
Fターム[2C150CA01]の内容
Fターム[2C150CA01]に分類される特許
401 - 420 / 464
電気教育用セット
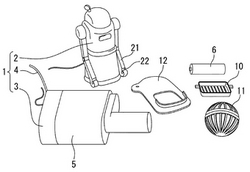
【課題】 この発明は、子供の電気に対する関心を喚起するための教育用玩具を提供することを課題とする。
【解決手段】 この発明の電気教育用セットは、電気によって作動し、乾電池ホルダー3を備えた電気作動体1と、前記乾電池ホルダー3に装着可能な手動発電機5とを組み合わせて構成し、乾電池6と手動発電機5とを任意に交換できるようにしたものである。この発明で使用される手動発電機5の出力部分の形状は、乾電池の代わりに乾電池ホルダー3に装着可能な形状とし、乾電池ホルダー3には乾電池6と手動発電機5との何れかを自由に装着することができるようにする。
(もっと読む)
動作玩具

【課題】オルゴールに設けられたゼンマイを動力とし、オルゴールの回転軸に多層カムやカム付き冠歯車を備えることによって、オルゴールを正常に鳴奏させると共に、玩具に種々の動作を行わせることができる動作玩具を提供することを課題とする。
【解決手段】ゼンマイを用いたオルゴールを有する動作玩具であって、前記オルゴールの回転軸に軸着した冠歯車とカムで形成されたカム付き冠歯車と、前記カムと係合する複数の継手と、前記冠歯車と係合する歯車と、前記各継手及び各々歯車と係合する複数の動作部を設けて構成した。
(もっと読む)
ロボット装置およびロボット装置システム
【課題】 特定の話者が音声を発する際の癖を表現することにより、話者が伝達しようとする情報を、聴衆に正確に理解させることができるロボット装置を提供する。
【解決手段】 人体各部分の動きと同様の動きを起こさせるアクチュエータ群13と、音声を発するスピーカ12とを備えたロボット装置10であって、入力された文章の各語句について音声合成部33により合成された音声をスピーカ12から発するとともに、その語句が語句/癖対応データベース34に登録されている場合に、その語句に対応する癖データに記憶された人体各部の動きを形体癖模写部35により模写させて音声と動きとを同期させる。
(もっと読む)
ロボット用人工皮膚
【課題】引張りに対する耐久性に優れるロボット用人工皮膚を提供する。また、顔の表情が変化する顔ロボットに用いられた場合に、人間のように自然な表情を作り出すことができるロボット用人工皮膚を提供する。
【解決手段】人工皮膚10は、ほぼ全面に補強布22が埋設されたゴム基材20から構成されている。補強布22の表面側には、小面積の補強布24が止め布として補強布22に重ねて埋設されている。糸状部材26は、リング部材16を補強布22及び補強布24に留め付けるように、補強布22、補強布24、及びリング部材16の孔を複数回貫通し、リング部材16に複数回(図3では3回)巻回されている。また、糸状部材26は、ゴム基材20の外表面に突出しないように巻回されている。このようにリング部材16を補強布22及び補強布24に留め付けることで、リング部材16が人工皮膚10のゴム基材20の裏面にしっかりと取付けられている。
(もっと読む)
関節人形
【課題】 膝関節を屈曲したときに膝蓋靭帯に相当する部位に隙間ができず、人体に近い自然な印象を与えることのできる関節人形の提供。
【解決手段】 胴体に各関節を介して頭部と上肢と下肢とを設けて構成される関節人形であって、前記下肢は、左右足部品(24、23)と、左右脚部品(22、21)と、前記左右脚部品と左右大腿部品(102、101)とを接続する膝関節とから組み付けられ、前記膝関節は、前記左右脚部品と前記左右大腿部品とが略直線的になる直立状態と、略直角に曲げられる屈曲状態の範囲で回動可能に軸支する軸支部と、前記屈曲状態にされたときに、前記左右大腿部品に形成される凹部(20k、18k、17k、19k)を内側から覆うために前記軸支部の前方を支点として回動可能に設けられる膝形状部品(30)とから構成される。
(もっと読む)
音声情報生成装置、その方法、そのプログラム、そのプログラムを記録した記録媒体、音声情報のデータ構造、音声情報を記録した記録媒体、音声出力制御装置、および、そのシステム
【課題】 外部からの音に応じて良好に音声を出力させる音声出力装置を提供する。
【解決手段】 外部音を集音して取得した外部音データの音量に基づき、無音部分で外部音データから音声セグメント情報を分割する。音声セグメント情報をテキスト形式に変換して言語解析し、一言となる音声セグメント情報を音声データとする。音声データの前に位置する音声セグメント情報中の語句と音声データの語句との関連度合いを、経過時間が長くかつ語句の数が多くなるに従って小さくなるスコア値に設定し関連度情報を生成する。音声データに語句情報および関連度情報を関連付けて1つの音声情報を生成する。外部音データ中に、音声情報の語句情報と同一の語句を認識すると、この語句情報の音声情報を検索し、無音期間が1〜2秒以上経過した際、最も高いスコア値となる関連度情報の音声情報の音声データを音声出力する。
(もっと読む)
球体発射玩具
【課題】単純な構造でありながら玩具から発射された球体の動作態様を変化に富んだ動作態様にすることができるとともに、玩具の小型化を図ることができる球体発射玩具を提供すること。
【解決手段】弾き片3a、3b間に収容した球体Bを押し出し部材4で押し出して玩具本体Aの前部に設けられた発射口2から前方に弾き出す球体発射玩具において、上記球体Bを少なくとも2種類の素材を組み合わせて構成し、構成する素材の1つを、他の素材よりも重い素材で構成した。
(もっと読む)
移動式ロボット
【課題】 複数の動作指示部から視認に適したものを選択して、選択された動作指示部の指示に従って動作を変更する移動ロボットにおいて、動作指示部を切換える首振り動作を自然で滑らかな動作で実現することが可能な技術を提供する。
【解決手段】 視認する動作指示部を切換える際に、頭部の回転の速度の時系列を設定して、その頭部の回転の速度の時系列に基づいて頭部を回転させるアクチュエータを駆動する。アクチュエータを駆動している間も、目標とする頭部の回転角を逐次計算して、頭部の回転の速度の時系列を逐次更新する。
(もっと読む)
型板組合せの造形構造
新しい造形美を有し、着衣せずとも観賞に堪えうるマネキンを形成可能な型板組合せの造形構造を提供するために、型板組合せの造形構造は、端縁に切欠溝を形成した水平型板と、多段に配した水平型板を一定間隔を保持して上下に保形するために、端縁に切欠溝を形成した連結型板と、多段に配した水平型板を一定間隔を保持して上下に保形するために、端緑に切欠溝を形成すると共に、水平型板の上下方向に突出片を形成した縦型板と、連結型板や縦型板を保形するために、端緑に切欠溝を形成した連結補助型板とよりなることとした。  (もっと読む)
(もっと読む)
人形の骨格構造及び該人形
【課題】 人形の腕部位或いは脚部位を関節位置で深く屈曲させても屈曲姿勢を維持することができる人形の骨格構造を提供する。
【解決手段】 人体の腕又は脚を構成する両端部に関節を有する骨格を模した人形の骨格構造において、前記人形の骨格中間部に該骨格を屈曲させて分割する前記人体の腕及び脚には無い中間関節部を設け、当該中間関節部を骨格の分割面に形成された相対して当接する関節面部と当該両関節面部を接触・離反させる枢軸部と当該両関節面部の離反を所定角度で停止させる当該枢軸部に回動可能に軸着された係止部とからなる構成とした人形の骨格構造。
(もっと読む)
人形玩具の骨格構造及び当該連結構造を備えた骨格部材並びに当該骨格部材を外皮部材によって被覆した人形玩具
【課題】 ボールジョイント方式の連結構造を採用した骨格部材に近い可動範囲を有し、また、パーツを交換したり、新たなパーツを追加することなく、同じパーツを用いながら異なる体格に変形させることができる人形玩具の骨格構造を提供する。
【解決手段】 隣り合う骨格パーツが連結パーツを介して連結される人形玩具の骨格構造において、前記隣り合う骨格パーツに対してそれぞれ前記連結パーツを挟むことができる間隔を空けて伸びる一対の支持片を設け、当該連結パーツを当該一方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めすると共に、当該他方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めし、当該連結パーツの当該一方の骨格パーツに対する回転の軸と当該他方の骨格パーツに対する回転の軸とがねじれの位置となるようにする。
(もっと読む)
ロボット装置及びその動作制御方法
【課題】 ユーザ等のコミュニケーション対象をより飽きさせることのないカオス的な動作を自身の身体性に基づいて発現することが可能なロボット装置及びその動作制御方法を提供する。
【解決手段】 自己モーション算出器12は、全関節角の時系列情報に基づいて、自身の動作のみに由来する動きベクトルを算出する。モーション混合器13は、この自身の動作のみに由来する動きベクトルに基づいて入力画像の動きベクトルを補正することで、自身の動作のみに由来する動きベクトルとユーザの動作のみに由来する動きベクトルとが所望の比率で混合された動きベクトルを生成する。そしてBR抽出器14は、生成された動きベクトル等から動き特徴量を抽出し、動作生成器15は、動作ルールベース記憶器16に記憶された動作ルールベースを参照しながら、抽出された動き特徴量に応じた動作を生成する。
(もっと読む)
人形玩具の足部構造及び当該足部構造を備える人形玩具
【課題】 平坦な床面において安定した状態で自立させることができる人形玩具の足部構造を提供する。
【解決手段】 人形玩具の足裏を形成する足底部及び人形玩具の足関節を形成する足関節部によって構成される足首骨格部材と該足首骨格部材を被覆する足首外皮部材とからなる足部を有する一対の脚部を備えた人形玩具の足部構造において、前記足部の足首骨格部材を構成する足底部の足裏面に対して踵側に突起部を設けると共に爪先側に対して足幅方向に分かれた少なくとも二つの突起部を設け、足首外皮部材の足裏面に足首骨格部材の足底部に設けられた突起部が密着することによって足首外皮部材の足裏面形状が足首骨格部材の足底部に設けられた突起部に合わせて凹凸状に変形するように構成する。
(もっと読む)
バイクアクセサリー
【課題】バイクアクセサリー、いわゆる二輪車のアクセサリーに於いて、走行中の旋回時に起こる傾きを再現し、臨場感の有る雰囲気を得ようとするものである。
【解決手段】自動車の旋回時に発生する、遠心力を利用し重りを移動させ、この時の力で人形を傾ける構造としたものである。
(もっと読む)
風水による販売方法
【課題】 本発明は、風水に関連して販売する販売方法を提供する。
【解決手段】 収納箱を風水に関連する色とし、且つ、風水に関する説明書を添付して販売することによって、販売促進となる。
(もっと読む)
対話型玩具
【課題】多数の反応データの有効活用が可能な対話型玩具を提供すること。
【解決手段】外部刺激を入力するための刺激入力装置と、多数の反応データを記憶する記憶装置と、前記記憶装置から前記反応データを読み出して反応装置に所定の反応を行わせる処理装置とを備える対話型玩具において、複数の評価レベルが設定されると共に前記反応データが複数のグループに分類され、さらに、各評価レベルで前記グループの出現確率が設定され、前記外部刺激の量又は質の評価結果に応じて評価レベルが可逆的に変更できるように構成され、その時々の評価レベルに応じた反応を行うように構成されている。
(もっと読む)
うでを前に伸ばしてひざを曲げた姿勢の人形
【課題】 従来の人形は生産工程が複雑な割りに楽しみ方の幅のせまいものであった。
【解決手段】 うでを前に伸ばしてひざを曲げた姿勢をとらせる事によ立体的な量感と豊かな表情を持たせる事が可能になり設置する向きを変えても破綻なく成立する人形となる。
頭や両手両足に加えひざやお尻など様々な接地の仕方により多くの姿勢をとらせる事が可能となりパズルゲームのコマやサイコロとして幅広い楽しみ方を実現する。
生産性も高い上印刷や塗装により更にキャラクター性を付加する事も可能であり高い商品価値を持つ人形である。
(もっと読む)
脚式移動ロボットの力センサ異常検知装置
【課題】床反力を検出する力センサの異常を精度良く検知するようにした脚式移動ロボットの力センサ異常検知装置を提供する。
【解決手段】脚式移動ロボットにおいて、ロボットを起動させるときに足踏み動作を行なうようにロボットの動作を制御し(S104)、足踏み動作のときの力センサの出力が所定の範囲内にあるか否か判定し(S106,S108,S110,S112,S114)、その判定結果に基づいて力センサの異常を検知する(S102)。
(もっと読む)
脚式移動ロボット
【課題】足部に帯電する静電気を効果的に放電して除去するようにした脚式移動ロボットを提供する。
【解決手段】基体と、2本の脚部と、そのそれぞれの先端に足関節を介して連結される足部22と、足部22と脚部の間に配置されて足関節を駆動する電動モータ20と、足部と脚部の間に配置されて足部22が接地する床面Fから作用する床反力を検出する6軸力センサ56とを少なくとも備えると共に、足部22に床面と接地するときの衝撃を緩衝する緩衝部材224を備えてなる脚式移動ロボットにおいて、足部22の緩衝部材224に導電部材226を設ける。
(もっと読む)
転回移動玩具
【課題】緩急のある興趣性に富んだ転回動作を行なうことができる転回移動玩具を提供する。
【解決手段】内部に左右方向に蛇行する重錘球転動路4が設けられた胴体1と、胴体1の頭側の腕枢支部10に枢支された左右の腕体11と、胴体1の尻側の脚枢支部20に枢支された左右の脚体21と、胴体1の重錘球転動路4内に転がり移動可能に収容された重錘球7とを備えた。
(もっと読む)
401 - 420 / 464
[ Back to top ]