)。
【0111】
以上のように本実施形態では、羽根30およびリム31を含むプロペラ5が、ダクト26によって取り囲まれている。エンジン6は、ダクト26に対して複数の羽根30をプロペラ軸線A2まわりに回転させる。同様に、電動モータ7は、ダクト26に対して複数の羽根30をプロペラ軸線A2まわりに回転させる。プロペラ5は、エンジン6および電動モータ7のいずれか一方、またはエンジン6および電動モータ7の両方によってプロペラ軸線A2まわりに回転駆動される。これにより、船舶V1を推進させる推力が発生する。このように、エンジン6および電動モータ7が、互いに独立してプロペラ5を回転させることができるので、船舶推進装置1の構造を簡素化できる。さらに、推進ユニット4がロワーケース15に取り付けられているので、船外機3の下部(ロワーユニット)以外の構成については既存の船外機と同じ部品を使用できる。さらに、船舶V1の航走状態では電動モータ7が水中に配置されるから、電動モータ7が発するモータ音が乗船者に伝わり難い。そのため、船舶推進装置1の静粛性を高めることができる。
【0112】
[第2実施形態]
次に、この発明の第2実施形態について説明する。
この第2実施形態と前述の第1実施形態との主要な相違点は、推進ユニットがロワーケースの前方に配置されていることである。
図16Aは、この発明の第2実施形態に係る船舶推進装置201の下部の部分断面図である。図16Bは、この発明の第2実施形態に係る推進ユニット4の断面図である。図16Aおよび図16Bにおいて、前述の図1〜15に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0113】
第2実施形態に係る船舶推進装置201は、船外機3の下部(ロワーユニット)を除き、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、船舶推進装置201は、第1実施形態に係るロワーケース15に代えて、ロワーケース215を含む。図16Aに示すように、ロワーケース215は、ロワーケース215の後部に設けられた排気部255を含む。排気部255は、エンジン6(図1A参照)で生成された排気を後方に排出する排気口を形成している。推進ユニット4は、ロワーケース215の前方に配置されている。したがって、プロペラ5は、前後進切替機構19の前方に配置されている。推進ユニット4は、ステー17を介してロワーケース215に連結されている。図16Bに示すように、エンジン出力伝達軸20の前端部は、ロワーケース215から前方に突出している。エンジン出力伝達軸20の前端部は、内軸部32を前後方向に貫通している。内軸部32は、ボルト35によってエンジン出力伝達軸20の前端部に連結されている。回転軸29の前端部は、前方に凸の半球状のカバー256によって覆われている。
【0114】
[第3実施形態]
次に、この発明の第3実施形態について説明する。
この第3実施形態と前述の第1実施形態との主要な相違点は、推進ユニットがロワーケースの下方に配置されていることである。
図17Aは、この発明の第3実施形態に係る船舶推進装置301の下部の部分断面図である。図17Bは、この発明の第3実施形態に係る推進ユニット4の背面図である。図17Cは、この発明の第3実施形態に係る推進ユニット4の断面図である。図17Aおよび図17Cにおいて、前述の図1〜16Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0115】
第3実施形態に係る船舶推進装置301は、船外機3の下部(ロワーユニット)を除き、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、船舶推進装置301は、第1実施形態に係るロワーケース15に代えて、ロワーケース315を含む。さらに、船舶推進装置301は、第1実施形態に係る推進ユニット4に代えて、推進ユニット304を含む。推進ユニット304は、プロペラを除き、第1実施形態に係る推進ユニット4と同様に構成を備えている。すなわち、推進ユニット304は、第1実施形態に係るプロペラ5に代えて、プロペラ305を含む。
【0116】
図17Aに示すように、ロワーケース315は、ロワーケース315の後部に設けられた排気部255を含む。推進ユニット304は、ロワーケース315の下方に配置されている。ダクト26の上端部は、ロワーケース315に結合されている。プロペラ305は、ドッグクラッチ24より下方に配置されている。図17Bに示すように、プロペラ305は、複数の羽根30と、リム31とを含む。すなわち、プロペラ305は、第1実施形態に係るプロペラ5とは異なり、回転軸29が設けられていない。リム31は、複数のベアリングB1〜B3(図7Aおよび図7B参照)を介してダクト26に保持されている。これにより、プロペラ305がダクト26に保持されている。
【0117】
図17Cに示すように、船舶推進装置301は、エンジン6の動力をリム31に伝達する歯車伝達機構357をさらに含む。歯車伝達機構357は、エンジン出力伝達軸20に連結された駆動ギヤ358と、リム31の外周に設けられた従動ギヤ359とを含む。駆動ギヤ358および従動ギヤ359は、互いに噛み合っていてもよいし、共通の中間ギヤに噛み合っていてもよい。図17Cでは、駆動ギヤ358が、従動ギヤ359に噛み合っている状態が示されている。駆動ギヤ358は、エンジン出力伝達軸20と共に回転し、従動ギヤ359は、リム31と共に回転する。エンジン出力伝達軸20の回転は、歯車伝達機構357によって減速された状態でリム31に伝達される。これにより、エンジン6の動力が増幅された状態でリム31に伝達され、プロペラ305が、ダクト26に対してプロペラ軸線A2まわりに回転する。
【0118】
[第4実施形態]
次に、この発明の第4実施形態について説明する。
この第4実施形態と前述の第2実施形態との主要な相違点は、プロペラのピッチ(プロペラが一回転して進む距離)が変更可能であることである。
図18は、この発明の第4実施形態に係る推進ユニット404の断面図である。図19Aおよび図19Bは、プロペラ軸線A2に対する羽根30の傾き角度について説明するための図である。図18〜図19Bにおいて、前述の図1〜図17Cに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0119】
第4実施形態に係る船舶推進装置401は、推進ユニットを除き、第2実施形態に係る船舶推進装置201と同様の構成を備えている。すなわち、図18に示すように、船舶推進装置401は、推進ユニット4に代えて、推進ユニット404を含む。推進ユニット404は、プロペラ軸線A2まわりに回転可能なプロペラ405と、プロペラ軸線A2まわりにプロペラ405を回転させる電動モータ407と、プロペラ軸線A2まわりにプロペラ405を取り囲むダクト26と含む。プロペラ405は、ダクト26によって保持されている。プロペラ405およびダクト26は、同軸的に配置されている。
【0120】
図18に示すように、プロペラ405は、プロペラ軸線A2に沿って延びる筒状の前側回転軸462および後側回転軸463と、前側回転軸462および後側回転軸463の周囲に配置された複数の羽根30と、複数の羽根30を取り囲む円筒状のリム430とを含む。図18〜図19Bでは、1つの羽根30だけを図示しており、他の羽根30の図示を省略している。各羽根30は、リム430によって支持されている。リム430は、複数の羽根30を取り囲む円筒状の前側リム460と、前側リム460の後方で複数の羽根30を取り囲む後側リム461とを含む。
【0121】
図18に示すように、前側回転軸462は、2つのスラストベアリングB401と2つのラジアルベアリングB402とを介して、プロペラ軸線A2に沿って延びる中心軸464に支持されている。中心軸464は、カバー256に固定されている。カバー256は、図示しない固定部材によってダクト26に固定されている。したがって、前側回転軸462は、ダクト26に対してプロペラ軸線A2まわりに回転可能である。前側回転軸462は、図示しない固定部材によって前側リム460に固定されている。したがって、前側リム460は、前側回転軸462によって支持されている。
【0122】
一方、図18に示すように、後側回転軸463は、前側回転軸462の後方に配置されている。前側回転軸462および後側回転軸463は、互いに等しい外径を有している。エンジン出力伝達軸20の前端部は、後側回転軸463内に挿入されている。後側回転軸463は、一体回転可能にエンジン出力伝達軸20に連結されている。後側回転軸463は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。後側回転軸463は、前側回転軸462に対してプロペラ軸線A2まわりに回転可能である。後述するように、後側回転軸463は、複数の羽根30を介して後側リム461に連結されている。後側回転軸463は、羽根30および後側リム461と共にプロペラ軸線A2まわりに回転可能である。
【0123】
図18に示すように、前側リム460および後側リム461は、ダクト26の内側でプロペラ軸線A2を取り囲んでいる。前側リム460は、ダクト26の内周部に設けられた前側環状溝465に収容されている。前側環状溝465は、ダクト26の内周面より凹んでおり、全周に亘って連続している。前側リム460およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。前側リム460は、前側環状溝465内に収容された状態で、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0124】
同様に、図18に示すように、後側リム461は、ダクト26の内周部に設けられた後側環状溝466に収容されている。後側環状溝466は、ダクト26の内周面より凹んでおり、全周に亘って連続している。後側リム461およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。後側リム461は、後側環状溝466内に収容された状態で、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0125】
図18に示すように、電動モータ407は、ダクト26の一部によって構成された環状のステータ441と、前側リム460の一部によって構成された円筒状のロータ442とを含む。すなわち、ダクト26は、ダクト26の外周面と前側環状溝465の底面との間に配置されたステータ441を含み、前側リム460は、前側リム460の外周部に設けられたロータ442を含む。電動モータ407は、前側リム460をプロペラ軸線A2まわりに回転させる。後述するように、前側リム460は、羽根30の前端部に連結されており、羽根30の後端部は、後側リム461に連結されている。したがって、電動モータ407が前側リム460を回転させると、電動モータ407の動力が、羽根30および後側リム461に伝達される。これにより、プロペラ405全体がプロペラ軸線A2まわりに回転する。
【0126】
図19Aに示すように、推進ユニット404は、前側リム460および後側リム461の相対回転量を規制する外周側規制部467をさらに含む。外周側規制部467は、羽根30の前端部に設けられた前側被支持部468と、前側リム460に設けられた前側支持部469とを含む。さらに、外周側規制部467は、羽根30の後端部に設けられた後側被支持部470と、後側リム461に設けられた後側支持部471とを含む。さらに、外周側規制部467は、羽根30の内端部に設けられた内側被支持部472と、後側回転軸463に設けられた内側支持部473とを含む。
【0127】
図19Aに示すように、前側支持部469は、前側リム460の内周面に配置されており、後側支持部471は、後側リム461の内周面に配置されている。前側支持部469は、前側リム460の内周面から突出する棒状の突起であり、後側支持部471は、後側リム461の内周面から突出する棒状の突起である。前側支持部469は、前側被支持部468によって区画された前側挿入孔468a内に挿入されている。同様に、後側支持部471は、後側被支持部470によって区画された後側挿入孔470a内に挿入されている。また、図19Aおよび図19Bでは、後側回転軸463と内側支持部473とが離れている状態が示されているが、内側支持部473は、後側回転軸463に固定されており、後側回転軸463から外方に突出している。後側回転軸463は、後側回転軸463の外周面から突出する棒状の突起である。後側回転軸463は、内側被支持部472によって区画された内側挿入孔472a内に挿入されている。
【0128】
図19Aに示すように、前側挿入孔468aおよび内側挿入孔472aは、プロペラ軸線A2に対して傾いた方向(長手方向)に延びる長孔であり、後側挿入孔470aは、概ね円形である。前側被支持部468は、前側支持部469まわりに回転可能に前側支持部469に支持されている。同様に、後側被支持部470は、後側支持部471まわりに回転可能に後側支持部471に支持されており、内側被支持部472は、内側支持部473まわりに回転可能に内側支持部473に支持されている。さらに、前側挿入孔468aが長孔であるから、前側被支持部468は、前側支持部469に対して、前側挿入孔468aの長手方向に移動可能である。前側支持部469に対する前側被支持部468の移動量は、前側支持部469と前側被支持部468(前側挿入孔468aの内面)との接触によって規制される。同様に、内側挿入孔472aが長孔であるから、内側被支持部472は、内側支持部473に対して、内側挿入孔472aの長手方向に移動可能である。内側支持部473に対する内側被支持部472の移動量は、内側支持部473と内側被支持部472(内側挿入孔472aの内面)との接触によって規制される。前側リム460および後側リム461の相対回転は、前側支持部469と前側被支持部468との接触や、内側支持部473と内側被支持部472との接触によって規制される。
【0129】
また、図19Aに示すように、推進ユニット404は、前側回転軸462および後側回転軸463の相対回転量を規制することにより、前側リム460および後側リム461の相対回転量を規制する中心側規制部474をさらに含む。中心側規制部474によって許容される前側リム460および後側リム461の相対回転量は、外周側規制部467によって許容される前側リム460および後側リム461の相対回転量と等しくてもよいし、異なっていてもよい。すなわち、前側リム460および後側リム461の相対回転量は、中心側規制部474および外周側規制部467によって規制されてもよいし、中心側規制部474または外周側規制部467によって規制されてもよい。
【0130】
中心側規制部474は、前側回転軸462および後側回転軸463にそれぞれ設けられた前側噛み合い部475および後側噛み合い部476を含む。前側噛み合い部475は、前側回転軸462の後端部に設けられており、後側噛み合い部476は、後側回転軸463の前端部に設けられている。前側噛み合い部475は、後方に突出する複数の凸部を含み、後側噛み合い部476は、前方に突出する複数の凸部を含む。前側噛み合い部475および後側噛み合い部476は、互いに噛み合っている。前側噛み合い部475および後側噛み合い部476は、所定の角度範囲内でプロペラ軸線A2まわりに相対回転可能である。すなわち、前側回転軸462および後側回転軸463の相対回転量が所定値に達すると、前側噛み合い部475の凸部と後側噛み合い部476の凸部とが接触し、前側回転軸462および後側回転軸463の相対回転が規制される。
【0131】
図19Aおよび図19Bにおいて黒と白の矢印で示すように、前側リム460および後側リム461が、プロペラ軸線A2まわりに相対回転すると、前側被支持部468が、前側支持部469に対して前側挿入孔468aの長手方向に移動する。それと共に、後側被支持部470が、後側支持部471に対して後側支持部471まわりに回転する。そのため、プロペラ軸線A2に対する羽根30の傾き角度が変化する。羽根30の傾き角度の変化量は、前側リム460および後側リム461の相対回転量の増加に伴って増加する。そして、前側リム460および後側リム461の相対回転量が所定値に達すると、外周側規制部467および中心側規制部474の少なくとも一方によって、前側リム460および後側リム461の相対回転が規制される。これにより、前側リム460および後側リム461の相対回転量が規制される。
【0132】
エンジン6(図1A参照)の動力がエンジン出力伝達軸20に伝達されると、図19Aにおいて黒と白の矢印で示すように、前側リム460および後側リム461の位相が一致した状態で(同位相の状態で)、前側リム460および後側リム461が回転する。このとき、各羽根30は、前側支持部469が前側被支持部468に対して後側に偏った状態で、前側リム460および後側リム461と共にプロペラ軸線A2まわりに回転する。一方、電動モータ407が前側リム460を回転させると、図19Bにおいて黒と白の矢印で示すように、前側リム460の位相が後側リム461の位相より進んだ状態で(前側リム460が進角した状態で)、前側リム460および後側リム461が回転する。このとき、各羽根30は、前側支持部469が前側被支持部468に対して前側に偏った状態で、前側リム460および後側リム461と共にプロペラ軸線A2まわりに回転する。
【0133】
図19Aおよび図19Bを比較すると分かるように、前側リム460の位相と後側リム461の位相とが一致している状態と、前側リム460の位相が後側リム461の位相より進んだ状態とでは、プロペラ軸線A2に対する羽根30の傾き角度が異なっている。プロペラ405のピッチは、プロペラ軸線A2に対する羽根30の傾き角度に応じて変化する。したがって、制御装置X1は、エンジン6および電動モータ407を制御することにより、前側リム460および後側リム461が相対回転できる範囲内でプロペラ405のピッチを二段階で調整できる。そのため、制御装置X1は、プロペラ405の特性を高トルク型と高出力型との間で変化させることができる。
【0134】
[第5実施形態]
次に、この発明の第5実施形態について説明する。
この第5実施形態と前述の第4実施形態との主要な相違点は、プロペラのピッチが変更可能であり、前側リムを回転駆動する前側電動モータと、後側リムを回転駆動する後側電動モータとが設けられていることである。
【0135】
図20は、この発明の第5実施形態に係る推進ユニット504の断面図である。図21Aおよび図21Bは、プロペラ軸線A2に対する羽根30の傾き角度について説明するための図である。図20〜図21Bにおいて、前述の図1〜図19Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第5実施形態に係る船舶推進装置501は、推進ユニット404を除き、第4実施形態に係る船舶推進装置401と同様の構成を備えている。すなわち、図20に示すように、船舶推進装置501は、推進ユニット404に代えて、推進ユニット504を含む。推進ユニット504は、電動モータ407を除き、第4実施形態に係る推進ユニット404と同様の構成を備えている。すなわち、推進ユニット504は、電動モータ407に代えて、電動モータ507を含む。
【0136】
図20に示すように、電動モータ507は、プロペラ軸線A2まわりに前側リム460を回転させる前側電動モータ577と、プロペラ軸線A2まわりに後側リム461を回転させる後側電動モータ578とを含む。前側電動モータ577および後側電動モータ578は、モータECU9によって制御される。前側電動モータ577および後側電動モータ578は、同種のモータであってもよいし、異なる種類のモータであってもよい。たとえば、前側電動モータ577が、永久磁石型直流モータであり、後側電動モータ578が、スイッチドリラクタンスモータであってもよい。
【0137】
図20に示すように、前側電動モータ577は、ダクト26の一部によって構成された環状の前側ステータ579と、前側リム460の一部によって構成された円筒状の前側ロータ580とを含む。すなわち、ダクト26は、ダクト26の外周面と前側環状溝465の底面との間に配置された前側ステータ579を含み、前側リム460は、前側リム460の外周部に設けられた前側ロータ580を含む。前側ステータ579および前側ロータ580は、プロペラ軸線A2を取り囲んでいる。前側ステータ579および前側ロータ580は、間隔を空けてプロペラ405の径方向に対向している。
【0138】
同様に、後側電動モータ578は、ダクト26の一部によって構成された環状の後側ステータ581と、後側リム461の一部によって構成された円筒状の後側ロータ582とを含む。すなわち、ダクト26は、ダクト26の外周面と後側環状溝466の底面との間に配置された後側ステータ581を含み、後側リム461は、後側リム461の外周部に設けられた後側ロータ582を含む。後側ステータ581および後側ロータ582は、プロペラ軸線A2を取り囲んでいる。後側ステータ581および後側ロータ582は、間隔を空けてプロペラ405の径方向に対向している。
【0139】
図21Aにおいて黒と白の矢印で示すように、制御装置X1は、前側電動モータ577および後側電動モータ578を制御することにより、前側リム460および後側リム461の位相が一致した状態で、前側リム460および後側リム461を回転させる。また、図21Bにおいて黒と白の矢印で示すように、制御装置X1は、前側電動モータ577および後側電動モータ578を制御することにより、前側リム460の位相が後側リム461の位相より進んだ状態で、前側リム460および後側リム461を回転させる。制御装置X1は、前側リム460および後側リム461の位相を個別に制御できる。したがって、制御装置X1は、前側リム460および後側リム461が相対回転できる範囲内でプロペラ405のピッチを無段階で調整できる。
【0140】
[第6実施形態]
次に、この発明の第6実施形態について説明する。
この第6実施形態と前述の第1実施形態との主要な相違点は、ダクトの内周面とリムの外周面との間への異物の進入を防止する防塵構造が設けられていることである。
図22Aおよび図22Bは、この発明の第6実施形態に係る推進ユニット604の外周部の断面図である。図23は、図22Bに示す推進ユニット604の一部を拡大した斜視図である。図22A〜図23において、前述の図1〜図21Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0141】
第6実施形態に係る船舶推進装置601の推進ユニット604は、第1実施形態に係る推進ユニット4と同様の構成を備えている。すなわち、推進ユニット604は、第1実施形態に係る推進ユニット4の構成に加えて、ダクト26の内周面とリム31の外周面との間への異物の進入を防止する防塵構造683を備えている。防塵構造683は、図22Aに示すシール684を含む構成であってもよいし、図22Bに示す防塵リング686を含む構成であってもよい。
【0142】
具体的には、図22Aに示す防塵構造683は、前後方向に間隔を空けて配置された二対のシール684および固定リング685を含む。シール684は、全周に亘って連続した環状である。前側のシール684は、リム31の前端部に配置されており、後側のシール684は、リム31の後端部に配置されている。シール684は、全周に亘ってリム31に接している。シール684は、対の固定リング685を取り囲んでいる。シール684は、対の固定リング685に保持されている。シール684は、固定リング685によってリム31に押し付けられている。これにより、シール684がリム31に密着している。固定リング685は、シール684の内側からダクト26の内側に延びている。固定リング685は、ダクト26に固定されている。したがって、シール684は、対の固定リング685を介してダクト26に固定されている。リム31がダクト26に対してプロペラ軸線A2まわりに回転すると、リム31およびシール684は、シール684がリム31に密着した状態で、プロペラ軸線A2まわりに相対回転する。
【0143】
ダクト26の内周面とリム31の外周面との間の空間には、潤滑剤が充填されている。前側の対のシール684および固定リング685は、リム31の前端部とダクト26との間の軸方向への隙間を塞いでおり、後側の対のシール684および固定リング685は、リム31の後端部とダクト26との間の軸方向への隙間を塞いでいる。したがって、ダクト26の内周面とリム31の外周面との間の空間は、防塵構造683によって密閉されている。そのため、ダクト26とリム31との間から潤滑剤が漏れることが防止される。さらに、小石や水などの異物が、ダクト26とリム31との間に進入することが防止される。
【0144】
一方、図22Bに示す防塵構造683は、前後方向に間隔を空けて配置された2つの防塵リング686を含む。防塵リング686は、ダクト26に固定されている。前側の防塵リング686は、ダクト26の前端部の内側から後方に延びている。前側の防塵リング686の後端部とダクト26の前端部との間には、軸方向への隙間G1が設けられている。同様に、後側の防塵リング686は、ダクト26の後端部の内側から前方に延びている。後側の防塵リング686の前端部とダクト26の後端部との間には、軸方向への隙間G1が設けられている。
【0145】
前側の防塵リング686は、後端部から前方に延びる複数のスリット687を含む。同様に、後側の防塵リング686は、前端部から後方に延びる複数のスリット687を含む。複数のスリット687は、周方向に等間隔で配列されている。図23に示すように、スリット687は、周方向に対向する2つの傾斜面688の間に設けられている。スリット687は、ダクト26の内周面とリム31の外周面との間の空間に通じている。防塵リング686の最小隙間G2(スリット687の最小幅)は、防塵リング686とリム31との間の軸方向への最小隙間G1より狭い。さらに、防塵リング686とリム31との間の軸方向への最小隙間G1は、ダクト26とリム31との間の径方向への最小隙間G3より狭い。
【0146】
ダクト26内に進入した水は、一方の防塵リング686とリム31との間の隙間G1や、一方の防塵リング686の隙間G2を通過して、ダクト26の内周面とリム31の外周面との間の空間に流入する。そして、この水は、他方の防塵リング686とリム31との間の隙間G1や、他方の防塵リング686の隙間G2を通過して、ダクト26の内周面とリム31の外周面との間の空間から流出する。隙間G1および隙間G2より大きな異物は、防塵リング686およびリム31によって、ダクト26の内周面とリム31の外周面との間の空間への進入が防止される。さらに、隙間G1および隙間G2が、ダクト26とリム31との間の径方向への隙間G3より狭いので、隙間G3より大きな異物が、ダクト26とリム31との間に進入して、リム31の回転が阻害されることを防止できる。しかも、水が、ダクト26とリム31との間を流れるので、ダクト26とリム31との間に存在する微小な異物を水流によって排出できる。
【0147】
[第7実施形態]
次に、この発明の第7実施形態について説明する。
この第7実施形態と前述の第2実施形態との主要な相違点は、光を発する発光体が、プロペラに配置されていることである。
図24は、この発明の第7実施形態に係る推進ユニット204の背面図である。図25Aおよび図25Bは、この発明の第7実施形態に係る推進ユニット204の一部の断面図である。図24〜図25Bにおいて、前述の図1〜図23に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0148】
第7実施形態に係る船舶推進装置701は、第2実施形態に係る船舶推進装置201と同様の構成を備えている。すなわち、図25Aおよび図25Bに示すように、船舶推進装置701は、第2実施形態に係る船舶推進装置201の構成に加えて、光を発する複数の発光体789と、電力を発生する発電装置790と、発電装置790から発光体789に電力を供給する複数の基板791(フレキシブルプリント基板)とを含む。発光体789は、電灯であってもよいし、LED(発光体ダイオード)であってもよい。図24に示すように、各羽根30は、複数の発光体789を保持している。共通の羽根30に保持されている複数の発光体789は、径方向に延びる直線状の列を構成している。
【0149】
図25Aおよび図25Bに示すように、発光体789は、羽根30に埋め込まれており、その一部が、羽根30の背面から露出している。複数の基板791は、それぞれ、複数の羽根30に埋め込まれている。基板791は、共通の羽根30に保持されている複数の発光体789に電気的に接続されている。基板791には、発光体789に供給される電力を制御する電気回路が実装されている。基板791は、発電装置790に電気的に接続されている。基板791は、発電装置790から発光体789に電力を供給することにより、発光体789を発光させる。発電装置790は、図25Aに示す発電用コイル792を含む構成であってもよいし、図25Bに示す発電用コイル792および発電用マグネット793を含む構成であってもよい。
【0150】
具体的には、図25Aに示す発電装置790は、リム31に取り付けられた複数の発電用コイル792を含む。発電用コイル792は、ステータ41に対向する位置でリム31に取り付けられている。発電用コイル792は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、ステータ41および発電用コイル792が相対回転し、発電用コイル792を通過する磁束が変化する。そのため、発電用コイル792に電流(誘導電流)が発生する。したがって、電動モータ7がプロペラ5を回転させると、発光体789が発光する。
【0151】
基板791は、発電用コイル792で発生する電流値に応じて発光体789の発光状態を変化させる。発電用コイル792で発生する電流は、プロペラ5の回転速度に応じて変化する。さらに、プロペラ5の回転速度が同じであっても、高トルクでプロペラ5を回転させる場合には、ステータ41に供給される電力が低トルクの場合よりも大きいので、発電用コイル792で発生する電流が増加する。したがって、発光体789の発光状態は、回転速度およびトルクを含むプロペラ5の回転状態に応じて変化する。
【0152】
一方、図25Bに示す発電装置790は、リム31に取り付けられた複数の発電用コイル792と、ダクト26に取り付けられた複数の発電用マグネット793とを含む。発電用コイル792および発電用マグネット793は、径方向に対向している。発電用コイル792は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、発電用コイル792および発電用マグネット793が相対回転し、発電用コイル792を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、発電用コイル792および発電用マグネット793が相対回転し、発電用コイル792を通過する磁束が変化する。そのため、発電用コイル792に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0153】
[第8実施形態]
次に、この発明の第8実施形態について説明する。
この第8実施形態と前述の第1実施形態との主要な相違点は、光を発する発光体が、ダクトに配置されていることである。
図26は、この発明の第8実施形態に係る推進ユニット4の背面図である。図27Aおよび図27Bは、この発明の第8実施形態に係る推進ユニット4の一部の断面図である。図26〜図27Bにおいて、前述の図1〜図25Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0154】
第8実施形態に係る船舶推進装置801は、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、図27Aおよび図27Bに示すように、船舶推進装置801は、第2実施形態に係る船舶推進装置1の構成に加えて、光を発する複数の発光体789と、電力を発生する発電装置890と、発電装置890から発光体789に電力を供給する複数の基板791とを含む。図26に示すように、ダクト26は、複数の発光体789を保持している。ダクト26に保持されている複数の発光体789は、ダクト26の背面に沿って環状に配置されている。
【0155】
図27Aおよび図27Bに示すように、発光体789は、ダクト26に埋め込まれており、その一部が、ダクト26の背面から露出している。複数の基板791は、ダクト26に埋め込まれている。基板791は、複数の発光体789に電気的に接続されている。さらに、基板791は、発電装置890に電気的に接続されている。基板791は、発電装置890から発光体789に電力を供給することにより、発光体789を発光させる。発電装置890は、図27Aに示す発電用コイル894を含む構成であってもよいし、図27Bに示す発電用コイル894および発電用マグネット895を含む構成であってもよい。
【0156】
具体的には、図27Aに示す発電装置890は、ダクト26に取り付けられた複数の発電用コイル894を含む。発電用コイル894は、マグネット47に対向する位置でダクト26に取り付けられている。電動モータ7がプロペラ5を回転させると、マグネット47および発電用コイル894が相対回転し、発電用コイル894を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、マグネット47および発電用コイル894が相対回転し、発電用コイル894を通過する磁束が変化する。そのため、発電用コイル894に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0157】
一方、図27Bに示す発電装置890は、ダクト26に取り付けられた複数の発電用コイル894と、リム31に取り付けられた複数の発電用マグネット895とを含む。発電用コイル894および発電用マグネット895は、径方向に対向している。発電用マグネット895は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、発電用コイル894および発電用マグネット895が相対回転し、発電用コイル894を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、発電用コイル894および発電用マグネット895が相対回転し、発電用コイル894を通過する磁束が変化する。そのため、発電用コイル894に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0158】
[他の実施形態]
この発明の第1〜第8実施形態の説明は以上であるが、この発明は、前述の第1〜第8実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1〜第8実施形態では、電動モータが、ラジアル方向に対向するステータおよびロータを含むラジアルギャップモータである場合について説明した。しかし、電動モータは、アキシャル方向に対向するステータおよびロータを含むアキシャルギャップモータであってもよい。
【0159】
また、前述の第1〜第8実施形態のうちの少なくとも2つの構成が組み合わされてもよい。たとえば、前述の第3実施形態では、プロペラの中心部に回転軸が設けられていない構造について説明した。しかし、第1実施形態に係るプロペラの回転軸が、第3実施形態に係るプロペラの中心部に設けられていてもよい。すなわち、第1実施形態に係る構成と、第2実施形態に係る構成とが組み合わされてもよい。また、前述の第3〜6実施形態では、発光体が設けられていない場合について説明した。しかし、第7および第8実施形態に係る発光体が、第3〜6実施形態に係る推進ユニットに設けられていてもよい。
【0160】
また、前述の第1〜第8実施形態では、モータECUが、プロペラ速度検出装置の検出値に基づいてプロペラの回転速度を検出する場合について説明した。しかし、モータECUは、電動モータの誘起電圧から電動モータの回転角(ロータの位置)を検出し、電動モータの回転角に基づいてプロペラの回転速度を求めてもよい。すなわち、電動モータの誘起電圧からプロペラの回転速度を検出するプロペラ回転速度検出部が、モータECUに設けられていてもよい。この場合、プロペラ速度検出装置は設けられていなくてもよい。
【0161】
また、前述の第1〜第8実施形態では、エンジンECUおよびモータECUが船内に配置された共通のバッテリーに接続される場合について説明したが、エンジンECUとモータECUとはそれぞれ別のバッテリーに接続されていてもよい。これにより、モータの高出力化のために、モータECUに接続されたバッテリーを高電圧化することができる。この際、2つのバッテリーが、DC−DCコンバータを介して接続されており、2つのバッテリーの間で1方向または双方向の電力補完が行われてもよい。
【0162】
また、前述の第8実施形態では、プロペラの回転に伴って電力を発生する発電装置からの電力が、発光体に供給される場合について説明した。しかし、第8実施形態のように、発光体が、固定部分(ダクト)に配置されている場合、発電装置が設けられていなくてもよい。すなわち、電動モータに電力を供給するモータ電力源(バッテリー)からの電力が発光体に供給されてもよい。この場合、モータECUが、発光体への電力供給を制御することにより、発光体の発光状態を制御してもよい。
【0163】
また、前述の第1〜第8実施形態では、電動モータがプロペラを直接回転させる場合について説明した。しかし、電動モータは、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)を回転させることにより、プロペラを回転させてもよい。すなわち、電動モータは、前後進切替機構より下流の部分(中間部材またはプロペラ)を回転させるように構成されていればよい。この構成によれば、前後進切替機構がいずれの状態であっても、電動モータは、プロペラを回転させることができる。したがって、電動モータは、前後進切替機構がいずれの状態であっても、エンジンの回転速度とプロペラの回転速度との差を変更することができる。
【0164】
また、前述の第1実施形態では、図12に示すように、レバー位置が出力の大きさに対応している場合について説明した。しかし、レバー位置がプロペラの回転速度に対応していてもよい。
具体的には、動力源がエンジンしか設けられていない船舶推進装置では、レバー位置がスロットル開度に対応しているので、レバー位置とプロペラの回転速度との関係は、船舶の負荷状態等に応じて変化する。さらに、エンジンがアイドリングしている状態でのプロペラの回転速度に対応する速度より低速で船舶を推進する場合には、ドッグクラッチの断続を繰り返す必要がある。さらに、前後進切替機構が中立状態でも、前後進切替機構内のオイル等によってエンジン出力伝達軸が回され、プロペラが回転する。したがって、プロペラの回転を完全に停止させることができない。そのため、動力源がエンジンしか設けられていない船舶推進装置では、レバー位置とプロペラの回転速度との関係が一定でない。
【0165】
一方、第1〜第8実施形態に係るハイブリッド式の船舶推進装置は、電動モータによってプロペラの回転速度を調整することにより、レバー位置とプロペラの回転速度との関係を一定に維持できる。さらに、電動モータによってプロペラを低速で回転させることができるので、ドッグクラッチの断続を繰り返さなくてもよい。しかも、前後進切替機構が中立状態のときに、プロペラを回転させるトルクがエンジン出力伝達軸に入力されたとしても、エンジン出力伝達軸からプロペラに加わるトルクとは反対方向のトルクを電動モータからプロペラに加えることができる。したがって、第1〜第8実施形態に係る船舶推進装置は、プロペラの回転を完全に停止させることができる。
【0166】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
以下に、特許請求の範囲に記載された構成要素と前述の実施形態における構成要素との対応関係を示す。
プロペラ軸線:プロペラ軸線A2
羽根:羽根30
リム:リム31、430
プロペラ:プロペラ5、305、405
ダクト:ダクト26
内燃機関:エンジン6
電動モータ:電動モータ7、407、507
船舶推進装置:船舶推進装置1、201、301、401、501、601、701、801
プロペラ回転軸:回転軸29
ステータ:ステータ41
ロータ:ロータ42
マグネット:マグネット47
シフト操作子:シフトレバー28b、リモコンユニット28c
前後進切替機構:前後進切替機構19
エンジン速度検出装置:エンジン速度検出装置50
プロペラ速度検出装置:プロペラ速度検出装置43
制御装置:制御装置X1
ドライブシャフト:ドライブシャフト18
出力軸:ドッグクラッチ24
エンジン出力伝達軸:エンジン出力伝達軸20
駆動ギヤ:駆動ギヤ358
従動ギヤ:従動ギヤ359
歯車伝達機構:歯車伝達機構357
前側リム:前側リム460
後側リム:後側リム461
前側電動モータ:前側電動モータ577
後側電動モータ:後側電動モータ578
回転量規制部:外周側規制部467、中心側規制部474
被支持部:前側被支持部468
支持部:前側支持部469
長孔:前側挿入孔468a
前側回転軸:前側回転軸462
後側回転軸:後側回転軸463
前側噛み合い部:前側噛み合い部475
後側噛み合い部:後側噛み合い部476
発光体:発光体789。
【0167】
発電用コイル:発電用コイル792、894
発電用マグネット:発電用マグネット793、895
【符号の説明】
【0168】
1 :船舶推進装置
5 :プロペラ
6 :エンジン
7 :電動モータ
18 :ドライブシャフト
19 :前後進切替機構
20 :エンジン出力伝達軸
24 :ドッグクラッチ
26 :ダクト
28b :シフトレバー
28c :リモコンユニット
29 :回転軸
30 :羽根
31 :リム
41 :ステータ
42 :ロータ
43 :プロペラ速度検出装置
47 :マグネット
50 :エンジン速度検出装置
201 :船舶推進装置
301 :船舶推進装置
305 :プロペラ
357 :歯車伝達機構
358 :駆動ギヤ
359 :従動ギヤ
401 :船舶推進装置
405 :プロペラ
407 :電動モータ
430 :リム
460 :前側リム
461 :後側リム
462 :前側回転軸
463 :後側回転軸
467 :外周側規制部
468 :前側被支持部
468a :前側挿入孔
469 :前側支持部
474 :中心側規制部
475 :前側噛み合い部
476 :後側噛み合い部
501 :船舶推進装置
507 :電動モータ
577 :前側電動モータ
578 :後側電動モータ
601 :船舶推進装置
701 :船舶推進装置
789 :発光体
792 :発電用コイル
793 :発電用マグネット
801 :船舶推進装置
894 :発電用コイル
895 :発電用マグネット
A1 :プロペラ軸線
X1 :制御装置
【技術分野】
【0001】
この発明は、船舶推進装置に関する。
【背景技術】
【0002】
エンジン(内燃機関)と電動モータとを備えるハイブリッド式の船舶推進装置が提案されている。
たとえば特許文献1には、エンジンと電動モータとが内蔵された船外機を備える船舶推進装置が開示されている。エンジンは、ドライブシャフト、前後進切替機構、およびプロペラシャフトを介して、プロペラに連結されている。電動モータは、エンジンと前後進切替機構との間でドライブシャフトに介装されている。エンジンは、ドライブシャフトに介装された多板クラッチを介して電動モータに連結されている。エンジンによってプロペラが駆動されるときには、多板クラッチが接続され、電動モータによってプロペラが駆動されるときには、多板クラッチが切断される。これにより、電動モータの動力がエンジンに伝達されることが防止される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−137646号公報
【発明の概要】
【課題を解決するための手段】
【0004】
しかしながら、特許文献1に記載の船舶推進装置では、電動モータが、前後進切替機構とエンジンとの間でドライブシャフトに介装されているので、エンジンと電動モータとの間に多板クラッチを設ける必要がある。そのため、船舶推進装置の構造が複雑化してしまう。
そこで、この発明の目的は、構造を簡素化できるハイブリッド式の船舶推進装置を提供することである。
【0005】
前記目的を達成するための本発明の一実施形態は、複数の羽根と、プロペラ軸線まわりに前記複数の羽根を取り囲む筒状のリムとを含み、前記プロペラ軸線まわりに回転可能なプロペラと、前記プロペラ軸線まわりに前記プロペラを取り囲むダクトと、前記ダクトに対して前記プロペラを回転させる内燃機関と、前記リムを回転させることにより、前記ダクトに対して前記プロペラを回転させる電動モータとを含む、船舶推進装置を提供する。
【0006】
この構成によれば、羽根およびリムを含むプロペラが、ダクトによって取り囲まれている。内燃機関は、ダクトに対してプロペラをプロペラ軸線まわりに回転させる。一方、電動モータは、リムを回転させることにより、ダクトに対してプロペラをプロペラ軸線まわりに回転させる。プロペラは、内燃機関および電動モータのいずれか一方、または内燃機関および電動モータの両方によってプロペラ軸線まわりに回転駆動される。これにより、船舶を推進させる推力が発生する。このように、内燃機関および電動モータが、互いに独立してプロペラを回転させることができるので、船舶推進装置の構造を簡素化できる。
【0007】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記複数の羽根と共に前記プロペラ軸線まわりに回転するプロペラ回転軸をさらに含んでいてもよい。この場合、前記内燃機関は、前記プロペラ回転軸を回転させることにより、前記ダクトに対して前記プロペラを回転させてもよい。
また、前記電動モータは、前記リムを直接駆動するダイレクトドライブモータ(direct drive motor)であってもよい。すなわち、前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含んでいてもよい。この場合、前記リムは、前記ロータの少なくとも一部を構成するマグネットを含んでいてもよい。すなわち、前記電動モータは、永久磁石型ロータ(permanent-magnet rotor)を含む永久磁石型直流モータであってもよい。また、前記電動モータは、突極型ロータ(salient poled rotor)を含むリラクタンスモータ(reluctance motor)であってもよい。
【0008】
また、前記船舶推進装置は、前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、前記内燃機関の回転速度を検出するエンジン速度検出装置と、前記プロペラの回転速度を検出するプロペラ速度検出装置と、前記前後進切替機構を制御する制御装置とをさらに含んでいてもよい。プロペラ速度検出装置は、プロペラ自体の回転速度を検出してもよいし、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)の回転速度を検出してもよい。すなわち、プロペラ速度検出装置は、前後進切替機構より下流側のいずれかの位置で回転速度を検出するように構成されていてもよい。
【0009】
この場合、前記制御装置は、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行ってもよい。すなわち、前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させてもよい。そして、前記制御装置は、前記速度差を前記所定の範囲内まで変化させた後、前記シフトイン動作を行ってもよい。前記シフトイン操作が行われたときに前記速度差が前記所定の範囲内であれば、前記制御装置は、前記内燃機関および電動モータの出力を変化させることなく、前記シフトイン動作を行ってもよい。この場合、前後進切替機構の入力軸(たとえば、後述する前側ギヤおよび後側ギヤ)と前後進切替機構の出力軸(たとえば、後述するドッグクラッチ)との相対速度が小さい状態で、入力軸と出力軸とが結合される。そのため、シフトイン動作に伴って発生する衝撃(シフトショック)を低減できる。
【0010】
また、前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。そして、前記制御装置は、前記前後進切替機構を中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上に達するまで前記プロペラを加速させてもよい。そして、前記制御装置は、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えてもよい。反転前方向および反転後方向は、いずれもプロペラ軸線まわりの互いに反対の方向である。
【0011】
内燃機関は、前後進切替機構を介してプロペラに接続されている。前後進切替機構が中立状態に切り替わると、内燃機関とプロペラとの接続が解除されるので、プロペラから内燃機関に加わる負荷がなくなる。そのため、プロペラの回転速度が高い状態で前後進切替機構が中立状態に切り替わると、内燃機関の回転速度が大幅に上昇する場合がある。したがって、反転前方向へのプロペラの回転速度が低下した状態で、前後進切替機構を中立状態に切り替えることにより、内燃機関の回転速度が大幅に上昇することを防止できる。さらに、プロペラの回転速度が接続速度以上の状態で前後進切替機構を中立状態から前進状態または後進状態に切り替えることにより、シフトショックを低減できる。
【0012】
また、前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。シフトアウト前方向は、シフトアウト操作が行われる前のプロペラの回転方向である。たとえば前後進切替機構を前進状態から中立状態に切り替えるシフトアウト操作がシフト操作子に行われた場合、シフトアウト前方向は、プロペラが前進方向の推力を発生する方向である。
【0013】
前記内燃機関は、船内に配置されていてもよいし、船外に配置されてもよい。前記内燃機関が船外に配置されている場合、前記船舶推進装置は、前記内燃機関が内蔵された船外機を含んでいてもよい。具体的には、前記船舶推進装置は、ドライブシャフトと、前後進切替機構と、エンジン出力伝達軸とをさらに含んでいてもよい。前記ドライブシャフトは、略鉛直方向に延びており、前記内燃機関によって回転駆動される。前記前後進切替機構は、前後方向に延びる出力軸を含み、前記ドライブシャフトの回転を前記出力軸に伝達する。前記エンジン出力伝達軸は、前記出力軸の回転を前記プロペラに伝達する。前記前後進切替機構は、前記ドライブシャフトの回転方向に対する前記出力軸の回転方向を変更可能である。したがって、前記前後進切替機構は、前記エンジン出力伝達軸およびプロペラの回転方向を変更可能である。
【0014】
また、前記船舶推進装置が、前記ドライブシャフトと、前記前後進切替機構と、前記エンジン出力伝達軸とを含む場合、前記プロペラは、前記前後進切替機構の前方または後方に配置されていてもよいし、前記出力軸より下方に配置されていてもよい。前記プロペラが前記前後進切替機構の前方または後方に配置されている場合、前記出力軸と前記エンジン出力伝達軸とは、同軸であってもよい。また、前記プロペラが前記出力軸より下方に配置されている場合、前記船舶推進装置は、前記内燃機関の動力を前記リムに伝達する歯車伝達機構をさらに含んでいてもよい。この場合、前記歯車伝達機構は、前記エンジン出力伝達軸と共に回転する駆動ギヤと、前記駆動ギヤの回転が伝達され、前記リムと共に回転する従動ギヤとを含んでいてもよい。
【0015】
また、前記船舶推進装置は、前記プロペラのピッチ(プロペラが一回転して進む距離)を変更できるように構成されていてもよい。
具体的には、前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含んでいてもよい。この場合、前記前側リムおよび後側リムのいずれか一方が、前記内燃機関によって回転駆動され、他方が、前記電動モータによって回転駆動されてもよい。この場合、前記内燃機関および電動モータが前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチが変更される。したがって、内燃機関および電動モータは、高トルク型と高出力型との間でプロペラの特性を変化させることができる。
【0016】
また、前記リムが前記前側リムおよび後側リムを含んでおり、前記電動モータが、前記前側リムを回転させる前側電動モータと、前記後側リムを回転させる後側電動モータとを含んでいてもよい。この場合、前記船舶推進装置は、前記前側電動モータおよび後側電動モータを制御することにより、前記前側リムおよび後側リムの相対回転量を制御する制御装置をさらに含んでいてもよい。この構成によれば、前記前側電動モータおよび後側電動モータが前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチが変更される。したがって、前記制御装置は、前記前側電動モータおよび後側電動モータを制御することにより、プロペラの特性を高トルク型と高出力型との間で無段階で調整できる。
【0017】
また、前記船舶推進装置が、前記プロペラのピッチを変更できるように構成されている場合、前記船舶推進装置は、前記前側リムおよび後側リムの相対回転量を規制する回転量規制部をさらに含んでいてもよい。この構成によれば、前側リムおよび後側リムの相対回転量が規制されるので、プロペラのピッチの変化量も規制される。したがって、船舶推進装置は、回転量規制部によって許容される前側リムおよび後側リムの相対回転量の範囲内で、プロペラのピッチを変更できる。
【0018】
前記回転量規制部は、前記リムおよび羽根のいずれか一方に設けられた支持部と、前記リムおよび羽根の他方に設けられており、前記支持部が挿入された長孔を区画する被支持部とを含んでいてもよい。
この構成によれば、リムおよび羽根が、支持部および被支持部によって連結されている。支持部は、被支持部によって区画された長孔に挿入されている。支持部および被支持部は、被支持部が支持部に支持された状態で長孔の長手方向に相対移動できる。リムおよび羽根は、支持部および被支持部の相対移動に伴って相対移動する。そして、支持部および被支持部(長孔の内面)が接すると、支持部および被支持部の相対移動が規制される。そのため、リムおよび羽根の相対移動が規制される。すなわち、羽根に対する前側リムの移動が規制される共に、羽根に対する後側リムの移動が規制される。言い換えると、前側リムおよび後側リムは、共通の部材(羽根)に対する相対移動が規制されることにより、相対回転が規制される。これにより、前側リムおよび後側リムの相対回転量が規制される。
【0019】
また、前記船舶推進装置が前記回転量規制部を含む場合、前記プロペラは、前記プロペラ軸線に沿って延びており、前記前側リムと共に前記プロペラ軸線まわりに回転する前側回転軸と、前記プロペラ軸線に沿って延びており、前記後側リムと共に前記プロペラ軸線まわりに回転する後側回転軸とをさらに含んでいてもよい。この場合、前記回転量規制部は、前記前側回転軸および後側回転軸にそれぞれ設けられており、所定の角度範囲内で前記プロペラ軸線まわりに相対回転可能に噛み合う前側噛み合い部および後側噛み合い部を含んでいてもよい。
【0020】
この構成によれば、前側噛み合い部が、プロペラの前側回転軸に設けられており、後側噛み合い部が、プロペラの後側回転軸に設けられている。したがって、前側噛み合い部は、前側回転軸と共にプロペラ軸線まわりに回転し、後側噛み合い部は、後側回転軸と共にプロペラ軸線まわりに回転する。前側噛み合い部および後側噛み合い部は、所定の角度範囲内でプロペラ軸線まわりに相対回転可能に噛み合っている。したがって、前側噛み合い部および後側噛み合い部が接すると、前側リムおよび後側リムの相対回転が規制される。これにより、前側リムおよび後側リムの相対回転量が規制される。
【0021】
また、前記船舶推進装置は、光を発する発光体をさらに含んでいてもよい。輝度や点灯時間などの前記発光体の発光状態は、前記プロペラの回転状態に応じて変化してもよい。また、前記発光体は、前記ダクトおよびプロペラのいずれか一方に配置されていてもよいし、前記ダクトおよびプロペラの両方に配置されていてもよい。前記発光体は、電灯であってもよいし、LED(発光体ダイオード)であってもよい。この場合、前記発光体に供給される電力は、前記電動モータに電力を供給するモータ電力源からの電力であってもよいし、前記発光体に電力を供給する専用の電力供給装置からの電力であってもよい。
【0022】
前記船舶推進装置が前記電力供給装置を含む場合、前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含んでいてもよい。さらに、前記船舶推進装置は、少なくとも一部が前記ステータに対向する位置で前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルをさらに含んでいてもよい。すなわち、前記電力供給装置は、前記発電用コイルを含んでいてもよい。この場合、前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されていてもよい。
【0023】
この構成によれば、発電用コイルがリムに取り付けられており、発光体が、発電用コイルに接続されている。発電用コイルの少なくとも一部は、ステータに対向している。したがって、電動モータがプロペラ(リム)を回転させると、発電用コイルを通過する磁束が変化し、発電用コイルで電流(誘導電流)が発生する。これにより、発光体が光を発する。発電用コイルで発生する電流は、プロペラの回転速度に応じて変化する。さらに、プロペラの回転速度が同じであっても、高トルクでプロペラを回転させる場合には、ステータに供給される電力が低トルクの場合よりも大きいので、発電用コイルで発生する電流が増加する。したがって、発光体の発光状態は、回転速度およびトルクを含むプロペラの回転状態に応じて変化する。このように、プロペラと共に回転する部材(発電用コイル)が電力を発生するので、発光体がプロペラに配置されている場合でも、発光体に対して確実に電力を供給できる。つまり、固定部分(ダクト)から回転体(プロペラ)に延びる複雑な配線を設けなくてもよい。
【0024】
また、前記船舶推進装置が前記電力供給装置を含む場合、前記船舶推進装置は、前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルと、前記ダクトに取り付けられており、前記発電用コイルに対向する発電用マグネットとをさらに含んでいてもよい。すなわち、前記電力供給装置は、専用のコイルおよびマグネットを含んでいてもよい。この場合、前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されていてもよい。
【0025】
この構成によれば、発電用コイルがリムに取り付けられており、発電用マグネットがダクトに取り付けられている。さらに、発電用コイルおよび発電用マグネットが互いに対向している。したがって、内燃機関および電動モータの少なくとも一方がプロペラ(リム)を回転させると、発電用コイルで電流が発生し、プロペラの回転状態に応じた発光状態で発光体が発光する。
【0026】
また、本発明の他の実施形態は、内燃機関と、電動モータと、前記内燃機関および電動モータの少なくとも一方によってプロペラ軸線まわりに回転駆動されるプロペラと、前記内燃機関から前記プロペラへの動力の伝達経路上に配置されており、前記プロペラが前進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、前記プロペラが後進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構とを含み、前記電動モータは、前記内燃機関から前記プロペラへの動力の伝達経路上において前記前後進切替機構より前記プロペラ側に配置されている、船舶推進装置を提供する。
【0027】
この構成によれば、電動モータが、前後進切替機構よりプロペラ側に配置されている。すなわち、電動モータは、内燃機関の動力の伝達方向に関して、前後進切替機構よりも下流に配置されている。電動モータは、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)に連結されていてもよいし、プロペラに連結されていてもよい。電動モータの動力は、前後進切替機構より下流の部分(中間部材またはプロペラ)から入力される。したがって、電動モータは、前後進切替機構が前進状態、中立状態、および後進状態のいずれの状態であっても、プロペラを回転させることができる。
【0028】
前記船舶推進装置は、前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、前記内燃機関の回転速度を検出するエンジン速度検出装置と、前記プロペラの回転速度を検出するプロペラ速度検出装置と、前記前後進切替機構を制御する制御装置とをさらに含んでいてもよい。
この場合、前記制御装置は、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行ってもよい。すなわち、前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させてもよい。そして、前記制御装置は、前記速度差を前記所定の範囲内まで変化させた後、前記シフトイン動作を行ってもよい。前記シフトイン操作が行われたときに前記速度差が前記所定の範囲内であれば、前記制御装置は、前記内燃機関および電動モータの出力を変化させることなく、前記シフトイン動作を行ってもよい。
【0029】
また、前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。そして、前記制御装置は、前記前後進切替機構を中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上に達するまで前記プロペラを加速させてもよい。そして、前記制御装置は、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えてもよい。
【0030】
また、前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えてもよい。
【図面の簡単な説明】
【0031】
【図1A】この発明の一実施形態に係る船舶推進装置の側面図である。
【図1B】この発明の一実施形態に係る船舶推進装置の側面図である。
【図2】この発明の一実施形態に係る船舶推進装置の背面図である。
【図3】この発明の一実施形態に係る前後進切替機構の模式図である。
【図4】この発明の一実施形態に係る船舶推進装置の下部の部分断面図である。
【図5】この発明の一実施形態に係る船舶推進装置の下部の断面図である。
【図6】この発明の一実施形態に係る推進ユニットの背面図である。
【図7A】この発明の一実施形態に係る推進ユニットの外周部の断面図である。
【図7B】この発明の一実施形態に係る推進ユニットの外周部の断面図である。
【図8A】この発明の一実施形態に係る電動モータの一部の断面図である。
【図8B】この発明の一実施形態に係る電動モータの一部の断面図である。
【図9A】この発明の一実施形態に係る推進ユニットの断面図である。
【図9B】この発明の一実施形態に係る推進ユニットの断面図である。
【図10A】図6に示すX−X線に沿う羽根の断面図である。
【図10B】図6に示すX−X線に沿う羽根の断面図である。
【図11】この発明の一実施形態に係る船舶推進装置の電気的構成を示すブロック図である。
【図12】コントロールレバーの操作量と船舶推進装置の出力との関係を示すグラフである。
【図13A】船舶推進装置が自動選択モードに設定されている状態でコントロールレバーが前進位置または後進位置に配置されているときのフローチャートである。
【図13B】レバー位置変化割合およびバッテリーの残量と各モードの範囲との関係について説明するための図である。
【図13C】電動モードについて説明するためのフローチャートである。
【図13D】エンジンモードについて説明するためのフローチャートである。
【図14A】シフトイン操作が行われたときのフローチャートである。
【図14B】シフトアウト操作が行われたときのフローチャートである。
【図15A】反転操作が行われたときのフローチャートである。
【図15B】F→R反転動作およびR→F反転動作について説明するためのフローチャートである。
【図16A】この発明の第2実施形態に係る船舶推進装置の下部の部分断面図である。
【図16B】この発明の第2実施形態に係る推進ユニットの断面図である。
【図17A】この発明の第3実施形態に係る船舶推進装置の下部の部分断面図である。
【図17B】この発明の第3実施形態に係る推進ユニットの背面図である。
【図17C】この発明の第3実施形態に係る推進ユニットの断面図である。
【図18】この発明の第4実施形態に係る推進ユニットの断面図である。
【図19A】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図19B】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図20】この発明の第5実施形態に係る推進ユニットの断面図である。
【図21A】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図21B】プロペラ軸線に対する羽根の傾き角度について説明するための図である。
【図22A】この発明の第6実施形態に係る推進ユニットの外周部の断面図である。
【図22B】この発明の第6実施形態に係る推進ユニットの外周部の断面図である。
【図23】図22Bに示す推進ユニットの一部を拡大した斜視図である。
【図24】この発明の第7実施形態に係る推進ユニットの背面図である。
【図25A】この発明の第7実施形態に係る推進ユニットの一部の断面図である。
【図25B】この発明の第7実施形態に係る推進ユニットの一部の断面図である。
【図26】この発明の第8実施形態に係る推進ユニットの背面図である。
【図27A】この発明の第8実施形態に係る推進ユニットの一部の断面図である。
【図27B】この発明の第8実施形態に係る推進ユニットの一部の断面図である。
【発明を実施するための形態】
【0032】
以下では、この発明の実施形態を、添付図面を参照して詳細に説明する。
以下の実施形態に係るプロペラは、正転方向および逆転方向に回転可能である。正転方向は、プロペラを後方から見て右まわりであってもよいし、プロペラを後方から見て左まわりであってもよい。以下では、プロペラを後方から見て右まわりの方向をプロペラの正転方向と定義し、プロペラを後方から見て左まわりの方向をプロペラの逆転方向と定義する。
【0033】
[第1実施形態]
図1Aおよび図1Bは、この発明の一実施形態に係る船舶推進装置1の側面図である。図2は、この発明の一実施形態に係る船舶推進装置1の背面図である。図3は、この発明の一実施形態に係る前後進切替機構19の模式図である。
図1Aおよび図1Bに示すように、船舶推進装置1は、船舶V1の船尾に取り付け可能なブラケット2と、ブラケット2を介して船尾に取り付けられる船外機3と、船外機3に取り付けられた推進ユニット4とを含む。図2に示すように、船舶推進装置1は、推進ユニット4に保持されたプロペラ5をさらに含む。船舶推進装置1は、ハイブリッド式の船舶推進装置である。すなわち、図1Aおよび図1Bに示すように、船舶推進装置1は、前後方向に延びるプロペラ軸線A2まわりにプロペラ5を回転させるエンジン6および電動モータ7と、エンジン6を制御するエンジンECU8(Electronic Control Unit)と、電動モータ7を制御するモータECU9とをさらに含む。
【0034】
図1Aおよび図1Bに示すように、エンジン6は、船外機3に内蔵されており、電動モータ7は、推進ユニット4に内蔵されている。エンジン6は、上下方向に延びるクランク軸線まわりに回転可能なクランクシャフトを含む内燃機関である。エンジン6は、燃料供給ホース10を介して、船内に配置された燃料タンク11に接続されている。電動モータ7は、電気配線W1を介して、モータECU9に接続されている。エンジンECU8およびモータECU9は、船内に配置されたバッテリー12に接続されている。バッテリー12の電力は、モータECU9を介して電動モータ7に供給される。モータECU9は、LAN(local area network)ケーブルC1によってエンジンECU8に接続されている。エンジンECU8およびモータECU9は、LANケーブルC1を通じて互いに通信する。
【0035】
図1Aおよび図1Bに示すように、エンジンECU8は、船外機3に内蔵されており、モータECU9は、船内に配置されている。モータECU9は、船外機3または推進ユニット4内に配置されていてもよい。モータECU9が推進ユニット4内に配置される場合、モータECU9は、エンジン6を冷却する冷却水によって冷却されてもよい。この場合、冷却水路は、冷却水がエンジン6よりも先にモータECU9を冷却するように構成されていることが好ましい。この構成によれば、モータECU9は、エンジン6によって温められる前の低温の冷却水によって冷却される。そのため、モータECU9の温度を十分に低下させることができる。
【0036】
図1Aおよび図1Bに示すように、船外機3は、船体H1の後方に配置されている。船外機3は、前述のエンジン6およびエンジンECU8と、エンジン6およびエンジンECU8を覆うエンジンカバー13と、エンジンカバー13から下方に延びるアッパーケース14と、アッパーケース14から下方に延びるロワーケース15とを含む。さらに、船外機3は、上下方向に延びる略鉛直なステアリングシャフト16を含む。船外機3は、略鉛直なステアリング軸線A2(ステアリングシャフト16の中心軸線)まわりに回転可能にブラケット2に連結されている。したがって、船外機3は、船体H1に対してステアリング軸線A2まわりに左右に回動可能である。推進ユニット4は、ロワーケース15の後方に配置されている。推進ユニット4は、ステー17を介してロワーケース15に連結されている。推進ユニット4は、船外機3と共にステアリング軸線A2まわりに回転する。したがって、船外機3がステアリング軸線A2まわりに左右に回動すると、プロペラ5も、ステアリング軸線A2まわりに左右に回動する。
【0037】
図1Aおよび図1Bに示すように、船外機3は、さらに、エンジン6に連結されたドライブシャフト18と、ドライブシャフト18に連結された前後進切替機構19と、前後進切替機構19に連結されたエンジン出力伝達軸20とを含む。ドライブシャフト18は、略鉛直方向に延びている。ドライブシャフト18は、エンジン6によってドライブシャフト18の中心軸線まわりに回転駆動される。ドライブシャフト18は、前後進切替機構19によってエンジン出力伝達軸20に連結されている。エンジン出力伝達軸20は、前後方向に延びている。プロペラ5は、エンジン出力伝達軸20の後端部に連結されている。プロペラ5は、エンジン出力伝達軸20と共に回転する。エンジン6の回転は、ドライブシャフト18、前後進切替機構19、およびエンジン出力伝達軸20を介して、プロペラ5に伝達される。前後進切替機構19は、エンジン出力伝達軸20が正転方向に回転する前進状態と、エンジン出力伝達軸20が逆転方向に回転する後進状態と、ドライブシャフト18とエンジン出力伝達軸20との接続が解除される中立状態との間で切り替わる。したがって、プロペラ5の回転状態は、前後進切替機構19の状態に伴って切り替わる。
【0038】
図3に示すように、前後進切替機構19は、ドライブシャフト18に連結されたピニオン21と、ピニオン21に噛み合う前側ギヤ22および後側ギヤ23と、前側ギヤ22および後側ギヤ23のいずれか一方に選択的に噛み合わされるドッグクラッチ24とを含む。前後進切替機構19は、電動式の前後進切替機構である。すなわち、前後進切替機構19は、ドッグクラッチ24を移動させるシフトアクチュエータ25をさらに含む。シフトアクチュエータ25とドッグクラッチ24とは、図示しないシフトロッドを介して接続されている。エンジンECU8は、前後進切替機構19の出力軸に相当するドッグクラッチ24をシフトアクチュエータ25によって移動させることにより、前後進切替機構19を前進状態、後進状態、および中立状態のいずれかの状態に選択的に切り替える。
【0039】
図3に示すように、ピニオン21、前側ギヤ22、および後側ギヤ23は、いずれもベベルギヤである。前側ギヤ22および後側ギヤ23は、前後方向に間隔を空けて配置されている。ドッグクラッチ24は、前側ギヤ22および後側ギヤ23の間に配置されている。エンジン出力伝達軸20は、前側ギヤ22、後側ギヤ23、およびドッグクラッチ24を前後方向に貫通している。前側ギヤ22および後側ギヤ23は、エンジン出力伝達軸20に対してエンジン出力伝達軸20の中心軸線まわりに回転可能である。前側ギヤ22および後側ギヤ23は、ロワーケース15によって回転可能に保持されている。一方、ドッグクラッチ24は、スプラインによってエンジン出力伝達軸20に連結されている。したがって、エンジン出力伝達軸20およびドッグクラッチ24は、軸方向に相対移動可能であり、エンジン出力伝達軸20の中心軸線まわりに一体回転可能である。ドッグクラッチ24およびエンジン出力伝達軸20は、同軸的に配置されている。
【0040】
ドッグクラッチ24は、ドッグクラッチ24が前側ギヤ22に噛み合う前進位置と、ドッグクラッチ24が後側ギヤ23に噛み合う後進位置との間で、エンジン出力伝達軸20に対して移動可能である。前進位置と後進位置との間の位置(図3に示す位置)は、ドッグクラッチ24が前側ギヤ22および後側ギヤ23の両方から離れている中立位置である。エンジンECU8は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を前進位置、後進位置、および中立位置のいずれかのシフト位置に移動させる。前進位置、後進位置、および中立位置は、それぞれ、前進状態、後進状態、および中立状態に対応している。すなわち、シフトアクチュエータ25がドッグクラッチ24を前進位置に移動させると、前後進切替機構19は、前進状態に切り替わる。
【0041】
ドライブシャフト18は、エンジン6によって一定の回転方向に駆動される。ピニオン21は、ドライブシャフト18と共にドライブシャフト18の中心軸線まわりに回転する。前側ギヤ22および後側ギヤ23は、ピニオン21の回転に伴って互いに反対の方向に回転する。ドッグクラッチ24が前進位置に配置されており、前側ギヤ22が回転している状態では、前側ギヤ22の回転が、ドッグクラッチ24を介してエンジン出力伝達軸20に伝達される。これにより、エンジン出力伝達軸20が正転方向に回転する。また、ドッグクラッチ24が後進位置に配置されており、後側ギヤ23が回転している状態では、後側ギヤ23の回転が、ドッグクラッチ24を介してエンジン出力伝達軸20に伝達される。これにより、エンジン出力伝達軸20が逆転方向に回転する。また、ドッグクラッチ24が中立位置に配置されている状態では、ドライブシャフト18の回転がエンジン出力伝達軸20に伝達されず、ドライブシャフト18が空転する。
【0042】
一方、図1Aおよび図1Bに示すように、推進ユニット4は、前述のプロペラ5および電動モータ7と、プロペラ軸線A2まわりにプロペラ5を取り囲むダクト26とを含む。ダクト26は、前後方向に延びる円筒状である。ダクト26は、ステー17を介してロワーケース15に連結されている。プロペラ5および電動モータ7は、ダクト26によって保持されている。プロペラ5は、ダクト26内で正転方向および逆転方向に回転可能である。エンジンECU8およびモータECU9は、エンジン6および電動モータ7の少なくとも一方によって、正転方向および逆転方向にプロペラ5を回転させる。プロペラ5が正転方向に回転すると、前方からダクト26内に水が吸い込まれ、吸い込まれた水がダクト26から後方に排出される。これにより、前進方向の推力が発生する。これとは反対に、プロペラ5が逆転方向に回転すると、後方からダクト26内に水が吸い込まれ、吸い込まれた水がダクト26から前方に排出される。これにより、後進方向の推力が発生する。
【0043】
船舶推進装置1は、さらに、船舶V1を操舵する操舵装置27を含む。図1Aに示すように、操舵装置27は、操船者によって操作されるティラーハンドル27aを備えていてもよい。また、図1Bに示すように、操舵装置27は、操船者によって操作される操舵部材27bと、操舵部材27bの操作に応じて船外機3をステアリング軸線A2まわりに左右に回動させる操舵ユニット27cとを備えていてもよい。ティラーハンドル27aは、ステアリングシャフト16に連結されている。ステアリングシャフト16は、ティラーハンドル27aと共にステアリング軸線A2まわりに回動する。一方、図1Bに示すように、操舵ユニット27cは、ステアリングシャフト16と共にステアリング軸線A2まわりに回転するステアリングアーム27dに連結されている。操舵ユニット27cは、ステアリング軸線A2まわりにステアリングアーム27dを左右に回動させる。操舵部材27bは、プッシュ・プルケーブルによって操舵ユニット27cに機械的に連結されていてもよいし、操舵ユニット27cに電気的に連結されていてもよい。
【0044】
船舶推進装置1は、さらに、船舶推進装置1の出力調整、および推力の方向の切替を行う出力調整装置28を含む。図1Aに示すように、出力調整装置28は、ティラーハンドル27aに設けられたスロットルグリップ28aおよびシフトレバー28bを備えていてもよい。スロットルグリップ28aは、ティラーハンドル27aの中心軸線まわりに回転可能に構成されており、シフトレバー28bは、下端部を中心に前後に傾倒可能に構成されている。スロットルグリップ28aおよびシフトレバー28bは、操船者によって操作される。エンジンECU8およびモータECU9は、スロットルグリップ28aの位置に応じて船舶推進装置1の出力を調整する。また、エンジンECU8およびモータECU9は、シフトレバー28bの位置に応じて前後進切替機構19の状態を切り替える。たとえばシフトレバー28bが前後に傾けられると、エンジンECU8およびモータECU9は、前後進切替機構19を前進状態または後進状態に切り替える。
【0045】
また、図1Aおよび1Bに示すように、出力調整装置28は、スロットルグリップ28aおよびシフトレバー28bとして機能するリモコンユニット28cを備えていてもよい。リモコンユニット28cは、エンジンECU8およびモータECU9のいずれか一方に電気的に接続されていてもよいし、エンジンECU8およびモータECU9の両方に電気的に接続されていてもよい。リモコンユニット28cからの指令は、有線通信または無線通信によって操舵ユニット27cに送られる。
【0046】
図1Aおよび1Bに示すように、リモコンユニット28cは、前後に傾倒可能なコントロールレバー28dを備えていてもよいし、前後左右に傾倒可能なジョイスティック28eを備えていてもよい。また、リモコンユニット28cは、4つのボタンが設けられたワイヤレスリモコン28fを備えていてもよいし、インターネットなどのデータ通信網を介してエンジンECU8およびモータECU9の少なくとも一方と通信するタッチパネル28gを備えていてもよい。当然、出力調整装置28は、これらの装置以外の装置を備えていてもよい。すなわち、出力調整装置28の構成は、前述の構成に限定されない。
【0047】
以下では、出力調整装置28がリモコンユニット28cを備えており、リモコンユニット28cがコントロールレバー28dを備えている場合について説明する。図1Aに示すように、コントロールレバー28dは、最も前側に傾いた前進出力最大位置Fmaxと、最も後側に後進出力最大位置Rmaxとの間で前後に移動可能である。前進出力最大位置Fmaxは、前進方向の出力が最大の位置であり、後進出力最大位置Rmaxは、後進方向の出力が最大の位置である。前進出力最小位置Fminおよび後進出力最小位置Rminは、前進出力最大位置Fmaxと後進出力最大位置Rmaxとの間に設けられている。前進出力最小位置Fminは、前進方向の出力が最小の位置(零の位置)であり、後進出力最小位置Rminは、後進方向の出力が最小の位置(零の位置)である。
【0048】
図1Aに示すように、前進出力最小位置Fminは、後進出力最小位置Rminよりも前進出力最大位置Fmax側の位置である。前進出力最大位置Fmaxと前進出力最小位置Fminとの間の領域は、前後進切替機構19が前進状態に維持される前進位置(前進領域)であり、後進出力最大位置Rmaxと後進出力最小位置Rminとの間の領域は、前後進切替機構19が後進状態に維持される後進位置(後進領域)である。また、前進出力最小位置Fminおよび後進出力最小位置Rminの間の領域は、前後進切替機構19が中立状態に維持される中立位置である。
【0049】
コントロールレバー28dの現在位置は、リモコンユニット28cからエンジンECU8およびモータECU9に出力される。たとえば操船者がコントロールレバー28dを中立位置から前進位置に移動させると、エンジンECU8は、前後進切替機構19を中立状態から前進状態に切り替える。そして、エンジンECU8およびモータECU9は、前進出力最小位置Fminからのコントロールレバー28dの操作量に比例する大きさの出力を船舶推進装置1に発生させて、船舶V1を前進させる。
【0050】
図4は、船舶推進装置1の下部の部分断面図である。図5は、船舶推進装置1の下部の断面図である。図6は、推進ユニット4の背面図である。図7Aおよび図7Bは、推進ユニット4の外周部の断面図である。
図4に示すように、ダクト26は、前後方向に延びる姿勢でロワーケース15に連結されている。プロペラ5およびダクト26は、同軸的に配置されている。プロペラ5は、プロペラ軸線A2に沿って延びる筒状の回転軸29と、回転軸29の周囲に配置された複数の羽根30(blade)と、複数の羽根30を取り囲む円筒状のリム31とを含む。
【0051】
図5に示すように、回転軸29は、プロペラ軸線A2に沿って延びる円筒状の内軸部32と、プロペラ軸線A2まわりに内軸部32を取り囲む外軸部33と、内軸部32と外軸部33とを連結する複数の連結部34と含む。エンジン出力伝達軸20の後端部は、ロワーケース15から後方に突出している。エンジン出力伝達軸20の後端部は、内軸部32を貫通している。内軸部32は、ボルト35によってエンジン出力伝達軸20の後端部に連結されている。したがって、回転軸29は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。また、連結部34は、内軸部32と外軸部33との間に配置されている。複数の連結部34は、間隔を空けてプロペラ5の周方向に配列されている。内軸部32と外軸部33との間に形成された排気通路36は、ロワーケース15の内部に連通している。エンジン6で生成された排気は、前方から排気通路36に流入する。そして、排気通路36に流入した排気は、排気通路36から後方に排出される。これにより、エンジン6で生成された排気が水中に排出される。
【0052】
図6に示すように、複数の羽根30は、間隔を空けてプロペラ5の周方向に配列されている。羽根30は、リム31の内周面からプロペラ軸線A2に向かって延びる略三角形状である。羽根30は、平らなプレートであってもよいし、曲線部を含む湾曲したプレートであってもよい。羽根30の外端部(リム31側の端部)は、リム31に固定されており、羽根30の内端部(リム31とは反対側の端部)は、回転軸29に固定されている。したがって、回転軸29、羽根30、およびリム31は、プロペラ軸線A2まわりに一体回転可能である。そのため、エンジン出力伝達軸20がプロペラ軸線A2まわりに回転すると、回転軸29、羽根30、およびリム31は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。
【0053】
図5に示すように、リム31は、ダクト26の内側でプロペラ軸線A2を取り囲んでいる。リム31は、ダクト26の内周部に設けられた環状溝37に収容されている。環状溝37は、ダクト26の内周面より凹んでおり、全周に亘って連続している。リム31およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。リム31は、環状溝37内に収容された状態でダクト26に対してプロペラ軸線A2まわりに回転可能である。したがって、プロペラ5は、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0054】
リム31は、ダクト26に保持されていなくてもよいし、複数のベアリングを介してダクト26に保持されていてもよい。たとえば図7Aに示すように、リム31は、2つのスラストベアリングB1とラジアルベアリングB2とを介してダクト26に支持されていてもよい。また、図7Bに示すように、リム31は、複数のテーパローラベアリングB3を介してダクト26に支持されていてもよい。スラストベアリングB1およびラジアルベアリングB2は、ボールベアリングであってもよいし、ローラベアリングであってもよいし、その他の形式のベアリングであってもよい。
【0055】
図7Aに示すように、一方のスラストベアリングB1は、リム31の前端面とダクト26との間に配置されており、他方のスラストベアリングB1は、リム31の後端面とダクト26との間に配置されている。ラジアルベアリングB2は、リム31の外周面とダクト26との間に配置されている。2つのスラストベアリングB1は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、軸方向(プロペラ軸線A2に沿う方向)へのリム31の移動量を規制する。ラジアルベアリングB2は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、径方向へのリム31の移動量を規制する。したがって、軸方向および径方向へのプロペラ5の移動量は、スラストベアリングB1およびラジアルベアリングB2によって規制される。
【0056】
また、図7Bに示すように、複数のテーパローラベアリングB3は、複数の対を構成している。図6および図7Bを併せて参照すると分かるように、対のテーパローラベアリングB3は、前後方向から見たときに重なるように前後に間隔を空けて配置されている。前側のテーパローラベアリングB3は、リム31の前端面とダクト26との間に配置されており、後側のテーパローラベアリングB3は、リム31の後端面とダクト26との間に配置されている。複数の対のテーパローラベアリングB3は、間隔を空けて周方向に配列されている。
【0057】
図7Bに示すように、テーパローラベアリングB3は、ダクト26によって保持された支持軸38と、支持軸38を取り囲む内輪39と、内輪39の周囲に配置された複数のローラ40とを含む。複数のローラ40は、図示しない環状の保持器(retainer)によって保持されている。各ローラ40は、自身の中心軸線まわりに回転しながら(自転しながら)、内輪39まわりに回転可能である。各ローラ40は、リム31の前端面または後端面に接している。テーパローラベアリングB3は、プロペラ軸線A2まわりにリム31を回転可能に支持すると共に、軸方向および径方向へのリム31の移動量を規制する。したがって、軸方向および径方向へのプロペラ5の移動量は、テーパローラベアリングB3によって規制される。
【0058】
図8Aおよび図8Bは、電動モータ7の一部の断面図である。以下では、図5、図8A、および図8Bを参照する。
図5に示すように、推進ユニット4は、プロペラ5の回転速度を検出するプロペラ速度検出装置43を含む。プロペラ速度検出装置43は、ダクト26の内部に配置されている。電動モータ7の回転角(ロータ42の回転角)は、プロペラ速度検出装置43によって検出される。電動モータ7は、ダクト26の一部によって構成された環状のステータ41と、リム31の一部によって構成された円筒状のロータ42とを含む。すなわち、ダクト26は、ダクト26の外周面と環状溝37の底面との間に配置されたステータ41を含み、リム31は、リム31の外周部に設けられたロータ42を含む。ステータ41およびロータ42は、プロペラ軸線A2を取り囲んでいる。ステータ41およびロータ42は、間隔を空けてプロペラ5の径方向に対向している。図8Aおよび図8Bに示すように、ステータ41は、電磁鋼板などの軟磁性材料によって形成された環状のステータコア44と、ステータコア44に巻回された複数のコイル45とを含む。
【0059】
図8Aに示すように、ロータ42は、軟磁性材料によって形成された円筒状のロータコア46と、ロータコア46に保持された複数のマグネット47とを含む永久磁石型ロータ(permanent-magnet rotor)であってもよい。すなわち、電動モータ7は、永久磁石型直流モータであってもよい。また、図8Bに示すように、ロータ42は、間隔を空けてプロペラ5の周方向に配列された複数の突極48(salient pole)を含んでおり、軟磁性材料によって形成された円筒状の突極型ロータ(salient poled rotor)であってもよい。すなわち、電動モータ7は、スイッチドリラクタンスモータ(switched reluctance motor)であってもよい。電動モータ7は、これらのモータに限らず、ブラシ付きの直流モータであってもよいし、ブラシレスモータであってもよいし、その他の形式のモータであってもよい。
【0060】
図8Aに示すように、複数のコイル45は、プロペラ5の周方向に配列されている。複数のコイル45は、プロペラ軸線A2を取り囲む環状列を構成している。同様に、複数のマグネット47は、プロペラ5の周方向に配列されており、プロペラ軸線A2を取り囲む環状列を構成している。複数のコイル45は、プロペラ軸線A2を取り囲むと共に、プロペラ5の軸方向に並んだ複数の環状列を構成していてもよい。同様に、複数のマグネット47は、プロペラ軸線A2を取り囲むと共に、プロペラ5の軸方向に並んだ複数の環状列を構成していてもよい。たとえば、巻き数が半分に減らされた複数のコイル45によって、プロペラ5の軸方向に並んだ2つの環状列が構成されていてもよい。この構成によれば、電動モータ7の最大出力の変化を抑制しながら、径方向への電動モータ7の厚みを減少させることができる。
【0061】
電動モータ7は、ステータ41によってロータ42をプロペラ軸線A2まわりに回転させることにより、ダクト26に対してリム31をプロペラ軸線A2まわりに回転させる。これにより、複数の羽根30が、ダクト26に対してプロペラ軸線A2まわりに回転する。電動モータ7は、正転および逆転可能である。電動モータ7が正転方向にロータ42を回転させると、プロペラ5も正転方向に回転し、前進方向の推力が発生する。これとは反対に、電動モータ7がロータ42を逆転方向に回転させると、プロペラ5も逆転方向に回転し、後進方向の推力が発生する。モータECU9は、出力調整装置28(図1A参照)から入力された出力指令に基づいてステータ41への電力供給を制御する。すなわち、モータECU9は、プロペラ速度検出装置43からの出力に基づいてステータ41への電力供給を制御することにより、ロータ42の回転方向および回転速度を制御する。
【0062】
図9Aおよび図9Bは、推進ユニット4の断面図である。図10Aおよび図10Bは、図6に示すX−X線に沿う羽根30の断面図である。
図9Aに示すように、ダクト26の前端部の内径は、ダクト26の後端部の内径等しくてもよい。この場合、図10Aに示すように、羽根30の断面は、直線状であってもよい。この構成によれば、プロペラ5の回転速度が同じであれば、推進ユニット4は、前進方向への推力とほぼ同じ大きさの後進方向への推力を発生できる。
【0063】
一方、図9Bに示すように、ダクト26の前端部の内径IDfは、ダクト26の後端部の内径IDrとより大きくてもよい。この場合、図10Bに示すように、羽根30の断面は、前方に凸の円弧状であってもよい。この構成によれば、ダクト26の後端部の流路面積が、ダクト26の前端部の流路面積より小さいので、ダクト26を前から後に通過する水流がダクト26によって加速される。これにより、より大きな前進方向への推力が発生する。さらに、羽根30の断面が、円弧状であるので、推進効率が高まる。
【0064】
図11は、船舶推進装置1の電気的構成を示すブロック図である。
船舶推進装置1は、エンジンECU8およびモータECU9を含む制御装置X1を含む。エンジン6および電動モータ7は、制御装置X1に接続されている。同様に、シフトアクチュエータ25およびリモコンユニット28cは、制御装置X1に接続されている。エンジン6、電動モータ7、およびシフトアクチュエータ25は、リモコンユニット28cから制御装置X1に入力された指令に基づいて、制御装置X1によって制御される。
【0065】
図11に示すように、エンジン6は、クランクシャフトの回転に伴って発電する発電機49(たとえば、フライホイールマグネトウ(flywheel magneto))を含む。発電機49は、制御装置X1に接続されている。制御装置X1は、バッテリー12に接続されている。発電機49で発生した電力は、制御装置X1を介してバッテリー12に供給される。また、エンジン6は、エンジン6の回転速度(クランクシャフトの回転速度)を検出するエンジン速度検出装置50をさらに含む。エンジン速度検出装置50は、制御装置X1に接続されている。同様に、プロペラ5の回転速度を検出するプロペラ速度検出装置43は、制御装置X1に接続されている。
【0066】
船舶推進装置1は、さらに、燃料タンク11内の燃料の残量を検出する燃料残量検出装置51と、バッテリー12内の電力の残量を検出する電力残量検出装置52と、乗船者に警報する警報装置53とを含む。燃料残量検出装置51は、燃料タンク11内に配置されたフロートの位置に基づいて燃料の残量を検出するフロートセンサーであってもよいし、空気と燃料との混合気を形成するために噴射された燃料の噴射量から燃料の残量を推定する燃料残量推定部であってもよい。また、電力残量検出装置52は、バッテリー12の電圧、またはバッテリー12の入力電流および出力電流の積算値から電力の残量を推定する電力残量推定部であってもよい。電力残量推定部は、制御装置X1に設けられていてもよいし、制御装置X1とは異なる装置に設けられていてもよい。同様に、燃料残量推定部は、制御装置X1に設けられていてもよいし、制御装置X1とは異なる装置に設けられていてもよい。
【0067】
燃料残量検出装置51、電力残量検出装置52、および警報装置53は、制御装置X1に接続されている。燃料タンク11内の燃料の残量が下限値に達すると、制御装置X1は、警報装置53から警報を発する。同様に、バッテリー12内の電力の残量が下限値に達すると、制御装置X1は、警報装置53から警報を発する。警報装置53は、光を発する発光装置であってもよいし、警報音を発する音発生装置であってもよいし、メッセージを表示する表示装置であってもよいし、光、音、メッセージのうちの2つ以上を用いて乗船者に警報する装置であってもよい。
【0068】
船舶推進装置1は、さらに、操船者によって操作される運転モード選択スイッチ54を含む。運転モード選択スイッチ54は、制御装置X1に接続されている。船舶推進装置1の運転モードは、操船者が運転モード選択スイッチ54を操作することにより選択される。制御装置X1は、操船者によって選択された運転モードで船舶推進装置1を運転する。船舶推進装置1の運転モードは、エンジン6だけにプロペラ5を駆動させるエンジンモードと、電動モータ7だけにプロペラ5を駆動させる電動モードと、エンジン6および電動モータ7の両方にプロペラ5を駆動させるアシストモードとを含む。さらに、船舶推進装置1の運転モードは、制御装置X1がコントロールレバー28d(図1A参照)の位置に応じてエンジンモード、電動モード、およびアシストモードのうちのいずれか一つを選択する自動選択モードを含む。
【0069】
図12は、コントロールレバー28dの操作量と船舶推進装置1の出力との関係を示すグラフである。
自動選択モードでコントロールレバー28dが前進位置または後進位置に配置されている場合、図12において太線で示すように、制御装置X1は、エンジン6および電動モータ7のうちから選択された動力源にプロペラ5を駆動させることにより、出力最小位置(前進出力最小位置Fminまたは後進出力最小位置Rmin)からのコントロールレバー28dの操作量に比例する大きさの出力を発生させる。
【0070】
具体的には、図12に示すように、コントロールレバー28dの操作量が、第1操作量以下の場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、電動モータ7だけにプロペラ5を駆動させる。この場合、制御装置X1は、エンジン6の稼動を停止させてもよいし、前後進切替機構19を中立状態に切り替えることにより、エンジン6の出力がプロペラ5に伝達されることを防止してもよい。
【0071】
また、コントロールレバー28dの操作量が、第1操作量より大きく、第2操作量以下の場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、エンジン6および電動モータ7にプロペラ5を駆動させる。図12に示すように、制御装置X1は、この範囲において、コントロールレバー28dの操作量の増加に伴ってエンジン6の出力を増加させると共に、電動モータ7の出力を低下させることにより、コントロールレバー28dの操作量に比例する大きさの出力を発生させてもよい。
【0072】
また、コントロールレバー28dの操作量が、第2操作量より大きい場合、制御装置X1は、コントロールレバー28dの操作量に比例する大きさの出力が発生するように、エンジン6だけにプロペラ5を駆動させる。後述するように、操船者が船舶V1を急加速させる意図を有しておらず、かつバッテリー12の残量が上限値に達していなければ、制御装置X1は、電動モータ7で電力を発生させ、電動モータ7で発生した電力をバッテリー12に供給する。そのため、エンジン6からプロペラ5に伝達されたトルクとは反対方向のトルク(マイナスのトルク)が、電動モータ7からプロペラ5に加わり、出力が低下する。
【0073】
このように、自動選択モードでは、制御装置X1は、出力最小位置からのコントロールレバー28dの操作量に応じて、プロペラ5を駆動させる動力源を選択する。動力源を選択する基準となる第1操作量および第2操作量は、船舶推進装置1の状況に拘わらず一定の定数であってもよい。また、以下に説明するように、第1操作量および第2操作量は、コントロールレバー28dの操作状況やバッテリー12の残量などの船舶推進装置1の状況に応じて変化する変数であってもよい。
【0074】
図13Aは、船舶推進装置1が自動選択モードに設定されている状態でコントロールレバー28dが前進位置または後進位置に配置されているときのフローチャートである。図13Bは、レバー位置変化割合およびバッテリー12の残量と各モードの範囲との関係について説明するための図である。レバー位置変化割合は、単位時間当たりのコントロールレバー28dの位置の変化の割合である。
【0075】
コントロールレバー28dが前進位置または後進位置に配置されている場合、制御装置X1は、エンジン6および電動モータ7の両方が継続的に稼働できるか否かを判断する(S1)。具体的には、制御装置X1は、たとえば、燃料の残量が所定値以上であり、エンジン6の温度が所定値以下であるか否かを判断する。さらに、制御装置X1は、たとえば、バッテリー12の残量が所定値以上であるか否かを判断する。すなわち、制御装置X1は、燃料の残量が僅かでなく、エンジン6が高温になっていないことを確認する。さらに、制御装置X1は、バッテリー12に蓄えられている電力の残量が僅かでないことを確認する。
【0076】
エンジン6だけが継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S2)。同様に、電動モータ7だけが継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、エンジン6にプロペラ5を駆動させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S3)。また、エンジン6および電動モータ7の両方が継続的に稼働できない場合(S1でNoの場合)、制御装置X1は、警報装置53(図11参照)から警報を発する(S4)。
【0077】
一方、エンジン6および電動モータ7の両方が継続的に稼働できる場合(S1でYesの場合)、制御装置X1は、リモコンユニット28cの検出値に基づいて、所定時間前(たとえば、演算を行う直前)から現在までのコントロールレバー28dの位置の変化の割合を求める。たとえばコントロールレバー28dが前進位置に配置されている場合には、制御装置X1は、前進出力最小位置Fmin(図1A参照)から前進出力最大位置Fmax(図1A参照)までの範囲に対してコントロールレバー28dが何%の割合で移動したかを求める。そして、制御装置X1は、レバー位置変化割合が所定値以上であるか否かを判断する(S5)。すなわち、制御装置X1は、船舶V1を急加速させるために操船者が大きな移動量でコントロールレバー28dを素早く移動させたか否かを判断する。
【0078】
レバー位置変化割合が所定値以上でない場合(S5でNoの場合)、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S6)。すなわち、操船者がコントロールレバー28dを移動させていない場合や、操船者がコントロールレバー28dをゆっくりと移動させた場合には、制御装置X1は、十分な量の電力がバッテリー12に残っているか否かを判断する。また、S5でレバー位置変化割合が所定値以上である場合(S5でYesの場合)も同様に、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S7)。
【0079】
S6でバッテリー12の残量が所定値以上である場合(S6でYesの場合)、制御装置X1は、第1操作量(図12参照)としてa1を設定し、第2操作量(図12参照)としてb1を設定する(S8)。また、S6でバッテリー12の残量が所定値以上でない場合(S6でNoの場合)、制御装置X1は、第1操作量としてa2を設定し、第2操作量としてb2を設定する(S9)。図13Bに示すように、a2は、a1より小さい零以上の値であり、b2は、b1より小さい零以上の値である。したがって、レバー位置変化割合が小さく、バッテリー12の残量が十分でない場合には、制御装置X1は、電動モータ7がプロペラ5を回転させる範囲(電動モードおよびアシストモード)を通常よりも狭める。
【0080】
一方、S7でバッテリー12の残量が所定値以上である場合(S7でYesの場合)、制御装置X1は、第1操作量としてa3を設定し、第2操作量としてb3を設定する(S10)。また、S7でバッテリー12の残量が所定値以上でない場合(S7でNoの場合)、制御装置X1は、第1操作量としてa4を設定し、第2操作量としてb4を設定する(S11)。図13Bに示すように、a3は、b3より小さい零以上の値であり、b3は、b1より大きい零以上の値である。したがって、レバー位置変化割合が大きく、バッテリー12の残量が十分である場合には、制御装置X1は、アシストモードの上限値を通常よりも増加させる。また、図13Bに示すように、a4は、a3より小さい零以上の値であり、b4は、b3より小さい零以上の値である。したがって、レバー位置変化割合が大きくても、バッテリー12の残量が十分でない場合には、制御装置X1は、バッテリー12の残量が十分である場合よりも電動モータ7がプロペラ5を回転させる範囲を狭める。
【0081】
すなわち、バッテリー12の残量が少ない場合には、電力の消費量を減少させるために、電動モータ7の出力を低下させたり、電動モータ7がプロペラ5を回転させる範囲を狭めたりすることが好ましい。したがって、図13Bの一段目(S8)と二段目(S9)とに示すように、レバー位置変化割合が同じであれば、バッテリー12の残量が少ないときの「a」および「b」の値は、バッテリー12の残量が多いときの値より小さいことが好ましい。同様に、図13Bの三段目(S10)と四段目(S11)とに示すように、レバー位置変化割合が同じであれば、バッテリー12の残量が少ないときの「a」および「b」の値は、バッテリー12の残量が多いときの値よりも小さいことが好ましい。
【0082】
また、レバー位置変化割合が大きいときには、操船者が船舶V1を急加速させる意図を有しているので、エンジン6だけがプロペラ5を回転させる範囲(エンジンモード)および電動モータ7がアシストする範囲(アシストモード)を広げることが好ましい。したがって、図13Bの一段目(S8)と三段目(S10)とに示すように、バッテリー12の残量が同じであれば、レバー位置変化割合が大きいときの「b」の値は、レバー位置変化割合が小さいときの値よりも大きいことが好ましい。同様に、図13Bの二段目(S9)と四段目(S11)とに示すように、バッテリー12の残量が同じであれば、レバー位置変化割合が大きいときの「b」の値は、レバー位置変化割合が小さいときの値よりも大きいことが好ましい。「a」の値については、レバー位置変化割合に応じて変化させてもよいし、変化させなくてもよい。低速時のトルクは、エンジン6より電動モータ7の方が大きい。したがって、レバー位置変化割合が大きいときの「a」の値は、レバー位置変化割合が小さいときの「a」の値と等しくてもよい。
【0083】
このように、制御装置X1は、レバー位置変化割合とバッテリー12の残量とに応じて、第1操作量および第2操作量を設定する。そして、図13Aに示すように、制御装置X1は、設定した第1操作量および第2操作量とコントロールレバー28dの現在位置とに基づいて、船舶推進装置1をいずれのモードで運転するかを選択する(S12)。電動モードが選択された場合、制御装置X1は、以下に説明する電動モードで船舶推進装置1を運転する(S13)。また、アシストモードが選択された場合、制御装置X1は、アシストモードで船舶推進装置1を運転する(S14)。すなわち、制御装置X1は、エンジン6および電動モータ7によってプロペラ5を回転させながら、コントロールレバー28dの位置に対応する大きさの出力を発生させる。また、エンジンモードが選択された場合、制御装置X1は、以下に説明するエンジンモードで船舶推進装置1を運転する(S15)。
【0084】
図13Cは、電動モードについて説明するためのフローチャートである。
電動モードでは、制御装置X1は、バッテリー12の残量が所定値以上であるか否かを判断する(S21)。すなわち、制御装置X1は、バッテリー12からの電力だけで電動モータ7を長時間駆動できるか否かを判断する。
バッテリー12の残量が所定値以上である場合(S21でYesの場合)、制御装置X1は、電動モータ7を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S22)。
【0085】
一方、バッテリー12の残量が所定値以上でない場合(S21でNoの場合)、制御装置X1は、ドッグクラッチ24(図3参照)を中立位置に位置させて、エンジン6をアイドル回転速度以上の回転速度で回転させる。そして、制御装置X1は、エンジン6の発電機49(図11参照)で発生した電力をバッテリー12に供給し、バッテリー12を充電する(S23)。続いて、制御装置X1は、バッテリー12を充電しながら、コントロールレバー28dの位置に対応する大きさの出力が発生するように、電動モータ7によってプロペラ5を駆動させる(S22)。
【0086】
図13Dは、エンジンモードについて説明するためのフローチャートである。
エンジンモードでは、制御装置X1は、レバー位置変化割合が所定値以上であるか否かを判断する(S31)。レバー位置変化割合が所定値以上である場合(S31でYesの場合)、制御装置X1は、船舶V1を加速させる方向にコントロールレバー28dが操作されたか否かを判断する(S32)。船舶V1を加速させる方向にコントロールレバー28dが操作された場合(S32でYesの場合)、制御装置X1は、たとえば電気回路を一時的に切断することにより、電動モータ7での発電を禁止させる(S33)。すなわち、制御装置X1は、電動モータ7がエンジン6の負荷として働くことを防止する。そして、制御装置X1は、エンジン6の出力を増加させることにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S34)。
【0087】
一方、レバー位置変化割合が所定値以上でない場合(S31でNoの場合)には、制御装置X1は、バッテリー12の残量が上限値に達しているか否かを判断する(S35)。同様に、レバー位置変化割合が所定値以上であっても、船舶V1を加速させる方向にコントロールレバー28dが操作されていな場合(S32でNoの場合)には、制御装置X1は、バッテリー12の残量が上限値に達しているか否かを判断する(S35)。そして、バッテリー12の残量が上限値に達していない場合(S35でNoの場合)には、制御装置X1は、エンジン6を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S36)。それと共に、制御装置X1は、電動モータ7で発生した電力をバッテリー12に供給する(S37)。一方、バッテリー12の残量が上限値に達している場合(S35でYesの場合)、制御装置X1は、バッテリー12の過充電を防止するために、電動モータ7での発電を禁止させる(S38)。そして、制御装置X1は、発電が禁止された状態で、エンジン6を制御することにより、コントロールレバー28dの位置に対応する大きさの出力を発生させる(S39)。
【0088】
図14Aは、操船者がコントロールレバー28dを中立位置から前進位置または後進位置に移動させるシフトイン操作が行われたときのフローチャートである。
制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が中立位置であるか否かを判断する(S41)。シフト位置が中立位置である場合(S41でYesの場合)には、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が前進位置であるか否かを判断する(S42)。レバー位置が前進位置である場合(S42でYesの場合)、制御装置X1は、エンジン6の回転速度(絶対値)とプロペラ5の回転速度(絶対値)との差である速度差が第1しきい値以上であるか否かを判断する(S43)。具体的には、制御装置X1は、前側ギヤ22および後側ギヤ23の回転速度とドッグクラッチ24の回転速度との差が、小さいか否かを判断する。
【0089】
速度差が第1しきい値以上でない場合(S43でNoの場合)、制御装置X1は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を中立位置から前進位置に移動させる(S44)。これにより、ドッグクラッチ24が前側ギヤ22に噛み合い、エンジン6の回転がプロペラ5に伝達される。一方、速度差が第1しきい値以上である場合(S43でYesの場合)、制御装置X1は、エンジン6および電動モータ7の少なくとも一方を制御することにより、速度差を減少させる(S45)。
【0090】
制御装置X1が速度差を減少させるとき、制御装置X1は、エンジン6を制御することにより、前側ギヤ22および後側ギヤ23の回転速度を上昇または低下させてもよい。また、制御装置X1は、電動モータ7を制御することにより、ドッグクラッチ24の回転速度を上昇または低下させてもよい。当然、制御装置X1は、エンジン6および電動モータ7の両方を制御することにより、速度差を減少させてもよい。また、エンジン6の回転速度が低下している途中であれば、制御装置X1は、エンジン6の回転速度が所定値以下に低下するまで、電動モータ7の回転速度を一定に維持してもよい。
【0091】
制御装置X1は、速度差を減少させた後、再び、速度差が第1しきい値以上であるか否かを判断する(2回目のS43)。そして、速度差が第1しきい値以上でない場合(2回目のS43でNoの場合)には、制御装置X1は、ドッグクラッチ24を前進位置に移動させる(S44)。また、速度差が第1しきい値以上である場合(2回目のS43でYesの場合)には、制御装置X1は、再び速度差を減少させる(2回目のS45)。そして、制御装置X1は、速度差を第1しきい値より小さい値まで低下させる。
【0092】
一方、S42においてレバー位置が前進位置でない場合(S42でNoの場合)、制御装置X1は、レバー位置が後進位置であるか否かを判断する(S46)。そして、レバー位置が後進位置である場合(S46でYesの場合)、制御装置X1は、速度差が、第2しきい値以上であるか否かを判断する(S47)。第2しきい値は、第1しきい値と等しい値であってもよいし、第1しきい値より大きいまたは小さい値であってもよい。すなわち、シフト位置を中立位置から前進位置に切り替えるときのしきい値と、シフト位置を中立位置から後進位置に切り替えるときのしきい値とは、等しくてもよいし、異なっていてもよい。
【0093】
速度差が第2しきい値以上でない場合(S47でNoの場合)、制御装置X1は、シフトアクチュエータ25を制御することにより、ドッグクラッチ24を中立位置から後進位置に移動させる(S48)。これにより、ドッグクラッチ24が後側ギヤ23に噛み合い、エンジン6の回転がプロペラ5に伝達される。一方、速度差が第2しきい値以上である場合(S47でYesの場合)、S45と同様に、制御装置X1は、速度差を減少させる(S49)。そして、制御装置X1は、速度差を減少させた後、再び、速度差が第2しきい値以下であるか否かを判断する(2回目のS47)。
【0094】
図14Bは、操船者がコントロールレバー28dを前進位置または後進位置から中立位置に移動させるシフトアウト操作が行われたときのフローチャートである。
制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が前進位置または後進位置であるか否かを判断する(S51)。シフト位置が前進位置または後進位置である場合(S51でYesの場合)、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が中立位置であるか否かを判断する(S52)。レバー位置が中立位置である場合(S52でYesの場合)、すなわち、操船者がコントロールレバー28dを前進位置または後進位置から中立位置に移動させた場合、制御装置X1は、プロペラ5の回転速度が、切断速度(シフトアウト切断速度)以下であるか否かを判断する(S53)。切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。
【0095】
プロペラ5の回転速度が切断速度以下である場合(S53でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。これにより、ドッグクラッチ24が前側ギヤ22または後側ギヤ23から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度が切断速度以下でない場合(S53でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5の回転速度を低下させる(S55)。
【0096】
制御装置X1がプロペラ5の回転速度を低下させるとき、プロペラ5の回転速度が低下している途中である場合には、制御装置X1は、プロペラ5の回転速度が切断速度以下に低下するまで、電動モータ7の出力を一定に維持してもよい。また、制御装置X1は、電動モータ7の出力を低下させることにより、プロペラ5の回転速度を低下させてもよい。すなわち、電動モータ7の出力が低下すると、電動モータ7からの抵抗が、プロペラ5に加わる。これにより、プロペラ5の回転速度が低下する。さらに、シフト位置が前進位置または後進位置の状態でプロペラ5の回転速度が低下するので、プロペラ5だけでなく、エンジン6の回転速度も低下する。
【0097】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、切断速度以下であるか否かを判断する(2回目のS53)。そして、プロペラ5の回転速度が切断速度以下である場合(2回目のS53でYesの場合)には、制御装置X1は、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。また、プロペラ5の回転速度が切断速度以下でない場合(2回目のS53でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS55)。このようにして、制御装置X1は、プロペラ5の回転速度を切断速度以下まで低下させた後、ドッグクラッチ24を前進位置または後進位置から中立位置に移動させる(S54)。
【0098】
図15Aは、操船者がコントロールレバー28dを前進位置および後進位置のいずれか一方から他方に移動させる反転操作が行われたときのフローチャートである。図15Bは、プロペラ5の回転方向を前進方向(正転方向)から後進方向(逆転方向)に反転させるF→R反転動作、およびプロペラ5の回転方向を後進方向から前進方向に反転させるR→F反転動作について説明するためのフローチャートである。
【0099】
図15Aに示すように、制御装置X1は、シフト位置(ドッグクラッチ24(図3参照)の位置)が前進位置であるか否かを判断する(S61)。シフト位置が前進位置である場合(S61でYesの場合)、制御装置X1は、レバー位置(コントロールレバー28d(図1A参照)の位置)が後進位置であるか否かを判断する(S62)。レバー位置が後進位置である場合(S62でYesの場合)、すなわち、操船者がコントロールレバー28dを前進位置から後進位置に移動させた場合、制御装置X1は、F→R反転動作を実行する(S63)。具体的には、図15Bに示すように、制御装置X1は、プロペラ5の回転速度が、F→R切断速度以下であるか否かを判断する(S64)。F→R切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。さらに、F→R切断速度は、前述のシフトアウト切断速度と等しい速度であってもよいし、シフトアウト切断速度より高速または低速であってもよい。
【0100】
プロペラ5の回転速度がF→R切断速度以下である場合(S64でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。これにより、ドッグクラッチ24が前側ギヤ22から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度がF→R切断速度以下でない場合(S64でNoの場合)、制御装置X1は、電動モータ7を制御することにより、S55(図14B参照)と同様に、プロペラ5の回転速度を低下させる(S66)。
【0101】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、F→R切断速度以下であるか否かを判断する(2回目のS64)。そして、プロペラ5の回転速度がF→R切断速度以下である場合(2回目のS64でYesの場合)には、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。また、プロペラ5の回転速度がF→R切断速度以下でない場合(2回目のS64でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS66)。このようにして、制御装置X1は、プロペラ5の回転速度をF→R切断速度以下まで低下させた後、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。
【0102】
ドッグクラッチ24が中立位置に移動した後は、制御装置X1は、船舶推進装置1の運転モードが、アシストモードまたはエンジンモード(自動選択モードのアシストモードおよびエンジンモードを含む)であるか否かを確認する(S67)。運転モードがアシストモードまたはエンジンモードでない場合(S67でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S68)。すなわち、制御装置X1は、エンジン6とプロペラ5との機械的な接続が解除されている状態で、電動モータ7にプロペラ5を駆動させることにより、プロペラ5の回転方向を正転方向から逆転方向に切り替える。そして、制御装置X1は、電動モータ7によって、出力指令に対応するプロペラ回転速度までプロペラ5を逆転方向に加速させる。
【0103】
運転モードがアシストモードまたはエンジンモードである場合(S67でYesの場合)も同様に、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S69)。そして、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、F→R接続速度までプロペラ5を逆転方向に加速させる。その後、制御装置X1は、エンジン6の回転速度(絶対値)とプロペラ5の回転速度(絶対値)との差である速度差が、第3しきい値以上であるか否かを判断する(S70)。
【0104】
速度差が第3しきい値以上でない場合(S70でNoの場合)、制御装置X1は、ドッグクラッチ24を中立位置から後進位置に移動させる(S71)。これにより、ドッグクラッチ24が後側ギヤ23に噛み合い、エンジン6の回転がプロペラ5に伝達される。そのため、プロペラ5は、エンジン6および電動モータ7の両方によって逆転方向に駆動される。一方、速度差が第3しきい値以上である場合(S70でYesの場合)、制御装置X1は、S45(図14A参照)と同様に、エンジン6および電動モータ7を制御することにより、速度差を低下させる(S72)。そして、制御装置X1は、再び、速度差が第3しきい値以上であるか否かを判断する(2回目のS70)。
【0105】
一方、図15Aに示すように、S61においてシフト位置が前進位置でない場合(S61でNoの場合)には、制御装置X1は、シフト位置が後進位置であるか否かを判断する(S73)。シフト位置が後進位置である場合(S73でYesの場合)には、制御装置X1は、レバー位置が前進位置であるか否かを判断する(S74)。レバー位置が前進位置である場合(S74でYesの場合)、すなわち、操船者がコントロールレバー28dを後進位置から前進位置に移動させた場合、制御装置X1は、R→F反転動作を実行する(S75)。具体的には、図15Bに示すように、制御装置X1は、プロペラ5の回転速度が、R→F切断速度以下であるか否かを判断する(S64)。R→F切断速度は、一定の速度(定数)であってもよいし、前述のレバー位置変化割合等に基づいて設定される任意の速度(変数)であってもよい。さらに、R→F切断速度は、前述のシフトアウト切断速度と等しい速度であってもよいし、シフトアウト切断速度より高速または低速であってもよい。当然、R→F切断速度は、F→R切断速度と等しい速度であってもよいし、F→R切断速度より高速または低速であってもよい。
【0106】
プロペラ5の回転速度がR→F切断速度以下である場合(S64でYesの場合)、制御装置X1は、ドッグクラッチ24を前進位置から中立位置に移動させる(S65)。これにより、ドッグクラッチ24が後側ギヤ23から離れ、ドライブシャフト18とエンジン出力伝達軸20との機械的な接続が解除される。一方、プロペラ5の回転速度がR→F切断速度以下でない場合(S64でNoの場合)、制御装置X1は、S55(図14B参照)と同様に、プロペラ5の回転速度を低下させる(S66)。これにより、エンジン6およびプロペラ5の回転速度が低下する。
【0107】
制御装置X1は、プロペラ5の回転速度を低下させた後、再び、プロペラ5の回転速度が、R→F切断速度以下であるか否かを判断する(2回目のS64)。そして、プロペラ5の回転速度がR→F切断速度以下である場合(2回目のS64でYesの場合)には、制御装置X1は、ドッグクラッチ24を後進位置から中立位置に移動させる(S65)。また、プロペラ5の回転速度がR→F切断速度以下でない場合(2回目のS64でNoの場合)には、制御装置X1は、再び、プロペラ5の回転速度を低下させる(2回目のS66)。このようにして、制御装置X1は、プロペラ5の回転速度をR→F切断速度以下まで低下させた後、ドッグクラッチ24を後進位置から中立位置に移動させる(S65)。
【0108】
ドッグクラッチ24が中立位置に移動した後は、制御装置X1は、船舶推進装置1の運転モードが、アシストモードまたはエンジンモードであるか否かを確認する(S67)。運転モードがアシストモードまたはエンジンモードでない場合(S67でNoの場合)、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S68)。すなわち、制御装置X1は、エンジン6とプロペラ5との機械的な接続が解除されている状態で、電動モータ7にプロペラ5を駆動させることにより、プロペラ5の回転方向を逆転方向から正転方向に切り替える。そして、制御装置X1は、電動モータ7によって、出力指令に対応するプロペラ回転速度までプロペラ5を正転方向に加速させる。
【0109】
運転モードがアシストモードまたはエンジンモードである場合(S67でYesの場合)も同様に、制御装置X1は、電動モータ7を制御することにより、プロペラ5を反転させる(S69)。そして、制御装置X1は、電動モータ7にプロペラ5を駆動させることにより、R→F接続速度までプロペラ5を正転方向に加速させる。その後、制御装置X1は、速度差が、第4しきい値以上であるか否かを判断する(S70)。
【0110】
速度差が第4しきい値以上でない場合(S70でNoの場合)、制御装置X1は、ドッグクラッチ24を中立位置から前進位置に移動させる(S71)。これにより、ドッグクラッチ24が前側ギヤ22に噛み合い、エンジン6の回転がプロペラ5に伝達される。そのため、プロペラ5は、エンジン6および電動モータ7の両方によって正転方向に駆動される。一方、速度差が第4しきい値以上である場合(S70でYesの場合)、制御装置X1は、S45(図14A参照)と同様に、エンジン6および電動モータ7を制御することにより、速度差を低下させる(S72)。そして、制御装置X1は、再び、速度差が第4しきい値以上であるか否かを判断する(2回目のS70)。
【0111】
以上のように本実施形態では、羽根30およびリム31を含むプロペラ5が、ダクト26によって取り囲まれている。エンジン6は、ダクト26に対して複数の羽根30をプロペラ軸線A2まわりに回転させる。同様に、電動モータ7は、ダクト26に対して複数の羽根30をプロペラ軸線A2まわりに回転させる。プロペラ5は、エンジン6および電動モータ7のいずれか一方、またはエンジン6および電動モータ7の両方によってプロペラ軸線A2まわりに回転駆動される。これにより、船舶V1を推進させる推力が発生する。このように、エンジン6および電動モータ7が、互いに独立してプロペラ5を回転させることができるので、船舶推進装置1の構造を簡素化できる。さらに、推進ユニット4がロワーケース15に取り付けられているので、船外機3の下部(ロワーユニット)以外の構成については既存の船外機と同じ部品を使用できる。さらに、船舶V1の航走状態では電動モータ7が水中に配置されるから、電動モータ7が発するモータ音が乗船者に伝わり難い。そのため、船舶推進装置1の静粛性を高めることができる。
【0112】
[第2実施形態]
次に、この発明の第2実施形態について説明する。
この第2実施形態と前述の第1実施形態との主要な相違点は、推進ユニットがロワーケースの前方に配置されていることである。
図16Aは、この発明の第2実施形態に係る船舶推進装置201の下部の部分断面図である。図16Bは、この発明の第2実施形態に係る推進ユニット4の断面図である。図16Aおよび図16Bにおいて、前述の図1〜15に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0113】
第2実施形態に係る船舶推進装置201は、船外機3の下部(ロワーユニット)を除き、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、船舶推進装置201は、第1実施形態に係るロワーケース15に代えて、ロワーケース215を含む。図16Aに示すように、ロワーケース215は、ロワーケース215の後部に設けられた排気部255を含む。排気部255は、エンジン6(図1A参照)で生成された排気を後方に排出する排気口を形成している。推進ユニット4は、ロワーケース215の前方に配置されている。したがって、プロペラ5は、前後進切替機構19の前方に配置されている。推進ユニット4は、ステー17を介してロワーケース215に連結されている。図16Bに示すように、エンジン出力伝達軸20の前端部は、ロワーケース215から前方に突出している。エンジン出力伝達軸20の前端部は、内軸部32を前後方向に貫通している。内軸部32は、ボルト35によってエンジン出力伝達軸20の前端部に連結されている。回転軸29の前端部は、前方に凸の半球状のカバー256によって覆われている。
【0114】
[第3実施形態]
次に、この発明の第3実施形態について説明する。
この第3実施形態と前述の第1実施形態との主要な相違点は、推進ユニットがロワーケースの下方に配置されていることである。
図17Aは、この発明の第3実施形態に係る船舶推進装置301の下部の部分断面図である。図17Bは、この発明の第3実施形態に係る推進ユニット4の背面図である。図17Cは、この発明の第3実施形態に係る推進ユニット4の断面図である。図17Aおよび図17Cにおいて、前述の図1〜16Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0115】
第3実施形態に係る船舶推進装置301は、船外機3の下部(ロワーユニット)を除き、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、船舶推進装置301は、第1実施形態に係るロワーケース15に代えて、ロワーケース315を含む。さらに、船舶推進装置301は、第1実施形態に係る推進ユニット4に代えて、推進ユニット304を含む。推進ユニット304は、プロペラを除き、第1実施形態に係る推進ユニット4と同様に構成を備えている。すなわち、推進ユニット304は、第1実施形態に係るプロペラ5に代えて、プロペラ305を含む。
【0116】
図17Aに示すように、ロワーケース315は、ロワーケース315の後部に設けられた排気部255を含む。推進ユニット304は、ロワーケース315の下方に配置されている。ダクト26の上端部は、ロワーケース315に結合されている。プロペラ305は、ドッグクラッチ24より下方に配置されている。図17Bに示すように、プロペラ305は、複数の羽根30と、リム31とを含む。すなわち、プロペラ305は、第1実施形態に係るプロペラ5とは異なり、回転軸29が設けられていない。リム31は、複数のベアリングB1〜B3(図7Aおよび図7B参照)を介してダクト26に保持されている。これにより、プロペラ305がダクト26に保持されている。
【0117】
図17Cに示すように、船舶推進装置301は、エンジン6の動力をリム31に伝達する歯車伝達機構357をさらに含む。歯車伝達機構357は、エンジン出力伝達軸20に連結された駆動ギヤ358と、リム31の外周に設けられた従動ギヤ359とを含む。駆動ギヤ358および従動ギヤ359は、互いに噛み合っていてもよいし、共通の中間ギヤに噛み合っていてもよい。図17Cでは、駆動ギヤ358が、従動ギヤ359に噛み合っている状態が示されている。駆動ギヤ358は、エンジン出力伝達軸20と共に回転し、従動ギヤ359は、リム31と共に回転する。エンジン出力伝達軸20の回転は、歯車伝達機構357によって減速された状態でリム31に伝達される。これにより、エンジン6の動力が増幅された状態でリム31に伝達され、プロペラ305が、ダクト26に対してプロペラ軸線A2まわりに回転する。
【0118】
[第4実施形態]
次に、この発明の第4実施形態について説明する。
この第4実施形態と前述の第2実施形態との主要な相違点は、プロペラのピッチ(プロペラが一回転して進む距離)が変更可能であることである。
図18は、この発明の第4実施形態に係る推進ユニット404の断面図である。図19Aおよび図19Bは、プロペラ軸線A2に対する羽根30の傾き角度について説明するための図である。図18〜図19Bにおいて、前述の図1〜図17Cに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0119】
第4実施形態に係る船舶推進装置401は、推進ユニットを除き、第2実施形態に係る船舶推進装置201と同様の構成を備えている。すなわち、図18に示すように、船舶推進装置401は、推進ユニット4に代えて、推進ユニット404を含む。推進ユニット404は、プロペラ軸線A2まわりに回転可能なプロペラ405と、プロペラ軸線A2まわりにプロペラ405を回転させる電動モータ407と、プロペラ軸線A2まわりにプロペラ405を取り囲むダクト26と含む。プロペラ405は、ダクト26によって保持されている。プロペラ405およびダクト26は、同軸的に配置されている。
【0120】
図18に示すように、プロペラ405は、プロペラ軸線A2に沿って延びる筒状の前側回転軸462および後側回転軸463と、前側回転軸462および後側回転軸463の周囲に配置された複数の羽根30と、複数の羽根30を取り囲む円筒状のリム430とを含む。図18〜図19Bでは、1つの羽根30だけを図示しており、他の羽根30の図示を省略している。各羽根30は、リム430によって支持されている。リム430は、複数の羽根30を取り囲む円筒状の前側リム460と、前側リム460の後方で複数の羽根30を取り囲む後側リム461とを含む。
【0121】
図18に示すように、前側回転軸462は、2つのスラストベアリングB401と2つのラジアルベアリングB402とを介して、プロペラ軸線A2に沿って延びる中心軸464に支持されている。中心軸464は、カバー256に固定されている。カバー256は、図示しない固定部材によってダクト26に固定されている。したがって、前側回転軸462は、ダクト26に対してプロペラ軸線A2まわりに回転可能である。前側回転軸462は、図示しない固定部材によって前側リム460に固定されている。したがって、前側リム460は、前側回転軸462によって支持されている。
【0122】
一方、図18に示すように、後側回転軸463は、前側回転軸462の後方に配置されている。前側回転軸462および後側回転軸463は、互いに等しい外径を有している。エンジン出力伝達軸20の前端部は、後側回転軸463内に挿入されている。後側回転軸463は、一体回転可能にエンジン出力伝達軸20に連結されている。後側回転軸463は、エンジン出力伝達軸20と共にプロペラ軸線A2まわりに回転する。後側回転軸463は、前側回転軸462に対してプロペラ軸線A2まわりに回転可能である。後述するように、後側回転軸463は、複数の羽根30を介して後側リム461に連結されている。後側回転軸463は、羽根30および後側リム461と共にプロペラ軸線A2まわりに回転可能である。
【0123】
図18に示すように、前側リム460および後側リム461は、ダクト26の内側でプロペラ軸線A2を取り囲んでいる。前側リム460は、ダクト26の内周部に設けられた前側環状溝465に収容されている。前側環状溝465は、ダクト26の内周面より凹んでおり、全周に亘って連続している。前側リム460およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。前側リム460は、前側環状溝465内に収容された状態で、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0124】
同様に、図18に示すように、後側リム461は、ダクト26の内周部に設けられた後側環状溝466に収容されている。後側環状溝466は、ダクト26の内周面より凹んでおり、全周に亘って連続している。後側リム461およびダクト26の中心軸線は、プロペラ軸線A2上に配置されている。後側リム461は、後側環状溝466内に収容された状態で、ダクト26に対してプロペラ軸線A2まわりに回転可能である。
【0125】
図18に示すように、電動モータ407は、ダクト26の一部によって構成された環状のステータ441と、前側リム460の一部によって構成された円筒状のロータ442とを含む。すなわち、ダクト26は、ダクト26の外周面と前側環状溝465の底面との間に配置されたステータ441を含み、前側リム460は、前側リム460の外周部に設けられたロータ442を含む。電動モータ407は、前側リム460をプロペラ軸線A2まわりに回転させる。後述するように、前側リム460は、羽根30の前端部に連結されており、羽根30の後端部は、後側リム461に連結されている。したがって、電動モータ407が前側リム460を回転させると、電動モータ407の動力が、羽根30および後側リム461に伝達される。これにより、プロペラ405全体がプロペラ軸線A2まわりに回転する。
【0126】
図19Aに示すように、推進ユニット404は、前側リム460および後側リム461の相対回転量を規制する外周側規制部467をさらに含む。外周側規制部467は、羽根30の前端部に設けられた前側被支持部468と、前側リム460に設けられた前側支持部469とを含む。さらに、外周側規制部467は、羽根30の後端部に設けられた後側被支持部470と、後側リム461に設けられた後側支持部471とを含む。さらに、外周側規制部467は、羽根30の内端部に設けられた内側被支持部472と、後側回転軸463に設けられた内側支持部473とを含む。
【0127】
図19Aに示すように、前側支持部469は、前側リム460の内周面に配置されており、後側支持部471は、後側リム461の内周面に配置されている。前側支持部469は、前側リム460の内周面から突出する棒状の突起であり、後側支持部471は、後側リム461の内周面から突出する棒状の突起である。前側支持部469は、前側被支持部468によって区画された前側挿入孔468a内に挿入されている。同様に、後側支持部471は、後側被支持部470によって区画された後側挿入孔470a内に挿入されている。また、図19Aおよび図19Bでは、後側回転軸463と内側支持部473とが離れている状態が示されているが、内側支持部473は、後側回転軸463に固定されており、後側回転軸463から外方に突出している。後側回転軸463は、後側回転軸463の外周面から突出する棒状の突起である。後側回転軸463は、内側被支持部472によって区画された内側挿入孔472a内に挿入されている。
【0128】
図19Aに示すように、前側挿入孔468aおよび内側挿入孔472aは、プロペラ軸線A2に対して傾いた方向(長手方向)に延びる長孔であり、後側挿入孔470aは、概ね円形である。前側被支持部468は、前側支持部469まわりに回転可能に前側支持部469に支持されている。同様に、後側被支持部470は、後側支持部471まわりに回転可能に後側支持部471に支持されており、内側被支持部472は、内側支持部473まわりに回転可能に内側支持部473に支持されている。さらに、前側挿入孔468aが長孔であるから、前側被支持部468は、前側支持部469に対して、前側挿入孔468aの長手方向に移動可能である。前側支持部469に対する前側被支持部468の移動量は、前側支持部469と前側被支持部468(前側挿入孔468aの内面)との接触によって規制される。同様に、内側挿入孔472aが長孔であるから、内側被支持部472は、内側支持部473に対して、内側挿入孔472aの長手方向に移動可能である。内側支持部473に対する内側被支持部472の移動量は、内側支持部473と内側被支持部472(内側挿入孔472aの内面)との接触によって規制される。前側リム460および後側リム461の相対回転は、前側支持部469と前側被支持部468との接触や、内側支持部473と内側被支持部472との接触によって規制される。
【0129】
また、図19Aに示すように、推進ユニット404は、前側回転軸462および後側回転軸463の相対回転量を規制することにより、前側リム460および後側リム461の相対回転量を規制する中心側規制部474をさらに含む。中心側規制部474によって許容される前側リム460および後側リム461の相対回転量は、外周側規制部467によって許容される前側リム460および後側リム461の相対回転量と等しくてもよいし、異なっていてもよい。すなわち、前側リム460および後側リム461の相対回転量は、中心側規制部474および外周側規制部467によって規制されてもよいし、中心側規制部474または外周側規制部467によって規制されてもよい。
【0130】
中心側規制部474は、前側回転軸462および後側回転軸463にそれぞれ設けられた前側噛み合い部475および後側噛み合い部476を含む。前側噛み合い部475は、前側回転軸462の後端部に設けられており、後側噛み合い部476は、後側回転軸463の前端部に設けられている。前側噛み合い部475は、後方に突出する複数の凸部を含み、後側噛み合い部476は、前方に突出する複数の凸部を含む。前側噛み合い部475および後側噛み合い部476は、互いに噛み合っている。前側噛み合い部475および後側噛み合い部476は、所定の角度範囲内でプロペラ軸線A2まわりに相対回転可能である。すなわち、前側回転軸462および後側回転軸463の相対回転量が所定値に達すると、前側噛み合い部475の凸部と後側噛み合い部476の凸部とが接触し、前側回転軸462および後側回転軸463の相対回転が規制される。
【0131】
図19Aおよび図19Bにおいて黒と白の矢印で示すように、前側リム460および後側リム461が、プロペラ軸線A2まわりに相対回転すると、前側被支持部468が、前側支持部469に対して前側挿入孔468aの長手方向に移動する。それと共に、後側被支持部470が、後側支持部471に対して後側支持部471まわりに回転する。そのため、プロペラ軸線A2に対する羽根30の傾き角度が変化する。羽根30の傾き角度の変化量は、前側リム460および後側リム461の相対回転量の増加に伴って増加する。そして、前側リム460および後側リム461の相対回転量が所定値に達すると、外周側規制部467および中心側規制部474の少なくとも一方によって、前側リム460および後側リム461の相対回転が規制される。これにより、前側リム460および後側リム461の相対回転量が規制される。
【0132】
エンジン6(図1A参照)の動力がエンジン出力伝達軸20に伝達されると、図19Aにおいて黒と白の矢印で示すように、前側リム460および後側リム461の位相が一致した状態で(同位相の状態で)、前側リム460および後側リム461が回転する。このとき、各羽根30は、前側支持部469が前側被支持部468に対して後側に偏った状態で、前側リム460および後側リム461と共にプロペラ軸線A2まわりに回転する。一方、電動モータ407が前側リム460を回転させると、図19Bにおいて黒と白の矢印で示すように、前側リム460の位相が後側リム461の位相より進んだ状態で(前側リム460が進角した状態で)、前側リム460および後側リム461が回転する。このとき、各羽根30は、前側支持部469が前側被支持部468に対して前側に偏った状態で、前側リム460および後側リム461と共にプロペラ軸線A2まわりに回転する。
【0133】
図19Aおよび図19Bを比較すると分かるように、前側リム460の位相と後側リム461の位相とが一致している状態と、前側リム460の位相が後側リム461の位相より進んだ状態とでは、プロペラ軸線A2に対する羽根30の傾き角度が異なっている。プロペラ405のピッチは、プロペラ軸線A2に対する羽根30の傾き角度に応じて変化する。したがって、制御装置X1は、エンジン6および電動モータ407を制御することにより、前側リム460および後側リム461が相対回転できる範囲内でプロペラ405のピッチを二段階で調整できる。そのため、制御装置X1は、プロペラ405の特性を高トルク型と高出力型との間で変化させることができる。
【0134】
[第5実施形態]
次に、この発明の第5実施形態について説明する。
この第5実施形態と前述の第4実施形態との主要な相違点は、プロペラのピッチが変更可能であり、前側リムを回転駆動する前側電動モータと、後側リムを回転駆動する後側電動モータとが設けられていることである。
【0135】
図20は、この発明の第5実施形態に係る推進ユニット504の断面図である。図21Aおよび図21Bは、プロペラ軸線A2に対する羽根30の傾き角度について説明するための図である。図20〜図21Bにおいて、前述の図1〜図19Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第5実施形態に係る船舶推進装置501は、推進ユニット404を除き、第4実施形態に係る船舶推進装置401と同様の構成を備えている。すなわち、図20に示すように、船舶推進装置501は、推進ユニット404に代えて、推進ユニット504を含む。推進ユニット504は、電動モータ407を除き、第4実施形態に係る推進ユニット404と同様の構成を備えている。すなわち、推進ユニット504は、電動モータ407に代えて、電動モータ507を含む。
【0136】
図20に示すように、電動モータ507は、プロペラ軸線A2まわりに前側リム460を回転させる前側電動モータ577と、プロペラ軸線A2まわりに後側リム461を回転させる後側電動モータ578とを含む。前側電動モータ577および後側電動モータ578は、モータECU9によって制御される。前側電動モータ577および後側電動モータ578は、同種のモータであってもよいし、異なる種類のモータであってもよい。たとえば、前側電動モータ577が、永久磁石型直流モータであり、後側電動モータ578が、スイッチドリラクタンスモータであってもよい。
【0137】
図20に示すように、前側電動モータ577は、ダクト26の一部によって構成された環状の前側ステータ579と、前側リム460の一部によって構成された円筒状の前側ロータ580とを含む。すなわち、ダクト26は、ダクト26の外周面と前側環状溝465の底面との間に配置された前側ステータ579を含み、前側リム460は、前側リム460の外周部に設けられた前側ロータ580を含む。前側ステータ579および前側ロータ580は、プロペラ軸線A2を取り囲んでいる。前側ステータ579および前側ロータ580は、間隔を空けてプロペラ405の径方向に対向している。
【0138】
同様に、後側電動モータ578は、ダクト26の一部によって構成された環状の後側ステータ581と、後側リム461の一部によって構成された円筒状の後側ロータ582とを含む。すなわち、ダクト26は、ダクト26の外周面と後側環状溝466の底面との間に配置された後側ステータ581を含み、後側リム461は、後側リム461の外周部に設けられた後側ロータ582を含む。後側ステータ581および後側ロータ582は、プロペラ軸線A2を取り囲んでいる。後側ステータ581および後側ロータ582は、間隔を空けてプロペラ405の径方向に対向している。
【0139】
図21Aにおいて黒と白の矢印で示すように、制御装置X1は、前側電動モータ577および後側電動モータ578を制御することにより、前側リム460および後側リム461の位相が一致した状態で、前側リム460および後側リム461を回転させる。また、図21Bにおいて黒と白の矢印で示すように、制御装置X1は、前側電動モータ577および後側電動モータ578を制御することにより、前側リム460の位相が後側リム461の位相より進んだ状態で、前側リム460および後側リム461を回転させる。制御装置X1は、前側リム460および後側リム461の位相を個別に制御できる。したがって、制御装置X1は、前側リム460および後側リム461が相対回転できる範囲内でプロペラ405のピッチを無段階で調整できる。
【0140】
[第6実施形態]
次に、この発明の第6実施形態について説明する。
この第6実施形態と前述の第1実施形態との主要な相違点は、ダクトの内周面とリムの外周面との間への異物の進入を防止する防塵構造が設けられていることである。
図22Aおよび図22Bは、この発明の第6実施形態に係る推進ユニット604の外周部の断面図である。図23は、図22Bに示す推進ユニット604の一部を拡大した斜視図である。図22A〜図23において、前述の図1〜図21Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0141】
第6実施形態に係る船舶推進装置601の推進ユニット604は、第1実施形態に係る推進ユニット4と同様の構成を備えている。すなわち、推進ユニット604は、第1実施形態に係る推進ユニット4の構成に加えて、ダクト26の内周面とリム31の外周面との間への異物の進入を防止する防塵構造683を備えている。防塵構造683は、図22Aに示すシール684を含む構成であってもよいし、図22Bに示す防塵リング686を含む構成であってもよい。
【0142】
具体的には、図22Aに示す防塵構造683は、前後方向に間隔を空けて配置された二対のシール684および固定リング685を含む。シール684は、全周に亘って連続した環状である。前側のシール684は、リム31の前端部に配置されており、後側のシール684は、リム31の後端部に配置されている。シール684は、全周に亘ってリム31に接している。シール684は、対の固定リング685を取り囲んでいる。シール684は、対の固定リング685に保持されている。シール684は、固定リング685によってリム31に押し付けられている。これにより、シール684がリム31に密着している。固定リング685は、シール684の内側からダクト26の内側に延びている。固定リング685は、ダクト26に固定されている。したがって、シール684は、対の固定リング685を介してダクト26に固定されている。リム31がダクト26に対してプロペラ軸線A2まわりに回転すると、リム31およびシール684は、シール684がリム31に密着した状態で、プロペラ軸線A2まわりに相対回転する。
【0143】
ダクト26の内周面とリム31の外周面との間の空間には、潤滑剤が充填されている。前側の対のシール684および固定リング685は、リム31の前端部とダクト26との間の軸方向への隙間を塞いでおり、後側の対のシール684および固定リング685は、リム31の後端部とダクト26との間の軸方向への隙間を塞いでいる。したがって、ダクト26の内周面とリム31の外周面との間の空間は、防塵構造683によって密閉されている。そのため、ダクト26とリム31との間から潤滑剤が漏れることが防止される。さらに、小石や水などの異物が、ダクト26とリム31との間に進入することが防止される。
【0144】
一方、図22Bに示す防塵構造683は、前後方向に間隔を空けて配置された2つの防塵リング686を含む。防塵リング686は、ダクト26に固定されている。前側の防塵リング686は、ダクト26の前端部の内側から後方に延びている。前側の防塵リング686の後端部とダクト26の前端部との間には、軸方向への隙間G1が設けられている。同様に、後側の防塵リング686は、ダクト26の後端部の内側から前方に延びている。後側の防塵リング686の前端部とダクト26の後端部との間には、軸方向への隙間G1が設けられている。
【0145】
前側の防塵リング686は、後端部から前方に延びる複数のスリット687を含む。同様に、後側の防塵リング686は、前端部から後方に延びる複数のスリット687を含む。複数のスリット687は、周方向に等間隔で配列されている。図23に示すように、スリット687は、周方向に対向する2つの傾斜面688の間に設けられている。スリット687は、ダクト26の内周面とリム31の外周面との間の空間に通じている。防塵リング686の最小隙間G2(スリット687の最小幅)は、防塵リング686とリム31との間の軸方向への最小隙間G1より狭い。さらに、防塵リング686とリム31との間の軸方向への最小隙間G1は、ダクト26とリム31との間の径方向への最小隙間G3より狭い。
【0146】
ダクト26内に進入した水は、一方の防塵リング686とリム31との間の隙間G1や、一方の防塵リング686の隙間G2を通過して、ダクト26の内周面とリム31の外周面との間の空間に流入する。そして、この水は、他方の防塵リング686とリム31との間の隙間G1や、他方の防塵リング686の隙間G2を通過して、ダクト26の内周面とリム31の外周面との間の空間から流出する。隙間G1および隙間G2より大きな異物は、防塵リング686およびリム31によって、ダクト26の内周面とリム31の外周面との間の空間への進入が防止される。さらに、隙間G1および隙間G2が、ダクト26とリム31との間の径方向への隙間G3より狭いので、隙間G3より大きな異物が、ダクト26とリム31との間に進入して、リム31の回転が阻害されることを防止できる。しかも、水が、ダクト26とリム31との間を流れるので、ダクト26とリム31との間に存在する微小な異物を水流によって排出できる。
【0147】
[第7実施形態]
次に、この発明の第7実施形態について説明する。
この第7実施形態と前述の第2実施形態との主要な相違点は、光を発する発光体が、プロペラに配置されていることである。
図24は、この発明の第7実施形態に係る推進ユニット204の背面図である。図25Aおよび図25Bは、この発明の第7実施形態に係る推進ユニット204の一部の断面図である。図24〜図25Bにおいて、前述の図1〜図23に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0148】
第7実施形態に係る船舶推進装置701は、第2実施形態に係る船舶推進装置201と同様の構成を備えている。すなわち、図25Aおよび図25Bに示すように、船舶推進装置701は、第2実施形態に係る船舶推進装置201の構成に加えて、光を発する複数の発光体789と、電力を発生する発電装置790と、発電装置790から発光体789に電力を供給する複数の基板791(フレキシブルプリント基板)とを含む。発光体789は、電灯であってもよいし、LED(発光体ダイオード)であってもよい。図24に示すように、各羽根30は、複数の発光体789を保持している。共通の羽根30に保持されている複数の発光体789は、径方向に延びる直線状の列を構成している。
【0149】
図25Aおよび図25Bに示すように、発光体789は、羽根30に埋め込まれており、その一部が、羽根30の背面から露出している。複数の基板791は、それぞれ、複数の羽根30に埋め込まれている。基板791は、共通の羽根30に保持されている複数の発光体789に電気的に接続されている。基板791には、発光体789に供給される電力を制御する電気回路が実装されている。基板791は、発電装置790に電気的に接続されている。基板791は、発電装置790から発光体789に電力を供給することにより、発光体789を発光させる。発電装置790は、図25Aに示す発電用コイル792を含む構成であってもよいし、図25Bに示す発電用コイル792および発電用マグネット793を含む構成であってもよい。
【0150】
具体的には、図25Aに示す発電装置790は、リム31に取り付けられた複数の発電用コイル792を含む。発電用コイル792は、ステータ41に対向する位置でリム31に取り付けられている。発電用コイル792は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、ステータ41および発電用コイル792が相対回転し、発電用コイル792を通過する磁束が変化する。そのため、発電用コイル792に電流(誘導電流)が発生する。したがって、電動モータ7がプロペラ5を回転させると、発光体789が発光する。
【0151】
基板791は、発電用コイル792で発生する電流値に応じて発光体789の発光状態を変化させる。発電用コイル792で発生する電流は、プロペラ5の回転速度に応じて変化する。さらに、プロペラ5の回転速度が同じであっても、高トルクでプロペラ5を回転させる場合には、ステータ41に供給される電力が低トルクの場合よりも大きいので、発電用コイル792で発生する電流が増加する。したがって、発光体789の発光状態は、回転速度およびトルクを含むプロペラ5の回転状態に応じて変化する。
【0152】
一方、図25Bに示す発電装置790は、リム31に取り付けられた複数の発電用コイル792と、ダクト26に取り付けられた複数の発電用マグネット793とを含む。発電用コイル792および発電用マグネット793は、径方向に対向している。発電用コイル792は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、発電用コイル792および発電用マグネット793が相対回転し、発電用コイル792を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、発電用コイル792および発電用マグネット793が相対回転し、発電用コイル792を通過する磁束が変化する。そのため、発電用コイル792に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0153】
[第8実施形態]
次に、この発明の第8実施形態について説明する。
この第8実施形態と前述の第1実施形態との主要な相違点は、光を発する発光体が、ダクトに配置されていることである。
図26は、この発明の第8実施形態に係る推進ユニット4の背面図である。図27Aおよび図27Bは、この発明の第8実施形態に係る推進ユニット4の一部の断面図である。図26〜図27Bにおいて、前述の図1〜図25Bに示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0154】
第8実施形態に係る船舶推進装置801は、第1実施形態に係る船舶推進装置1と同様の構成を備えている。すなわち、図27Aおよび図27Bに示すように、船舶推進装置801は、第2実施形態に係る船舶推進装置1の構成に加えて、光を発する複数の発光体789と、電力を発生する発電装置890と、発電装置890から発光体789に電力を供給する複数の基板791とを含む。図26に示すように、ダクト26は、複数の発光体789を保持している。ダクト26に保持されている複数の発光体789は、ダクト26の背面に沿って環状に配置されている。
【0155】
図27Aおよび図27Bに示すように、発光体789は、ダクト26に埋め込まれており、その一部が、ダクト26の背面から露出している。複数の基板791は、ダクト26に埋め込まれている。基板791は、複数の発光体789に電気的に接続されている。さらに、基板791は、発電装置890に電気的に接続されている。基板791は、発電装置890から発光体789に電力を供給することにより、発光体789を発光させる。発電装置890は、図27Aに示す発電用コイル894を含む構成であってもよいし、図27Bに示す発電用コイル894および発電用マグネット895を含む構成であってもよい。
【0156】
具体的には、図27Aに示す発電装置890は、ダクト26に取り付けられた複数の発電用コイル894を含む。発電用コイル894は、マグネット47に対向する位置でダクト26に取り付けられている。電動モータ7がプロペラ5を回転させると、マグネット47および発電用コイル894が相対回転し、発電用コイル894を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、マグネット47および発電用コイル894が相対回転し、発電用コイル894を通過する磁束が変化する。そのため、発電用コイル894に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0157】
一方、図27Bに示す発電装置890は、ダクト26に取り付けられた複数の発電用コイル894と、リム31に取り付けられた複数の発電用マグネット895とを含む。発電用コイル894および発電用マグネット895は、径方向に対向している。発電用マグネット895は、リム31と共にプロペラ軸線A2まわりに回転する。電動モータ7がプロペラ5を回転させると、発電用コイル894および発電用マグネット895が相対回転し、発電用コイル894を通過する磁束が変化する。同様に、エンジン6(図1A参照)がプロペラ5を回転させると、発電用コイル894および発電用マグネット895が相対回転し、発電用コイル894を通過する磁束が変化する。そのため、発電用コイル894に電流が発生する。したがって、エンジン6および電動モータ7の少なくとも一方がプロペラ5を回転させると、発光体789が発光する。発光体789の発光状態は、プロペラ5の回転状態に応じて変化する。
【0158】
[他の実施形態]
この発明の第1〜第8実施形態の説明は以上であるが、この発明は、前述の第1〜第8実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1〜第8実施形態では、電動モータが、ラジアル方向に対向するステータおよびロータを含むラジアルギャップモータである場合について説明した。しかし、電動モータは、アキシャル方向に対向するステータおよびロータを含むアキシャルギャップモータであってもよい。
【0159】
また、前述の第1〜第8実施形態のうちの少なくとも2つの構成が組み合わされてもよい。たとえば、前述の第3実施形態では、プロペラの中心部に回転軸が設けられていない構造について説明した。しかし、第1実施形態に係るプロペラの回転軸が、第3実施形態に係るプロペラの中心部に設けられていてもよい。すなわち、第1実施形態に係る構成と、第2実施形態に係る構成とが組み合わされてもよい。また、前述の第3〜6実施形態では、発光体が設けられていない場合について説明した。しかし、第7および第8実施形態に係る発光体が、第3〜6実施形態に係る推進ユニットに設けられていてもよい。
【0160】
また、前述の第1〜第8実施形態では、モータECUが、プロペラ速度検出装置の検出値に基づいてプロペラの回転速度を検出する場合について説明した。しかし、モータECUは、電動モータの誘起電圧から電動モータの回転角(ロータの位置)を検出し、電動モータの回転角に基づいてプロペラの回転速度を求めてもよい。すなわち、電動モータの誘起電圧からプロペラの回転速度を検出するプロペラ回転速度検出部が、モータECUに設けられていてもよい。この場合、プロペラ速度検出装置は設けられていなくてもよい。
【0161】
また、前述の第1〜第8実施形態では、エンジンECUおよびモータECUが船内に配置された共通のバッテリーに接続される場合について説明したが、エンジンECUとモータECUとはそれぞれ別のバッテリーに接続されていてもよい。これにより、モータの高出力化のために、モータECUに接続されたバッテリーを高電圧化することができる。この際、2つのバッテリーが、DC−DCコンバータを介して接続されており、2つのバッテリーの間で1方向または双方向の電力補完が行われてもよい。
【0162】
また、前述の第8実施形態では、プロペラの回転に伴って電力を発生する発電装置からの電力が、発光体に供給される場合について説明した。しかし、第8実施形態のように、発光体が、固定部分(ダクト)に配置されている場合、発電装置が設けられていなくてもよい。すなわち、電動モータに電力を供給するモータ電力源(バッテリー)からの電力が発光体に供給されてもよい。この場合、モータECUが、発光体への電力供給を制御することにより、発光体の発光状態を制御してもよい。
【0163】
また、前述の第1〜第8実施形態では、電動モータがプロペラを直接回転させる場合について説明した。しかし、電動モータは、前後進切替機構とプロペラとの間に配置されており、プロペラと共に回転する中間部材(たとえば、エンジン出力伝達軸)を回転させることにより、プロペラを回転させてもよい。すなわち、電動モータは、前後進切替機構より下流の部分(中間部材またはプロペラ)を回転させるように構成されていればよい。この構成によれば、前後進切替機構がいずれの状態であっても、電動モータは、プロペラを回転させることができる。したがって、電動モータは、前後進切替機構がいずれの状態であっても、エンジンの回転速度とプロペラの回転速度との差を変更することができる。
【0164】
また、前述の第1実施形態では、図12に示すように、レバー位置が出力の大きさに対応している場合について説明した。しかし、レバー位置がプロペラの回転速度に対応していてもよい。
具体的には、動力源がエンジンしか設けられていない船舶推進装置では、レバー位置がスロットル開度に対応しているので、レバー位置とプロペラの回転速度との関係は、船舶の負荷状態等に応じて変化する。さらに、エンジンがアイドリングしている状態でのプロペラの回転速度に対応する速度より低速で船舶を推進する場合には、ドッグクラッチの断続を繰り返す必要がある。さらに、前後進切替機構が中立状態でも、前後進切替機構内のオイル等によってエンジン出力伝達軸が回され、プロペラが回転する。したがって、プロペラの回転を完全に停止させることができない。そのため、動力源がエンジンしか設けられていない船舶推進装置では、レバー位置とプロペラの回転速度との関係が一定でない。
【0165】
一方、第1〜第8実施形態に係るハイブリッド式の船舶推進装置は、電動モータによってプロペラの回転速度を調整することにより、レバー位置とプロペラの回転速度との関係を一定に維持できる。さらに、電動モータによってプロペラを低速で回転させることができるので、ドッグクラッチの断続を繰り返さなくてもよい。しかも、前後進切替機構が中立状態のときに、プロペラを回転させるトルクがエンジン出力伝達軸に入力されたとしても、エンジン出力伝達軸からプロペラに加わるトルクとは反対方向のトルクを電動モータからプロペラに加えることができる。したがって、第1〜第8実施形態に係る船舶推進装置は、プロペラの回転を完全に停止させることができる。
【0166】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
以下に、特許請求の範囲に記載された構成要素と前述の実施形態における構成要素との対応関係を示す。
プロペラ軸線:プロペラ軸線A2
羽根:羽根30
リム:リム31、430
プロペラ:プロペラ5、305、405
ダクト:ダクト26
内燃機関:エンジン6
電動モータ:電動モータ7、407、507
船舶推進装置:船舶推進装置1、201、301、401、501、601、701、801
プロペラ回転軸:回転軸29
ステータ:ステータ41
ロータ:ロータ42
マグネット:マグネット47
シフト操作子:シフトレバー28b、リモコンユニット28c
前後進切替機構:前後進切替機構19
エンジン速度検出装置:エンジン速度検出装置50
プロペラ速度検出装置:プロペラ速度検出装置43
制御装置:制御装置X1
ドライブシャフト:ドライブシャフト18
出力軸:ドッグクラッチ24
エンジン出力伝達軸:エンジン出力伝達軸20
駆動ギヤ:駆動ギヤ358
従動ギヤ:従動ギヤ359
歯車伝達機構:歯車伝達機構357
前側リム:前側リム460
後側リム:後側リム461
前側電動モータ:前側電動モータ577
後側電動モータ:後側電動モータ578
回転量規制部:外周側規制部467、中心側規制部474
被支持部:前側被支持部468
支持部:前側支持部469
長孔:前側挿入孔468a
前側回転軸:前側回転軸462
後側回転軸:後側回転軸463
前側噛み合い部:前側噛み合い部475
後側噛み合い部:後側噛み合い部476
発光体:発光体789。
【0167】
発電用コイル:発電用コイル792、894
発電用マグネット:発電用マグネット793、895
【符号の説明】
【0168】
1 :船舶推進装置
5 :プロペラ
6 :エンジン
7 :電動モータ
18 :ドライブシャフト
19 :前後進切替機構
20 :エンジン出力伝達軸
24 :ドッグクラッチ
26 :ダクト
28b :シフトレバー
28c :リモコンユニット
29 :回転軸
30 :羽根
31 :リム
41 :ステータ
42 :ロータ
43 :プロペラ速度検出装置
47 :マグネット
50 :エンジン速度検出装置
201 :船舶推進装置
301 :船舶推進装置
305 :プロペラ
357 :歯車伝達機構
358 :駆動ギヤ
359 :従動ギヤ
401 :船舶推進装置
405 :プロペラ
407 :電動モータ
430 :リム
460 :前側リム
461 :後側リム
462 :前側回転軸
463 :後側回転軸
467 :外周側規制部
468 :前側被支持部
468a :前側挿入孔
469 :前側支持部
474 :中心側規制部
475 :前側噛み合い部
476 :後側噛み合い部
501 :船舶推進装置
507 :電動モータ
577 :前側電動モータ
578 :後側電動モータ
601 :船舶推進装置
701 :船舶推進装置
789 :発光体
792 :発電用コイル
793 :発電用マグネット
801 :船舶推進装置
894 :発電用コイル
895 :発電用マグネット
A1 :プロペラ軸線
X1 :制御装置
【特許請求の範囲】
【請求項1】
複数の羽根と、プロペラ軸線まわりに前記複数の羽根を取り囲む筒状のリムとを含み、前記プロペラ軸線まわりに回転可能なプロペラと、
前記プロペラ軸線まわりに前記プロペラを取り囲むダクトと、
前記ダクトに対して前記プロペラを回転させる内燃機関と、
前記リムを回転させることにより、前記ダクトに対して前記プロペラを回転させる電動モータとを含む、船舶推進装置。
【請求項2】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記複数の羽根と共に前記プロペラ軸線まわりに回転するプロペラ回転軸をさらに含み、
前記内燃機関は、前記プロペラ回転軸を回転させることにより、前記ダクトに対して前記プロペラを回転させる、請求項1に記載の船舶推進装置。
【請求項3】
前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含む、請求項1または2に記載の船舶推進装置。
【請求項4】
前記リムは、前記ロータの少なくとも一部を構成するマグネットを含む、請求項3に記載の船舶推進装置。
【請求項5】
前記電動モータは、リラクタンスモータである、請求項3に記載の船舶推進装置。
【請求項6】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行う制御装置とをさらに含む、請求項1〜5のいずれか一項に記載の船舶推進装置。
【請求項7】
前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させ、その後、前記シフトイン動作を行う、請求項6に記載の船舶推進装置。
【請求項8】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項1〜7のいずれか一項に記載の船舶推進装置。
【請求項9】
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替える、請求項8に記載の船舶推進装置。
【請求項10】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項1〜9のいずれか一項に記載の船舶推進装置。
【請求項11】
略鉛直方向に延びており、前記内燃機関によって回転駆動されるドライブシャフトと、
前後方向に延びる出力軸を含み、前記ドライブシャフトの回転を前記出力軸に伝達し、前記ドライブシャフトの回転方向に対する前記出力軸の回転方向を変更可能な前後進切替機構と、
前記出力軸の回転を前記プロペラに伝達するエンジン出力伝達軸とを含む、請求項1〜10のいずれか一項に記載の船舶推進装置。
【請求項12】
前記プロペラは、前記前後進切替機構の後方に配置されており、
前記出力軸と前記エンジン出力伝達軸とは、同軸である、請求項11に記載の船舶推進装置。
【請求項13】
前記プロペラは、前記前後進切替機構の前方に配置されており、
前記出力軸と前記エンジン出力伝達軸とは、同軸である、請求項11に記載の船舶推進装置。
【請求項14】
前記プロペラは、前記出力軸より下方に配置されており、
前記船舶推進装置は、前記エンジン出力伝達軸と共に回転する駆動ギヤと、前記駆動ギヤの回転が伝達され、前記リムと共に回転する従動ギヤとを含み、前記内燃機関の動力を前記リムに伝達する歯車伝達機構をさらに含む、請求項11に記載の船舶推進装置。
【請求項15】
前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含み、
前記内燃機関は、前記前側リムおよび後側リムのいずれか一方を回転させ、
前記電動モータは、前記前側リムおよび後側リムの他方を回転させ、
前記内燃機関および電動モータは、前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチを変更する、請求項1〜14のいずれか一項に記載の船舶推進装置。
【請求項16】
前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含み、
前記電動モータは、前記前側リムを回転させる前側電動モータと、前記後側リムを回転させる後側電動モータとを含み、前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチを変更する、請求項1〜14のいずれか一項に記載の船舶推進装置。
【請求項17】
前記前側電動モータおよび後側電動モータを制御することにより、前記前側リムおよび後側リムの相対回転量を制御する制御装置をさらに含む、請求項16に記載の船舶推進装置。
【請求項18】
前記前側リムおよび後側リムの相対回転量を規制する回転量規制部をさらに含む、請求項15〜17のいずれか一項に記載の船舶推進装置。
【請求項19】
前記回転量規制部は、前記リムおよび羽根のいずれか一方に設けられた支持部と、前記リムおよび羽根の他方に設けられており、前記支持部が挿入された長孔を区画する被支持部とを含む、請求項18に記載の船舶推進装置。
【請求項20】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記前側リムと共に前記プロペラ軸線まわりに回転する前側回転軸と、前記プロペラ軸線に沿って延びており、前記後側リムと共に前記プロペラ軸線まわりに回転する後側回転軸とをさらに含み、
前記回転量規制部は、前記前側回転軸および後側回転軸にそれぞれ設けられており、所定の角度範囲内で前記プロペラ軸線まわりに相対回転可能に噛み合う前側噛み合い部および後側噛み合い部を含む、請求項18または19に記載の船舶推進装置。
【請求項21】
前記プロペラの回転状態に応じて発光状態が変化する発光体をさらに含む、請求項1〜20のいずれか一項に記載の船舶推進装置。
【請求項22】
前記発光体は、前記ダクトおよびプロペラの少なくとも一方に配置されている、請求項21に記載の船舶推進装置。
【請求項23】
前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含み、
前記船舶推進装置は、少なくとも一部が前記ステータに対向する位置で前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルをさらに含み、
前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されている、請求項21または22に記載の船舶推進装置。
【請求項24】
前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルと、
前記ダクトに取り付けられており、前記発電用コイルに対向する発電用マグネットとをさらに含み、
前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されている、請求項21または22に記載の船舶推進装置。
【請求項25】
内燃機関と、
電動モータと、
前記内燃機関および電動モータの少なくとも一方によってプロペラ軸線まわりに回転駆動されるプロペラと、
前記内燃機関から前記プロペラへの動力の伝達経路上に配置されており、前記プロペラが前進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、前記プロペラが後進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構とを含み、
前記電動モータは、前記内燃機関から前記プロペラへの動力の伝達経路上において前記前後進切替機構より前記プロペラ側に配置されている、船舶推進装置。
【請求項26】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行う制御装置とをさらに含む、請求項25に記載の船舶推進装置。
【請求項27】
前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させ、その後、前記シフトイン動作を行う、請求項26に記載の船舶推進装置。
【請求項28】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項25〜27のいずれか一項に記載の船舶推進装置。
【請求項29】
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で前記前後進切替機構を中立状態から前進状態または後進状態に切り替える、請求項28に記載の船舶推進装置。
【請求項30】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項25〜29のいずれか一項に記載の船舶推進装置。
【請求項1】
複数の羽根と、プロペラ軸線まわりに前記複数の羽根を取り囲む筒状のリムとを含み、前記プロペラ軸線まわりに回転可能なプロペラと、
前記プロペラ軸線まわりに前記プロペラを取り囲むダクトと、
前記ダクトに対して前記プロペラを回転させる内燃機関と、
前記リムを回転させることにより、前記ダクトに対して前記プロペラを回転させる電動モータとを含む、船舶推進装置。
【請求項2】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記複数の羽根と共に前記プロペラ軸線まわりに回転するプロペラ回転軸をさらに含み、
前記内燃機関は、前記プロペラ回転軸を回転させることにより、前記ダクトに対して前記プロペラを回転させる、請求項1に記載の船舶推進装置。
【請求項3】
前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含む、請求項1または2に記載の船舶推進装置。
【請求項4】
前記リムは、前記ロータの少なくとも一部を構成するマグネットを含む、請求項3に記載の船舶推進装置。
【請求項5】
前記電動モータは、リラクタンスモータである、請求項3に記載の船舶推進装置。
【請求項6】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行う制御装置とをさらに含む、請求項1〜5のいずれか一項に記載の船舶推進装置。
【請求項7】
前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させ、その後、前記シフトイン動作を行う、請求項6に記載の船舶推進装置。
【請求項8】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項1〜7のいずれか一項に記載の船舶推進装置。
【請求項9】
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で、前記前後進切替機構を中立状態から前進状態または後進状態に切り替える、請求項8に記載の船舶推進装置。
【請求項10】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、後進方向の推力が発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項1〜9のいずれか一項に記載の船舶推進装置。
【請求項11】
略鉛直方向に延びており、前記内燃機関によって回転駆動されるドライブシャフトと、
前後方向に延びる出力軸を含み、前記ドライブシャフトの回転を前記出力軸に伝達し、前記ドライブシャフトの回転方向に対する前記出力軸の回転方向を変更可能な前後進切替機構と、
前記出力軸の回転を前記プロペラに伝達するエンジン出力伝達軸とを含む、請求項1〜10のいずれか一項に記載の船舶推進装置。
【請求項12】
前記プロペラは、前記前後進切替機構の後方に配置されており、
前記出力軸と前記エンジン出力伝達軸とは、同軸である、請求項11に記載の船舶推進装置。
【請求項13】
前記プロペラは、前記前後進切替機構の前方に配置されており、
前記出力軸と前記エンジン出力伝達軸とは、同軸である、請求項11に記載の船舶推進装置。
【請求項14】
前記プロペラは、前記出力軸より下方に配置されており、
前記船舶推進装置は、前記エンジン出力伝達軸と共に回転する駆動ギヤと、前記駆動ギヤの回転が伝達され、前記リムと共に回転する従動ギヤとを含み、前記内燃機関の動力を前記リムに伝達する歯車伝達機構をさらに含む、請求項11に記載の船舶推進装置。
【請求項15】
前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含み、
前記内燃機関は、前記前側リムおよび後側リムのいずれか一方を回転させ、
前記電動モータは、前記前側リムおよび後側リムの他方を回転させ、
前記内燃機関および電動モータは、前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチを変更する、請求項1〜14のいずれか一項に記載の船舶推進装置。
【請求項16】
前記リムは、前記プロペラ軸線まわりの相対回転に伴って前記プロペラ軸線に対する前記羽根の傾き角度が変化するように前記羽根を支持する前側リムおよび後側リムを含み、
前記電動モータは、前記前側リムを回転させる前側電動モータと、前記後側リムを回転させる後側電動モータとを含み、前記前側リムおよび後側リムを前記プロペラ軸線まわりに相対回転させることにより、前記プロペラのピッチを変更する、請求項1〜14のいずれか一項に記載の船舶推進装置。
【請求項17】
前記前側電動モータおよび後側電動モータを制御することにより、前記前側リムおよび後側リムの相対回転量を制御する制御装置をさらに含む、請求項16に記載の船舶推進装置。
【請求項18】
前記前側リムおよび後側リムの相対回転量を規制する回転量規制部をさらに含む、請求項15〜17のいずれか一項に記載の船舶推進装置。
【請求項19】
前記回転量規制部は、前記リムおよび羽根のいずれか一方に設けられた支持部と、前記リムおよび羽根の他方に設けられており、前記支持部が挿入された長孔を区画する被支持部とを含む、請求項18に記載の船舶推進装置。
【請求項20】
前記プロペラは、前記プロペラ軸線に沿って延びており、前記前側リムと共に前記プロペラ軸線まわりに回転する前側回転軸と、前記プロペラ軸線に沿って延びており、前記後側リムと共に前記プロペラ軸線まわりに回転する後側回転軸とをさらに含み、
前記回転量規制部は、前記前側回転軸および後側回転軸にそれぞれ設けられており、所定の角度範囲内で前記プロペラ軸線まわりに相対回転可能に噛み合う前側噛み合い部および後側噛み合い部を含む、請求項18または19に記載の船舶推進装置。
【請求項21】
前記プロペラの回転状態に応じて発光状態が変化する発光体をさらに含む、請求項1〜20のいずれか一項に記載の船舶推進装置。
【請求項22】
前記発光体は、前記ダクトおよびプロペラの少なくとも一方に配置されている、請求項21に記載の船舶推進装置。
【請求項23】
前記電動モータは、前記ダクトの少なくとも一部によって構成されたステータと、前記リムの少なくとも一部によって構成されたロータとを含み、
前記船舶推進装置は、少なくとも一部が前記ステータに対向する位置で前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルをさらに含み、
前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されている、請求項21または22に記載の船舶推進装置。
【請求項24】
前記リムに取り付けられており、前記リムと共に前記プロペラ軸線まわりに回転する発電用コイルと、
前記ダクトに取り付けられており、前記発電用コイルに対向する発電用マグネットとをさらに含み、
前記発光体は、前記発電用コイルに接続されており、前記プロペラに配置されている、請求項21または22に記載の船舶推進装置。
【請求項25】
内燃機関と、
電動モータと、
前記内燃機関および電動モータの少なくとも一方によってプロペラ軸線まわりに回転駆動されるプロペラと、
前記内燃機関から前記プロペラへの動力の伝達経路上に配置されており、前記プロペラが前進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する前進状態と、前記内燃機関と前記プロペラとの接続を解除する中立状態と、前記プロペラが後進方向の推力を発生するように前記内燃機関と前記プロペラとを接続する後進状態とのうちのいずれかに切り替わる前後進切替機構とを含み、
前記電動モータは、前記内燃機関から前記プロペラへの動力の伝達経路上において前記前後進切替機構より前記プロペラ側に配置されている、船舶推進装置。
【請求項26】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン操作が前記シフト操作子に行われたときに、前記内燃機関の回転速度と前記プロペラの回転速度との差である速度差が所定の範囲内の場合にのみ、前記前後進切替機構を中立状態から前進状態または後進状態に切り替えるシフトイン動作を行う制御装置とをさらに含む、請求項25に記載の船舶推進装置。
【請求項27】
前記制御装置は、前記シフトイン操作が前記シフト操作子に行われたときに、前記速度差が前記所定の範囲内でない場合、前記内燃機関および電動モータの少なくとも一方を制御することにより、前記速度差を前記所定の範囲内まで変化させ、その後、前記シフトイン動作を行う、請求項26に記載の船舶推進装置。
【請求項28】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態および後進状態の一方から他方に切り替える反転操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、反転前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項25〜27のいずれか一項に記載の船舶推進装置。
【請求項29】
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えた後、前記電動モータを制御することにより、前記反転前方向とは反対の反転後方向に前記プロペラを回転させ、前記反転後方向への前記プロペラの回転速度が接続速度以上の状態で前記前後進切替機構を中立状態から前進状態または後進状態に切り替える、請求項28に記載の船舶推進装置。
【請求項30】
前記船舶推進装置が発生する推力の方向を前進方向と後進方向との間で切り替えるために操船者によって操作されるシフト操作子と、
前記内燃機関の回転速度を検出するエンジン速度検出装置と、
前記プロペラの回転速度を検出するプロペラ速度検出装置と、
前記前後進切替機構を制御する制御装置とを含み、
前記制御装置は、前記前後進切替機構を前進状態または後進状態から中立状態に切り替えるシフトアウト操作が前記シフト操作子に行われたときに、前記電動モータを制御することにより、シフトアウト前方向への前記プロペラの回転速度を切断速度まで低下させた後、前記前後進切替機構を前進状態または後進状態から中立状態に切り替える、請求項25〜29のいずれか一項に記載の船舶推進装置。
【図1A】


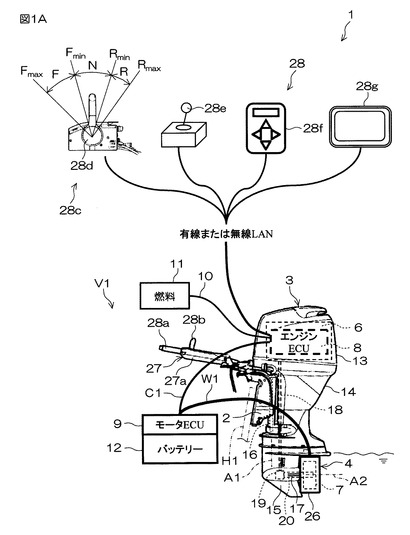
【図1B】
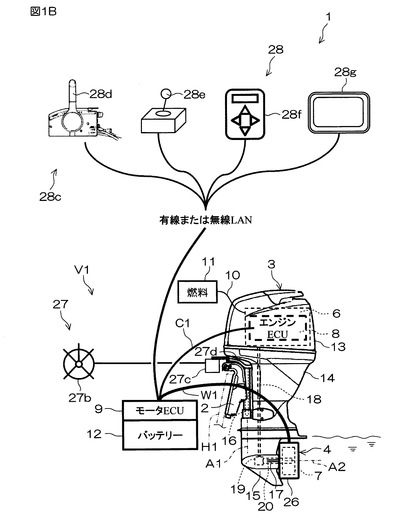
【図2】

【図3】
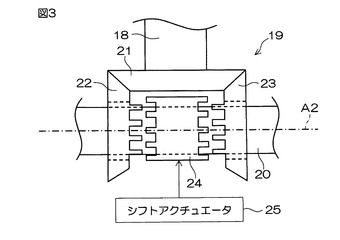
【図4】
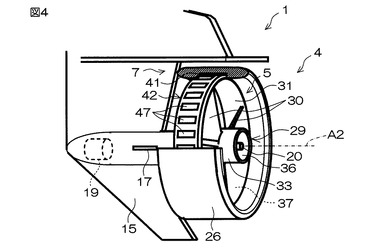
【図5】

【図6】

【図7A】
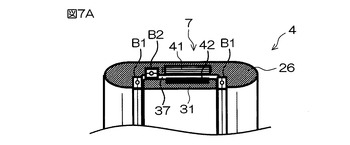
【図7B】

【図8A】

【図8B】
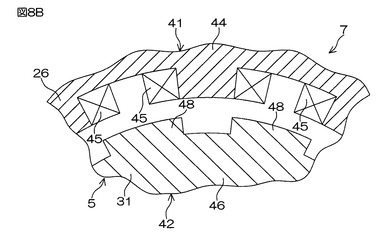
【図9A】
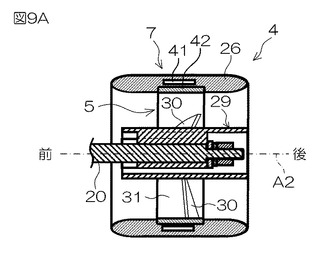
【図9B】
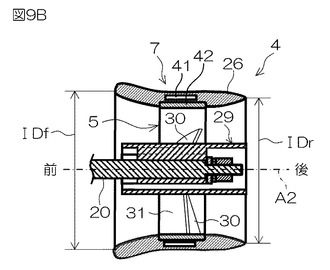
【図10A】
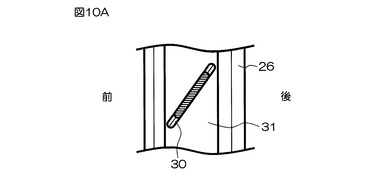
【図10B】
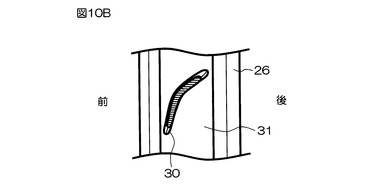
【図11】

【図12】
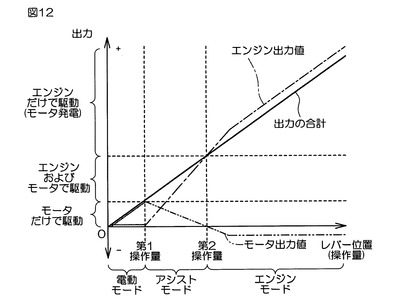
【図13A】
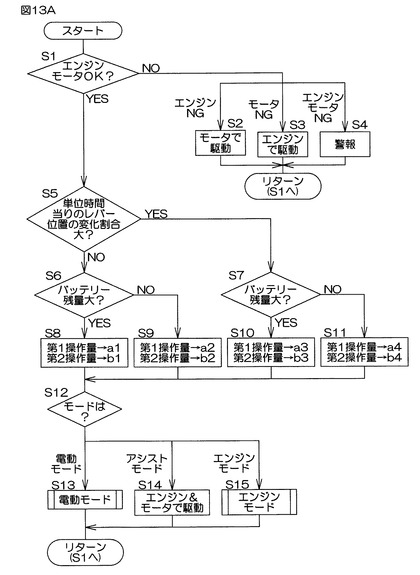
【図13B】
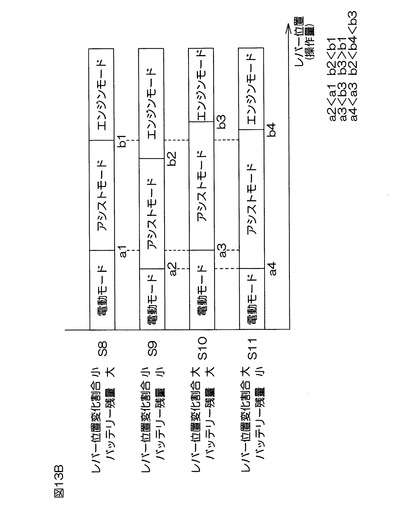
【図13C】
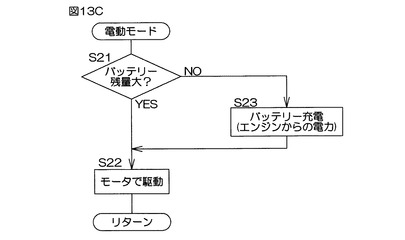
【図13D】
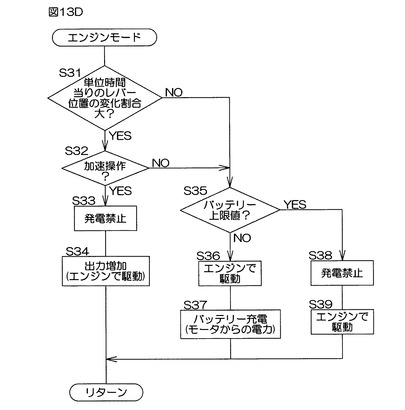
【図14A】
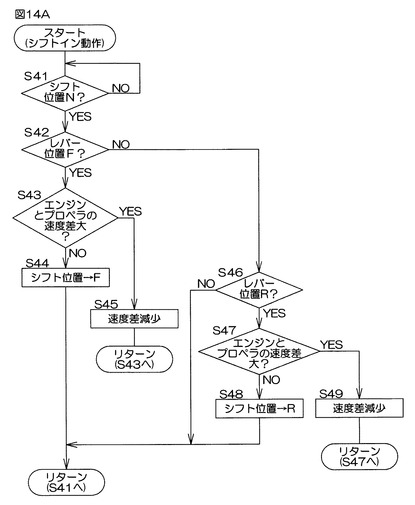
【図14B】

【図15A】
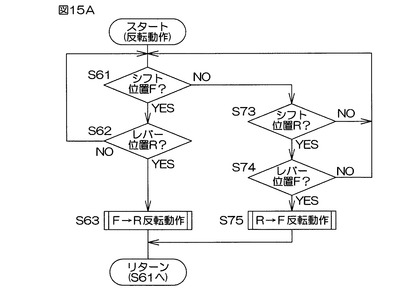
【図15B】

【図16A】
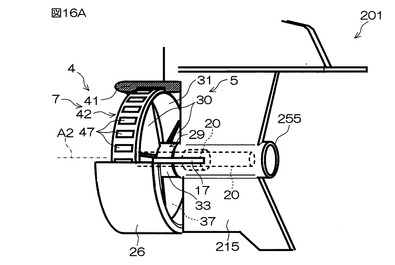
【図16B】
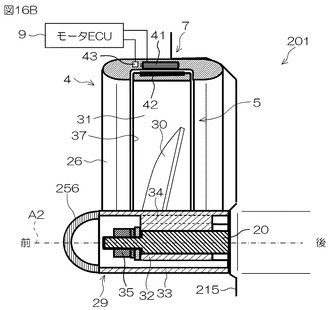
【図17A】

【図17B】
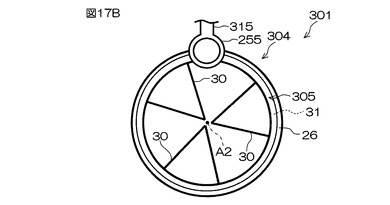
【図17C】

【図18】
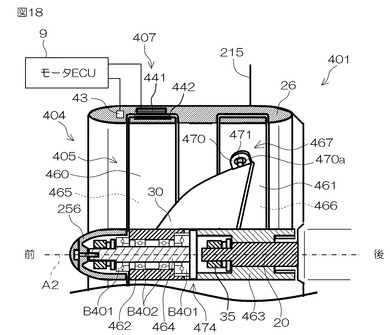
【図19A】
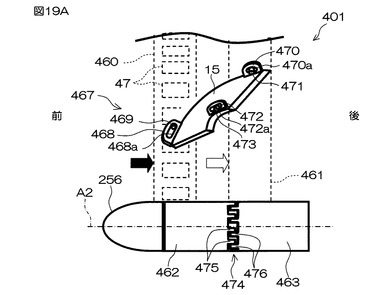
【図19B】
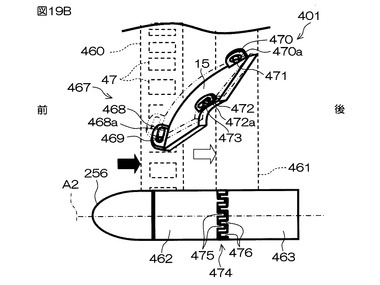
【図20】
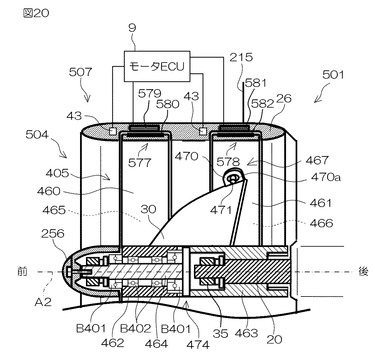
【図21A】
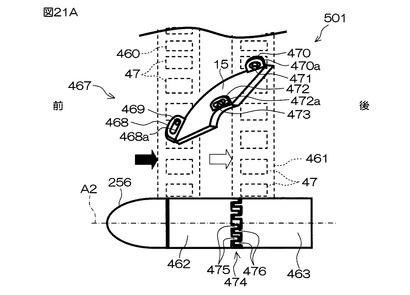
【図21B】
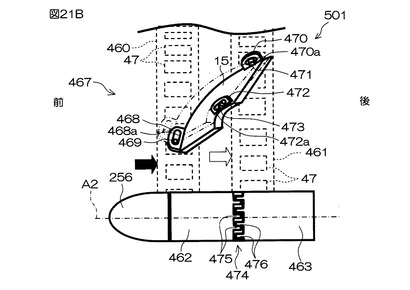
【図22A】
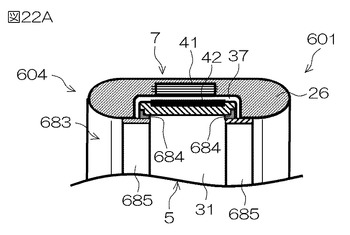
【図22B】
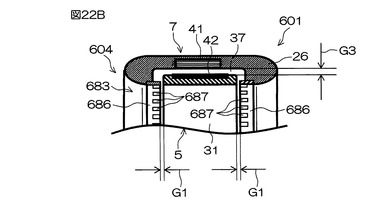
【図23】
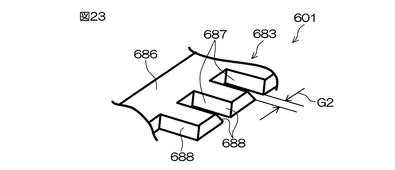
【図24】

【図25A】
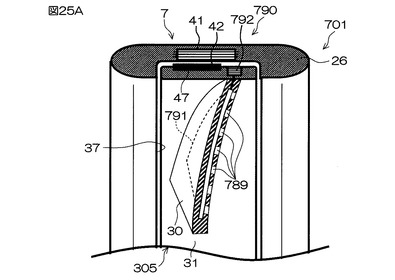
【図25B】
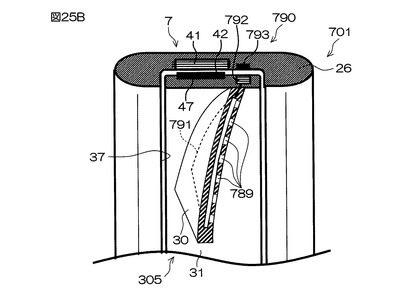
【図26】
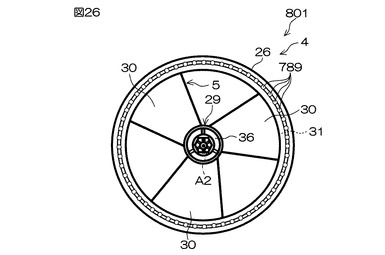
【図27A】

【図27B】
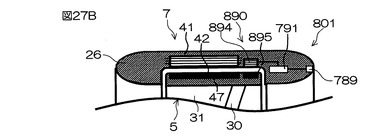
【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10A】
【図10B】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図14A】
【図14B】
【図15A】
【図15B】
【図16A】
【図16B】
【図17A】
【図17B】
【図17C】
【図18】
【図19A】
【図19B】
【図20】
【図21A】
【図21B】
【図22A】
【図22B】
【図23】
【図24】
【図25A】
【図25B】
【図26】
【図27A】
【図27B】
【公開番号】特開2013−100014(P2013−100014A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244662(P2011−244662)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]