
Fターム[2C150CA01]の内容
Fターム[2C150CA01]に分類される特許
441 - 460 / 464
そっくり人形の制作方法
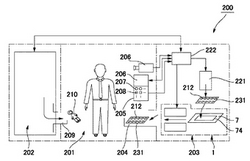
【課題】 立体形状の顔型に利用者の顔写真が印刷されたそっくり人形を簡単に制作可能な方法を提案すること。
【解決手段】 そっくり人形制作システム200では、撮影ブース210に入った利用者の顔写真をカメラ206により撮影し、これをパーソナルコンピュータ222で編集して、収納部221から供給される顔型212の表面にインクジェットプリンタ1を用いて印刷する。利用者は、人形販売機202から好みの人形210を購入し、その顔部分211に、自分の顔写真が印刷された顔型212を取り付ける。インクジェットプリンタ1を用いて顔型212の立体表面に直接に顔写真を印刷することにより、顔写真シールなどを人形の顔部分に貼り付ける場合に比べて、簡単に自己のそっくり人形を制作できる。顔型は着脱可能であるので、気に入った顔型に交換することも簡単である。
(もっと読む)
変形可能な玩具

【課題】 子供のわくわくするような興奮、楽しみ、及び玩具に関する興味を向上させるための多機能及び異なる用途を有する玩具を提供すること。
【解決手段】 変形可能な玩具は、第1可動部材、第2可動部材、および間に位置し、かつ第1及び第2部材に連結された連結器を含む。連結器は、第1及び第2可動部材を閉位置まで互いに近づくように及び実質的な開位置まで互いに遠ざかるように独立して移動すなわち回動させることを可能にするように構成される。第1及び第2可動部材は少なくとも1つのリビーラーを含む。リビーラーは、第1及び第2可動部材の1つに可動に連結され、かつ第1及び第2可動部材が開位置にある時に少なくとも1つの表面を顕示するために可動である。一実施形態では、玩具は、閉位置では球を、開位置では小像を構成する。
(もっと読む)
ロボットの動作計画方法
【課題】 本発明の目的は、ロボットの初期姿勢から最終姿勢までの安定した動作を計画することのできるロボットの動作計画方法を提供することにある。
【解決手段】 本発明のロボットの動作計画方法は、ロボットの初期及び最終姿勢に基づいて、初期姿勢と最終姿勢とをつなぐ動作を確率を用いて計画するもので、重力によってロボット各部に作用する複数のモーメントの釣合条件に基づいて、動作中のある時点での停止状態でロボットが転倒するか否かを静的に判定する静的転倒判定工程と、静的転倒判定工程において、ロボットが動作の間に静的に転倒しないと判定された場合に、重力及び動作による慣性力によって該ロボットに作用する複数のモーメントのつり合い条件を考慮して動作中にロボットが転倒しないと動的に判定されるように、該ロボット各部の速度及び/又は加速度を設定する速度/加速度変更工程とを備えていることを特徴としている。
(もっと読む)
同行する誕生こけし
【課題】大きくて重量のある「誕生こけし」を如何に携行容易に構成するか、を明らかにすることを課題とする。
【構成】誕生を記念して製作された誕生こけしとの間が、共感呪術の法則が機能する要因(紐帯)により結び付けられている携行小物であり、当該誕生こけしから取り外して当該誕生こけしの所有者(保持者)が携行することが可能である携行小物を持つことを特徴とする通常携行することが困難である高さ及び又は重さを有する同行する誕生こけしである。
(もっと読む)
形態変形性擬毛
【課題】 常温域乃至常温より僅かに高温の温度域における、外部応力による賦形性、前記賦形による変形形態の保持性、及び前記変形形態からの原形状への復帰性を効果的に発現させる、人形用頭髪等に好適な形態変形性擬毛を提供する。
【解決手段】 特定の熱可塑性樹脂(A)と、ガラス転移温度が20〜50℃の熱可塑性重合体(B)とを特定割合でブレンドして成形した、芯鞘型構造の外径10〜200μmのフィラメントの5〜100本からなるマルチフィラメントを構成単位として、フィラメント相互を交差状に緊密状態に集合させてなる、紐状形態の形態変形性擬毛を構成する。
(もっと読む)
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム
【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
介護用ぬいぐるみ
【課題】 高齢者に対してあたかも本物の動物に触れたときのような温かみを与えることができて優れた癒し効果を発揮することが可能であって、痴呆症の予防や解消に優れた効果を発揮することができ、介護者の負担の軽減に役立てることが可能な介護用ぬいぐるみを提供すること。
【解決手段】 ぬいぐるみ本体と、該ぬいぐるみ本体の表面温度を人体の体温付近の温度に温める加温体とからなる介護用ぬいぐるみとする。
(もっと読む)
警備ロボット
【課題】車などの移動体に搭乗可能なロボットであって、ロボット自ら異常の度合を判定し、それに応じて動作するようにした警備ロボットを提供する。
【解決手段】加速度センサ(内界センサ)およびCCDカメラ、マイクロフォンなどの外界センサを備え、それらの出力から得られる情報に基づいて車Vに生じつつある異常の度合をSMALL,MEDIUM,LARGEと判定し(S10から16)、判定された異常の度合に応じて注意、警告、制止のいずれかからなる防止動作を行う(S18から28)。
(もっと読む)
教育用おもちゃ
【課題】
【解決手段】教育用おもちゃが、胴体を有するおもちゃのフィギュアと、胴体の一部の中に取り付けられたフレームと、フレーム内に配置された地球儀とを有する。地球儀は、フレームの中で回転するよう構成されている。おもちゃのフィギュアは、人形、置物、テディーベアまたは他の動物のぬいぐるみ、膨張式水中おもちゃ、指または操り人形、または、人間、動物、宇宙人、架空のもの、または回転する地球儀を取付可能な体を有する他のキャラクターを表す他のおもちゃのフィギュアでよい。地球儀は、地球を表すよう構成され、大陸および少なくとも大きな国または地理的領域を表す形状を有し、山や他の地形を表す凹凸を有してもよい。任意に、教育用おもちゃは、照らされたり、教育用音声メッセージを再生したり、地球儀を回転させるモータを有してもよい。
(もっと読む)
風船ホルダー
【課題】競技等観戦中に、風船玩具に空気を充満しておきながら直ちに飛ばすことができない場合に、手で握りしめているか、結節を作る等して待たなければならない。また、数個作り、飛ばすチャンスが来ると、素早く飛ばせる風船ホルダーが要請されていた。
【解決手段】風船ホルダー1は、本体部2と口環押圧部3と口環掛用軸棒部4とからなり、本体部2と口環押圧部3との間を、係止具5の係止鉤7により掛け止めされ、必要に応じて係止具押釦6を押すと、弾性体9により解き放され、口環22と風船玩具23が飛び出すもの。本体部2には、電装装置12及びマスコット11を装着し、気体注入装置25が付設でき、また、好みに応じてマスコット等は交換できるようになっている。口環押圧部3には、係止鉤掛溝8と口環押圧部脱落防止板18と摺動安定板20を設けている。口環掛用軸棒部4は、本体軸棒部10に接合され、口環22及び風船玩具23を着脱する。
(もっと読む)
人間型ロボットの制御装置
【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
玩具
【課題】 少ないセンサ等で多種多様な動作をすることができる玩具を提供する。
【解決手段】 人形本体1はでん部センサ23および額部センサ31を有し、各センサの感知の有無の組み合わせによって、異なる音声を発したり、使用者と会話を行ったりする。例えば、人形本体1を座らせると、でん部センサ23が光不感知で額部センサ31が光感知の「音声認識可能状態」となり、「音声認識可能状態」から人形本体1を抱き上げると、でん部センサ23が光感知で額部センサ31が光感知の「抱き上げ状態」となる。さらに「抱き上げ状態」から人形本体1を抱きしめると、でん部センサ23が光感知で額部センサ31が光不感知の「抱きしめ状態」となる。一方、「音声認識可能状態」で部屋を暗くするとでん部センサ23が光不感知で額部センサ31が光不感知の「消灯状態」となる。
(もっと読む)
ロボット装置の制御システム及び制御方法
【課題】 複数台のロボットが協調的に動作し、全体としてある特定の目的を実現するマルチロボット・システムに関する。
【解決手段】 マルチロボット・システムは、舞台上で活動する複数のロボットと、舞台上のロボットの動作を監視するモニタ・システムと、マルチロボットの運用を行なう統括コントローラで構成される。統括コントローラは、ロボットの状態と、モニタされた位置及び方向に基づいて、ロボットに対する動作指示や、ロボットに対する位置及び方向の補正指示、異常発生(若しくは予測)時におけるロボットへの動作指示を、無線LAN経由でリアルタイムに行なう。
(もっと読む)
ボール・ソケット継手により接合される複数の身体部品を有するフィギュア玩具
複数の身体部品を備え、ボール・ソケット継手構造により、それぞれが動作可能に次々と接合されるようになっている関節式フィギュア玩具(1000)であって、ボール・ソケット継手構造はそれぞれ、身体部品の領域から突出したボール部(10)を有し、また、接合用身体部品にある対応するソケット部(15)も有し、ボール部(10)はシャフト(30)に支持されるノブ(20)を有し、ソケット部(15)はノブ(20)を回転可能に受け入れるソケットを有し、上記ボール・ソケット継手構造の1つまたは複数において、ソケット部(15)には内部にソケットを有するとともに輪郭のあるキャビティ構造(50)が設けられ、前記輪郭のあるキャビティ構造(50)は前記輪郭のあるキャビティ構造でのシャフト(30)の動きの範囲を制限する、関節式フィギュア玩具。  (もっと読む)
(もっと読む)
無線通信を使用して外部演算パワーを利用する小立像
本発明は、無線通信を利用して外部コンピュータの演算パワーを利用する小立像に関する。この小立像は、視覚的もしくは可聴入力をキャプチャし、直接的またはネットワークを介して、入力を外部コンピュータに対して無線で転送可能である。外部コンピュータは、入力を処理して出力を生成し、出力を小立像に対して転送する。この結果、小立像が直接的に処理して出力を生成したかのように、出力を子供に対して提示可能である。  (もっと読む)
(もっと読む)
取り外し可能な磁気機構を備えたモジュラー構成システム
システムは非磁気材料からなる複数のモジュラーブロック(10、14)を含んで、例えば建物、人形、動物、自動車を模倣した構成または他のあらゆる装飾的組立体を創作するために組立てられる。ブロックを接続するための機構は、複数の磁気フレーム部材(11、12)を含み、各モジュラーブロック(10、14)内または構造体の隣接するブロック間に位置する対応する台座部(13、17)内取り外し可能に配置される。当該モジュラーブロック(11、12)および機構の磁気フレーム部材は、組立体の組立て状態で相互に係合可能な肩部面(18、19)を具備する。 (もっと読む)
トイフィギュア遊具
トイフィギュアの形の遊具は、略鉛直な線または平面に沿った略中央で分割することによって左右の半体に分離することができ、異なるフィギュアを作り出すために別のトイフィギュアの対向する半体と結合することができる本体部材を有する。左右の半体のそれぞれは、好ましくは、前もって割り当てられたゲーム値またはパワー値および名前を有する。二つの半体が連結されると、それらは結合した名前か結合したゲーム値を備える元の一体フィギュアまたは分割フィギュアを作り出す。元の一体フィギュアの二つの半体または分割フィギュアの二つの半体は、連結されるとき、隣接部の線周りで目に見える継ぎ目がなく合体する。さらに、二つの半体の顔、頭、胴の外観も、外観全体の印象や目に見える全体のイメージを作り出すために、目に見える継ぎ目がないように合体している。 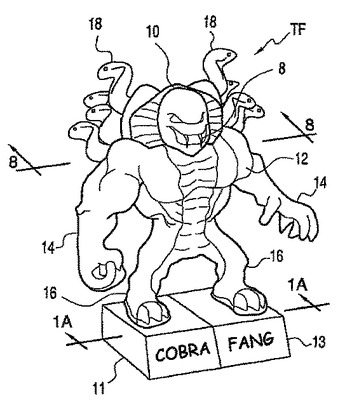 (もっと読む)
(もっと読む)
駆動可能なウォブルヘッド
ウォブルアクション人形であって、プリントが付され、成形されたボディと、それに固着されたイメージを含む。イメージは、デジタル写真により自由に設定できる。イメージは、組み立て部品を介して人形のボディに固定される。組み立て部品には、スプリングを含み、スプリングは少なくとも1つの基板に垂直に取り付けられ、イメージは、ボディに対しユニークな振る動きを行う。 (もっと読む)
脚付きロボット用の流体移動によるバランスシステム
本発明は、動いている間または任意の仕事を遂行している間にバランスが失われることを防止し、同様に二つ以上の脚部を有するロボットが重み運搬する際の、脚付きロボット向けのバランスシステムに関する。本発明により開発される、二脚ロボットまたは多脚ロボット向けのバランスシステムは、基本要素としてのバランス流体ポンプ(2)、バランス流体タンク(5)、バランス流体移動管(6)、およびバランス流体(7)によって特徴付けられている。ロボットのバランスは、タンク(5)間でバランス流体(7)を移動させることによって供される。 (もっと読む)
唇を突き出す動きをする人形、および連動して瞼を閉じる動きをする人形
【課題】人々にユーモアと癒しを与える人形の提供。
【解決手段】人々にユーモアと癒しを与える手段として、普通の顔面状態からキスの仕草で唇を突き出し、また引き込むことで元の顔面状態に戻る一連の動作をする人形、および唇を突き出す動きに連動して瞼を閉じ、唇を引き込む動きに連動して瞼を開いて元の状態に戻る一連の動作をする人形を提供する。作動は、ボタン、あるいはスイツチの操作によって、ボタン、あるいは電動装置などに接続した押圧軸、および連結軸などを介し、唇を突き出し、瞼を閉じる動作をする。なお、人形とは人間の形態を表わす人形、猿や花など動植物の人形、および擬人化した人形など、包括的な人形を含むものである。また動力は手動、あるいは電動など手段を問はない。
(もっと読む)
441 - 460 / 464
[ Back to top ]