
Fターム[2D015GA03]の内容
Fターム[2D015GA03]に分類される特許
1 - 20 / 306
作業機の干渉防止装置
【課題】作業機のキャブとアタッチメントが接近したときに干渉しないように、アタッチメントを動かすアクチュエータの作動速度を制限し減速させる干渉防止装置において、制限を解除するスイッチをONにしたときに作動速度の上限値を自由に設定できるようにする。
【解決手段】アクチュエータの作動速度を、アタッチメントとキャブの間に設定した減速開始線と停止線との間の減速域で上限値を制限するコントローラと、コントローラによるアクチュエータの減速制限を解除する制限解除スイッチを備え、制限解除スイッチは、その操作量に応じた信号をコントローラに出力する比例出力スイッチであり、コントローラは、この出力信号に応じて制限解除時のアクチュエータの作動速度の上限値を設定する。
(もっと読む)
キャブおよび建設機械

【課題】コストの大幅な増大を回避しつつ外部からGPS受信機が容易に視認できない建設機械のキャブを提供する。
【解決手段】GPS受信機70を支持する支持部材60を設け、支持部材60を天井20に設けられた非金属製の天窓26と前窓34の回動軌跡との間に配置するとともに、支持部材60により、GPS受信部73の少なくとも一部と天窓26とが平面視で重複してGPS受信機70のうちこのGPS受信部73の少なくとも一部が配置された部分の上方に天窓26のみが存在する位置に、GPS受信機70を支持する。
(もっと読む)
作業機械
【課題】角度検出器の破損を防止でき、しかも、アタッチメント姿勢を正確に演算することができる作業機械を提供する。
【解決手段】係合ピン(15)と第2連結ピン(22)と第4連結ピン(24)とを直線で結んで形成される三角形の内角のうち、係合ピンを頂点とする内角θ1を検出する角度検出手段(16)と、油圧シリンダ(9)のストローク位置が、前記三角形の第4連結ピンを頂点とする内角θ2が90度となる閾値より伸長側にあるか、それとも収縮側にあるかを判定するシリンダ駆動方向判定手段(31)と、前記内角θ1と、前記シリンダ駆動方向判定手段の判定結果とに基づいて、第1連結ピンと第2連結ピンと第3連結ピンと第4連結ピンとを直線で結んで形成される四角形の内角のうち、第1連結ピンを頂点とする内角θATTを演算するアタッチメント姿勢角度演算手段(32)とを備えている。
(もっと読む)
昇降式キャブを有する作業機械の安全装置
【課題】 昇降式キャブを備えた各種作業機械に対して好適に適用することができ、キャブが上昇位置にあるときにキャブのドアが開けられたことを運転者に注意喚起でき、キャブからの転落を防止できる昇降式キャブを有する作業機械の安全装置を提供する。
【解決手段】 キャブ内に標準装備のロック手段とは別にドアロック手段を設け、ドアロック手段によるロック状態をロック検出センサにより検出する。キャブが乗降可能高さ位置よりも高い位置に居たときにドアロック手段によるロック状態が解除されると、警報灯等を用いた警報手段により警報を報知する。これにより、高い位置にあるキャブからの転落を防止できる。
(もっと読む)
油圧ショベル
【課題】運転者の意図しないアクチュエータの動きを確実に防止することで、従来よりもさらに安全性を向上させることが可能な油圧ショベルの安全装置を提供する。
【解決手段】油圧ショベル1の安全装置50では、ロック弁43とパイロット弁41との間に、運転者による遮断スイッチ29の手動操作によって操作される切替弁42が設けられている。ロックレバー25が非ロック位置にあり、操作レバー21,22が操作位置にあり、かつ運転者が手動で遮断スイッチ29を操作して切替弁42をON状態へ移行させた場合に、作業機4等のアクチュエータが作動可能な状態となる。
(もっと読む)
作業機械
【課題】作業機械の走行時かつキャブが上昇位置の時のキャブの振動を抑制する。
【解決手段】作業機械1は、作業機械本体10と、作業機械本体10に変位可能に搭載されたキャブ15と、作業機械本体10とキャブ15とを連結して最下位置および上昇位置にキャブ15を変位させるキャブ昇降装置20と、作業機械本体10に対するキャブ15の位置を検出する位置検出器80と、作業機械本体10に設けられて作業機械本体10を走行させる走行モータ25とを備える。また、作業機械1は、キャブ15が上昇位置であることを位置検出器80が検出した時に(ステップS1)、走行モータ25の回転速度の最大値を制限するコントローラ90(速度制限手段)を備える。
(もっと読む)
建設機械
【課題】キャブを旋回フレームに対してチルトアップ可能とする構造を備えた建設機械において、作業員が気付かずにキャブのチルトアップを続けてキャブとフロント作業機が接触することを防止する。
【解決手段】コントローラ85は、キャブ7の上下方向の傾転を検出する第1及び第2ロータリスイッチ36,136とブーム17の上下方向の回転を検出する第3ロータリスイッチ80の出力信号を入力し、キャブ7をメンテナンス作業に適した所定角度まで傾転させた場合にキャブ7とブーム17が接触する可能性のある回動角度にブーム17が位置する状態でキャブ7の上方への傾転を開始したときは、第1報知信号を出力してブザー86を第1の態様で作動させ、キャブ7がメンテナンス作業に適した所定角度まで傾転したときは、第2報知信号を出力してブザー86を第2の態様で作動させる。
(もっと読む)
作業機械の操作装置
【課題】
複数の操作レバーを備えた作業機械において、操作性を損なうことなく、操作者の意図しない操作レバーの誤操作を防止する。
【解決手段】
作業機械には、1対の走行体と、少なくとも1個の作業フロントと、操作者が搭乗するキャブが備えられており、キャブ内には操作装置50a、50bが配置されている。操作装置は、作業フロントと下部走行体とで構成されるアクチュエータ群の中のいずれかのアクチュエータを操作する第1の操作レバー300a、300bと、第1の操作レバーが操作するアクチュエータを除いたアクチュエータ中のいずれかのアクチュエータを操作する第2の操作レバー54a、54bとを有している。第1の操作レバーが操作中であると判断したときに第2の操作レバーの不感帯を第1の操作レバーの不感帯より大きくする制御装置400を設けた。
(もっと読む)
周囲監視装置
【課題】 作業機械の周囲で作業する各作業者に送受信器を所持させることなく、作業機械の操作者に作業者を容易に認識させることができる安価な周囲監視装置を提供するものである。
【解決手段】 周囲監視装置100は、ヘルメット300の表面に付されるマーカ10と、油圧ショベル200の周囲を撮影する撮影手段20と、撮影手段20により撮影された撮影領域を撮影画像として表示する表示手段30と、表示手段30に表示される撮影画像における、撮影手段20から所定の距離内にあるマーカ10に対して、仮想物体1を重畳して合成画像を生成する合成画像生成手段40と、を備える。
(もっと読む)
無人走行車両の走行禁止領域設定システム及び無人走行車両の走行禁止領域設定用コンピュータプログラム
【課題】電源から機器へ電力を供給するケーブルを車両が踏まないようにするために、車両の走行を禁止する領域を設定するにあたって、車両が走行可能な領域を大きくすること。
【解決手段】管理装置10は、例えば、鉱山の採掘場を走行する車両の走行を禁止する走行禁止領域を設定する。管理装置10は、ケーブル位置推定部12Aと、禁止領域設定部12Bとを含む。ケーブル位置推定部12Aは、電源からケーブルを介して電力の供給を受ける電気式作業機械と前記ケーブルを支持する支持体との間における少なくとも二箇所の位置情報と、前記電気式作業機械と前記支持体との間のケーブルの長さと、前記電気式作業機械の位置に関する情報とに少なくとも基づいて、前記ケーブルの位置を推定する。禁止領域設定部12Bは、前記ケーブル位置推定部12Aが推定した前記ケーブルの位置に基づいて、車両の走行を禁止する走行禁止領域として設定する。
(もっと読む)
建設機械の作業部材の異常変位検出装置
【課題】ブームやアーム等の作業部材の異常変位を自動的に、かつ、確実に検出する。
【解決手段】作業アタッチメントを構成する作業部材としてのブーム5の基端部にレーザ発信機14A、先端部に受光部15Aを設けて変位測定装置16Aを構成し、コントローラ17Aにより、作業アタッチメントが無負荷状態であることを条件として、変位測定装置16Aからの変位信号に基づいてブーム5の異常変位を判断し、警報器18を作動させるように構成した。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
放射線測定器を備えた作業機械
【課題】運転者を放射線被曝から保護しつつ、効率的な作業を行うことが可能な作業機械を提供する。
【解決手段】油圧ショベルを構成する上部旋回体2の上面、フロントアクチュエータ機構3を構成するアーム7の先端部分、及びキャブ5内に放射線測定器21,22,23を設置する。キャブ5内にモニタ装置11を備え、放射線測定器21,22,23の検出データ等をモニタリングする。また、キャブ5内にアラーム装置12を備え、放射線測定器21,22,23の検出データが所定値に達したとき、運転者に警報を発する。さらには、無線通信端末14とGPSユニット15とを備え、放射線測定器21,22,23の検出データとGPSユニット15にて検出された油圧ショベルの現在位置データとを、無線通信端末14を介して外部装置に無線通信する。
(もっと読む)
建設車両周辺の作業者検出装置
【課題】カメラ画像と距離センサーを併用し、作業者であることをと建設機械からの距離を同時に認識することができるとともに、センサーが作業者に向いていない場合の誤認識を無くして、比較的簡易な装置で、正確な検知を行うことがでる建設車両周辺の作業者検出装置を提供する。
【解決手段】建設機械の周辺の広域画像を得るため複数台を並べて配置して工事車両周辺の画像を撮影しパソコンに送るカメラ1と、工事車周辺のものまでの距離を測定し、パソコンに送るレーザー距離計2と、カメラとレーザー距離計の3次元姿勢を測定し、パソコン4に送る3次元姿勢センサー3と、データの処理、危険の判断、警告の発令、モニターへの表示を行うパソコン4とからなる。
(もっと読む)
自走式作業機械の制御装置
【課題】 自走式作業機械の走行体と旋回体を停止した後その停止状態を解除しても不都合を生じさせない制御装置を提供する。
【解決手段】 給電ケーブルの張力が第1閾値を超えた時に下部走行体の走行方向が検出されていないときは、走行が禁止される(STEP4、5)。給電ケーブルの張力が第1閾値を超えたときに下部走行体の走行方向が検出されている場合には、走行方向への走行が停止かつ禁止され、下部走行体の反対方向の走行が許容される(STEP6〜8、STEP12〜14)。上部旋回体についても下部走行体と同様に、上部旋回体の旋回方向が検出されていないときは旋回が禁止され(STEP16、17)、上部旋回体の旋回方向が検出されている場合には、旋回方向への旋回が停止かつ禁止され、上部旋回体の反対方向の旋回が許容される(STEP18〜20)。
(もっと読む)
蓄電装置及びハイブリッド建設機械
【課題】電力を断続するスイッチの異常時にも安全に制御を行う蓄電装置の制御装置を提供する。
【解決手段】
蓄電部(101)と、蓄電回路(100)と、電流制限素子(122)を有する第1スイッチ(121)及び第2スイッチ(123)とを備え、第1スイッチ(121)及び第2スイッチ(122)によって蓄電部(101)の電力の入出力を断続するスイッチ回路(102)と、コンデンサ(104)と、を備える蓄電装置(26)であって、蓄電部への電力の入出力を投入するときに、第1スイッチ(121)を投入し、コンデンサ(104)が充電された後に第2スイッチ(123)を投入し、第2スイッチ(123)を投入した後も、第1スイッチ(121)の投入を維持する。
(もっと読む)
建設工事誘導管理システム
【課題】建設工事現場全体を撮影手段で撮影した画像情報を基に、作業エリア、搬送路エリア、搬送車両エリア、進入禁止エリア、重機エリア等に分け、且つ建設車両等を識別し、識別した車両を指定した場所まで誘導する建設工事誘導管理システムを提供。
【解決手段】建設工事誘導管理システムは、該現場ヤード13全体を撮影することができる撮影手段11と、撮影手段11で撮影した画像情報を基に建設工事を行う作業エリアを設定する作業エリア設定手段と、撮影手段11で撮影した画像情報を基に前記作業エリア内で搬送車両が走行する搬送路エリアを設定する搬送路エリア設定手段と、撮影手段11で撮影した画像情報を基に前記作業エリア内で搬送車両を捉えて搬送車両エリアを設定する搬送車両エリア設定手段と、撮影手段11で撮影した画像情報を基に前記作業エリア内で重機の輪郭を捉えて重機ターゲットの緩衝エリアを設定する重機エリア設定手段とを備える。
(もっと読む)
安全管理システム
【課題】撮影手段で建設工事領域を全て撮影するようにし、該撮影して得られた映像を専用ソフトで処理して、建設機械のエリア、及び作業員のエリアを特定し、これらエリア同士が接触したとき或は作業エリアから逸脱した場合には警報を発してターゲット同士の接触を防止するシステムを提供する。
【解決手段】安全管理システムは、建設工事現場よりも高所に設置され建設工事現場全体を撮影することができる撮影手段11と、前記撮影手段で撮影した映像から建設工事を行う作業エリアを設定する作業エリア設定手段18と、前記撮影手段11で撮影した映像から前記作業エリア内の建設機械及び作業員の輪郭を捉えてターゲットのエリアを設定するターゲットエリア設定手段19と、前記設定されたターゲットのエリアが互いに接触したとき或は前記作業エリアから逸脱したときに報知する報知手段21と、を備えたことである。
(もっと読む)
建設機械
【課題】簡易な回路構成で絶縁抵抗劣化検知、リレーの故障診断、自己異常診断の全てを行う絶縁抵抗劣化検知システムを備えた建設機械を提供する。
【解決手段】電動システムを備えた建設機械において、電動システムは、第1の電圧波形発生装置100Aと、リレー56に対して蓄電デバイス59側と第1の電圧波形発生装置に接続され、第1の電圧波形発生装置から入力された波形の変化を測定することにより蓄電デバイス側の絶縁抵抗劣化を検知する第1の検知部99Aとを有する第1絶縁抵抗劣化検知装置90Aと、第2の電圧波形発生装置100Bと、リレー56に対して駆動システム55側と第2の電圧波形発生装置に接続され、第2の電圧波形発生装置から入力された波形の変化を測定することにより駆動システム側の絶縁抵抗劣化を検知する第2の検知部99Bとを有する第2絶縁抵抗劣化検知装置90Bとを備えた。
(もっと読む)
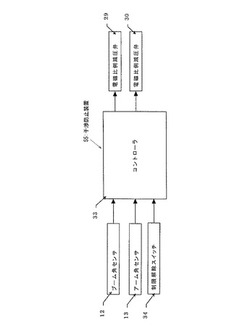
作業機
【課題】警告情報の発生の有無を簡単に把握することができると共に警告情報の消去時期を簡単に特定することができるようにする。
【解決手段】異常であるか否かを判断し且つ異常であるときに警告を発生する警告発生手段55と、警告に関する警告情報を記憶する警告記憶手段56と、警告記憶手段56に記憶された警告情報を表示する表示手段と、警告情報を消去する警告消去手段57とを備え、警告消去手段57によって警告情報を消去した消去時期を記憶する消去時期記憶手段58を備えている。
(もっと読む)
1 - 20 / 306
[ Back to top ]