
Fターム[2B396PE06]の内容
脱穀機要素−籾処理 (10,947) | 操作装置、制御装置又はセンサからの伝達機構 (143) | 信号又は操作伝達手段 (122) | 電気信号式伝達 (89)
Fターム[2B396PE06]の下位に属するFターム
パルス信号[デジタル信号] (10)
Fターム[2B396PE06]に分類される特許
21 - 40 / 79
農作業機の制御装置
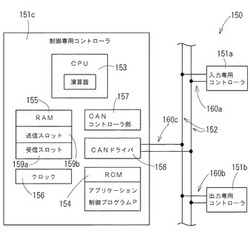
【課題】LAN又はCAN通信環境を複数のコントローラに適用した農作業機の制御装置において、従来よりも更に好適な制御構造を構築する。
【解決手段】本願発明の制御手段150は、各入力系機器からの入力制御に特化した入力専用コントローラ151aと、各出力系機器への出力制御に特化した出力専用コントローラ151bと、プログラム処理に特化した制御専用コントローラ151cと、各コントローラ間を接続するCAN通信バス152とを有する。各入力系機器からの入力情報は、入力専用コントローラ151aを介して制御専用コントローラ151cに伝送され、前記入力情報に基づき制御専用コントローラ151cにて得られた出力情報が、制御専用コントローラ151cから出力専用コントローラ151bを介して各出力系機器に伝送される。
(もっと読む)
脱穀装置の開閉操作装置及びコンバイン

【課題】 脱穀経路で穀稈詰まりが生じた場合であっても、上部ケースの作業位置での固定解除を容易に行えるようにして、穀稈詰まりの対処を迅速に行えるようにすること。
【解決手段】 上部ケースの作業位置からの開操作を阻止する固定状態と開操作を許容する解除状態とに切り換え可能に構成された固定手段(58)、上部ケースを開閉駆動する開閉駆動手段(51)、上部ケースの開操作及び閉操作を指令する開閉指令手段(48)、固定手段を切り換え駆動する切換駆動手段(68,70)が設けられ、制御手段(50)が、開操作が指令されると、開閉駆動手段(51)を上部ケースの閉操作側に作動させた状態で固定手段(58)を固定状態から解除状態に切り換え、次に、上部ケースを開操作するべく、切換駆動手段(68,70)及び開閉駆動手段(51)の作動を制御するように構成されている脱穀装置の開閉操作装置。
(もっと読む)
コンバイン
【課題】第1オーガ操作具によるオーガ操作と第2オーガ操作具によるオーガ操作とが競合しないように構成されたコンバインにおいて、第1オーガ操作具及び第2オーガ操作具の制御部との電気的接続や、制御部の処理手順を簡略化することを課題としている。
【解決手段】運転席1側に設けられた第1オーガ操作具18と、運転席1以外の場所にいる作業者から操作可能に設けられた第2オーガ操作具22と、前記第1オーガ操作具18及び第2オーガ操作具22からの操作信号に応じてオーガ7の駆動制御を行う制御部24とを備えたコンバインにおいて、第1オーガ操作具18から制御部24への操作信号の入力を停止させる信号入力停止手段を設け、制御部24にオーガ7の異なる操作を指示する操作信号が入力されると前記信号入力停止手段により第1オーガ操作具18から制御部24への操作信号の入力を停止させる。
(もっと読む)
穀粒排出装置
【課題】穀粒排出筒2の自動収納時に、この穀粒排出筒2の自動短縮によって螺旋羽根間に穀粒を挟んでしまい、砕米や螺旋羽根の損傷が発生することを防止する。
【解決手段】グレンタンク(1)の内部から穀粒排出筒(2)先端部の穀粒排出口(7)に至る穀粒搬送経路中に穀粒検出センサ(8)を設け、該穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過した後に自動旋回が開始された場合には、伸縮駆動装置(3)へ短縮作動出力が出力されて穀粒排出筒(2)が自動的に短縮し、穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過する前に前記自動旋回が開始された場合には、伸縮駆動装置(3)への短縮作動出力が出力されないように、コントローラ(6)から伸縮駆動装置(3)への作動出力を牽制する。
(もっと読む)
コンバイン
【課題】穀粒排出筒からの穀粒のこぼれ落ちの防止、及び穀粒排出筒の取り扱い性の向上を図る。
【解決手段】穀粒貯留タンク(6)内の底部から穀粒排出筒(8)内に至る穀粒移送経路中に穀粒検出センサ(6a,8a)を設け、該穀粒検出センサ(6a,8a)が貯留穀粒を検出している状態において穀粒排出筒(8)を機体上の格納位置側へ移動させる場合には排出筒(11)を自動的に上向きに回動させる自動回動制御を実行する。但し、穀粒検出センサ(6a,8a)が貯留穀粒を検出しない状態において穀粒排出筒(8)を機体上の格納位置側へ移動させる場合には排出筒(11)を上向き回動させないように排出筒(11)の自動回動制御を牽制する。
(もっと読む)
コンバイン
【課題】排出オーガに吊り下げ支持した収容部材の重みで、該排出オーガを曲げて変形させてしまうことを防止する。
【解決手段】グレンタンク8内の穀粒を機体外部に排出する排出オーガ9を昇降可能に備えたコンバイン1において、前記排出オーガ9からの穀粒を収容する収容部材50を排出オーガ9先端部の穀粒排出口27近傍に吊り下げ支持するフック51と、該フック51に収容部材50を吊り下げ支持しているか否かを検知する検知手段55と、前記排出オーガ9の昇降動作および穀粒排出動作を制御する制御手段58とを備え、該検知手段55がフック51に収容部材50を吊り下げ支持したことを検知すると、該制御手段58が排出オーガ9の昇降速度を基準値よりも低下させるように構成した。
(もっと読む)
コンバイン
【課題】排出オーガの排出口近傍に排出オーガに負荷が掛からないような構造のフレコンバック吊り下げ用フックを設けて、フレコンバックをフックから外れにくくし、継続して穀物の排出を可能とするコンバインを提供する。
【解決手段】グレンタンク17内の穀粒を機外に排出するための排出オーガ21を有するコンバイン11において、前記排出オーガ21先端部の排出口24の両側にフック80を設け、該フック80によりフレコンバック90を吊り下げ支持するように構成するとともに、前記フック80は上下にスライド可能に構成され、かつ、保持手段85により設定荷重で保持されるように構成した。
(もっと読む)
農作業車
【課題】ベルトテンション式クラッチの入切操作を、アクチュエータを駆動させて行う遠隔操作手段と、手動で行う手動操作手段とを簡単な構造で設ける。
【解決手段】遠隔操作手段91をアクチュエータ92と接続し、該遠隔操作手段91の操作によりアクチュエータ92を駆動させて、ベルトテンション式クラッチ36の入切を行う農作業車1において、前記クラッチ35に手動操作手段101を連係機構を介して連結し、該連係機構の中途部に前記アクチュエータ92を配設して、前記手動操作手段101の操作によりアクチュエータ92が駆動しない状態で、該クラッチ36の入切を可能とした。
(もっと読む)
作業機の無線式操作装置
【課題】 無線式指令手段による被操作部の誤操作を防止することを、使い勝手を損なわずに行うことができる作業機の無線式操作装置を提供すること。
【解決手段】 被操作部の複数種の作動についての複数種の操作指令を機体側制御手段(H)に無線信号にて指令する手動操作式の無線式指令手段(42)が設けられ、無線式指令手段が、指令受付状態と指令拒否状態とに切換自在で、かつ、指令拒否状態であることを示す非送信動作状態情報を出力するように構成された出力制御手段を備えて構成され、機体側制御手段が、非送信動作状態情報を受信すると、被操作部の複数種の作動を停止させるべく、被操作部の作動を制御するように構成されている作業機の無線式操作装置であって、機体側制御手段が、非送信動作状態情報を受信したときに、複数種の操作指令のうち特定の特定操作指令に基づいて被操作部が作動している場合には、その被操作部の作動を継続させる作業機の無線式操作装置を構成した。
(もっと読む)
コンバインの穀粒排出構造
【課題】 コンバインの穀粒排出構造において、オーガの排出口から穀粒をトラックの荷台に排出する状態や、オーガの排出口から穀粒を籾袋に排出する状態の場合、作業能率を向上させる。
【解決手段】 オーガ8の排出口12からの穀粒の排出を許容する排出許容姿勢A2及びオーガ8の排出口12からの穀粒の排出を阻止する排出阻止姿勢A1に切換自在な排出切換部材29を、オーガ8の排出口12に備える。オーガ8の移動速度が高速であると排出切換部材29が排出阻止姿勢A1に操作され、オーガ8の移動速度が低速であると排出切換部材29が排出許容姿勢A2に操作されるように構成する。
(もっと読む)
コンバイン
【課題】メンテナンス等でグレンタンクを側方に回動して開放したときに、一側が下方に傾斜しないコンバインを提供する。
【解決手段】グレンタンク13と、該グレンタンク内の穀物を外部に排出するための穀物排出装置15とを備え、該グレンタンクの一側下部にグレンタンク重量を測定する重量センサ32を設けた構成において、該グレンタンクの他端を穀物排出装置の縦排出オーガ15aを中心に側方へ回動できるように支持するとともに、グレンタンクの側方回動時にグレンタンクが前方へ傾かないように回動時グレンタンク固定機構60を設けた。
(もっと読む)
コンバイン
【課題】排出オーガの旋回位置や旋回範囲をオーガ位置スイッチで検出するコンバインにおいて、オーガ位置スイッチの数よりも多い旋回位置や旋回範囲を判断可能にし、オーガ位置スイッチの数を抑える。
【解決手段】排出オーガ5の旋回位置や旋回範囲を検出しつつ、排出オーガ5の旋回動作を制御するコンバイン1において、排出オーガ5の旋回位置や旋回範囲を検出する複数のオーガ位置スイッチSW1〜SW3と、これらのオーガ位置スイッチSW1〜SW3から出力されるON/OFF信号の組み合せパターンに基づいて排出オーガ5の旋回位置や旋回範囲を判断する制御部18とを備える。
(もっと読む)
コンバイン
【課題】アクチュエータを介して昇降または旋回動作可能な穀粒排出オーガを、オーガ操作具の手動操作により格納位置であるオーガレストのオーガ受け上に旋回して格納する際の作業性を向上させる。
【解決手段】オーガ操作具34により穀粒排出オーガ29を下降動作させる時、オーガ位置検出手段43,44によって穀粒排出オーガ29がオーガレスト35上方の所定位置にあることを検出すると、穀粒排出オーガ29がオーガレスト35に自動的に格納されるように、当該穀粒排出オーガ29を昇降動作させるアクチュエータ31への一定時間の下降出力制御を実行するように構成した。
(もっと読む)
作業機の無線式操作装置
【課題】無線式指令手段の誤操作による被操作部の誤操作を防止できるものでありながら、被操作部を操作する場合の操作性の向上を図ることができる作業機の無線式操作装置を提供すること。
【解決手段】被操作部の作動についての複数種の操作指令を機体側制御手段に無線信号にて指令する手動操作式の無線式指令手段42が設けられ、無線式指令手段が、操作指令を指令する指令操作手段43〜50と、無線信号を出力する稼動状態と出力しない休止状態とに切換自在な出力制御手段53と、出力制御手段を稼動状態と休止状態とに切り換える動作状態切換手段56とを備え、動作状態切換手段が、出力制御手段が休止状態である場合に指令操作手段にて特定操作指令が指令されると、出力制御手段を稼動状態に切り換えるように構成されている作業機の無線式操作装置。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】 移動目的に適した速度で穀粒排出用オーガを移動させることができる使い勝手のよいコンバインにおける穀粒排出用オーガの操作装置を提供すること。
【解決手段】 制御手段が、端末側指令手段にて指令される指令情報BU,BD,BR,BLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合の方が、機体側指令手段にて指令される指令情報CU,CD,CR,CLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合よりも低速で穀粒排出用オーガが昇降作動及び旋回作動するように、昇降用アクチュエータ及び旋回用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの操作装置を構成した。
(もっと読む)
コンバイン
【課題】排出オーガの収納時に発生する無駄な時間を省き、速やかに作業に復帰することを可能とし、穀粒搬送作業を潤滑に進めることのできるコンバインを提供する。
【解決手段】縦排出オーガ15aと横排出オーガ15bから構成される穀粒排出オーガ15と、該穀粒排出オーガ15を旋回させる旋回装置34と、前記穀粒排出オーガ15を昇降させる昇降装置30とを備えたコンバインにおいて、前記横排出オーガ15bの旋回角度と仰角を測定するための測定手段35及び37を備え、排出位置を検知するとともに、排出位置から予め設定した機体干渉を避ける位置までの水平方向と垂直方向の距離を演算し、旋回装置34と昇降装置30を同時に駆動して機体干渉を避ける位置まで到達するように前記旋回34装置及び昇降装置30を制御した。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの自動旋回に係る旋回指令手段をシンプルで操作が容易なものとし、かつ、穀粒排出オーガの自動旋回に係る誤操作を防止するコンバインを提供する。
【解決手段】穀粒排出オーガが停止する作業位置は、旋回セット操作スイッチ153を一回押す毎に、収納位置からの旋回量が最も小さい作業位置から順に大きい作業位置へ変更され、旋回セット操作スイッチ153を作業位置の数よりも一回多く押すと穀粒排出オーガ15の旋回が停止し、さらに旋回セット操作スイッチ153を一回押すと再び穀粒排出オーガ15が停止する作業位置が収納位置からの旋回量が最も小さい作業位置に変更される。
(もっと読む)
排出オーガ操作装置の配置構造
【課題】従来、グレンタンクから穀粒を取り出す排出オーガを、収納位置から排出位置に移動させるための手動操作レバー等の操作装置は、運転席の後側に配置されており、排出オーガの操作レバーがどこにあるか判らないことがあった。そこで、初心者でも排出オーガの操作レバーを容易に認識できるようにしようとする。
【解決手段】 運転席21側部にアームレスト38を備えるコンバイン1であって、グレンタンク13内の穀粒を外部に取り出す排出オーガ18を操作する手段39を、アームレスト38に回動自在に設けた。
(もっと読む)
オーガ制御装置
【課題】オーガ機構の所望旋回位置への移動操作を作業性良く行うことのできるオーガ制御装置を提供する
【解決手段】旋回用アクチュエータ134によってオーガ機構15を旋回軸線回りに旋回させるように構成されたコンバイン201のオーガ制御装置は、制御装置100と、オーガ機構15の旋回角度θを設定する旋回角度設定手段20と、オーガ機構15の旋回角度θsを検出する旋回角度検出手段40とを備え、制御装置100は、旋回角度設定手段20による旋回角度θを設定旋回角度として記憶し、該設定旋回角度θ及び旋回位置検出手段40による検出値θsに基づき、オーガ機構15が該設定旋回角度θに位置するように旋回用アクチュエータ134を作動させる。
(もっと読む)
コンバイン
【課題】縦筒、横筒、伸縮筒及び排出筒からなる排出オーガ付きのコンバインにおいて、ユニバーサルデザインの観点から排出オーガに対する操作手段の操作性を向上させる。
【解決手段】無線式リモートコントロール装置101はL字状又は湾曲状の操作レバー103を備える。操作レバー103における横レバー部105の先端部には、その軸心r方向に沿ってのスライド操作と軸心r回りの首振り回動操作との2種類の操作が可能なグリップ部106を設ける。このように、リモートコントロール装置101における1本の操作レバー103に対して、排出オーガ8に対する水平旋回操作機能、起伏揺動操作機能、伸縮操作機能及び首振り回動操作機能という4種類の操作機能を集約することにより、排出オーガ8に対する4種類の操作を片手で実行できる。
(もっと読む)
21 - 40 / 79
[ Back to top ]