
Fターム[2B034EB35]の内容
土作業機(その他) (8,058) | ローラ又は整地装置の構成 (661) | 調節装置 (87) | 高さの調節 (36)
Fターム[2B034EB35]に分類される特許
1 - 20 / 36
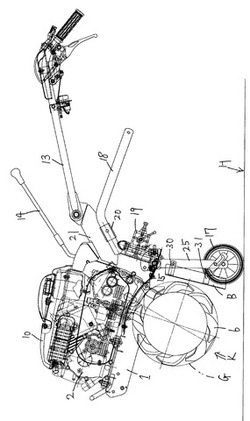
歩行型耕耘機
【課題】
本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【解決手段】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
(もっと読む)
乗用移植機

【課題】整地装置を速やかに接地させて整地作業を開始すると共に、整地ロータが非回転状態で接地して圃場面を荒らすことを防止する。
【解決手段】整地装置22の昇降範囲に、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置と、を設定し、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置22を作業位置とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行う。
(もっと読む)
排土板及び排土装置
【課題】歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供する。
【解決手段】排土板30は、走行輪14,14'及び耕耘ロータ13が設けられた機体11を備える歩行型管理機10に装着され、この管理機の前進走行に伴って地面の土を排土する。排土板30は、歩行型管理機10の機体11に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びて排土を歩行型管理機10の幅方向側方に移動させる排土板本体部50を有する。排土板本体部50の下部には、地面に対して略垂直方向に延びるエッジ部50aが形成される。排土装置1は、走行輪14の進行方向前側に耕耘ロータ13が設けられた歩行型管理機10と、この管理機の機体11に装着された排土板30とを備えてなる。
(もっと読む)
作業機及び作業システム
【課題】、高価な機器を利用せずに、圃場表面を一定の深さで削る。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
(もっと読む)
ロータリー作業機
【課題】土引き作業を行うことができるロータリー作業機を提供する。
【解決手段】ロータリー作業機1は、トラクタの後部に連結する機体2を備える。機体2には、回転しながら耕耘作業をする耕耘体3を回転可能に設ける。機体2の耕耘体カバー部には、耕耘体3の後方で整地作業をする整地体4を上下方向に回動可能に設ける。ロータリー作業機1は、整地体4の上方回動を規制してこの整地体4を土引き作業位置に位置決めする回動規制手段5を備える。回動規制手段5が、整地体4の下方回動を規制してこの整地体4の変形を防止する変形防止手段を兼ねている。
(もっと読む)
ロータリ耕耘装置
【課題】均平作業を行う際の平板の交換作業を行う必要のないロータリ耕耘装置を提供すること。
【解決手段】可撓性を有し、且つその上端部がロータリ耕耘装置8のカバー11の後端部に上下に揺動可能に連結されている平板18と、平板18の後方に配置され、ロータリ耕耘装置8のカバー11の後端部に上下に揺動可能に連結されている硬質の整地板20と、平板18と整地板20とを解除自在に接続する接続手段25,28と、整地板20を平板18から後方又は上方に離れた姿勢に解除自在に保持する保持手段14a,24とを備える。
(もっと読む)
ロータリ耕耘装置
【課題】平板と、当該平板の下辺部の横方向中央部の移動を規制する規制部材との連結が解除され難いロータリ耕耘装置を提供すること。
【解決手段】可撓性を有し、且つその上端部がロータリ耕耘装置のカバー11の後端部に上下に揺動可能に連結されている平板18と、地面に接地してロータリ耕耘装置の地面に対する高さを設定する高さ設定部材12と、平板18の横方向中央部を上下方向全体に亘って支持可能でカバー11に上下揺動自在に支持される支持部材27と、支持部材27と高さ設定部材12とを解除自在に連結する連結手段34とを備える。
(もっと読む)
田植機
【課題】整地装置の作業中において、急な整地用回転体の押し上げがあった場合であっても、当該整地用回転体の破損を防止することができる田植機を提供する。
【解決手段】田植機1は、整地装置100を備え、整地装置100は、整地用回転体111の回転支軸112を植付部40に対して昇降(回動)可能に支持するための支持リンク機構140と、整地用回転体111を昇降操作するための整地装置操作部120と、支持リンク機構140と整地装置操作部120とを連結すると共に、整地用回転体111の昇降(回動)を上昇側へのみ許容するための連結許容機構150と、を備える。
(もっと読む)
ロータリー作業機
【課題】リヤカバーを左右に揺動自在とする左右揺動部を着脱可能に備えるロータリー作業機を提供する。
【解決手段】トラクタのエンジンからの駆動力によって進行方向に回転する複数の耕耘爪と、耕耘爪を上方より覆うロータリーカバー16と、ロータリーカバー16の後端の略中央に取り付けられた、機体の幅方向に揺動可能な揺動部材を備える左右揺動部60と、中央部を揺動部材に取り付け、機体の前後進方向に回動可能なリヤカバー回動軸61と、リヤカバー回動軸61に固設されたリヤカバー17とを備え、左右揺動部60をリヤカバー回動軸61に着脱可能に取り付ける。
(もっと読む)
均平作業機
【課題】均平作業機が、均平作業に伴い、圃場表面の余剰の土を均平作業機の左右側方に掻き分けるようにして押し逃がして左右側縁に沿って不必要な畝が生じるような従来の問題を解決する。
【解決手段】均平部3は、作業進行方向に対して横方向に水平に伸びる均平支持軸20に、その長手方向に一定間隔を置いて取り付けられた複数の均平部材21とを有し、全体的に櫛歯状に構成されており、圃場外部に設けられたレーザ発光装置48から放射される水平レーザ信号49を受光装置41で受光して、受光装置41で検出した均平部3の高さに応じて、油圧シリンダ30を動作して上下可動用リンク機構4により、均平部3を圃場表面に対して一定の角度の姿勢を維持して上下に移動させて高さを制御する。
(もっと読む)
農作業機
【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する機体2を備える。機体2には、耕耘体を回転可能に設ける。機体2には、整地体4を上下方向に回動可能に設ける。農作業機1は、整地体4を耕耘体のメンテナンス作業が可能なメンテナンス作業状態になるまで機体2に対して上方に回動させる駆動手段31を備える。駆動手段31は、例えば電動油圧シリンダである。
(もっと読む)
管理機
【課題】作業性及び作業効率の良い管理機を提供する。
【解決手段】機体に回転可能に支持される車輪30・30と、車輪30・30の前方に配置され、前記機体に支持される耕耘装置40と、少なくとも一部が車輪30・30の車軸31・31と耕耘装置40の耕耘軸41・41との間に配置され、畝を形成する作業状態、又は畝を形成しない非作業状態に切り換え可能な培土器100と、を具備し、培土器100は、圃場に作用して畝を形成することが可能な作用部120と、作用部120を圃場に作用する状態、又は圃場に作用しない状態に切り換え可能な操作部110と、を具備した。
(もっと読む)
農作業機
【課題】土が前方に向かって飛散することを防止できる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する機体2を備える。機体2には、アップカット方向に回転しながら耕耘作業をする耕耘体11を設ける。機体2には、耕耘体11の後方で整地作業をする整地体16を設ける。機体2には、耕耘体11の前方で凹凸状の圃場表面部を鎮圧する鎮圧手段30を設ける。鎮圧手段30と耕耘体11との間には、耕耘体11を覆う耕耘カバー体51の下端側が位置する。鎮圧手段30は、左右方向に並ぶ複数の鎮圧輪26で構成する。
(もっと読む)
農作業機
【課題】作業効率の向上を図ることができる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する機体2を備える。機体2には、耕耘作業をする耕耘体31を回転可能に設ける。機体2には、耕耘体31の上方部を覆うカバー体36を共通軸部13を中心として上下回動可能に設ける。機体2には、耕耘体31の後方で整地作業をする整地体41を共通軸部13を中心として上下回動可能に設ける。農作業機1は、整地体41の機体2に対する上下回動に応じて、カバー体36を機体2に対して上下回動させるカバー体回動手段51を備える。
(もっと読む)
農作業機
【課題】適切な耕耘整地作業ができる農作業機を提供する。
【解決手段】農作業機1は、耕耘作業をする耕耘体11と、この耕耘体11の上方部を覆うカバー体16とを備える。農作業機1は、耕耘体11の後方で整地作業をする整地体21と、耕耘体11の前方で砕土作業をする砕土体31とを備える。砕土体31は、カバー体16の前端部に取り付ける。砕土体31は、耕耘体11の前方で砕土作業をする砕土棒状部43を有する。
(もっと読む)
歩行型管理機
【課題】ゴムたれにより簡単に畝立て作業ができる歩行型管理機を提供する。
【解決手段】尾輪体30は、耕耘装置11から後方に突設される補助フレーム31と、補助フレーム31から下方へ突設される第一支持杆32と、前記第一支持杆に対して、回動可能に取り付けた第二支持杆33と、前記第二支持杆に回転可能に取り付けられる尾輪34と、前記第二支持杆を前記第一支持杆に対して、任意の回動位置に保持する保持手段50とを具備し、前記耕耘装置と前記尾輪体との間に、該耕耘装置を後方から覆うゴムたれ15を具備し、前記第二支持杆を、前記尾輪が前記耕耘装置の最下位置よりも上方に位置するように保持手段により保持した状態で、前記尾輪体を構成する第一支持杆は、前記ゴムたれの左右中央部に当接可能とし、前記ゴムたれの左右両側により、前記耕耘装置で掘り起こされた土壌を左右に押して、畝立て作業を可能とした。
(もっと読む)
歩行型管理機
【課題】シート部材をロータリ耕耘装置の後端部から取り外すことなくメンテナンス作業を行うことが可能な歩行型管理機を提供する。
【解決手段】歩行式管理機に、ロータリ式耕耘装置40と、上端部が耕耘カバー45の後端部に固定され、下左端部に左係止孔61Lが形成され、下右端部に右係止孔が形成され、耕耘カバー45の後端部から下方に垂れ下がるゴム垂れ60と、ゴム垂れ60の左上端部を耕耘カバー45の後左端部に着脱可能に固定するノブネジ72Lと、ゴム垂れ60の右上端部を耕耘カバー45の後右端部に着脱可能に固定するノブネジと、を具備し、ゴム垂れ60の左係止孔61Lをノブネジ72Lに係止するとともにゴム垂れ60の右係止孔をノブネジに係止する。
(もっと読む)
乗用型田植機
【課題】低コストで植付け深さに連動して整地装置の高さ位置を調節する乗用型田植機を提供することを目的とする
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、支持ステー30,30間には連動軸57が回動自在に支持されている。連動軸57には整地ロータ昇降用アクチュエータ54及びフロート遥動角検出ポテンショメータ55が取付けられたモータ・ポテンショベース59が遊嵌されていると共に、整地ロータ昇降用アクチュエータ54の出力ギヤと噛合するセクタギヤ67が固設されている。連繋リンク73が植付け深さが変更されたことに応じてモータ・ポテンショベース59を回動させると、出力ギヤ及びセクタギヤ67の噛合によって連動軸57が回動し、該連動軸57に取付けられた第2連結アーム65及びステー62を介して整地ロータ17が昇降する。
(もっと読む)
移植機
【課題】植付深さを調整する調整レバー及び載せ台からの苗の掻き取り量を変更する変更レバーを設け、植付け深さ調整に整地作業機の昇降高さ調整を連動させる移植機において、左右バランスが良好な移植機を提供する。
【解決手段】走行機体の後方に配置された苗載せ台と、苗載せ台の下方に配置されて苗を掻き取って圃場に植付ける植付部と、植付部の前方に配置されて圃場を整地する整地作業機6と、昇降作動機構33と、植付深さを調整する調整レバー31と、対地高さの変更に整地作業機6の昇降高さを連動させる連動機構34と、苗載せ台と植付部との距離を変更して苗の掻き取り量を変更する変更レバー27とを備え、植付作業機4の少なくとも一部を構成し、植付作業機の左右の一方側に、昇降作動機構33及び連動機構34を配置するとともに、他方側に調整レバー31及び変更レバー27を配置した。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
1 - 20 / 36
[ Back to top ]