
Fターム[2D129CB13]の内容
Fターム[2D129CB13]に分類される特許
61 - 73 / 73
油圧拡大ヘッド制御装置
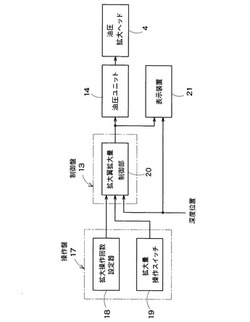
【課題】作業員の技量や経験如何にかかわらず、拡大球根部造成用の拡大穴を適正且つ容易に形成する。
【解決手段】作業員Mが、拡大掘削回数設定器18により、拡大掘削回数をN回と設定する。すると、拡大翼拡大量制御部20は、N回目の拡大掘削における最大拡大量をαとした場合に、第1段階での拡大量が(1/N)・α、第2段階での拡大量が(2/N)・α、第3段階での拡大量が(3/N)・α、第N段階での拡大量が(N/N)・α(=α)となるように、各段階での拡大量を演算して制御信号を油圧ユニット14に出力する。油圧ユニット14は、この制御信号に基づき拡大翼の拡大量を制御する。
(もっと読む)
掘削機

【課題】掘削フレームの引抜作業時において、地上での土砂の飛散を確実に防止することができる掘削機を提供すること。
【解決手段】掘削体6に設けられ、掘削チェーン17を掘削フレーム19〜21の軸線回りに取り囲むカバー体8を備え、このカバー体8は、掘削体6に固定された基部カバー24と、この基部カバー24の外側の領域を通って当該基部カバー24に対し前記軸線に相対変位自在に装着された延長カバー25、26とを有し、延長カバー25、26は、掘削体6がベースマシン2に対し最も上昇した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む延長姿勢と、掘削体6がベースマシン2に対し最も下降した状態において地表から露出する掘削チェーン17を前記軸線回りに取り囲む短縮姿勢との間で伸縮自在に構成されている。
(もっと読む)
地層探査方法及び同装置
【課題】掘削深度を決定するための地層データを正確に得ることができ、しかも工期を短縮し、工費及び設備コストを安くする。
【解決手段】カッターポスト5に掘削刃付きのチェーン8を上下方向にエンドレス状に架け渡して掘削装置4を構成する。この掘削装置4によって地中に溝Gを掘削し、その掘進過程の要所で、地層を探査するセンサを備えたセンサユニット9を掘削装置4のチェーン8に取付け、この状態で掘削された溝G内でチェーン8を低速で回転させることにより、センサを溝Gの壁面に沿って移動させて地層を探査する方法及び装置。
(もっと読む)
孔拡張部の形成方法及び孔拡張部切削装置
【課題】
木材等の建築用構成部材を接合するための表面に露出しない接合構造を構成する孔の内部の所要箇所に孔拡張部を設ける作業において、特に熟練していない作業者でも、容易かつ迅速に孔拡張部を所要の形状に均一につくることができる装置を提供する。
【解決手段】
孔拡張部切削装置C1は、孔90に本質的に隙間なく挿入できる挿入体1と、挿入体1に収められ、回転力を付与することができる回転軸2と、回転軸2に、挿入体1の外周面より外側へ張り出し可能及び内側へ収容可能に設けられた切削具3とを備えており、孔90に挿入体1を挿入した状態で回転軸2に回転力を付与し、切削具3を遠心力で挿入体1の外周面より外側へ張り出させ、孔より径大の孔拡張部91を形成することができるものである。
(もっと読む)
工具状態監視システム
本発明は、少なくとも1個の幾何学的に定義されたブレードとともに作動中に回転する工具要素2、具体的には、材料切削工具要素2を備える工具1に関する。上述工具要素2は作動状態で作動パラメータの影響を受けやすい。測定装置3は、作動パラメータの測定及び作動パラメータの測定信号への変換のために備えられる。第1の測定装置3、31は、本質的に第1の工具要素2、21に対する第1の作動パラメータだけが第1の測定装置3、31によって記録されることができるように作動状態で第1の工具要素2、21と協働する。 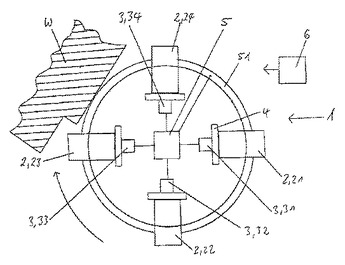 (もっと読む)
(もっと読む)
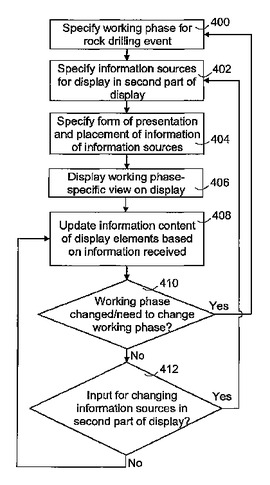
削岩装置用の適応ユーザインタフェース
本発明は、削岩装置を用いて行われる多段階削岩作業を制御する制御装置に関する。削岩装置またはその制御ユニットのディスプレイでは、第1の部分が、実質的に一定の情報源用に設定でき、第2の部分が、削岩状況に応じて切り換えられる情報源用に設定できて、それに関連した情報が前記削岩状況時に表示される、少なくとも1つの情報源に関して、削岩状況を特定するように、定義が制御装置にセットされる。削岩作業の作業段階を照合し(400)、前記定義に基づいて前記段階に適した情報源を選択する(402)。削岩段階の実行中に、少なくとも1つの選択した情報源に関連した情報を前記表示部分に表示する(406)。
 (もっと読む)
(もっと読む)
作業車の穴掘り装置
【課題】 本発明の課題は、穴掘り作業と同時に、穴掘り後の穴に肥料を散布して作業の省力化を図ることにある。
【解決手段】 本発明は、作業車後部に設けられた昇降アーム(10)の先端に、所定の穴を掘削するホールディガー(12)を装備し、このホールディガー(12)には穴掘り後の穴に施肥する施肥装置(20)の施肥供給口(21)を設けてあることを特徴とする。また、ホールディガー(12)による穴掘り深さが所定量に達すると、それを感知するセンサ(26)を設け、このセンサ(26)の検出結果に基づき施肥繰出モータ(23)を駆動するように連動構成してなる。
(もっと読む)
施工機用ロッド支持装置
【課題】 掴み換えの際にロッドを確実に把持して固定することができ、また、施工時のロッドのガイドも確実に行うことができる施工機用ロッド支持装置を提供する。
【解決手段】 施工機11に立設したリーダ13にロッド15を回転駆動する駆動装置14を昇降可能に設け、前記リーダ13の下部に前記ロッド15を回転可能かつ摺動可能に支持するロッド振止手段21を設けた施工機におけるロッド支持装置であって、ロッド15の周面を把持してロッド15を固定するロッドチャックブロック32を開閉可能に設けたロッド固定手段31をロッド振止手段21に隣接させてリーダ13の下部に配置する。
(もっと読む)
地盤の安定化用管体設置工法、トンネルの先受け工法及びそれに用いる掘削装置
【課題】削孔深度が深くなっても削孔速度が減速せず、削孔効率に優れた地盤の安定化用管体設置工法、トンネルの先受け工法及びそれに用いる掘削装置を提供する。
【解決手段】外管1と、内管2と、この内管1の先端側に取付けられたダウンザホールハンマー4と、このダウンザホールハンマー4の先端に取付けられ、このダウンザホールハンマー4による打撃力のみを与えて削孔を行うと、地盤が有する削孔反力との関係で削孔方向が偏心させる力を生じさせる形状の内管ビット20と、を備えた掘削装置を用いて地盤の安定化用の管体を地盤内に設置する工法であって、直線削孔の時には、前記内管ビット20に軸心回りの回転力、及び前記ダウンザホールハンマー4による打撃力を与えつつ削孔を行い、削孔に伴う孔曲りの修正時には、前記内管ビット20による打撃力のみで削孔を行い、上記の削孔を目標長まで削孔した後、前記外管1は地盤中に残置させて地盤の安定化用の管体とする。
(もっと読む)
削岩機の位置を測定する装置を備えた削岩装置及び削岩リグ
本発明は、掘削時にドリルポイントが突出するドリル端部(41)及び前記ドリル端部に対向する後端部(42)を有する送りビーム(4)を有する削岩装置に関する。削岩機(5)は、前記送りビーム(4)に沿って移動可能であり、かつ、圧力シリンダ(6)は、少なくとも部分的に送りビーム(4)の内部に配置され、一端(622)が送りビーム(4)に対して移動可能であり、かつ、他端(611)が送りビーム(4)に対して固定されている。送りライン(51)は、圧力シリンダ(6)によって駆動され、かつ、削岩機を送りビーム(4)に沿って前後に送るために削岩機(5)に連結されている。圧力シリンダ(6)の少なくとも一部は送りビーム(4)の内部に配置され、また、圧力シリンダ(6)の固定された端部(611)は送りビーム(4)の後端部(42)に配置されている。圧力シリンダ(6)は、前記送りライン(51)を介して、削岩機(5)を送りビーム(4)に沿って前後に移動するように構成されている。また、本発明は、前記削岩装置を備えた削岩リグにも関する。 (もっと読む)
削岩機の位置を測定する装置を備えた削岩装置及び削岩リグ
本発明は、掘削時にドリルポイントが突き出るドリル端部(41)と、前記ドリル端部(41)に対向する後端部(42)とを有する送りビーム(4)、送りビーム(4)に沿って移動可能な削岩機(5)、及び送りビーム(4)に配置され、一端(622)が送りビーム(4)に対して移動可能であり、他端(611)が送りビーム(4)に対して固定して設けられる圧力シリンダ(6)を有する削岩装置に関する。前記圧力シリンダ(6)は送りライン(51)を駆動し、削岩機(5)を送りビーム(4)に沿って往復移動させる。送りライン(51)は、送りビーム(4)の各端部(41,42)に設けられた二つの外側滑車(52,53)上を通る。送りビーム(4)に対する削岩機(5)の位置を測定するための測定装置(7)が、外側滑車(52,53)の一方の軸(9)に設けられ、測定装置(7)が設けられる滑車(52;53)及び軸(9)は一緒に回転するように構成されている。 (もっと読む)
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
61 - 73 / 73
[ Back to top ]