
速度が曖昧な物標の非コヒーレント積分のための技法
【課題】パルスドップラーレーダ信号を処理して物標を検出するための方法を提供する。
【解決手段】周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。
【解決手段】周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
発明の分野
本発明は概括的にはレーダ信号処理に関し、より詳細には目標(物標)のレンジ(距離)および/または半径方向速度を判定するための装置および方法に関する。
発明の背景
当該技術分野において知られているように、物体のレンジおよび/または相対速度(すなわちドップラー速度)を判定するために、パルスドップラーレーダシステムのようなレーダシステムが用いられる。レーダパルスは、パルス繰返し周波数(PRF)と呼ばれる速度で送信される。連続するパルス間の時間間隔はパルス繰返し間隔(PRI)と呼ばれる。パルス送信後の所定の時間中に、レーダシステムによって、レーダ反射(エコー)信号がサンプリング、すなわちゲーティングされる。すなわち、パルス送信と、サンプルが得られた時間との間の時間差に基づいて、個々のサンプルは、レーダシステムと、サンプリングされるエコーを生成する物体との間のレンジ、すなわち距離に対応する。その過程はレンジゲーティングと呼ばれ、サンプルが得られる各時間は、サンプルが得られる時間に対応するレンジにある物体によって生成されるエコーのレンジセル、すなわちレンジ(距離)ゲートを表す。
【0002】
レーダシステムと物体との間に相対速度(すなわちドップラー速度)がある応用形態では、その物体を追跡するために、パルス送信後にレーダエコーサンプルがサンプリングされる時間が、レーダシステムと物体との間の相対速度に応じて変化する。したがって、物体がレーダシステムから離れる方向に移動している場合には、レーザパルスが送信された時間に対する、レーダエコーがサンプリングされる時間が、レーダシステムと物体との間の相対速度、すなわちドップラー速度に比例する割合で、レーダパルス毎に長くならなければならない。同じように、物体がレーダシステムに向かって移動している場合には、レーザパルスが送信された時間に対する、レーダエコーがサンプリングされる時間が、レーダシステムと物体との間のドップラー速度に比例する割合で、レーダパルス毎に短くならなければならない。
【0003】
物体のドップラー速度を判定するために、複数の送信されたレーダパルスからのレーダエコーが処理される。より詳細には、複数の連続して送信されたレーダパルスからの各組のレーダエコーはドウェルと呼ばれる。レーダシステムは複数の連続したドウェルを生成する。ドウェル毎に、レーダシステムは、複数の連続したレンジゲートのそれぞれにおいて、複数のドップラー周波数ウインドウ(窓)を判定する。
【0004】
言い換えると、ドウェル毎に、レーダシステムは、複数の連続したレンジゲートのそれぞれにおいて複数のドップラー周波数窓を判定し、ドップラー行列(マトリックス)を与える。N個のパルスが存在する場合には、N個の周波数窓(あるいはビン)が存在する。レンジゲートの数は、各PRIから得られる入力サンプルの数に対応する。M個の入力サンプルがN個のPRIそれぞれから抽出される場合には、M回の離散フーリエ変換(DFT)が実行され、M個のレンジおよびN個の周波数窓からなるマトリックスが生成される。
【0005】
ドップラー速度の分解能を細かくすると、一般的にドウェル当たり多数のレーダエコー(すなわち、相対的な長いデータ収集時間)が必要になる。ドップラー速度が相対的に速い物体の場合、このデータ収集時間は、物体からレーダシステムへのレンジが大きな変化を受ける可能性がある時間間隔になる。レンジ精度がドウェルにわたる物体の動きよりも劣る場合には、各ドウェルの中央に物体へのレンジを保持し、それによりレーダシステムが最大の信号対雑音比で物体へのレンジを追跡できるようにするために、或るタイプの動的なレンジゲート調整(すなわちレンジゲート位置決めシステム)が必要とされる。
【0006】
種々のシステムは、レンジ「変動(ウォーキング)」補償あるいは速度補助技法を用いて、ドウェル中にレンジゲートを移動させ、物体がレンジゲートの「窓」(すなわち持続時間)を通過するのを防止している。たとえば、本発明と同じ譲受人に譲渡され、参照により本明細書に援用される、1999年8月24日に発行された「Radar System」と題する米国特許第5,943,003号は、物標のレンジおよび/または相対速度を判定するための1つの改善された技法を教示する。パルス式レーダの応用形態では、多くの場合に、ドウェル積分および広い周波数ダイバーシティを有する無線周波数信号を用いて、すなわち広い周波数レンジにわたって変化する搬送波周波数を有するレーダ信号を用いて、物標のレンジおよび半径方向速度を判定することが望ましい。また、パルス圧縮技法を用いて、より短いパルスの分解能を保持しながら、より長い信号パルスを用いて物標に付加的なエネルギーを指向させることも望ましい。レーダ信号は一連のパルスとして送信され、これらのパルスはそれぞれ、エコー信号を受信するために割り当てられる時間間隔とともに、コヒーレント処理間隔(CPI)を形成する。各CPIは異なる搬送波周波数を用いることができ、ドウェル周期あるいはドウェルサイクルはCPIのシーケンス(列)として示される。各CPI中に受信される信号の複数のDFTが、物標の信号対干渉比を高めるための手段として一般的に用いられる。しかしながら、その変換は、数学的に積分するのが難しい。CPI間の無線周波数(RF)シフトによって、物標のドップラー周波数が変化する。処理中に、受信された信号は周波数によって区分され、複数のフィルタビンに入れられて、フィルタビン番号を割り当てられる。周波数ダイバーシティ(すなわち、パルス列の搬送波周波数を変更すること)を用いて、従来の処理技法で物標を検出するとき、異なる搬送波周波数に起因するドップラー周波数の変動はビンシフトと呼ばれる。
【0007】
パルス式ドップラーレーダの場合、ドップラービンが周波数で揃えられ(位置調整され)、測定されることになるパラメータ、たとえば到来速度に関しては揃えられないので、種々の搬送波周波数のレンジ−ドップラーマトリックスを非コヒーレントに積分するのは難しい。それゆえ、種々のドップラービン内の値が非コヒーレントに加算されることになる方法を判定するためのアルゴリズムが必要とされる。この揃え方の問題は一般的に、「ビンシフト」問題と呼ばれる。さらに、ドウェル時間およびレーダパルス繰返し周波数(PRF)に応じて、ドップラー応答は周期的である。この結果として、高いPRFを用いるときに真のドップラーとともにエイリアスが測定されるので、物標のためのドップラーが曖昧になる可能性がある。レーダ信号を処理する際に時として、ドップラー位相補正を追加することが望ましいが、曖昧なドップラー信号が正確にわからない場合、位相補正が不正確になり、それによりレンジレートおよびレンジ誤差を生じる可能性がある。従来のシステムは非コヒーレント積分(NCI)を実施するために、ビンシフト問題を補正するためのポスト(事後)処理技法を必要とする。事後処理をしても物標拡散のような他の問題はそのままであり、従来のシステムでは、パルス圧縮のために必要とされる複雑な位相補正技法が存在する。
【0008】
それゆえ、信号ドップラー周波数を揃える(位置調整する)ためにレーダエコー信号の多大な事後処理を必要とすることなく、非コヒーレント積分による信号の検出可能性を高めることが望ましいであろう。
発明の概要
本発明によれば、パルスドップラーレーダ信号を処理して物標を検出するための方法は、レーダシステムから、所定の可変周波数を有するレーダ信号を送信すること、或る周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信すること、および可変周波数スケールを有するフーリエ変換を用いて、物標エコー信号を変換することを含む。そのような技法を用いる場合、信号ドップラー周波数を位置調整する(揃える)ためにレーダエコー信号の多大な事後処理を必要とすることなく、非コヒーレント積分による信号の検出可能性が高められる。本発明の技法は、複数のドウェルを積分することを利用して、より高い感度を達成し、周波数ダイバーシティを用いて、物標断面積を拡大し、RFマルチパス干渉を軽減する。この技法は、DFTの式を実効的に変更することにより、ビンシフト問題を解決する。式を変更する結果として、信号のスペクトル成分の「物標速度」正規化バージョンが生成されるので、用いられるRF搬送波周波数毎に、同じDFTビン内で物標エコーが揃えられる。
【0009】
本発明のさらに別の態様によれば、その技法はさらに、非コヒーレント積分のために半径方向速度マトリックスを揃えること、ドップラーエイリアス(偽信号)から生じる複数の検出を特定すること、および複数の検出からドップラーエイリアスを除去することを含む。このような技法を用いることによって、比較的高いPRFを用いて、システム内の速度の曖昧性が解決される。変更された技法は、複数の検出をフーリエ変換して、任意の所望の下限および上限に対して設定されることができる半径方向速度空間を生成する。半径方向速度は、レンジ/ドップラーマトリックス内に、種々の搬送波周波数の場合に種々の周期で周期的に現われる。正確なレンジレートにおいてのみ、受信された信号が揃えられるであろう。ドップラーエイリアスを生じる任意の検出が判定され、検出リストから除外される。最小および最大の両方の所望のレンジレートの範囲はこの過程では制限されないので、曖昧でないレンジレートゾーンは処理時間によってのみ制限される。それゆえ、正確なドップラーを得るために、任意のドップラー位相補正を行うことができ、結果として生成されるレンジおよび半径方向速度誤差が低減される。
【0010】
一実施形態では、変更されたDFT技法は、時間サンプルを、ドップラー周波数空間ではなく、半径方向速度空間に変換する。半径方向速度マトリックスによって結果として生成されるレンジは、非コヒーレント積分のために予め揃えられる。半径方向速度の限度は、ドウェルの時間、あるいはコヒーレント処理間隔(CPI)内のパルスの数によっては制限されない。半径方向速度の曖昧性の分解能が直接的に判定される。さらに、適用される任意のドップラー位相補正が正確な曖昧でないドップラー領域において適用され、起こり得るレンジおよび半径方向速度誤差が低減される。
発明の詳細な説明
本発明の上記の特徴、および本発明自体は、図面を参照する以下の説明から、より十分に理解することができるであろう。
【0011】
本発明の詳細な説明を提供する前に、その説明において用いられる用語のうちのいくつかを定義することが有用である。本明細書において用いられるとき、コヒーレント処理間隔(CPI)はレーダシステムが所定の搬送波周波数において送信される一連のパルスを送信するための時間、およびそのパルスを反射する物体からの対応するエコー信号を受信するための時間である。本明細書において用いられるとき、非コヒーレント積分(NCI)は、いくつかのCPIそれぞれに含まれるエコー信号の積分を用いて合成する処理を指している。NCIによって合成される信号は、大きさの値のみを含み、位相情報を含まない。所定のパルス繰返し周波数は、それぞれ一対のパルス間のパルス繰返し間隔(PRI)と同じであると言うことができる。ドウェルは、それぞれが異なる搬送波周波数を有する複数のCPIがレーダシステムによって送信および受信される所定の時間である。
【0012】
本明細書において用いられるとき、「物標ドップラー信号」は、フィルタバンク、あるいは等価的に離散フーリエ変換(DFT)を用いて物標からのエコー信号を処理する結果としてのレンジ−ドップラーマトリックス内のドップラー値あるいは要素を指している。本発明の変更されたDFTで処理されるとき、用語「物標半径方向速度信号」は、レンジ−半径方向速度マトリックス内の半径方向速度値を指している。本明細書において用いられるとき、「物標信号」は、フィルタバンク、あるいは同じく離散フーリエ変換(DFT)を用いて物標からのエコー信号を処理することから生じる1組の要素内の1つの区別できる要素を指している。
【0013】
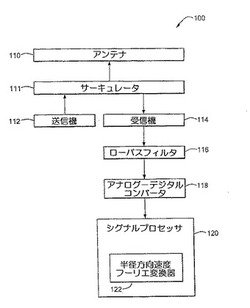
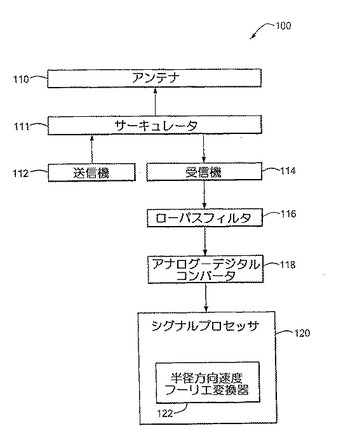
ここで図1を参照すると、1つの例示的なパルスドップラーレーダシステム100が、アンテナ110と、それに接続される送信機112および受信機114とを備える。システム100はさらに、受信機114に接続されるローパスフィルタ116と、ローパスフィルタ116に接続されるアナログ−デジタルコンバータ118と、アナログ−デジタルコンバータ118に接続されるシグナルプロセッサ120とを備える。シグナルプロセッサ120は半径方向速度高速フーリエ変換(FFT)変換器122を含む。アンテナ110は、既知の技術を用いるサーキュレータ111によって送信機112あるいは受信機114に選択的に結合される。サーキュレータ111の1つの目的は、送信機112と受信機114との直接的結合を防止することである。
【0014】
半径方向速度FFT変換器122は、従来のドップラー周波数FFT変換器の代わりになるものであり、後に説明するように動作する。一実施形態では、半径方向速度FFT変換器122は、以下の式によって与えられる変更されたDFTを提供する。
【0015】
【数4】

【0016】
ここで、
di=λ0/λi
であり、
λ0は所定の波長であり、
λiはCPI#iを含むパルスの波長であり、
Nは1つのCPI内で処理されるパルスの数であり、
kは周波数インクリメント指数(添字)であり、
pはデジタル化された受信信号の時間サンプルを表す添字であり、
Xp(k)はk*PRF/Nの周波数ビン内の信号エコーエネルギーの量であり、
xp(n)は、時間サンプルp、PRIiにおける時間領域(ドメイン)受信信号である。
式1において、周波数インクリメントを表す添字kは、1つのCPI内で処理されるパルスの数によって制限され、ここではNに等しい。
【0017】
動作時に、所望の送信周波数が選択される。波長λ0は最も高い周波数に割り当てられる。CPIのパルス間隔はこの最も高い周波数で送信され、システム100は通常、最初にレンジ内で、その後、式1のFFT(すなわちdi=1)でデータを処理する。波長λiを有する次の周波数は以下の比を形成する。
【0018】
di=λ0/λi
第2のCPIが処理され、新たな1組のレンジ−半径方向速度セルが導出される。可変波長スケーリングファクタdiは、波長と周波数との間が逆の関係であるので、対応する周波数スケーリングファクタと等価であることが理解される。
【0019】
この方法は、まさに処理中に、データを正規化するという利点を有する。データ事後処理(ソートルーチンおよび補間ルーチンで必要とされるような)は不要である。この実施形態では、物標ドップラー周波数がレーダPRFよりも大きい場合には、変換器出力はもはや揃えられないことに留意されたい。
【0020】
変換をさらに改良することにより、複数のドップラーサイクルが与えられ、曖昧な速度の問題が取り扱われる。以下の変換は、次数のMの曖昧な速度で任意の物標を正規化する。
【0021】
【数5】
【0022】
ここで、di=λ0/λiであり、
Mは物標速度曖昧性の次数(任意の正または負の整数)であり、kの最大値および最小値に限界があるために、Mが用いられる。Mは以下の式に従って、図2に関連して説明するような整数値をとる。
【0023】
【数6】
【0024】
ここで、NはCPI当たりのパルス数であり、
kは周波数インクリメントを表す添字であり、
nはPRIを表す添字であり、
xp(n)は、時間nにおける時間領域受信信号、すなわちCPIiのためのPRIである。
項diの下付き文字iは異なるドウェルに用いられることに留意されたい。
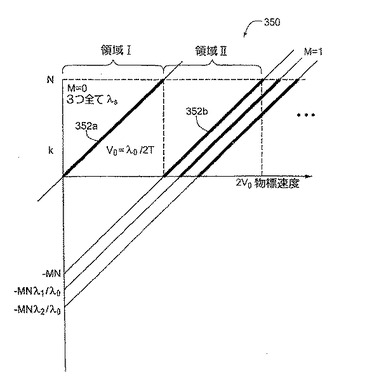
ここで図2を参照すると、複数の曲線群352a、352b〜352mを含む図350が、式2の変換が任意の物標ドップラーの場合の変換出力を如何に揃えるかを示す。それぞれ異なる波長λiを有する複数のレーダデータドウェルが実行されるとき、式1の変換は、選択されたレーダPRF未満のドップラー周波数を有する物標速度を正規化する。式1の変換では、λ0はレーダにおいて用いられる最も短い波長である。レーダシステムのシステム要件に応じて、λ0のための種々の選択があることは当業者には理解されよう。
【0025】
任意の速度vを有する物標を表す入力シーケンス(列)は以下のようにモデル化することができる。
【0026】
【数7】
【0027】
T≡レーダパルス繰返し間隔
入力信号のこのモデルが式1の基本変換に代入されるとき、その結果は以下のようになる。
【0028】
【数8】
【0029】
以下の式が成り立つときに、Xi(k)が主なピークを有することが明らかになる。
【0030】
【数9】
【0031】
M≡任意の正または負の整数
この式は以下の式によって表すことができる。
【0032】
【数10】
【0033】
この式はフィルタ番号kを示し、フィルタ番号kは任意の速度vの場合の最大信号エネルギーを含むであろう。それは一群の直線の式であり、物標速度vだけでなく、レーダ波長λiにも依存し、後に示されることになる整数Mは物標速度曖昧性の次数であることに留意されたい。di=λ0/λiであることを思い起こすと、その式は以下のように簡略化される。
【0034】
【数11】
【0035】
この形では、どのレーダ波長が用いられるかとは無関係に、直線の勾配は一定になっている。
【0036】
図2の例では、以下の3つの異なる波長を有する3つのレーダドウェルが用いられる。
【0037】
λ0=.03メートル(10GHz)
λ1=.0333メートル(9GHz)
λ2=.0375メートル(8GHz)
これらの異なる波長およびMのいくつかの値の場合の曲線群が図2に示される。各式は以下の領域においてのみ有効である。
【0038】
0≦ k≦N−1
M=0の場合の曲線群は1つの曲線に収束する。有効性の領域は0mpsからv=λ0/2T≡v0に及ぶ。それゆえ、変更された以下に示す変換は第1の速度曖昧性v0(遅い物標速度を有する領域I)内の速度で物標を正規化する。
【0039】
【数12】
【0040】
M=1の場合、第2の曲線群が存在する。今度は、それらの曲線は波長λi毎に異なる。M=1の場合の3つの曲線は平行であるが、それぞれ以下の点において別々に縦座標と交差する。
【0041】
−MN(λi/λ0)
物標の速度が領域II、v0≦ v≦ 2v0内に存在する場合には、ピークエネルギー物標フィルタ(すなわちビン)の数はレーダドウェル毎に変化する。結果として、1つの物標を積分するために、これらの信号変換を単に加算することができなくなる。
【0042】
これらの信号変換を積分するために、M=1の場合に、それらの曲線は一致するようにシフトされなければならない。M=1の曲線群を検査することにより、各曲線が量MN[(1/di)−1]だけ上方にシフトされる必要があることは理解されよう。kの元の式は以下のとおりである。
【0043】
【数13】
【0044】
シフトされる量が加算されて以下の式が与えられる。
【0045】
【数14】
【0046】
この式は、di/Nを乗算し、式3に示されるMを与えるように移項することにより、最大値、すなわち検出毎の信号の最大値を得るために、元の位相信号の式、すなわち式10に類似するように変換される。項e−2πjMdi(DFTフェーザ(phasor)とも呼ばれる)が、入力列の各サンプルにかけられる重み付け関数として、その変換に加えられる。それゆえ、式1および式2の変換は、DFTフェーザが速度領域の種々の領域において揃えられるように受信信号に位相シフト重み付け関数を適用することにより、次数Mの曖昧な速度で任意の物標を正規化する。
【0047】
別の一実施形態では、半径方向速度FFT変換器122は以下の式から導出されるDFTを与える。
【0048】
【数15】
【0049】
式12はCPIの時間Tおよびドップラー位相インクリメント値Δfdを含む。TΔfdmax=1という標準的な条件が式3に与えられ、Δfd間の関係が示され、それは以下の式を与える。
【0050】
【数16】
【0051】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
mはCPIを表す添字であり、
NはCPI内のパルス数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Ψp,n,mは周波数領域の関数であり、時間を表す添字p、周波数を表す添字kおよびCPIを表す添字mを有し、
Ψp,n,mは時間領域受信信号であり、時間サンプルを表す添字p、パルスを表す添字n、CPIを表す添字mを有する。
【0052】
式12および式13では、所望の半径方向速度レンジに基づいて、kの限度が規定されるので、式2において用いられるような項Mは不要である。kの限度、すなわちkminおよびkmaxは式14および式15において定義される。その際、NCI内の周波数毎のkの最小値および最大値は周波数に依存しない式によって決定される。
【0053】
【数17】
【0054】
【数18】
【0055】
ここで、式12および式13は、式1および式2の表現とは異なる表記法を用いることに留意されたい。式12および式13では、ΨがXの代わりに用いられる。式12および式13は、変数の代わりの下付き文字として、CPIを表す添字および時間あるいは周波数を表す添字の両方を用いる。標準的なDFTに対する本発明による変更を表し、かつ実施するためのいくつかの等価な方法が存在することは当業者には理解されよう。式1および式2を用いる実施形態、ならびに式12および式13を用いる実施形態は、可変周波数スケールを有する離散フーリエ変換を用いることに関する2つの例にすぎない。
【0056】
このFFT内の以下の項は、それぞれ異なる搬送波周波数において得られる、複数のレーダCPIの場合のドップラー周波数正規化を与える。
【0057】
【数19】
【0058】
その正規化は、結果として生成されるレーダデータの正規化および「積分」を簡単にする。
【0059】
ドウェル内の全ての搬送波周波数によって用いられるレンジレートセルサイズが最初に決定される。ドップラー周波数fdはレンジ−半径方向速度、ドット(上に・を付けた)rおよび動作周波数c/λの関数である。到来するレンジレートが以下の正の値を有するという取り決めを用いると、
【0060】
【数20】
【0061】
ドップラー周波数インクリメント(セルサイズ)は以下の式によってレンジレートセルサイズに関係付けられる。
【0062】
【数21】
【0063】
NCIセット内の最大周波数(最小波長)を用いて、NCI内の全ての周波数のために用いられる、Δドットrは以下の式に従って決定される。
【0064】
【数22】
【0065】
ここでΔfdは以下の標準的なドップラー周波数間隔である。
【0066】
【数23】
【0067】
Tはコヒーレント処理間隔(CPI)時間である。
【0068】
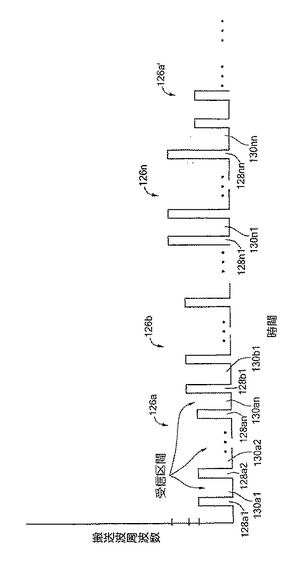
ここで図3を参照すると、1つの例示的な送信されるレーダ信号124が、複数の送信パルス128a1〜128nnと、複数の送信パルス128a1〜128nnのそれぞれに続く複数の対応する受信区間130a1〜130nnとを含む複数の一連のバースト列126a〜126n(全体としてバースト列126と呼ばれる)を含む。一実施形態では、各バースト列は共通のパルス繰返し周波数(PRF)を有し、その周波数でパルス128a1〜128nnが送信される。バースト列126a〜126nはドウェルサイクルとも呼ばれる。たとえば送信パルス128a1〜128anおよび受信区間130a1〜130anを含む各バースト列126aは、CPIと呼ばれる。バースト列126a’は後続のドウェルサイクルの最初のバースト列を表すことに留意されたい。図3に示されるように、周波数ダイバーシティを与えるために、バースト列126aは1つのPRFおよび第1の周波数を有し、バースト列126bは同じPRFおよび第2の周波数を有し、バースト列126nは同じPRFおよび異なる第3の周波数を有する。
【0069】
ここで図3Aを参照すると、図3の類似の参照番号は類似の要素を示しており、ドウェルパターン132が、バースト列126a〜126nにそれぞれ対応する複数の受信区間130のそれぞれに複数のエコー信号138a〜138I(全体として物標エコー信号138と呼ばれる)を含むことができる。エコー信号138は、物体から反射する送信レーダ信号124の各CPIの送信パルス128a1〜128nnと、雑音とを合わせたものよって与えられる。ドウェルパターン132は、バースト列126a〜126nに対応する一連の連続したCPI1〜Nを含む。CPI1は一連の送信される信号128a1〜128anを含み、その各信号に続いて、対応する受信区間130a1〜130anがあり、その中で、物標および他の物体からのエコー信号を受信することができる。たとえば、区間130a2はエコー信号138a〜138lを含み、そのうちのいくつかは物標から反射される複数の物標エコー信号136a〜mであり、いくつかは所定の閾値よりも大きい、他の物体からのエコー信号である。物標から反射されるとき、物標エコー信号136は、物標のレンジの指示を与える。ドウェルパターン132は所定の周波数技法に従って送信される信号を含み、たとえば、その技法では、図3のバースト列126に示されるように、搬送波周波数がCPI間で所定の量だけ変化する。
【0070】
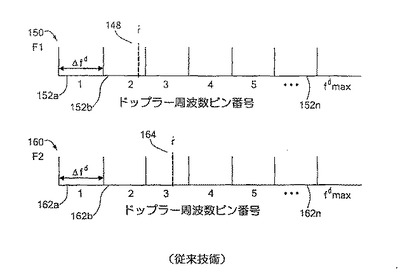
ここで図4を参照すると、第1の搬送波周波数F1を有する第1のCPI150が、ドットrの半径方向速度を有する物標から受信される信号を含む。従来のFFTを用いて第1のCPI150中に受信される信号を処理する結果として、スペクトル成分148(全体としてドップラー148と呼ばれる)が生成される。周波数F1のスペクトルは、一定の周波数間隔で離間して配置される複数のビン152a〜152nに分割される。ここでは、ドップラー148は周波数ビン152b内に現われる。第2の周波数F2を有する第2のCPI160は、ドットrの半径方向速度を有する同じ物標から受信される信号を含む。従来のFFTを用いて第2のCPI160中に受信される信号を処理する結果として、スペクトル成分164(全体としてドップラー164と呼ばれる)が生成される。周波数F2のためのスペクトルは、一定の周波数間隔で離間して配置される複数のビン162a〜162nに分割される。ここでは、ドップラー164は周波数ビン162c内に現われる。物標は相対的に一定の速度を有するが、従来のFFTを用いるスペクトル処理から生じるドップラー信号148および164は異なる周波数ビンの中に入り、付加的な事後処理を用いることなしには、積分することはできない。
【0071】
RF周波数が異なると、物標ドップラー周波数が変化するので、そのようなCPIのスペクトル推定値は従来の処理を用いて積分するのが難しい。結果として、第1のCPI150は、たとえば、周波数ビン#2内のドップラーを有する物標を示し、第2のCPI160は、異なる周波数ビン#3にある物標を示す。物標の速度は一定である場合であっても、スペクトル線はドップラー周波数スケール上の異なる点において現われるであろう。なぜなら、物標半径方向速度は一定であるが、異なる周波数を有するCPIの場合に、速度が周波数スケール内で異なるためである。たとえば、図4では、第1のCPI150の場合には、Δドットr=1.8Δfdであり、第2のCPI160の場合には、Δドットr=2.6Δfdである。
【0072】
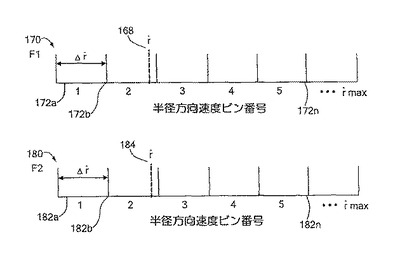
ここで図5を参照すると、第1の周波数F1を有する第1のCPI170が、ドットrの半径方向速度を有する物標から受信される信号を含む。半径方向速度フーリエ変換器122(図1)を用いて第1のCPI170中に受信される信号を処理する結果として、スペクトル成分168(一般にドップラー信号と呼ばれるが、ここでは半径方向速度信号168と呼ばれる)が生成される。周波数F1を有するCPI170のスペクトルは、一定の半径方向速度間隔で離間して配置される複数のビン172a〜172nに分割される。ここでは、半径方向速度信号168は半径方向速度ビン172b内に現われる。第2の周波数F2を有する第2のCPI180が、ドットrの半径方向速度を有する同じ物標から受信される信号を含む。半径方向速度フーリエ変換器122を用いて第2のCPI180中に受信される信号を処理する結果として、スペクトル成分184(全体としてドップラー信号と呼ばれるが、ここでは半径方向速度信号184と呼ばれる)が生成される。周波数F2を有するCPI180のスペクトルは、一定の半径方向速度間隔で離間して配置される複数のビン182a〜182nに分割される。ここでは、半径方向速度信号184は半径方向速度ビン182b内に現われる。物標は相対的に一定の速度を有するので、半径方向速度フーリエ変換122を用いるスペクトル処理から生じる半径方向速度信号148および164は同じ半径方向速度ビンに入り、半径方向速度において揃えられる、即ち位置調整される。
【0073】
そのようなCPIのスペクトル推定値は、半径方向速度フーリエ変換器を用いて積分するのが比較的簡単である。なぜなら、CPI周波数が変化する場合であっても、ドップラー信号が周波数でスケーリングされている(あるいは同じく、半径方向速度において一定の物標速度に正規化されている)ためである。結果として、第1のCPI170は、たとえば、半径方向速度ビン#2において物標を生成し、第2のCPI180も同じ半径方向速度ビン#2において物標を生成する。物標の速度は概ね一定であるので、異なる周波数を有するCPIの周波数スケールとは無関係に、スペクトル線は半径方向速度スケール上の同じ位置において現われるであろう。たとえば、図5では、ドットrはCPI170およびCPI180の両方の場合に同じ半径方向速度ビン内に位置する。こうして、半径方向速度フーリエ変換器は、所望の正規化されたスペクトル推定値を生成する。
【0074】
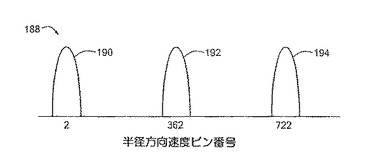
図6A〜図6Cは、半径方向速度フーリエ変換器122(図1)を用いてエコー信号が処理された後の速度曖昧性をなくす1つの方法を示す。ここで図6Aを参照すると、信号188が、半径方向速度周波数ビンに区分される第1のCPIから生じる曖昧な半径方向速度信号190、192および194を含む。ここでは、レーダデータは、式13に類似のFFTを用いて、半径方向速度フーリエ変換器122(図1)によって変換されている。高いPRFによって導入される曖昧性のために、曖昧な半径方向速度信号190および194は、個々のPRFの半径方向速度範囲であるビン内のエイリアスとして現れる。この周波数におけるPRFが360個の半径方向速度ビンをもたらす場合には、その信号はビン2、362および722内に存在する。半径方向速度エイリアスは、1つのPRFを網羅する半径方向速度セルの数だけ間隔をおいて配置される。搬送波周波数が異なると波長が異なるために、信号が半径方向速度に変換されるとき、それらのエイリアスは種々のセル間隔で現われる。
【0075】
ここで図6Bを参照すると、信号198が、半径方向速度周波数ビンに区分される第2のCPIから生じる曖昧な半径方向速度信号200、202および204を含む。ここでは、レーダデータは、式13に類似のFFTを用いて、半径方向速度フーリエ変換器122(図1)によって変換されている。高いPRIによって導入される曖昧性のために、曖昧な半径方向速度信号200および204は、1つのPRFだけ離れているビン内のエイリアスとして現れるが、搬送波周波数の変化に起因して、半径方向速度ビンの数が異なる。半径方向速度ビンのサイズは一定のままである。この例の場合、140個の半径方向速度ビンが1つのPRFに等しいので、信号はビン122、362および602内に現われる。
【0076】
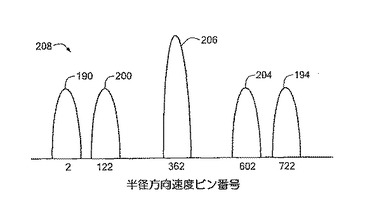
ここで図6Cを参照すると、信号208が、図6Aおよび図6BのCPIからの第1の半径方向速度信号192および第2の半径方向速度信号202の非コヒーレント積分を示しており、結果として、ビン362内に真の半径方向速度206と、ビン2、122、602および722内にそれぞれエイリアス190、200、204および194が生じる。ここでは、ドップラー信号が半径方向速度において正規化されるので、半径方向速度信号は、それぞれ対応するビン内の大きさを加算することにより、非コヒーレントに積分することができる。レーダに対する物標の速度は、半径方向速度ビン内の大きさを直接的に比較することにより検出することができる。ドップラーエイリアスは、ハードウエアまたはソフトウエアにおいて実施される信号処理技法を用いて、自動的に特定され、排除することができることは当業者には理解されよう。
【0077】
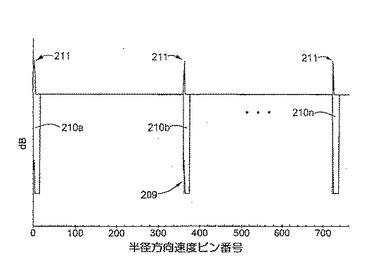
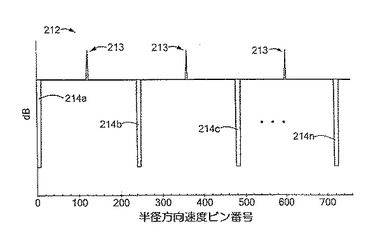
ここで図6D〜図6Fを参照すると、信号209、212および215が、クラッタノッチフィルタでフィルタリングされている半径方向速度信号を示す。図6Dでは、クラッタノッチフィルタは、第1の搬送波周波数の場合に、0および一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ210a〜210n(全体としてノッチ210と呼ばれる)によって示される。ここでは、ノッチ210は曖昧な半径方向速度信号211と揃えられ、フィルタリングされた曖昧な半径方向速度信号209(破線として示される)を与える。図6Eでは、クラッタノッチフィルタは、第2の搬送波周波数の場合に、0およびここでは約240セルだけ離隔して配置される、一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ214a〜214n(全体としてノッチ214と呼ばれる)によって示される。ここでは、ノッチ214は、曖昧な半径方向速度信号213のエコーとは直接的には揃えられず、フィルタリングされた曖昧な半径方向速度信号212を与える。
【0078】
図6Fでは、クラッタノッチフィルタがさらに、第3の搬送波周波数の場合に、0およびここでは約270セルだけ離隔して配置される、一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ217a〜217n(全体としてノッチ217と呼ばれる)によって示される。ここでは、ノッチ217は、曖昧な半径方向速度信号216とは揃えられず、フィルタリングされた曖昧な半径方向速度信号215を与える。クラッタノッチフィルタリングされた信号209、212および215が半径方向速度に変換されるとき、搬送波周波数が異なると波長が異なるために、ノッチ210、214および217は、異なるセル間隔で生じる。搬送波周波数は、クラッタノッチのエイリアスが揃わないように選択される。それゆえ、ノッチ210、214および217は全てのCPIにおいて物標信号を相殺しない。
【0079】
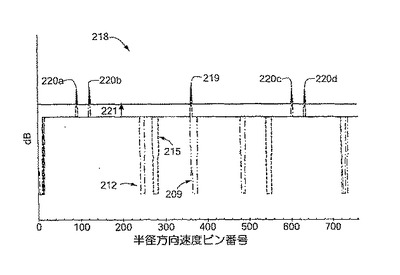
ここで図6Gを参照すると、信号218が、信号209、212および215の非コヒーレント積分を示しており、結果として、ビン362内に真の半径方向速度219と、概ねビン92、124、602および634内にそれぞれエイリアス220a〜220dが生じる。図6Dでは、周期性は360セルであり、物標信号はクラッタノッチのエイリアスによってブロック(阻止)される。図6Eでは、周期性は240セルであり、信号はクラッタノッチのエイリアスによってブロックされない。図6Fでは、周期性は270セルであり、信号は再びクラッタノッチのエイリアス内にはない。クラッタフィルタノッチはエイリアスと同じ周期性を有する。この例では最も高い信号レベルを有する真の信号219のそれぞれの側に複数のエイリアスが存在することができる。ここでは、ドップラー信号は半径方向速度において正規化されるので、クラッタノッチフィルタの効果は全てのCPI内の半径方向速度信号を相殺しない。クラッタノッチエイリアスによる物標エコーの曖昧性は大幅に低減される。クラッタノッチを、負の信号の効果を除去するためにノッチの周囲の領域内の局部的な雑音レベルとして決定することができる雑音レベル221まで満たし、対応する各ビン内の大きさを加算することにより、フィルタ動作後に半径方向速度信号を非コヒーレントに積分することができる。累積的な雑音レベルの増加があることに留意されたい。図6D〜図6Fの場合、明瞭にするために約3つのドップラーゾーンが示されるが、計算される実際の数は、多かれ少なかれ、所望の物標半径方向速度の範囲に基づく。
【0080】
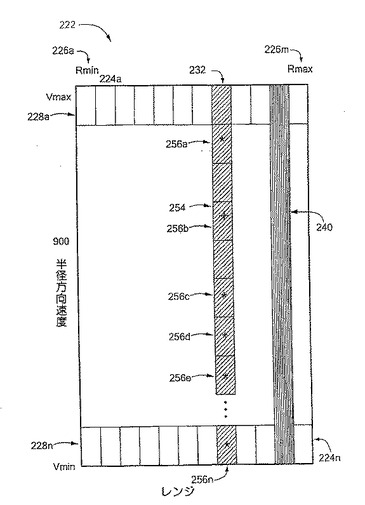
ここで図7を参照すると、1つの例示的なレンジ−半径方向速度マトリックス222が、列226a〜226mおよび行228a〜228nを有するアレイに配列される複数のセル224a〜224nを含む。レンジ−半径方向速度マトリックス222は、上記のように、時間サンプル毎に、到来する信号のパルスにわたってフーリエ変換を実行することによって得られる。結果として生成されるマトリックスにドップラー位相補正が適用される。最後に、レンジ次元のパルス圧縮が実行され、レンジ−半径方向速度マトリックス222が生成される。マトリックス222はさらに、物標位置に対応するレンジにおいて半径方向速度値232の列を含む。半径方向速度値232の列は、曖昧な速度に対応する複数のエイリアス256a〜256nと、真の半径方向速度セル254とを含む。マトリックス222はさらに、雑音カットに対応する半径方向速度値240の列を含む。半径方向速度値232の列は物標を含み、半径方向速度値240の列は物標を含まない。雑音カットに対応する半径方向速度値240の列は、システム内の雑音を表すものである。複数の雑音カット半径方向速度値240を用いて、信号対雑音比が判定される。
【0081】
CPI毎に受信される信号をコヒーレントに積分し、受信された信号の時間領域データを半径方向速度セルに変換した後に、マトリックス222が形成される。マトリックス222は、VminからVmaxまでの速度と、RminからRmaxまでのレンジとを有する、存在が見込まれる物標を含む。既知の一定誤警報率技法(CFAR)を用いて、システムは、所定の閾値よりも大きくなる全てのピーク256a〜256nを検出する。最も大きなピーク254は真の半径方向速度値であると判定される。
【0082】
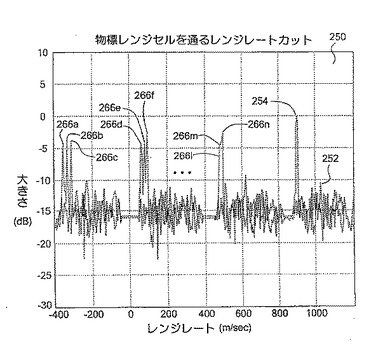
ここで図8を参照すると、類似の参照番号は図7の類似の要素を示しており、処理されたエコー信号250のグラフおよび対応する雑音信号252のグラフが示される。エコーピーク266a〜266nはドップラーエイリアスを表す。エコー信号250は、ピークレンジセルを通して得られた速度カット、たとえば列232(図7)である。一例では、到来する物標が900m/secのレンジ−半径方向速度を有し、NCIにおいて6つの異なる周波数が用いられる。そのシステムは、−400m/secの最小レンジ−半径方向速度と、1200m/secの最大レンジ−半径方向速度とを設定され、400メートル/秒の約4つのドップラーゾーンを網羅する。処理されたエコー信号250の場合に、9000m/secのエコーピーク254において、最も大きな信号対雑音比が生じる。それよりも小さなエコーピーク266a〜266n(星印を付す)はドップラーエイリアスに由来し、ピーク266a〜266nの位置は式16を用いて判定される(図9に関連して後述)。エコーピーク254における曖昧でないレンジ−半径方向速度は物標レポートに含まれる。
【0083】
ここで図9を参照すると、流れ図が、本発明による、種々の搬送波周波数を有する一連のコヒーレント処理間隔(CPI)からの物標エコー信号を処理するためのステップの1つの例示的なシーケンスを示す。図9の流れ図において、長方形の要素は、本明細書では「処理ブロック」(図9の要素300によって代表される)を意味し、コンピュータソフトウエア命令あるいは命令のグループを表す。流れ図内の菱形の要素は、本明細書では「判断ブロック」(図9の要素312によって代表される)を意味し、処理ブロックの動作に影響を及ぼすコンピュータソフトウエア命令あるいは命令のグループを表す。別法では、処理ブロックは、デジタルシグナルプロセッサ回路あるいは特定用途向け集積回路(ASIC)のような機能的に同等の回路によって実行されるステップを表す。流れ図に示されるステップのうちのいくつかはコンピュータソフトウエアを用いて実施することができ、他のステップが異なる方法(たとえば実験的手順)によって実施することができることは当業者には理解されよう。その流れ図は任意の特定のプログラミング言語の構文を表していない。むしろ、その流れ図は、コンピュータソフトウエアを作成し、必要とされる処理を実行するために用いられる機能的な情報を例示する。ループおよび変数の初期化、ならびに時間変数の使用などの数多くのルーチンプログラム要素は図示していないことに留意されたい。本明細書において他に指示がなければ、説明するステップの特定のシーケンスは例示にすぎず、本発明の精神から逸脱することなく変更することができることは当業者には理解されよう。
【0084】
ステップ300では、レーダシステムは、図3あるいは図10の教示による所定の周波数技法に従って送信されるレーダ信号に応答して、エコー信号を受信する。ステップ302では、エコー信号は、当該技術分野において知られているようなローパスフィルタを用いてフィルタリングされる。ステップ304では、フィルタリングされたエコー信号がデジタル化され、メモリバッファに記憶される。
【0085】
ステップ306では、受信された信号は、本明細書において先に説明したような可変周波数スケールを有する離散フーリエ変換を用いて、半径方向速度スケールに変換される。レンジ半径方向速度マトリックスは、レーダにおいて用いられる最も短い波長である(同じく最大の周波数を有する)波長λ0を有する第1の信号で形成される。各エコー信号は、可変周波数スケールを有する離散フーリエ変換のFFTを実施することによって処理され、レンジ半径方向速度マトリックスが与えられる。
【0086】
送信される信号が可変PRFを含む一実施形態では、PRFおよび搬送波周波数に基づいて、受信される信号を周波数スケールで変換するためのさらに別のステップが必要とされるであろう。この実施形態では、変化するPRFは、フーリエ変換の付加的な定数の計算に含まれる。
【0087】
ステップ308では、半径方向速度において位相補正が計算される。半径方向速度位相補正は、パルス圧縮フィルタのレプリカがもはや正確なドップラーに合わせられる必要がなく、圧縮されたパルスの歪みが生じないので、相対的に高いレンジ分解能および信号対雑音比を提供する。ステップ310では、オプションでパルス圧縮を用いて、より短いパルスの分解能を保持しながら、より長い信号パルスを用いて物標において付加的なエネルギーが指向される。半径方向速度空間において積分を実行することにより、拡散を低減し、より良好なサイドローブを与える(すなわち、レンジがまたがることを減らす)ことにより、エネルギーが節約される。
【0088】
ステップ312では、処理すべきCPIが他にあるか否かが判定される。さらにCPIがある場合には、処理がステップ300において再開され、そうでない場合には、処理はステップ314で続けられる。ステップ314では、変換されたエコー信号はそれぞれ、ステップ306の変換によって半径方向速度空間において正規化されたレンジ−半径方向速度マトリックスにおいて処理された信号の大きさ(あるいは、用いられることになる一定誤警報率弁別器によっては、大きさの二乗)の値を加算することにより、非コヒーレントに積分される。
【0089】
ステップ316では、一定誤警報率技法を用いて、半径方向速度空間において真の物標エコーおよびエイリアスの物標エコーが検出される。ステップ318では、一実施形態では、以下の式を適用することにより、ドップラーエイリアスが除去される。
【0090】
【数24】
【0091】
ここで、Δドットrtrueはそのレンジにおける最も高い信号対雑音比を有するエコーであり、ηは正負いずれかの整数である。
送信される信号が可変PRFを含む実施形態では、レンジ次元において任意の起こり得る曖昧性を除去するためのさらに別のステップが必要とされるであろう。ステップ320では、エコー信号が既知の技法を用いて処理され、ステップ322では、物標レポートが計算される。
【0092】
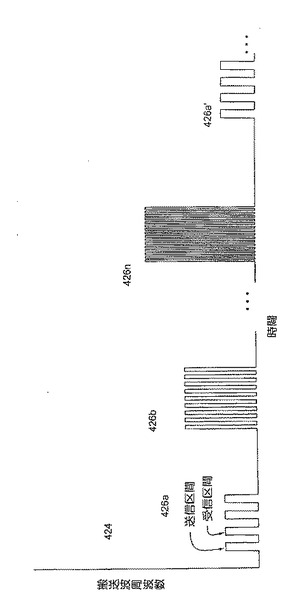
ここで図10を参照すると、別の送信されるレーダ信号424が、複数の送信パルスと、その複数の送信パルスのそれぞれに続く複数の対応する受信区間とを含む、複数の一連のバースト列426a〜426n(全体としてバースト列426と呼ばれる)を含む。一実施形態では、各バースト列は異なるパルス繰返し周波数(PRF)と、パルス128a1〜128nnが送信される異なる搬送波周波数とを有する。この実施形態におけるパルス圧縮のための処理は、式2および3あるいは式12および13のフーリエ変換を用いて、そのマトリックス内に同じ数のレンジサンプルを与え、変化するPRFは、DFTの付加的な定数の計算に含まれる。送信される信号はさらに、周波数変調(FM)チャープあるいは2相位相変調された波形のいずれかを含むことができる。
【0093】
ここで、上記の技法は、複数のCPIを積分することを利用して、より高い感度を達成し、広い(CPI当たり数百MHz)周波数ダイバーシティを利用して、物標断面積を拡大し、RFマルチパス干渉を軽減可能であることは理解される。さらに、そのような技法は非コヒーレント積分を提供し、信号ドップラー周波数を揃えるためにレーダエコー信号の多大な事後処理を必要とすることなく、信号の検出可能性を高める。
【0094】
本発明がレーダへの応用形態には限定されないこと、および受信機、たとえば通信用受信機に接続されるシグナルプロセッサが、可変周波数スケールを有する離散フーリエ変換を用いて、受信される信号を処理することができることがさらに理解される。そのような装置は、第1のコヒーレント処理間隔を有する第1の一連のパルスと、異なる搬送波周波数を有し、第2のコヒーレント処理間隔を有する第2の一連のパルスとを有する信号を受信機に送信する送信機を含み、その受信機は送信される信号を受信し、積分するように構成されるであろう。
【0095】
本明細書に記載される全ての刊行物および引用文献は、全体として参照により本明細書に援用される。
【0096】
本発明の好ましい実施形態を説明してきたが、ここで、それらの概念を組み込む他の実施形態を用いることができることが当業者には明らかであろう。本発明とともに、他の送信されるレーダ信号を用いて、物標レンジおよび速度を検出することができることは当業者には理解されよう。それゆえ、これらの実施形態は開示される実施形態に限定されるべきではなく、特許請求の範囲の精神およびその範囲によってのみ制限されるべきであると考える。
【図面の簡単な説明】
【0097】
【図1】本発明によるレーダシステムのブロック図である。
【図2】本発明による、周期的な曖昧な速度を処理されたエコー信号を示す1組の曲線のグラフである。
【図3】周波数ダイバーシティを有する複数のCPIのための送信信号、および対応する受信区間を示す、1つの例示的な送信されるレーダ信号の図である。
【図3A】送信される信号および受信されるエコー信号を示す一連のCPIの図である。
【図4】種々の搬送波周波数の場合の1組の従来技術の周波数ビンを示す図である。
【図5】本発明による、種々の搬送波周波数の場合の1組の一定の半径方向速度周波数ビンを示す図である。
【図6A】本発明による、2つの異なる周波数における半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6B】本発明による、2つの異なる周波数における半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6C】図6Aおよび図6Bのドップラー信号の非コヒーレント積分後の曖昧な速度のドップラー信号のグラフである。
【図6D】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6E】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6F】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6G】図6D〜図6Fのクラッタノッチフィルタで処理されたドップラー信号の非コヒーレント積分から生じる曖昧な速度のドップラー信号のグラフである。
【図7】本発明による1つの例示的なレンジ−半径方向速度マトリックスを示す図である。
【図8】本発明に従って処理されたエコー信号のグラフ、および対応する雑音のグラフである。
【図9】本発明による、可変周波数スケールの離散フーリエ変換を用いて、受信されたパルスドップラーレーダ信号を処理するためのステップを示す流れ図である。
【図10】周波数ダイバーシティを有する複数のCPIおよび複数のPRFの場合の送信信号、および対応する受信区間を示す、図3の信号の別の例示的な送信されるレーダ信号の図である。
【発明の詳細な説明】
【0001】
発明の分野
本発明は概括的にはレーダ信号処理に関し、より詳細には目標(物標)のレンジ(距離)および/または半径方向速度を判定するための装置および方法に関する。
発明の背景
当該技術分野において知られているように、物体のレンジおよび/または相対速度(すなわちドップラー速度)を判定するために、パルスドップラーレーダシステムのようなレーダシステムが用いられる。レーダパルスは、パルス繰返し周波数(PRF)と呼ばれる速度で送信される。連続するパルス間の時間間隔はパルス繰返し間隔(PRI)と呼ばれる。パルス送信後の所定の時間中に、レーダシステムによって、レーダ反射(エコー)信号がサンプリング、すなわちゲーティングされる。すなわち、パルス送信と、サンプルが得られた時間との間の時間差に基づいて、個々のサンプルは、レーダシステムと、サンプリングされるエコーを生成する物体との間のレンジ、すなわち距離に対応する。その過程はレンジゲーティングと呼ばれ、サンプルが得られる各時間は、サンプルが得られる時間に対応するレンジにある物体によって生成されるエコーのレンジセル、すなわちレンジ(距離)ゲートを表す。
【0002】
レーダシステムと物体との間に相対速度(すなわちドップラー速度)がある応用形態では、その物体を追跡するために、パルス送信後にレーダエコーサンプルがサンプリングされる時間が、レーダシステムと物体との間の相対速度に応じて変化する。したがって、物体がレーダシステムから離れる方向に移動している場合には、レーザパルスが送信された時間に対する、レーダエコーがサンプリングされる時間が、レーダシステムと物体との間の相対速度、すなわちドップラー速度に比例する割合で、レーダパルス毎に長くならなければならない。同じように、物体がレーダシステムに向かって移動している場合には、レーザパルスが送信された時間に対する、レーダエコーがサンプリングされる時間が、レーダシステムと物体との間のドップラー速度に比例する割合で、レーダパルス毎に短くならなければならない。
【0003】
物体のドップラー速度を判定するために、複数の送信されたレーダパルスからのレーダエコーが処理される。より詳細には、複数の連続して送信されたレーダパルスからの各組のレーダエコーはドウェルと呼ばれる。レーダシステムは複数の連続したドウェルを生成する。ドウェル毎に、レーダシステムは、複数の連続したレンジゲートのそれぞれにおいて、複数のドップラー周波数ウインドウ(窓)を判定する。
【0004】
言い換えると、ドウェル毎に、レーダシステムは、複数の連続したレンジゲートのそれぞれにおいて複数のドップラー周波数窓を判定し、ドップラー行列(マトリックス)を与える。N個のパルスが存在する場合には、N個の周波数窓(あるいはビン)が存在する。レンジゲートの数は、各PRIから得られる入力サンプルの数に対応する。M個の入力サンプルがN個のPRIそれぞれから抽出される場合には、M回の離散フーリエ変換(DFT)が実行され、M個のレンジおよびN個の周波数窓からなるマトリックスが生成される。
【0005】
ドップラー速度の分解能を細かくすると、一般的にドウェル当たり多数のレーダエコー(すなわち、相対的な長いデータ収集時間)が必要になる。ドップラー速度が相対的に速い物体の場合、このデータ収集時間は、物体からレーダシステムへのレンジが大きな変化を受ける可能性がある時間間隔になる。レンジ精度がドウェルにわたる物体の動きよりも劣る場合には、各ドウェルの中央に物体へのレンジを保持し、それによりレーダシステムが最大の信号対雑音比で物体へのレンジを追跡できるようにするために、或るタイプの動的なレンジゲート調整(すなわちレンジゲート位置決めシステム)が必要とされる。
【0006】
種々のシステムは、レンジ「変動(ウォーキング)」補償あるいは速度補助技法を用いて、ドウェル中にレンジゲートを移動させ、物体がレンジゲートの「窓」(すなわち持続時間)を通過するのを防止している。たとえば、本発明と同じ譲受人に譲渡され、参照により本明細書に援用される、1999年8月24日に発行された「Radar System」と題する米国特許第5,943,003号は、物標のレンジおよび/または相対速度を判定するための1つの改善された技法を教示する。パルス式レーダの応用形態では、多くの場合に、ドウェル積分および広い周波数ダイバーシティを有する無線周波数信号を用いて、すなわち広い周波数レンジにわたって変化する搬送波周波数を有するレーダ信号を用いて、物標のレンジおよび半径方向速度を判定することが望ましい。また、パルス圧縮技法を用いて、より短いパルスの分解能を保持しながら、より長い信号パルスを用いて物標に付加的なエネルギーを指向させることも望ましい。レーダ信号は一連のパルスとして送信され、これらのパルスはそれぞれ、エコー信号を受信するために割り当てられる時間間隔とともに、コヒーレント処理間隔(CPI)を形成する。各CPIは異なる搬送波周波数を用いることができ、ドウェル周期あるいはドウェルサイクルはCPIのシーケンス(列)として示される。各CPI中に受信される信号の複数のDFTが、物標の信号対干渉比を高めるための手段として一般的に用いられる。しかしながら、その変換は、数学的に積分するのが難しい。CPI間の無線周波数(RF)シフトによって、物標のドップラー周波数が変化する。処理中に、受信された信号は周波数によって区分され、複数のフィルタビンに入れられて、フィルタビン番号を割り当てられる。周波数ダイバーシティ(すなわち、パルス列の搬送波周波数を変更すること)を用いて、従来の処理技法で物標を検出するとき、異なる搬送波周波数に起因するドップラー周波数の変動はビンシフトと呼ばれる。
【0007】
パルス式ドップラーレーダの場合、ドップラービンが周波数で揃えられ(位置調整され)、測定されることになるパラメータ、たとえば到来速度に関しては揃えられないので、種々の搬送波周波数のレンジ−ドップラーマトリックスを非コヒーレントに積分するのは難しい。それゆえ、種々のドップラービン内の値が非コヒーレントに加算されることになる方法を判定するためのアルゴリズムが必要とされる。この揃え方の問題は一般的に、「ビンシフト」問題と呼ばれる。さらに、ドウェル時間およびレーダパルス繰返し周波数(PRF)に応じて、ドップラー応答は周期的である。この結果として、高いPRFを用いるときに真のドップラーとともにエイリアスが測定されるので、物標のためのドップラーが曖昧になる可能性がある。レーダ信号を処理する際に時として、ドップラー位相補正を追加することが望ましいが、曖昧なドップラー信号が正確にわからない場合、位相補正が不正確になり、それによりレンジレートおよびレンジ誤差を生じる可能性がある。従来のシステムは非コヒーレント積分(NCI)を実施するために、ビンシフト問題を補正するためのポスト(事後)処理技法を必要とする。事後処理をしても物標拡散のような他の問題はそのままであり、従来のシステムでは、パルス圧縮のために必要とされる複雑な位相補正技法が存在する。
【0008】
それゆえ、信号ドップラー周波数を揃える(位置調整する)ためにレーダエコー信号の多大な事後処理を必要とすることなく、非コヒーレント積分による信号の検出可能性を高めることが望ましいであろう。
発明の概要
本発明によれば、パルスドップラーレーダ信号を処理して物標を検出するための方法は、レーダシステムから、所定の可変周波数を有するレーダ信号を送信すること、或る周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信すること、および可変周波数スケールを有するフーリエ変換を用いて、物標エコー信号を変換することを含む。そのような技法を用いる場合、信号ドップラー周波数を位置調整する(揃える)ためにレーダエコー信号の多大な事後処理を必要とすることなく、非コヒーレント積分による信号の検出可能性が高められる。本発明の技法は、複数のドウェルを積分することを利用して、より高い感度を達成し、周波数ダイバーシティを用いて、物標断面積を拡大し、RFマルチパス干渉を軽減する。この技法は、DFTの式を実効的に変更することにより、ビンシフト問題を解決する。式を変更する結果として、信号のスペクトル成分の「物標速度」正規化バージョンが生成されるので、用いられるRF搬送波周波数毎に、同じDFTビン内で物標エコーが揃えられる。
【0009】
本発明のさらに別の態様によれば、その技法はさらに、非コヒーレント積分のために半径方向速度マトリックスを揃えること、ドップラーエイリアス(偽信号)から生じる複数の検出を特定すること、および複数の検出からドップラーエイリアスを除去することを含む。このような技法を用いることによって、比較的高いPRFを用いて、システム内の速度の曖昧性が解決される。変更された技法は、複数の検出をフーリエ変換して、任意の所望の下限および上限に対して設定されることができる半径方向速度空間を生成する。半径方向速度は、レンジ/ドップラーマトリックス内に、種々の搬送波周波数の場合に種々の周期で周期的に現われる。正確なレンジレートにおいてのみ、受信された信号が揃えられるであろう。ドップラーエイリアスを生じる任意の検出が判定され、検出リストから除外される。最小および最大の両方の所望のレンジレートの範囲はこの過程では制限されないので、曖昧でないレンジレートゾーンは処理時間によってのみ制限される。それゆえ、正確なドップラーを得るために、任意のドップラー位相補正を行うことができ、結果として生成されるレンジおよび半径方向速度誤差が低減される。
【0010】
一実施形態では、変更されたDFT技法は、時間サンプルを、ドップラー周波数空間ではなく、半径方向速度空間に変換する。半径方向速度マトリックスによって結果として生成されるレンジは、非コヒーレント積分のために予め揃えられる。半径方向速度の限度は、ドウェルの時間、あるいはコヒーレント処理間隔(CPI)内のパルスの数によっては制限されない。半径方向速度の曖昧性の分解能が直接的に判定される。さらに、適用される任意のドップラー位相補正が正確な曖昧でないドップラー領域において適用され、起こり得るレンジおよび半径方向速度誤差が低減される。
発明の詳細な説明
本発明の上記の特徴、および本発明自体は、図面を参照する以下の説明から、より十分に理解することができるであろう。
【0011】
本発明の詳細な説明を提供する前に、その説明において用いられる用語のうちのいくつかを定義することが有用である。本明細書において用いられるとき、コヒーレント処理間隔(CPI)はレーダシステムが所定の搬送波周波数において送信される一連のパルスを送信するための時間、およびそのパルスを反射する物体からの対応するエコー信号を受信するための時間である。本明細書において用いられるとき、非コヒーレント積分(NCI)は、いくつかのCPIそれぞれに含まれるエコー信号の積分を用いて合成する処理を指している。NCIによって合成される信号は、大きさの値のみを含み、位相情報を含まない。所定のパルス繰返し周波数は、それぞれ一対のパルス間のパルス繰返し間隔(PRI)と同じであると言うことができる。ドウェルは、それぞれが異なる搬送波周波数を有する複数のCPIがレーダシステムによって送信および受信される所定の時間である。
【0012】
本明細書において用いられるとき、「物標ドップラー信号」は、フィルタバンク、あるいは等価的に離散フーリエ変換(DFT)を用いて物標からのエコー信号を処理する結果としてのレンジ−ドップラーマトリックス内のドップラー値あるいは要素を指している。本発明の変更されたDFTで処理されるとき、用語「物標半径方向速度信号」は、レンジ−半径方向速度マトリックス内の半径方向速度値を指している。本明細書において用いられるとき、「物標信号」は、フィルタバンク、あるいは同じく離散フーリエ変換(DFT)を用いて物標からのエコー信号を処理することから生じる1組の要素内の1つの区別できる要素を指している。
【0013】
ここで図1を参照すると、1つの例示的なパルスドップラーレーダシステム100が、アンテナ110と、それに接続される送信機112および受信機114とを備える。システム100はさらに、受信機114に接続されるローパスフィルタ116と、ローパスフィルタ116に接続されるアナログ−デジタルコンバータ118と、アナログ−デジタルコンバータ118に接続されるシグナルプロセッサ120とを備える。シグナルプロセッサ120は半径方向速度高速フーリエ変換(FFT)変換器122を含む。アンテナ110は、既知の技術を用いるサーキュレータ111によって送信機112あるいは受信機114に選択的に結合される。サーキュレータ111の1つの目的は、送信機112と受信機114との直接的結合を防止することである。
【0014】
半径方向速度FFT変換器122は、従来のドップラー周波数FFT変換器の代わりになるものであり、後に説明するように動作する。一実施形態では、半径方向速度FFT変換器122は、以下の式によって与えられる変更されたDFTを提供する。
【0015】
【数4】
【0016】
ここで、
di=λ0/λi
であり、
λ0は所定の波長であり、
λiはCPI#iを含むパルスの波長であり、
Nは1つのCPI内で処理されるパルスの数であり、
kは周波数インクリメント指数(添字)であり、
pはデジタル化された受信信号の時間サンプルを表す添字であり、
Xp(k)はk*PRF/Nの周波数ビン内の信号エコーエネルギーの量であり、
xp(n)は、時間サンプルp、PRIiにおける時間領域(ドメイン)受信信号である。
式1において、周波数インクリメントを表す添字kは、1つのCPI内で処理されるパルスの数によって制限され、ここではNに等しい。
【0017】
動作時に、所望の送信周波数が選択される。波長λ0は最も高い周波数に割り当てられる。CPIのパルス間隔はこの最も高い周波数で送信され、システム100は通常、最初にレンジ内で、その後、式1のFFT(すなわちdi=1)でデータを処理する。波長λiを有する次の周波数は以下の比を形成する。
【0018】
di=λ0/λi
第2のCPIが処理され、新たな1組のレンジ−半径方向速度セルが導出される。可変波長スケーリングファクタdiは、波長と周波数との間が逆の関係であるので、対応する周波数スケーリングファクタと等価であることが理解される。
【0019】
この方法は、まさに処理中に、データを正規化するという利点を有する。データ事後処理(ソートルーチンおよび補間ルーチンで必要とされるような)は不要である。この実施形態では、物標ドップラー周波数がレーダPRFよりも大きい場合には、変換器出力はもはや揃えられないことに留意されたい。
【0020】
変換をさらに改良することにより、複数のドップラーサイクルが与えられ、曖昧な速度の問題が取り扱われる。以下の変換は、次数のMの曖昧な速度で任意の物標を正規化する。
【0021】
【数5】
【0022】
ここで、di=λ0/λiであり、
Mは物標速度曖昧性の次数(任意の正または負の整数)であり、kの最大値および最小値に限界があるために、Mが用いられる。Mは以下の式に従って、図2に関連して説明するような整数値をとる。
【0023】
【数6】
【0024】
ここで、NはCPI当たりのパルス数であり、
kは周波数インクリメントを表す添字であり、
nはPRIを表す添字であり、
xp(n)は、時間nにおける時間領域受信信号、すなわちCPIiのためのPRIである。
項diの下付き文字iは異なるドウェルに用いられることに留意されたい。
ここで図2を参照すると、複数の曲線群352a、352b〜352mを含む図350が、式2の変換が任意の物標ドップラーの場合の変換出力を如何に揃えるかを示す。それぞれ異なる波長λiを有する複数のレーダデータドウェルが実行されるとき、式1の変換は、選択されたレーダPRF未満のドップラー周波数を有する物標速度を正規化する。式1の変換では、λ0はレーダにおいて用いられる最も短い波長である。レーダシステムのシステム要件に応じて、λ0のための種々の選択があることは当業者には理解されよう。
【0025】
任意の速度vを有する物標を表す入力シーケンス(列)は以下のようにモデル化することができる。
【0026】
【数7】
【0027】
T≡レーダパルス繰返し間隔
入力信号のこのモデルが式1の基本変換に代入されるとき、その結果は以下のようになる。
【0028】
【数8】
【0029】
以下の式が成り立つときに、Xi(k)が主なピークを有することが明らかになる。
【0030】
【数9】
【0031】
M≡任意の正または負の整数
この式は以下の式によって表すことができる。
【0032】
【数10】
【0033】
この式はフィルタ番号kを示し、フィルタ番号kは任意の速度vの場合の最大信号エネルギーを含むであろう。それは一群の直線の式であり、物標速度vだけでなく、レーダ波長λiにも依存し、後に示されることになる整数Mは物標速度曖昧性の次数であることに留意されたい。di=λ0/λiであることを思い起こすと、その式は以下のように簡略化される。
【0034】
【数11】
【0035】
この形では、どのレーダ波長が用いられるかとは無関係に、直線の勾配は一定になっている。
【0036】
図2の例では、以下の3つの異なる波長を有する3つのレーダドウェルが用いられる。
【0037】
λ0=.03メートル(10GHz)
λ1=.0333メートル(9GHz)
λ2=.0375メートル(8GHz)
これらの異なる波長およびMのいくつかの値の場合の曲線群が図2に示される。各式は以下の領域においてのみ有効である。
【0038】
0≦ k≦N−1
M=0の場合の曲線群は1つの曲線に収束する。有効性の領域は0mpsからv=λ0/2T≡v0に及ぶ。それゆえ、変更された以下に示す変換は第1の速度曖昧性v0(遅い物標速度を有する領域I)内の速度で物標を正規化する。
【0039】
【数12】
【0040】
M=1の場合、第2の曲線群が存在する。今度は、それらの曲線は波長λi毎に異なる。M=1の場合の3つの曲線は平行であるが、それぞれ以下の点において別々に縦座標と交差する。
【0041】
−MN(λi/λ0)
物標の速度が領域II、v0≦ v≦ 2v0内に存在する場合には、ピークエネルギー物標フィルタ(すなわちビン)の数はレーダドウェル毎に変化する。結果として、1つの物標を積分するために、これらの信号変換を単に加算することができなくなる。
【0042】
これらの信号変換を積分するために、M=1の場合に、それらの曲線は一致するようにシフトされなければならない。M=1の曲線群を検査することにより、各曲線が量MN[(1/di)−1]だけ上方にシフトされる必要があることは理解されよう。kの元の式は以下のとおりである。
【0043】
【数13】
【0044】
シフトされる量が加算されて以下の式が与えられる。
【0045】
【数14】
【0046】
この式は、di/Nを乗算し、式3に示されるMを与えるように移項することにより、最大値、すなわち検出毎の信号の最大値を得るために、元の位相信号の式、すなわち式10に類似するように変換される。項e−2πjMdi(DFTフェーザ(phasor)とも呼ばれる)が、入力列の各サンプルにかけられる重み付け関数として、その変換に加えられる。それゆえ、式1および式2の変換は、DFTフェーザが速度領域の種々の領域において揃えられるように受信信号に位相シフト重み付け関数を適用することにより、次数Mの曖昧な速度で任意の物標を正規化する。
【0047】
別の一実施形態では、半径方向速度FFT変換器122は以下の式から導出されるDFTを与える。
【0048】
【数15】
【0049】
式12はCPIの時間Tおよびドップラー位相インクリメント値Δfdを含む。TΔfdmax=1という標準的な条件が式3に与えられ、Δfd間の関係が示され、それは以下の式を与える。
【0050】
【数16】
【0051】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
mはCPIを表す添字であり、
NはCPI内のパルス数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Ψp,n,mは周波数領域の関数であり、時間を表す添字p、周波数を表す添字kおよびCPIを表す添字mを有し、
Ψp,n,mは時間領域受信信号であり、時間サンプルを表す添字p、パルスを表す添字n、CPIを表す添字mを有する。
【0052】
式12および式13では、所望の半径方向速度レンジに基づいて、kの限度が規定されるので、式2において用いられるような項Mは不要である。kの限度、すなわちkminおよびkmaxは式14および式15において定義される。その際、NCI内の周波数毎のkの最小値および最大値は周波数に依存しない式によって決定される。
【0053】
【数17】
【0054】
【数18】
【0055】
ここで、式12および式13は、式1および式2の表現とは異なる表記法を用いることに留意されたい。式12および式13では、ΨがXの代わりに用いられる。式12および式13は、変数の代わりの下付き文字として、CPIを表す添字および時間あるいは周波数を表す添字の両方を用いる。標準的なDFTに対する本発明による変更を表し、かつ実施するためのいくつかの等価な方法が存在することは当業者には理解されよう。式1および式2を用いる実施形態、ならびに式12および式13を用いる実施形態は、可変周波数スケールを有する離散フーリエ変換を用いることに関する2つの例にすぎない。
【0056】
このFFT内の以下の項は、それぞれ異なる搬送波周波数において得られる、複数のレーダCPIの場合のドップラー周波数正規化を与える。
【0057】
【数19】
【0058】
その正規化は、結果として生成されるレーダデータの正規化および「積分」を簡単にする。
【0059】
ドウェル内の全ての搬送波周波数によって用いられるレンジレートセルサイズが最初に決定される。ドップラー周波数fdはレンジ−半径方向速度、ドット(上に・を付けた)rおよび動作周波数c/λの関数である。到来するレンジレートが以下の正の値を有するという取り決めを用いると、
【0060】
【数20】
【0061】
ドップラー周波数インクリメント(セルサイズ)は以下の式によってレンジレートセルサイズに関係付けられる。
【0062】
【数21】
【0063】
NCIセット内の最大周波数(最小波長)を用いて、NCI内の全ての周波数のために用いられる、Δドットrは以下の式に従って決定される。
【0064】
【数22】
【0065】
ここでΔfdは以下の標準的なドップラー周波数間隔である。
【0066】
【数23】
【0067】
Tはコヒーレント処理間隔(CPI)時間である。
【0068】
ここで図3を参照すると、1つの例示的な送信されるレーダ信号124が、複数の送信パルス128a1〜128nnと、複数の送信パルス128a1〜128nnのそれぞれに続く複数の対応する受信区間130a1〜130nnとを含む複数の一連のバースト列126a〜126n(全体としてバースト列126と呼ばれる)を含む。一実施形態では、各バースト列は共通のパルス繰返し周波数(PRF)を有し、その周波数でパルス128a1〜128nnが送信される。バースト列126a〜126nはドウェルサイクルとも呼ばれる。たとえば送信パルス128a1〜128anおよび受信区間130a1〜130anを含む各バースト列126aは、CPIと呼ばれる。バースト列126a’は後続のドウェルサイクルの最初のバースト列を表すことに留意されたい。図3に示されるように、周波数ダイバーシティを与えるために、バースト列126aは1つのPRFおよび第1の周波数を有し、バースト列126bは同じPRFおよび第2の周波数を有し、バースト列126nは同じPRFおよび異なる第3の周波数を有する。
【0069】
ここで図3Aを参照すると、図3の類似の参照番号は類似の要素を示しており、ドウェルパターン132が、バースト列126a〜126nにそれぞれ対応する複数の受信区間130のそれぞれに複数のエコー信号138a〜138I(全体として物標エコー信号138と呼ばれる)を含むことができる。エコー信号138は、物体から反射する送信レーダ信号124の各CPIの送信パルス128a1〜128nnと、雑音とを合わせたものよって与えられる。ドウェルパターン132は、バースト列126a〜126nに対応する一連の連続したCPI1〜Nを含む。CPI1は一連の送信される信号128a1〜128anを含み、その各信号に続いて、対応する受信区間130a1〜130anがあり、その中で、物標および他の物体からのエコー信号を受信することができる。たとえば、区間130a2はエコー信号138a〜138lを含み、そのうちのいくつかは物標から反射される複数の物標エコー信号136a〜mであり、いくつかは所定の閾値よりも大きい、他の物体からのエコー信号である。物標から反射されるとき、物標エコー信号136は、物標のレンジの指示を与える。ドウェルパターン132は所定の周波数技法に従って送信される信号を含み、たとえば、その技法では、図3のバースト列126に示されるように、搬送波周波数がCPI間で所定の量だけ変化する。
【0070】
ここで図4を参照すると、第1の搬送波周波数F1を有する第1のCPI150が、ドットrの半径方向速度を有する物標から受信される信号を含む。従来のFFTを用いて第1のCPI150中に受信される信号を処理する結果として、スペクトル成分148(全体としてドップラー148と呼ばれる)が生成される。周波数F1のスペクトルは、一定の周波数間隔で離間して配置される複数のビン152a〜152nに分割される。ここでは、ドップラー148は周波数ビン152b内に現われる。第2の周波数F2を有する第2のCPI160は、ドットrの半径方向速度を有する同じ物標から受信される信号を含む。従来のFFTを用いて第2のCPI160中に受信される信号を処理する結果として、スペクトル成分164(全体としてドップラー164と呼ばれる)が生成される。周波数F2のためのスペクトルは、一定の周波数間隔で離間して配置される複数のビン162a〜162nに分割される。ここでは、ドップラー164は周波数ビン162c内に現われる。物標は相対的に一定の速度を有するが、従来のFFTを用いるスペクトル処理から生じるドップラー信号148および164は異なる周波数ビンの中に入り、付加的な事後処理を用いることなしには、積分することはできない。
【0071】
RF周波数が異なると、物標ドップラー周波数が変化するので、そのようなCPIのスペクトル推定値は従来の処理を用いて積分するのが難しい。結果として、第1のCPI150は、たとえば、周波数ビン#2内のドップラーを有する物標を示し、第2のCPI160は、異なる周波数ビン#3にある物標を示す。物標の速度は一定である場合であっても、スペクトル線はドップラー周波数スケール上の異なる点において現われるであろう。なぜなら、物標半径方向速度は一定であるが、異なる周波数を有するCPIの場合に、速度が周波数スケール内で異なるためである。たとえば、図4では、第1のCPI150の場合には、Δドットr=1.8Δfdであり、第2のCPI160の場合には、Δドットr=2.6Δfdである。
【0072】
ここで図5を参照すると、第1の周波数F1を有する第1のCPI170が、ドットrの半径方向速度を有する物標から受信される信号を含む。半径方向速度フーリエ変換器122(図1)を用いて第1のCPI170中に受信される信号を処理する結果として、スペクトル成分168(一般にドップラー信号と呼ばれるが、ここでは半径方向速度信号168と呼ばれる)が生成される。周波数F1を有するCPI170のスペクトルは、一定の半径方向速度間隔で離間して配置される複数のビン172a〜172nに分割される。ここでは、半径方向速度信号168は半径方向速度ビン172b内に現われる。第2の周波数F2を有する第2のCPI180が、ドットrの半径方向速度を有する同じ物標から受信される信号を含む。半径方向速度フーリエ変換器122を用いて第2のCPI180中に受信される信号を処理する結果として、スペクトル成分184(全体としてドップラー信号と呼ばれるが、ここでは半径方向速度信号184と呼ばれる)が生成される。周波数F2を有するCPI180のスペクトルは、一定の半径方向速度間隔で離間して配置される複数のビン182a〜182nに分割される。ここでは、半径方向速度信号184は半径方向速度ビン182b内に現われる。物標は相対的に一定の速度を有するので、半径方向速度フーリエ変換122を用いるスペクトル処理から生じる半径方向速度信号148および164は同じ半径方向速度ビンに入り、半径方向速度において揃えられる、即ち位置調整される。
【0073】
そのようなCPIのスペクトル推定値は、半径方向速度フーリエ変換器を用いて積分するのが比較的簡単である。なぜなら、CPI周波数が変化する場合であっても、ドップラー信号が周波数でスケーリングされている(あるいは同じく、半径方向速度において一定の物標速度に正規化されている)ためである。結果として、第1のCPI170は、たとえば、半径方向速度ビン#2において物標を生成し、第2のCPI180も同じ半径方向速度ビン#2において物標を生成する。物標の速度は概ね一定であるので、異なる周波数を有するCPIの周波数スケールとは無関係に、スペクトル線は半径方向速度スケール上の同じ位置において現われるであろう。たとえば、図5では、ドットrはCPI170およびCPI180の両方の場合に同じ半径方向速度ビン内に位置する。こうして、半径方向速度フーリエ変換器は、所望の正規化されたスペクトル推定値を生成する。
【0074】
図6A〜図6Cは、半径方向速度フーリエ変換器122(図1)を用いてエコー信号が処理された後の速度曖昧性をなくす1つの方法を示す。ここで図6Aを参照すると、信号188が、半径方向速度周波数ビンに区分される第1のCPIから生じる曖昧な半径方向速度信号190、192および194を含む。ここでは、レーダデータは、式13に類似のFFTを用いて、半径方向速度フーリエ変換器122(図1)によって変換されている。高いPRFによって導入される曖昧性のために、曖昧な半径方向速度信号190および194は、個々のPRFの半径方向速度範囲であるビン内のエイリアスとして現れる。この周波数におけるPRFが360個の半径方向速度ビンをもたらす場合には、その信号はビン2、362および722内に存在する。半径方向速度エイリアスは、1つのPRFを網羅する半径方向速度セルの数だけ間隔をおいて配置される。搬送波周波数が異なると波長が異なるために、信号が半径方向速度に変換されるとき、それらのエイリアスは種々のセル間隔で現われる。
【0075】
ここで図6Bを参照すると、信号198が、半径方向速度周波数ビンに区分される第2のCPIから生じる曖昧な半径方向速度信号200、202および204を含む。ここでは、レーダデータは、式13に類似のFFTを用いて、半径方向速度フーリエ変換器122(図1)によって変換されている。高いPRIによって導入される曖昧性のために、曖昧な半径方向速度信号200および204は、1つのPRFだけ離れているビン内のエイリアスとして現れるが、搬送波周波数の変化に起因して、半径方向速度ビンの数が異なる。半径方向速度ビンのサイズは一定のままである。この例の場合、140個の半径方向速度ビンが1つのPRFに等しいので、信号はビン122、362および602内に現われる。
【0076】
ここで図6Cを参照すると、信号208が、図6Aおよび図6BのCPIからの第1の半径方向速度信号192および第2の半径方向速度信号202の非コヒーレント積分を示しており、結果として、ビン362内に真の半径方向速度206と、ビン2、122、602および722内にそれぞれエイリアス190、200、204および194が生じる。ここでは、ドップラー信号が半径方向速度において正規化されるので、半径方向速度信号は、それぞれ対応するビン内の大きさを加算することにより、非コヒーレントに積分することができる。レーダに対する物標の速度は、半径方向速度ビン内の大きさを直接的に比較することにより検出することができる。ドップラーエイリアスは、ハードウエアまたはソフトウエアにおいて実施される信号処理技法を用いて、自動的に特定され、排除することができることは当業者には理解されよう。
【0077】
ここで図6D〜図6Fを参照すると、信号209、212および215が、クラッタノッチフィルタでフィルタリングされている半径方向速度信号を示す。図6Dでは、クラッタノッチフィルタは、第1の搬送波周波数の場合に、0および一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ210a〜210n(全体としてノッチ210と呼ばれる)によって示される。ここでは、ノッチ210は曖昧な半径方向速度信号211と揃えられ、フィルタリングされた曖昧な半径方向速度信号209(破線として示される)を与える。図6Eでは、クラッタノッチフィルタは、第2の搬送波周波数の場合に、0およびここでは約240セルだけ離隔して配置される、一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ214a〜214n(全体としてノッチ214と呼ばれる)によって示される。ここでは、ノッチ214は、曖昧な半径方向速度信号213のエコーとは直接的には揃えられず、フィルタリングされた曖昧な半径方向速度信号212を与える。
【0078】
図6Fでは、クラッタノッチフィルタがさらに、第3の搬送波周波数の場合に、0およびここでは約270セルだけ離隔して配置される、一定の半径方向速度ビン間隔において生じるクラッタフィルタノッチ217a〜217n(全体としてノッチ217と呼ばれる)によって示される。ここでは、ノッチ217は、曖昧な半径方向速度信号216とは揃えられず、フィルタリングされた曖昧な半径方向速度信号215を与える。クラッタノッチフィルタリングされた信号209、212および215が半径方向速度に変換されるとき、搬送波周波数が異なると波長が異なるために、ノッチ210、214および217は、異なるセル間隔で生じる。搬送波周波数は、クラッタノッチのエイリアスが揃わないように選択される。それゆえ、ノッチ210、214および217は全てのCPIにおいて物標信号を相殺しない。
【0079】
ここで図6Gを参照すると、信号218が、信号209、212および215の非コヒーレント積分を示しており、結果として、ビン362内に真の半径方向速度219と、概ねビン92、124、602および634内にそれぞれエイリアス220a〜220dが生じる。図6Dでは、周期性は360セルであり、物標信号はクラッタノッチのエイリアスによってブロック(阻止)される。図6Eでは、周期性は240セルであり、信号はクラッタノッチのエイリアスによってブロックされない。図6Fでは、周期性は270セルであり、信号は再びクラッタノッチのエイリアス内にはない。クラッタフィルタノッチはエイリアスと同じ周期性を有する。この例では最も高い信号レベルを有する真の信号219のそれぞれの側に複数のエイリアスが存在することができる。ここでは、ドップラー信号は半径方向速度において正規化されるので、クラッタノッチフィルタの効果は全てのCPI内の半径方向速度信号を相殺しない。クラッタノッチエイリアスによる物標エコーの曖昧性は大幅に低減される。クラッタノッチを、負の信号の効果を除去するためにノッチの周囲の領域内の局部的な雑音レベルとして決定することができる雑音レベル221まで満たし、対応する各ビン内の大きさを加算することにより、フィルタ動作後に半径方向速度信号を非コヒーレントに積分することができる。累積的な雑音レベルの増加があることに留意されたい。図6D〜図6Fの場合、明瞭にするために約3つのドップラーゾーンが示されるが、計算される実際の数は、多かれ少なかれ、所望の物標半径方向速度の範囲に基づく。
【0080】
ここで図7を参照すると、1つの例示的なレンジ−半径方向速度マトリックス222が、列226a〜226mおよび行228a〜228nを有するアレイに配列される複数のセル224a〜224nを含む。レンジ−半径方向速度マトリックス222は、上記のように、時間サンプル毎に、到来する信号のパルスにわたってフーリエ変換を実行することによって得られる。結果として生成されるマトリックスにドップラー位相補正が適用される。最後に、レンジ次元のパルス圧縮が実行され、レンジ−半径方向速度マトリックス222が生成される。マトリックス222はさらに、物標位置に対応するレンジにおいて半径方向速度値232の列を含む。半径方向速度値232の列は、曖昧な速度に対応する複数のエイリアス256a〜256nと、真の半径方向速度セル254とを含む。マトリックス222はさらに、雑音カットに対応する半径方向速度値240の列を含む。半径方向速度値232の列は物標を含み、半径方向速度値240の列は物標を含まない。雑音カットに対応する半径方向速度値240の列は、システム内の雑音を表すものである。複数の雑音カット半径方向速度値240を用いて、信号対雑音比が判定される。
【0081】
CPI毎に受信される信号をコヒーレントに積分し、受信された信号の時間領域データを半径方向速度セルに変換した後に、マトリックス222が形成される。マトリックス222は、VminからVmaxまでの速度と、RminからRmaxまでのレンジとを有する、存在が見込まれる物標を含む。既知の一定誤警報率技法(CFAR)を用いて、システムは、所定の閾値よりも大きくなる全てのピーク256a〜256nを検出する。最も大きなピーク254は真の半径方向速度値であると判定される。
【0082】
ここで図8を参照すると、類似の参照番号は図7の類似の要素を示しており、処理されたエコー信号250のグラフおよび対応する雑音信号252のグラフが示される。エコーピーク266a〜266nはドップラーエイリアスを表す。エコー信号250は、ピークレンジセルを通して得られた速度カット、たとえば列232(図7)である。一例では、到来する物標が900m/secのレンジ−半径方向速度を有し、NCIにおいて6つの異なる周波数が用いられる。そのシステムは、−400m/secの最小レンジ−半径方向速度と、1200m/secの最大レンジ−半径方向速度とを設定され、400メートル/秒の約4つのドップラーゾーンを網羅する。処理されたエコー信号250の場合に、9000m/secのエコーピーク254において、最も大きな信号対雑音比が生じる。それよりも小さなエコーピーク266a〜266n(星印を付す)はドップラーエイリアスに由来し、ピーク266a〜266nの位置は式16を用いて判定される(図9に関連して後述)。エコーピーク254における曖昧でないレンジ−半径方向速度は物標レポートに含まれる。
【0083】
ここで図9を参照すると、流れ図が、本発明による、種々の搬送波周波数を有する一連のコヒーレント処理間隔(CPI)からの物標エコー信号を処理するためのステップの1つの例示的なシーケンスを示す。図9の流れ図において、長方形の要素は、本明細書では「処理ブロック」(図9の要素300によって代表される)を意味し、コンピュータソフトウエア命令あるいは命令のグループを表す。流れ図内の菱形の要素は、本明細書では「判断ブロック」(図9の要素312によって代表される)を意味し、処理ブロックの動作に影響を及ぼすコンピュータソフトウエア命令あるいは命令のグループを表す。別法では、処理ブロックは、デジタルシグナルプロセッサ回路あるいは特定用途向け集積回路(ASIC)のような機能的に同等の回路によって実行されるステップを表す。流れ図に示されるステップのうちのいくつかはコンピュータソフトウエアを用いて実施することができ、他のステップが異なる方法(たとえば実験的手順)によって実施することができることは当業者には理解されよう。その流れ図は任意の特定のプログラミング言語の構文を表していない。むしろ、その流れ図は、コンピュータソフトウエアを作成し、必要とされる処理を実行するために用いられる機能的な情報を例示する。ループおよび変数の初期化、ならびに時間変数の使用などの数多くのルーチンプログラム要素は図示していないことに留意されたい。本明細書において他に指示がなければ、説明するステップの特定のシーケンスは例示にすぎず、本発明の精神から逸脱することなく変更することができることは当業者には理解されよう。
【0084】
ステップ300では、レーダシステムは、図3あるいは図10の教示による所定の周波数技法に従って送信されるレーダ信号に応答して、エコー信号を受信する。ステップ302では、エコー信号は、当該技術分野において知られているようなローパスフィルタを用いてフィルタリングされる。ステップ304では、フィルタリングされたエコー信号がデジタル化され、メモリバッファに記憶される。
【0085】
ステップ306では、受信された信号は、本明細書において先に説明したような可変周波数スケールを有する離散フーリエ変換を用いて、半径方向速度スケールに変換される。レンジ半径方向速度マトリックスは、レーダにおいて用いられる最も短い波長である(同じく最大の周波数を有する)波長λ0を有する第1の信号で形成される。各エコー信号は、可変周波数スケールを有する離散フーリエ変換のFFTを実施することによって処理され、レンジ半径方向速度マトリックスが与えられる。
【0086】
送信される信号が可変PRFを含む一実施形態では、PRFおよび搬送波周波数に基づいて、受信される信号を周波数スケールで変換するためのさらに別のステップが必要とされるであろう。この実施形態では、変化するPRFは、フーリエ変換の付加的な定数の計算に含まれる。
【0087】
ステップ308では、半径方向速度において位相補正が計算される。半径方向速度位相補正は、パルス圧縮フィルタのレプリカがもはや正確なドップラーに合わせられる必要がなく、圧縮されたパルスの歪みが生じないので、相対的に高いレンジ分解能および信号対雑音比を提供する。ステップ310では、オプションでパルス圧縮を用いて、より短いパルスの分解能を保持しながら、より長い信号パルスを用いて物標において付加的なエネルギーが指向される。半径方向速度空間において積分を実行することにより、拡散を低減し、より良好なサイドローブを与える(すなわち、レンジがまたがることを減らす)ことにより、エネルギーが節約される。
【0088】
ステップ312では、処理すべきCPIが他にあるか否かが判定される。さらにCPIがある場合には、処理がステップ300において再開され、そうでない場合には、処理はステップ314で続けられる。ステップ314では、変換されたエコー信号はそれぞれ、ステップ306の変換によって半径方向速度空間において正規化されたレンジ−半径方向速度マトリックスにおいて処理された信号の大きさ(あるいは、用いられることになる一定誤警報率弁別器によっては、大きさの二乗)の値を加算することにより、非コヒーレントに積分される。
【0089】
ステップ316では、一定誤警報率技法を用いて、半径方向速度空間において真の物標エコーおよびエイリアスの物標エコーが検出される。ステップ318では、一実施形態では、以下の式を適用することにより、ドップラーエイリアスが除去される。
【0090】
【数24】
【0091】
ここで、Δドットrtrueはそのレンジにおける最も高い信号対雑音比を有するエコーであり、ηは正負いずれかの整数である。
送信される信号が可変PRFを含む実施形態では、レンジ次元において任意の起こり得る曖昧性を除去するためのさらに別のステップが必要とされるであろう。ステップ320では、エコー信号が既知の技法を用いて処理され、ステップ322では、物標レポートが計算される。
【0092】
ここで図10を参照すると、別の送信されるレーダ信号424が、複数の送信パルスと、その複数の送信パルスのそれぞれに続く複数の対応する受信区間とを含む、複数の一連のバースト列426a〜426n(全体としてバースト列426と呼ばれる)を含む。一実施形態では、各バースト列は異なるパルス繰返し周波数(PRF)と、パルス128a1〜128nnが送信される異なる搬送波周波数とを有する。この実施形態におけるパルス圧縮のための処理は、式2および3あるいは式12および13のフーリエ変換を用いて、そのマトリックス内に同じ数のレンジサンプルを与え、変化するPRFは、DFTの付加的な定数の計算に含まれる。送信される信号はさらに、周波数変調(FM)チャープあるいは2相位相変調された波形のいずれかを含むことができる。
【0093】
ここで、上記の技法は、複数のCPIを積分することを利用して、より高い感度を達成し、広い(CPI当たり数百MHz)周波数ダイバーシティを利用して、物標断面積を拡大し、RFマルチパス干渉を軽減可能であることは理解される。さらに、そのような技法は非コヒーレント積分を提供し、信号ドップラー周波数を揃えるためにレーダエコー信号の多大な事後処理を必要とすることなく、信号の検出可能性を高める。
【0094】
本発明がレーダへの応用形態には限定されないこと、および受信機、たとえば通信用受信機に接続されるシグナルプロセッサが、可変周波数スケールを有する離散フーリエ変換を用いて、受信される信号を処理することができることがさらに理解される。そのような装置は、第1のコヒーレント処理間隔を有する第1の一連のパルスと、異なる搬送波周波数を有し、第2のコヒーレント処理間隔を有する第2の一連のパルスとを有する信号を受信機に送信する送信機を含み、その受信機は送信される信号を受信し、積分するように構成されるであろう。
【0095】
本明細書に記載される全ての刊行物および引用文献は、全体として参照により本明細書に援用される。
【0096】
本発明の好ましい実施形態を説明してきたが、ここで、それらの概念を組み込む他の実施形態を用いることができることが当業者には明らかであろう。本発明とともに、他の送信されるレーダ信号を用いて、物標レンジおよび速度を検出することができることは当業者には理解されよう。それゆえ、これらの実施形態は開示される実施形態に限定されるべきではなく、特許請求の範囲の精神およびその範囲によってのみ制限されるべきであると考える。
【図面の簡単な説明】
【0097】
【図1】本発明によるレーダシステムのブロック図である。
【図2】本発明による、周期的な曖昧な速度を処理されたエコー信号を示す1組の曲線のグラフである。
【図3】周波数ダイバーシティを有する複数のCPIのための送信信号、および対応する受信区間を示す、1つの例示的な送信されるレーダ信号の図である。
【図3A】送信される信号および受信されるエコー信号を示す一連のCPIの図である。
【図4】種々の搬送波周波数の場合の1組の従来技術の周波数ビンを示す図である。
【図5】本発明による、種々の搬送波周波数の場合の1組の一定の半径方向速度周波数ビンを示す図である。
【図6A】本発明による、2つの異なる周波数における半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6B】本発明による、2つの異なる周波数における半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6C】図6Aおよび図6Bのドップラー信号の非コヒーレント積分後の曖昧な速度のドップラー信号のグラフである。
【図6D】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6E】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6F】本発明による、クラッタノッチフィルタでフィルタリングされ、半径方向周波数ビンによって区分される曖昧な速度のドップラー信号のグラフである。
【図6G】図6D〜図6Fのクラッタノッチフィルタで処理されたドップラー信号の非コヒーレント積分から生じる曖昧な速度のドップラー信号のグラフである。
【図7】本発明による1つの例示的なレンジ−半径方向速度マトリックスを示す図である。
【図8】本発明に従って処理されたエコー信号のグラフ、および対応する雑音のグラフである。
【図9】本発明による、可変周波数スケールの離散フーリエ変換を用いて、受信されたパルスドップラーレーダ信号を処理するためのステップを示す流れ図である。
【図10】周波数ダイバーシティを有する複数のCPIおよび複数のPRFの場合の送信信号、および対応する受信区間を示す、図3の信号の別の例示的な送信されるレーダ信号の図である。
【特許請求の範囲】
【請求項1】
パルスドップラーレーダ信号を処理して物標を検出するための方法であって、
レーダシステムからレーダ信号を送信し、該レーダ信号は所定の周波数技法に従って送信され、
1つの周波数帯域内で、前記物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、
可変周波数スケールを有するフーリエ変換を用いて前記物標エコー信号を変換する、
ことを含む方法。
【請求項2】
前記エコー信号の変換は、離散フーリエ変換を用いて、前記エコー信号をレンジ半径方向速度マトリックスに変換することを含む、請求項1に記載の方法。
【請求項3】
曖昧な速度を除去することをさらに含み、前記所定の周波数技法はさらに、周波数ダイバーシティを有する信号を含む、請求項2に記載の方法。
【請求項4】
曖昧な速度の除去は、DFTフェーザが前記速度領域の異なる領域において位置調整されるように、前記エコー信号に位相シフト重み付け関数を適用することを含む、請求項3に記載の方法。
【請求項5】
曖昧な速度の除去は、
非コヒーレント積分のために前記半径方向速度マトリックスを位置調整し、
ドップラーエイリアスから生じる複数の検出を識別し、
前記複数の検出からドップラーエイリアスを除去する、
ことを含む請求項3に記載の方法。
【請求項6】
レーダ信号の送信は、周波数ダイバーシティを有するドウェル積分を与えるために複数のパルスを送信することを含む、請求項1に記載の方法。
【請求項7】
前記複数のパルスは、それぞれ異なる搬送波周波数を有する複数のコヒーレント処理間隔(CPI)を含む、請求項6に記載の方法。
【請求項8】
可変周波数スケールを有するフーリエ変換を用いた前記物標エコー信号の変換は、前記複数のCPIのためのドップラー周波数正規化を含む、請求項7に記載の方法。
【請求項9】
前記フーリエ変換は高速フーリエ変換(FFT)として実施される、請求項1に記載の方法。
【請求項10】
前記フーリエ変換は次の式によって与えられ、
【数1】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Xp(k)は、時間を表す添字p、周波数を表す添字kを有する、周波数領域の関数であり、
xi(n)は、コヒーレント処理間隔(CPIi)毎のエコー信号入力サンプルであり、
kは2vTN/λ0に最も近い整数であり、
di=λ0/λiである、請求項9に記載の方法。
【請求項11】
前記フーリエ変換は次の式によって与えられ、
【数2】
ここで、
M=物標速度曖昧性の次数(任意の正あるいは負の整数)であり、
nはパルス繰返し間隔(PRI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Xp(k)は、時間を表す添字p、周波数を表す添字kを有する、周波数領域の関数であり、
xp(n)は、コヒーレント処理間隔(CPIi)毎のエコー信号入力サンプルであり、
kは2vTN/λ0に最も近い整数であり、
di=λ0/λiである、請求項9に記載の方法。
【請求項12】
前記フーリエ変換は次の式によって与えられ、
【数3】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
mはコヒーレント処理間隔(CPI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Ψp,k,mは、時間を表す添字p、周波数を表す添字kおよびCPIを表す添字mを有する、周波数領域の関数であり、
λminは所定の最小動作波長であり、
λmは動作波長であり、
Ψp,n,mは、時間サンプルp、PRInおよびCPImの時間領域エコー信号である、請求項9に記載の方法。
【請求項13】
c/λminに対応する最小速度を選択することをさらに含む、請求項12に記載の方法。
【請求項14】
コヒーレント処理間隔(CPI)を非コヒーレントに積分することをさらに含む、請求項1に記載の方法。
【請求項15】
ドップラー内の物標拡散を非コヒーレント積分するための事後処理を減少させることをさらに含む、請求項1に記載の方法。
【請求項16】
パルス圧縮フィルタを前記物標ドップラーに一致させるための要件を緩和することにより、相対的に高いレンジ分解能を与えるために、半径方向速度位相補正を補正することをさらに含む、請求項1に記載の方法。
【請求項17】
相対的に高い信号対雑音比を与えるために、半径方向速度位相補正を補正することをさらに含む、請求項1に記載の方法。
【請求項18】
曖昧な速度を除去することをさらに含み、前記所定の周波数技法はさらに、複数の変化するパルス繰返し周波数(PRF)を有する信号を含む、請求項2に記載の方法。
【請求項19】
可変周波数スケールを有するフーリエ変換を用いたエコー信号の変換は、前記物標エコー信号を半径方向速度に直に変換することを含む、請求項1に記載の方法。
【請求項20】
クラッタノッチフィルタで前記物標エコー信号をフィルタリングし、
前記クラッタノッチを所定の雑音レベルまで満たし、
非コヒーレントに積分するためにノッチフィルタリングされた半径方向速度マトリックスを位置調整し、
前記クラッタノッチエイリアスによって前記物標エコーが曖昧になることが実質上低減されるように、前記物標を検出するために前記ノッチフィルタリングされた半径方向速度マトリックスからの信号を積分することをさらに含む、請求項1に記載の方法。
【請求項21】
曖昧な速度を有する物標のため変化する搬送波周波数のCPIから複数の物標エコーを正規化する方法であって、
前記複数の物標エコーを半径方向速度マトリックスに変換し、該変換されたエコーは前記CPIの前記変化する搬送波周波数に対応する周期的な成分を有し、
前記物標エコーを検出し、
ドップラーエイリアスから生じる検出を識別し、
ドップラーエイリアスから生じる前記検出を除去する、
ことを含む方法。
【請求項22】
ドップラーエイリアスから生じる検出の識別は、前記半径方向速度マトリックスにおいて前記物標エコーの位置調整を含む、請求項21に記載の方法。
【請求項23】
物標速度の周波数指示を有する物標エコー信号を含む、1つの周波数帯域内の信号を受信するように適応された受信機と、
前記物標エコー信号を半径方向速度マトリックスに変換するための半径方向速度フーリエ変換器を含む、前記受信機に結合されるシグナルプロセッサと、
を備えたレーダシステム。
【請求項24】
非コヒーレント積分器をさらに備える請求項23に記載のレーダシステム。
【請求項25】
曖昧性除去器をさらに備える請求項23に記載のレーダシステム。
【請求項26】
半径方向速度位相補正器をさらに備える請求項23に記載のレーダシステム。
【請求項27】
クラッタノッチフィルタをさらに備える請求項23に記載のレーダシステム。
【請求項28】
第1のコヒーレント処理間隔を有する第1の一連のパルスと、異なる搬送波周波数を有し、第2のコヒーレント処理間隔を有する第2の一連のパルスとを送信するように適応された送信機と、
1つの周波数帯域内の信号を受信するように適応された受信機と、
該受信機に結合され、可変周波数スケールを有する離散フーリエ変換を用いて前記受信された信号を変換するためのフーリエ変換器を含むシグナルプロセッサと、
を備えた装置。
【請求項1】
パルスドップラーレーダ信号を処理して物標を検出するための方法であって、
レーダシステムからレーダ信号を送信し、該レーダ信号は所定の周波数技法に従って送信され、
1つの周波数帯域内で、前記物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、
可変周波数スケールを有するフーリエ変換を用いて前記物標エコー信号を変換する、
ことを含む方法。
【請求項2】
前記エコー信号の変換は、離散フーリエ変換を用いて、前記エコー信号をレンジ半径方向速度マトリックスに変換することを含む、請求項1に記載の方法。
【請求項3】
曖昧な速度を除去することをさらに含み、前記所定の周波数技法はさらに、周波数ダイバーシティを有する信号を含む、請求項2に記載の方法。
【請求項4】
曖昧な速度の除去は、DFTフェーザが前記速度領域の異なる領域において位置調整されるように、前記エコー信号に位相シフト重み付け関数を適用することを含む、請求項3に記載の方法。
【請求項5】
曖昧な速度の除去は、
非コヒーレント積分のために前記半径方向速度マトリックスを位置調整し、
ドップラーエイリアスから生じる複数の検出を識別し、
前記複数の検出からドップラーエイリアスを除去する、
ことを含む請求項3に記載の方法。
【請求項6】
レーダ信号の送信は、周波数ダイバーシティを有するドウェル積分を与えるために複数のパルスを送信することを含む、請求項1に記載の方法。
【請求項7】
前記複数のパルスは、それぞれ異なる搬送波周波数を有する複数のコヒーレント処理間隔(CPI)を含む、請求項6に記載の方法。
【請求項8】
可変周波数スケールを有するフーリエ変換を用いた前記物標エコー信号の変換は、前記複数のCPIのためのドップラー周波数正規化を含む、請求項7に記載の方法。
【請求項9】
前記フーリエ変換は高速フーリエ変換(FFT)として実施される、請求項1に記載の方法。
【請求項10】
前記フーリエ変換は次の式によって与えられ、
【数1】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Xp(k)は、時間を表す添字p、周波数を表す添字kを有する、周波数領域の関数であり、
xi(n)は、コヒーレント処理間隔(CPIi)毎のエコー信号入力サンプルであり、
kは2vTN/λ0に最も近い整数であり、
di=λ0/λiである、請求項9に記載の方法。
【請求項11】
前記フーリエ変換は次の式によって与えられ、
【数2】
ここで、
M=物標速度曖昧性の次数(任意の正あるいは負の整数)であり、
nはパルス繰返し間隔(PRI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Xp(k)は、時間を表す添字p、周波数を表す添字kを有する、周波数領域の関数であり、
xp(n)は、コヒーレント処理間隔(CPIi)毎のエコー信号入力サンプルであり、
kは2vTN/λ0に最も近い整数であり、
di=λ0/λiである、請求項9に記載の方法。
【請求項12】
前記フーリエ変換は次の式によって与えられ、
【数3】
ここで、
nはパルス繰返し間隔(PRI)を表す添字であり、
mはコヒーレント処理間隔(CPI)を表す添字であり、
NはCPI内のパルスの数であり、
kは周波数インクリメントを表す添字であり、
pは時間サンプルを表す添字であり、
Ψp,k,mは、時間を表す添字p、周波数を表す添字kおよびCPIを表す添字mを有する、周波数領域の関数であり、
λminは所定の最小動作波長であり、
λmは動作波長であり、
Ψp,n,mは、時間サンプルp、PRInおよびCPImの時間領域エコー信号である、請求項9に記載の方法。
【請求項13】
c/λminに対応する最小速度を選択することをさらに含む、請求項12に記載の方法。
【請求項14】
コヒーレント処理間隔(CPI)を非コヒーレントに積分することをさらに含む、請求項1に記載の方法。
【請求項15】
ドップラー内の物標拡散を非コヒーレント積分するための事後処理を減少させることをさらに含む、請求項1に記載の方法。
【請求項16】
パルス圧縮フィルタを前記物標ドップラーに一致させるための要件を緩和することにより、相対的に高いレンジ分解能を与えるために、半径方向速度位相補正を補正することをさらに含む、請求項1に記載の方法。
【請求項17】
相対的に高い信号対雑音比を与えるために、半径方向速度位相補正を補正することをさらに含む、請求項1に記載の方法。
【請求項18】
曖昧な速度を除去することをさらに含み、前記所定の周波数技法はさらに、複数の変化するパルス繰返し周波数(PRF)を有する信号を含む、請求項2に記載の方法。
【請求項19】
可変周波数スケールを有するフーリエ変換を用いたエコー信号の変換は、前記物標エコー信号を半径方向速度に直に変換することを含む、請求項1に記載の方法。
【請求項20】
クラッタノッチフィルタで前記物標エコー信号をフィルタリングし、
前記クラッタノッチを所定の雑音レベルまで満たし、
非コヒーレントに積分するためにノッチフィルタリングされた半径方向速度マトリックスを位置調整し、
前記クラッタノッチエイリアスによって前記物標エコーが曖昧になることが実質上低減されるように、前記物標を検出するために前記ノッチフィルタリングされた半径方向速度マトリックスからの信号を積分することをさらに含む、請求項1に記載の方法。
【請求項21】
曖昧な速度を有する物標のため変化する搬送波周波数のCPIから複数の物標エコーを正規化する方法であって、
前記複数の物標エコーを半径方向速度マトリックスに変換し、該変換されたエコーは前記CPIの前記変化する搬送波周波数に対応する周期的な成分を有し、
前記物標エコーを検出し、
ドップラーエイリアスから生じる検出を識別し、
ドップラーエイリアスから生じる前記検出を除去する、
ことを含む方法。
【請求項22】
ドップラーエイリアスから生じる検出の識別は、前記半径方向速度マトリックスにおいて前記物標エコーの位置調整を含む、請求項21に記載の方法。
【請求項23】
物標速度の周波数指示を有する物標エコー信号を含む、1つの周波数帯域内の信号を受信するように適応された受信機と、
前記物標エコー信号を半径方向速度マトリックスに変換するための半径方向速度フーリエ変換器を含む、前記受信機に結合されるシグナルプロセッサと、
を備えたレーダシステム。
【請求項24】
非コヒーレント積分器をさらに備える請求項23に記載のレーダシステム。
【請求項25】
曖昧性除去器をさらに備える請求項23に記載のレーダシステム。
【請求項26】
半径方向速度位相補正器をさらに備える請求項23に記載のレーダシステム。
【請求項27】
クラッタノッチフィルタをさらに備える請求項23に記載のレーダシステム。
【請求項28】
第1のコヒーレント処理間隔を有する第1の一連のパルスと、異なる搬送波周波数を有し、第2のコヒーレント処理間隔を有する第2の一連のパルスとを送信するように適応された送信機と、
1つの周波数帯域内の信号を受信するように適応された受信機と、
該受信機に結合され、可変周波数スケールを有する離散フーリエ変換を用いて前記受信された信号を変換するためのフーリエ変換器を含むシグナルプロセッサと、
を備えた装置。
【図1】

【図2】
【図3】
【図3A】

【図4】
【図5】
【図6A】
【図6B】

【図6C】
【図6D】
【図6E】
【図6F】

【図6G】
【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図3A】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図6E】
【図6F】
【図6G】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−247902(P2011−247902A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−168765(P2011−168765)
【出願日】平成23年8月1日(2011.8.1)
【分割の表示】特願2006−503052(P2006−503052)の分割
【原出願日】平成16年1月27日(2004.1.27)
【出願人】(503455363)レイセオン カンパニー (244)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2011−168765(P2011−168765)
【出願日】平成23年8月1日(2011.8.1)
【分割の表示】特願2006−503052(P2006−503052)の分割
【原出願日】平成16年1月27日(2004.1.27)
【出願人】(503455363)レイセオン カンパニー (244)
【Fターム(参考)】
[ Back to top ]