
Fターム[2B304LC04]の内容
Fターム[2B304LC04]に分類される特許
1 - 20 / 36
雪下野菜の収穫方法及び収穫装置
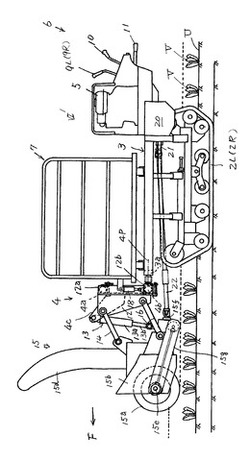
【課題】従来雪下の野菜収穫のための除雪作業手段は人手によるほかなかったが、除雪作業を機械化することで軽労化をはかる。
【解決手段】走行車体1に除雪装置15を装着し該走行車体1を圃場に形成する畝に沿って走行させながらこの畝面U及び該畝面Uに生育する野菜V,V…に堆積する積雪を上記除雪装置1によって生育した野菜V,V…を残して除去することによって、主として手作業に頼る収穫作業の際の除雪作業を無くしあるいは省力化し、該収穫作業の軽労化及び能率向上を図ることができる。
(もっと読む)
作業車両

【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
作業車両
【課題】昇降可能に装架した苗植付部や播種機等の作業装置の上昇操作を忘れた場合においても、機体後進による作溝機の詰まりや破損等の事態を招くことなく、圃場作業を円滑に進めることができる作業車両を提供する。
【解決手段】苗移植機は、作業装置4を昇降自在に支持するリンク機構およびその昇降位置検知部材と、作業装置4に設けた作溝器に粒状体を供給する粒状体供給装置5と、前後進の車速選択とリンク機構の支持高さ調節とを行う走行操作レバー73およびその走行操作検知部材73Sと、後輪回転検知部材と、報知部材71と、作業装置4に配置された報知停止スイッチ72とを走行車体に備えて構成され、リンク機構が所定高さ以下、走行操作レバー73が後進車速位置、後輪11が回転の3条件全てに該当した時に、報知停止スイッチ72の操作まで報知部材71を作動する制御を構成したものである。
(もっと読む)
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
農作業機
【課題】ローリングスプリング20と油圧ローリングシリンダ17によるロ−リング姿勢制御を自動的に切り替えることができる農作業機を提供することである。
【解決手段】所定時間内に走行部傾斜角センサ24の検出する傾斜角度の変化が所定範囲内であると、油圧ローリングシリンダ17が駆動制御しない状態として、緩衝部材20による苗植付装置6の姿勢変更を行い、前記傾斜角度の変化が所定範囲を超えると油圧ローリングシリンダ17によるロ−リング姿勢制御を行うように制御装置27がコントロールするので、苗植付装置6の姿勢変更を自動的に行うことができる。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
移植機
【課題】新たな油圧バルブや操作手段を設けることなく植付装置の下降速度を遅くすることを可能とした移植機を提供する。
【解決手段】乗用田植機1は、油圧モードとされた際、植付装置30を昇降駆動する際の通常の速度より遅い速度によって植付装置30を下降させる遅速制御位置48と、油圧シリンダ21の下降を停止させる停止位置49とを設けた油圧感度調節ダイヤル16を備えので、油圧モードに切換えられた際、即ちメンテナンス時等の際にも、新たに操作手段を設けることなく、通常よりも遅い下降速度によって植付装置30を下降させることができる。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
1 - 20 / 36
[ Back to top ]