
Fターム[2F062GG75]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 光学的な検出器 (210) | 光波干渉測定 (40)
Fターム[2F062GG75]に分類される特許
1 - 20 / 40
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
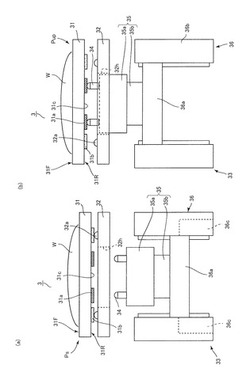
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
接触式プローブおよび形状測定装置

【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
形状測定装置及び形状測定方法
【課題】 接触式プローブによって、垂直に近いような急傾斜面であっても、安定して接触力を制御し、高精度な形状計測を行う。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面の傾斜を推定し、垂直に近い状態であると判断するとプローブ支持手段の移動方向に交差する方向にプローブ支持手段を移動させる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
形状測定方法
【課題】周期的な複数の設計段差を有する設計形状に基づいて形成された被測定面の測定データと設計形状とのフィッティングを高精度に行う。
【解決手段】被測定面の測定点列から段差領域と段差の高さとを特定する(S3)。そして、点列に対する段差高さの移動を行う(S4)。即ち、段差をなくすような処理を行い、段差のないフィッティング対象データを得る(S5)。一方、設計形状から複数の設計段差のない参照形状を取得する(S6、7)。そして、フィッティング対象データと参照形状とを、例えば最小二乗法などによりフィッティングする(S8)。フィッティング対象データと参照形状とから段差形状成分を除去しているため、フィッティングを高精度に行える。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
微小表面形状測定プローブ
【課題】プローブと被測定物との接触圧を従来よりもさらに微小に調整できる微小表面形状測定プローブを提供する。
【解決手段】微小表面形状測定プローブは、被測定物1と接触する接触子を2先端に有するプローブシャフトと、プローブシャフトに与える付勢力に対する反力が作用するようにプローブ本体に組み込まれた圧電センサと、圧電センサに作用する荷重を測定する荷重検出部と、荷重検出部により検出された荷重に基づいて、付勢装置による付勢力を調整する制御部と、接触子2を通して被測定物1との接触点へレーザ光を照射し、接触点で反射されたレーザ光を検出することで、接触子2と被測定物1との接触を感知する接触感知装置と、を備える。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
取り付け式スケールバー
スケールバー加工品は、ベースと、構造部材と、構造部材に配置されて、中心を持つ球形物体を収容するように構成される少なくとも2つのネストと、それぞれが第1部位及び第2部位を含む少なくとも3つの取り付けアセンブリとを含むことができる。各取り付けアセンブリの第2部位は、ベースに連結される。各取り付けアセンブリの第1部位は、構造部材に連結される。各取り付けアセンブリの第1部位と第2部位は、互いに接している。各取り付けアセンブリは、回転中心を有する。3つの取り付けアセンブリの回転中心は、球形物体の中心と共通の平面を共有する。 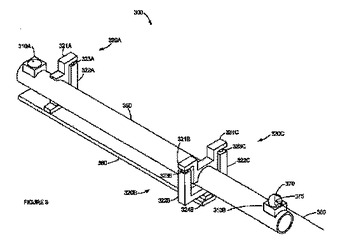 (もっと読む)
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
形状測定方法及び形状測定装置
【課題】段差が形成されている被測定面の面形状を安定して高精度に測定し、測定時間を短縮すること。
【解決手段】ステップS101では、被測定面に対して第1プローブを走査させ、第1プローブの3次元位置データを含む測定データを取得する。ステップS102では、ステップS101で得られた測定データに基づき、被測定面の段差位置を示す段差位置データを演算により求める。ステップS103では、第1プローブよりも高分解能で測定可能な第2プローブの走査条件を、ステップS102で得られた段差位置データに基づき、被測定面の位置に対応して決定する。ステップS104では、被測定面に対して第2プローブをステップS103で決定した走査条件で走査させ、第2プローブの3次元位置データを含む測定データを取得する。ステップS105では、ステップS104で得られた測定データに基づき、被測定面の面形状を示す面形状データを演算により求める。
(もっと読む)
内径測定装置及びその内径測定装置を用いた管路内径測定システム
【課題】管路内走行時に管の正確な内径を測定できる内径測定装置及びその内径測定装置を用いた管路内径測定システムを提供する。
【解決手段】本体部及び本体部を既設管路の内部で走行可能に支持する本体支持部、本体部に配設されて既設管路の内径を計測する内径測定部を備える内径測定装置において、内径測定装置の重心位置を、内径測定装置の既設管路への導入状態における中央位置に対して下方へ偏位させる。これにより、既設管路内を走行中の内径測定装置に振動等が付与されることに起因する内径測定装置の内壁に沿った旋回しながらの走行が抑制される。その結果、内径測定部による計測の軌跡が管路の軸線に平行するので、既設管路の正確かつ精密な内径測定が達成される。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
機上計測装置にて計測対象物の形状を計測する工作機械システム
【課題】機上計測を、直動軸と回転軸を含む同時多軸計測を行うようにし、機上計測装置の測定子の同一先端点で測定対象物の表面と接触して計測を行うことが可能な工作機械システムを提供すること。
【解決手段】一端に接触子を取り付けたプローブを有する機上計測装置1を用いて計測対象物の表面形状を計測する工作機械システムにおいて、前記計測対象物の表面に対して機上計測装置1のプローブ1bの中心軸が垂直になるようにプログラムされた計測プログラムに基づいて、球型接触子1fが前記計測対象物の表面に接触して倣うように前記各軸が数値制御装置により駆動制御されることを特徴とする機上計測装置にて計測対象物の形状を計測する工作機械システム。
(もっと読む)
形状測定装置
【課題】本発明の目的は、装置の測定精度とコストとの両立を図ることのできる形状測定装置を提供することにある。
【解決手段】被測定物30に対する相対的な位置及び姿勢が変化しない基準部材20と、走査軸方向の各位置xiごとに基準部材20と探針12との高さ方向距離データhiを検出する距離検出手段22と、該走査軸方向の各位置xiごとに距離検出手段22より送られてきた最新の高さ方向距離データhiの直前の高さ方向距離データhi−1に対する変化に追従して支持手段14の高さ方向位置が変化するように高さ方向駆動手段18による支持手段14の高さ方向駆動量を制御する測定力制御手段24と、走査軸方向の各位置xiごとに距離検出手段22で得られた高さ方向距離データhiに基づいて被測定物30の形状を算出する形状算出手段26と、を備えたことを特徴とする形状測定装置10。
(もっと読む)
微細形状測定装置
【課題】光学系を簡単にした上で、熱膨張、振動、機構の運動の変動等の外乱を除去し、信頼性の高い高精度な微細形状の測定を実現する。
【解決手段】単色光6を、測定面13方向に進行する測定光8と、該測定光に直交する方向に進行する参照光9とに分割する分割手段7と、該参照光を測定光と平行な方向に反射する反射手段17と、前記測定面に反射された後、前記分割手段7により前記参照光9とは反対の方向へ反射された測定光15と、前記測定面で反射された測定光14と平行な方向に戻ってきた前記参照光19とを合成する合成手段16とを備えたマイケルソン干渉計を基本とした微細形状測定装置であって、前記測定面13を直角三面鏡のコーナポイントOに対応させ、前記反射手段17により反射された参照光18の光路に、該直角三面鏡に対応する各鏡面部M1、M2、M3を配置した。
(もっと読む)
形状測定装置
【課題】本発明の目的は、構成の簡略化を図ることのできる形状測定装置を提供することにある。
【解決手段】上下方向に振動しながら被測定面24上を走査する探針12と、該探針12を上下方向に振動させる微小振動発生手段16と、該被測定面24と探針12間の距離ないし接触力が一定となるように該探針12を上下動する上下動制御手段17と、該探針12を該被測定面24上で走査する走査手段18と、該探針12の上下方向変位を測定し探針変位信号を出力する変位センサ20と、該信号26中の高周波成分より該被測定面24と探針12間の距離情報ないし接触力情報を取得し、該距離ないし接触力を一定に保つように該被測定面24を走査した際の該信号26中の低周波成分より該被測定面24の凹凸情報を取得する信号処理機構22と、を備えたことを特徴とする形状測定装置10。
(もっと読む)
形状測定装置および方法
【課題】 急傾斜面を接触式プローブにより測定すると、安定して接触力を制御することができず、高精度で高速な形状測定を行なう事ができなかった。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、接触式プローブの軸方向の変位と、接触式プローブの姿勢とを測定し、その測定結果から、接触式プローブが被測定物から受ける接触力ベクトルを計算し、接触力ベクトルの大きさが一定になるように、接触式プローブを前記接触力ベクトルと直交する方向に移動させる。
(もっと読む)
1 - 20 / 40
[ Back to top ]