
Fターム[2C150CA01]の内容
Fターム[2C150CA01]に分類される特許
381 - 400 / 464
人形玩具
【課題】
体部を大きくすることなく、内部に音声機構を組み込み、また、一方の腕部を動かすと、他方の腕部も連動して動く人形を提供する。
【解決手段】
本発明は、胴部と頭部、左腕部、右腕部を有し、頭部は胴部よりも大きいものとされ、右腕部は軸部を有し、また、前記胴部の側面に回転可能に軸止され、また前期右腕部には付属物が取り付けられ、一方左腕部は胴部に軸止され、また、頭部はその内部が空洞とされ、前記空洞部に、電池と電池ホルダー、音声基板、スピーカー、スイッチホルダーとが設置され、また、頭部から下方に延設されたスイッチホルダーの先端にリーフスイッチを有し、前記電池ホルダーは帽子部により蓋をされ軸部を有する方の腕部を回転させると、これに連動して他方の腕部も回転し、また、動きに連動して人形が音声を発する人形玩具とするものである。。
(もっと読む)
移動体の転倒防止装置及び移動体を支える方法並びにプログラム

【課題】 ヒューマノイドロボットを演技させる際に、その転倒を防止する。
【解決手段】 ワイヤを繰り出したり引き込むためのワイヤ伸縮機構1乃至3を備え、これらはそれぞれ異なる位置に設けられる。さらに、複数の前記ワイヤ伸縮機構からの複数のワイヤに接続された交点部と、前記交点部に設けられてその下方を撮影する撮像部51と、一端が前記交点部に接続され、他端が前記交点部の下方に位置する移動体に接続された移動体吊り上げ用ワイヤと、複数の前記ワイヤ伸縮機構を制御する制御部100とを備える。前記撮像部で撮影した前記移動体の画像に基づき前記移動体と前記撮像部の相対位置関係を求め、求めた相対位置関係に基づき複数の前記ワイヤ伸縮機構を駆動して、前記交点部を前記移動体の動きに追従させる。
(もっと読む)
コミュニケーションロボットシステムおよびロボット制御装置
【構成】 コミュニケーションロボットシステム10はコンピュータ20を含み、コンピュータ20は、モーションキャプチャシステム22から入力される人間14の3次元動作データを検出する。また、コンピュータ20はロボット12から入力される動作状態情報を検出する。同時刻における3次元動作データと動作状態情報とは、対応づけてDB24に記憶される。コンピュータ20は、現在の人間14の行動に対応する3次元動作データと類似する3次元動作データをDB24から検出し、検出した3次元動作データに対応して記憶される動作状態情報に含まれる行動をロボット12に実行させる。
【効果】 人間の行動からロボットの行動を引き出すことができ、飽きの来ないコミュニケーションを実現できる。
(もっと読む)
縫いぐるみ
【課題】コインを収容可能で且つ柔軟性のある縫いぐるみを提供することを課題とする。
【解決手段】柔軟性のある形象体を模して形成された縫いぐるみであって、前記縫いぐるみの口の部分にコインを投入可能な投入口と、前記縫いぐるみの内部に前記投入口から投入されたコインを収容する収容部で構成した。
(もっと読む)
リハビリ教育用患者模擬ロボット並びにリハビリ教育方法
【課題】実際の生身の患者に類似した応答を示し、リハビリの訓練・教育に適したリハビリ教育用患者模擬ロボットを提供することを目的とする。
【解決手段】コンピュータに予め症例に応じたリハビリの標準施術モードを入力しておき、回動可能な2部材接合により構成される関節が所定のトレーニングにより受ける荷重の変化を測定し、上記標準施術モードと比較して評価するようにした。これにより、リハビリのトレーニングを反復して行なえると共に、高度のリハビリ技術を短期間で習得できるものである。
(もっと読む)
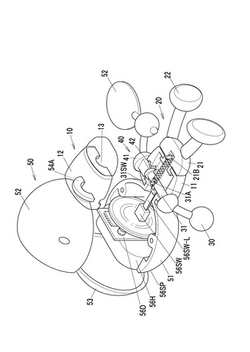
走行模型体
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車101と、台車101に固定された固定部材(42、43および30)と、固定部材に揺動可能に取り付けられた胴体部201と、胴体部201に揺動可能に取り付けられた脚部202R/Lおよび203R/Lと、胴体部201に中心を外して回転可能に保持された偏心カム(54fR、54rR、54fL、54rL)と、偏心カムの回転を第1リンクを介してそれぞれ脚部へ伝達する第1伝達部(55fR、55rR、55fL、55rL)と、偏心カムの回転を第1リンクと異なる第2リンク(56fR、56rR、56fL、56rLと、59fR、59rR、59fL、59rLの組み合わせ)を介して脚部へ伝達する第2伝達部とを有する。
(もっと読む)
自律移動ロボット
【課題】後方側に障害物等があっても確実に検出することができる自律移動ロボットを提供する。
【解決手段】ロボット1の頭部4に、前進移動方向側にある物体(障害物や移動体)を検出する2個のCCDカメラ7a,7bを設け、胴体部2の背面に取付けた格納部8の下側に、後進移動方向側にある物体(障害物や移動体)を検出する5個の超音波センサ9a〜9eを所定間隔で配置した。
(もっと読む)
走行模型体
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車(101)と、台車車(101)に固定された固定部材(42、43および30)と、固定部材(42、43および30)に揺動可能に取り付けられた胴体部(201)と、固定部材(42、43および30)に揺動可能に取り付けられると共に胴体部(201)と連係された首部(204)と、固定部材(42、43および30)に第1連結部材(80)を用いて揺動可能に連結されると共に首部(204)に揺動可能に取り付けられた頭部(205)とを有する。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に装着され、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵し、この人形の移動制御部と二輪車の走行制御が無線操縦による無線操縦式二輪車玩具において、人形の移動制御部は二輪車中央に搭載されて、人形を駆動する駆動部が人形胴体部に刻設された穴部に遊嵌する無線操縦式二輪車玩具を提供する。 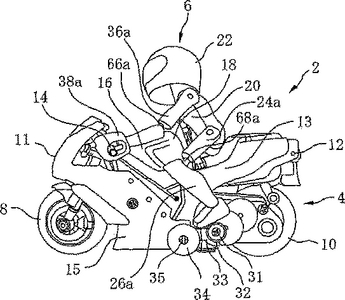 (もっと読む)
(もっと読む)
立体造形体
【課題】 本発明は、立体造形体に関し、別々のパターンのシート体から作られた複数の立体造形物を手早く、且つ、実用上支障のない程度にしっかりと連結し得る立体造形体を提供することを目的とする。
【解決手段】 シート状物を折り曲げて複数の立体造形物を形成し、これら複数の立体造形物の各々を連結手段によって連結して構成される一つの立体造形体を有し、前記連結手段は一方に多角形の抜き孔12を形成し、他方は前記抜き孔12の形状に相応する多角錐を形成すると共にこの多角錐には前記抜き孔12の角々近傍の内側に係合する係合片56、57、58、59、60を形成して立体造形体を構成する。
(もっと読む)
動く玩具付筆記具
【課題】本発明は、簡略操作にて長期にわたって支障なく動く玩具の筆記具頂部に対する着脱を繰り返すことができ、且つ、興趣に溢れた動く玩具付筆記具を提供する。
【解決手段】本発明の動く玩具付筆記具は、筆記部1を先端から出没させる構成の筆記具本体2と、載置面上を二足で歩行移動するゼンマイ駆動又は電動駆動の手振り式の二足移動玩具20と、筆記具本体2の頂部、二足移動玩具20の底部間にわたって設けたスライド嵌合式又はネジ込み式の着脱機構部とを有し、着脱機構部により筆記具本体2に二足移動玩具20を装着した状態と、筆記具本体2から二足移動玩具20を離脱させた状態との2種の形態をとり得るようにしたものである。
(もっと読む)
装飾容器
本発明は、容器としての機能を維持しつつ装飾が可能となるものであって、装飾を施しまたは装飾を変更し得る装飾容器を提供するとともに、容器に封入される内容物の有無または状態を判別できる装飾容器を提供することである。すなわち、外側表面の一部を凹状にしてなる凹状部(12)を有する容器本体(1)と、この容器本体に着脱可能に設けられた着脱部(2)と、この着脱部に設けられる装飾部(3)とで構成されたものである。そして、上記装飾部(3)は、着脱部(2)を上記容器本体(1)に装着したとき、上記凹状部(12)の内部に配置されるものである。これにより、容器本体(1)の内側に設けられた凹状部(12)に装飾部(3)を配置させることができ、装飾部(3)の有無に関係なく内容物を確認できる。また、着脱部(2)の着脱により当該装飾部(3)を容易に交換することができる。 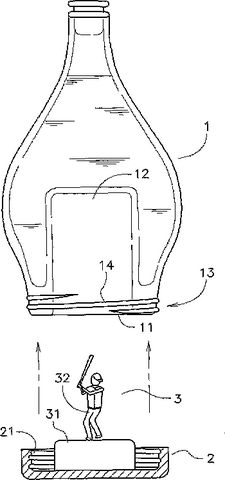 (もっと読む)
(もっと読む)
形象玩具
【課題】形象玩具であるにもかかわらず、玩具体を構成する構成部品の一部が文具で構成され、全体としては文具としてよりも玩具としての印象が強く、従来の文具玩具一体型のものとは差別化を図ることができる形象玩具を提供すること。
【解決手段】形象玩具は玩具本体1と、該玩具本体1に回動可能に取着された構成部品とから構成され、上記構成部品の少なくとも1つは文具Aと一体又は文具Aが着脱できるようにするとともに、上記形象玩具をロボットを模して形成し、上記玩具本体1をロボットの胴体部で構成し、上記構成部品をロボットの頭部2、腕部3、4及び脚部5、6で構成した。
(もっと読む)
脚式移動ロボットの制御装置
【課題】対象物を移動させる作業をロボットに行わせるための歩容を、将来のロボットと対象物との間の作用力が目標値からずれても、ロボットの姿勢の安定性を確保することができるようにロボットの歩容を生成する。
【解決手段】新たな目標歩容を生成するとき、将来の所定時点でロボット・対象物間の作用力の軌道が目標軌道と異なる軌道に変化したとして、該所定時点以後の目標歩容を生成した場合に所定の動力学的制約条件を満たすことができるか否かを判断する。満たすことができない場合には、対象物の移動計画を修正した上で、ロボット・対象物間の作用力の目標軌道などを再決定し、それを用いて新たな目標歩容を生成する。
(もっと読む)
サウンド玩具
【解決すべき課題】装置本体のいずれのポジションに載置しても、複数ある玩具体の各固有のダミー楽器を恰かも指揮者が居るかの如く完全に同期させ合奏させることができるようになしたアミューズメント性に優れたサウンド玩具を提供する。
【課題を解決するための手段】複数の玩具体1A〜1Hの当接部8に一対の接触端子9A,9Bを付設すると共に、当該接触端子に繋がるそれぞれ異なった抵抗値を有する抵抗器10を各玩具体に具備させる。装置本体をなす筐体2には音声記憶手段14、音声出力手段7、マイクロ・コントローラ15を具備させる。筐体2の載置面3には前記玩具体の接触端子9A,9Bに対応する一対の電極16A,16Bを複数個付設する。この電極に関連して複数個のIDセレクタ17A〜17Hを設けた。
(もっと読む)
歩行ロボット
【課題】 ジャイロセンサを用いて体幹の位置や姿勢を検出しながら歩行するロボットにおいて、特別な補強を施さないでも体幹の位置や姿勢の計測誤差を低減することができ、かつジャイロセンサの出力に基づいて体幹の位置や姿勢を演算するまでの計算量が少なくてすむ技術を提供する。
【解決手段】 本発明のロボットは、2以上の脚リンクを揺動させて歩行する。本発明のロボットは、2以上の脚リンクが揺動可能に連結されている腰と、その腰に対して回動可能に連結されている体幹と、その体幹の下端部に配置されているジャイロセンサを備えている。ジャイロセンサの計測点は体幹の回動軸上の位置に調整されており、ジャイロセンサは体幹の回動軸まわりの角速度に関する指標を計測する。
(もっと読む)
シリコンゴム製人形用眼球部品
【課題】
本発明は、ガラス玉やアクリル樹脂の特徴である透明性と表面の輝きを保ちながら、人間のような柔らかさを有し、かつ装着性に優れた弾力性のある人形用の眼球を提供する。
【解決手段】
本発明は、人形用の眼球であって、白目部分を形成する白色に着色されたシリコンゴム3、及び当該白色に着色されたシリコンゴムを覆う目の角膜部分に相当する透明なシリコンゴム2からなり、これらのシリコンゴムの硬度が、ショアA硬度で1〜50の範囲にあり、かつ白色に着色されたシリコンゴムのショアA硬度が透明なシリコンゴムのショアA硬度よりも小さいことを特徴とする人形用眼球、その製造方法、及びその人形用眼球が装着されてなる人形に関する。
(もっと読む)
人形の脚部構造及び該脚部構造を備える人形
【課題】 胡座のポーズをはじめとするより多様なポーズを再現でき、かつ、いずれのポーズをとった際にも見栄えが美しい人形の脚部構造を提供する。
【解決手段】 人形の脚を構成する脚部が複数の部材に分割されており、爪先側先端に位置付けられる部材以外の他の部材には互いに連通する中空が設けられており、爪先側先端に位置付けられる部材から伸びる弾性体を他の部材の中空へ通して牽引することによって各部材を圧接状態にて連結してなる人形の脚部構造において、前記他の部材における人形の大腿を構成する部材が脚幅方向に切断し、切断面を対面させて隣り合う両部材を該切断面から垂直に伸びる軸を回転軸として回転させる。
(もっと読む)
動作玩具
【課題】オルゴールに設けられたゼンマイを動力とし、オルゴールの回転軸に多層カムやカム付き冠歯車を備えることによって、オルゴールを正常に鳴奏させると共に、玩具に種々の動作を行わせることができる動作玩具を提供することを課題とする。
【解決手段】ゼンマイを用いたオルゴールを有する動作玩具であって、前記オルゴールの回転軸に軸着した冠歯車とカムで形成されたカム付き冠歯車と、前記カムと係合する複数の継手と、前記冠歯車と係合する歯車と、前記各継手及び各々歯車と係合する複数の動作部を設けて構成した。
(もっと読む)
移動ロボット
【課題】重心が高い位置にもかかわらず急発進または急停止した場合に転倒することを防止する。
【解決手段】移動ロボットが、自装置を移動させるための駆動を行う移動機構部と、移動機構部との間の平面上の方向にリニアガイドにより移動可能に移動機構部と連接されている筐体部と、移動機構部と筐体部の間に設けられ、リニアガイドにより案内される平面上の方向における、移動制御により生じる慣性力または外力を吸収する緩衝器と、を備えた。
(もっと読む)
381 - 400 / 464
[ Back to top ]