
Fターム[2F063BD15]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の測定したい部分,その他の特徴 (463) | 対象物自身が移動しているもの (219)
Fターム[2F063BD15]の下位に属するFターム
対象物自身が回転しているもの (101)
移送体、移送されてくる対象物 (31)
Fターム[2F063BD15]に分類される特許
21 - 40 / 87
移動体システム
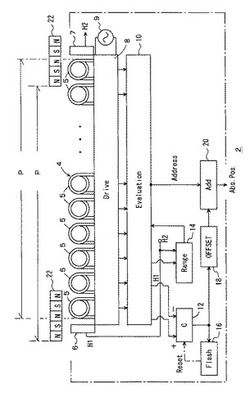
【構成】 複数のコイルからなるアレイを検出ヘッドに設け、アレイ長と等しいピッチで走行経路に磁気マークを設ける。磁気マークとコイルとの相互作用から、磁気マークを基準とする移動体の位置を求める。
【効果】 磁気マークを連続的に配置しなくても、移動体の位置を求めることができる。
(もっと読む)
慣性駆動アクチュエータ

【課題】移動体の全移動範囲に渡って、正確な位置検出を行うことのできる慣性駆動アクチュエータを提供する。
【解決手段】固定部材と、固定部材に接続され、第1及び第2の方向とに微小変位を発生する変位発生手段と、変位発生手段が発生した微小変位によって往復運動する振動基板と、振動基板上に配置され、慣性に基づく移動が可能な移動体と、移動体に接続され、電流印加によって、移動体に電磁気力を作用させることによって、移動体と振動基板との間の摩擦力を制御する駆動手段と、振動基板の平面上に、移動体と絶縁体層を介して対向配置され、かつ、移動体の移動に伴い移動体との対向面積が連続的に増加もしくは連続的に減少するように形成された、位置検出機能を備える検出電極と、移動体と検出電極との間の静電容量を検出することによって、移動体の位置を検出する位置検出手段と、を具備する。
(もっと読む)
電界測定システム
【課題】 3軸電界センサの計測データにより、電気モーメントとみなせる目標体の運動方向、向きが特定でき、運動パターンを区別し得る電界測定システムを提供する。
【解決手段】同一平面上に第1の電界センサSAと第2の電界センサSBとを配置しておき、配置領域内を運動目標体が通過すると、第1と第2の電界センサSA、SBで目標体によるXY軸の電界データをデータ処理装置に取り込み、X軸とY軸の電界から電界ベクトル回転角を求め、所定時間経過後のベクトル回転角の変化から電界ベクトル回転方向の正負の別を求め、求めた第1と第2の電界センサSA,SBに係る電界ベクトル回転方向の正負の別の組み合わせから目標体の運動コース1〜4を特定する。
(もっと読む)
長尺センサ及びその製造方法
【課題】近接・接触状態で異物を検知することができるとともに、センサの誤作動及び外観品質の低下を防止しつつ、ドアの端縁部の視認性を向上させる。
【解決手段】長尺センサ21は、取付基部22、表皮部23、及び、LED51を備える。表皮部23は、その内部に中空部26を備えており、LED51は、長尺センサ21の端部に設けられる。中空部26には、透明又は半透明であり、空気よりも誘電率の高い弾性変形可能な導光材料により形成されるとともに、LED51が発光する光を導光し、発光する弾性導光体29と、空気層30とが設けられる。また、中空部26には、第1の電極27と、第2の電極28とが設けられる。表皮部23は、自身の少なくとも一部に透明又は半透明の透明部52を有しており、弾性導光体29によって導光された光が透明部52を透過する。
(もっと読む)
ポジションセンサ
【課題】被検出部の設計の自由度を高めることのできるポジションセンサを提供する。
【解決手段】検出コイルを有する検出部2と、検出コイルに対して所定の方向に移動可能な被検出部3と、検出部2に対する被検出部3の変位を検出する処理を行う回路ブロック21と、検出部2及び被検出部3及び回路ブロック21を収納する筐体1とを備え、被検出部3は、前記移動方向における両端が開口した筒状に形成され、検出部2は、前記移動方向における一端から被検出部3の内側に入り込む形に配置され、被検出部3は、検出コイルを内側に納める第1の筒部32と、第1の筒部32に外挿される第2の筒部33とを接合して成る。
(もっと読む)
慣性駆動アクチュエータ
【課題】移動ストロークを最大限活用しながら、位置検出の精度の良い、小型の慣性駆動アクチュエータを提供する。
【解決手段】固定部材1と、振動基板3と、移動手段2と、導電体からなる移動体4と、移動体4と対向する振動基板3の面に設けられた電極31、32と、移動体4と電極との間に介在する絶縁膜310と、移動手段2を往復運動させるための電圧を印加するとともに、移動体4と電極との間に静電気力を作用させることにより振動基板3と移動体4との間に生じる摩擦力を制御するための電圧を印加する駆動手段と、移動体4と電極31、32の対向部分の静電容量に基づいて振動基板3に対する移動体4の位置を検出する位置検出手段7と、移動体4側面の移動方向に対して設置され、移動体4側面と電極31、32との静電容量の影響を遮断する静電遮断手段6とを備えていることを特徴とする。
(もっと読む)
小型スライド装置
【課題】 スライド装置を小型化することである。
【解決手段】 基台1と、この基台1の取り付け面1aに固定したレール2と、このレールに沿って移動するスライドテーブル3と、このスライドテーブル3の位置を検出する位置検出手段と、上記スライドテーブル3を移動させる駆動機構とを備え、基台1の取り付け面1aに形成した組み付け凹部14には、ホール素子16aを実装したセンサ基板16を組み込む一方、上記スライドテーブル3であって上記取り付け面1aと対向する面には永久磁石19を設けた。そして、永久磁石19と上記ホール素子16aとで位置検出手段を構成した。
(もっと読む)
無人飛行ビークルの飛行中燃料給油方法およびシステム
無人飛行ビークルに燃料給油するためのシステムおよび方法である。システムは第2の無人飛行ビークルから第1の無人飛行ビークルに燃料給油するように構成されており、予め定められた距離内で近接して第1および第2のビークルを飛行し、飛行中に第2のビークルから第1のビークルへ燃料供給ラインで接続するための構成を含んでいる。示されている実施形態では、接続のための構成は第1のビークル上の燃料給油レセプタクルを電磁的に検出する標的システムを含んでいる。追尾装置が第2のビークル上の前記燃料供給ラインの第1の端部に配置されている。追尾装置は第1のビークル上のレセプタクル周囲の第1のコイルからの磁気信号を検出するように適合された3つの検出器コイルを含んでいる。コイルが取付けられ、それによって検出器コイルは異なる方向で指向する。コイルの出力はタンカーのUAVからのUAVまでの方向と距離を決定するために処理される。 (もっと読む)
位置検出装置
【課題】広い範囲でさほど高くない位置検出精度でもよい場合に好適な位置検出装置を提供する。
【解決手段】磁石50が磁気センサ素子61,62に離間して配置され、磁気センサ素子61,62に対しN極とS極の界面を通る面F1に沿って相対移動可能である。磁気センサ素子61,62が、磁石50におけるN極とS極の界面を通る面F1上に磁気検出面が位置するように配置され、これにより磁気検出面において磁石50の着磁面に垂直なる成分以外の非垂直成分の磁界を検知するように磁気センサ素子61,62が配置されている。磁石50による磁界の強度を磁気センサ素子61,62において検知して磁気センサ素子61,62に対する磁石50の位置を検出する。
(もっと読む)
動き検出装置、動き検出方法及び電子機器
【課題】動作対象の動きを簡易に検出することができるようにする。
【解決手段】本発明は、動き検出システムにおいて、識別指標によって区別された複数周波数からなる準静電界を、少なくとも2以上の電界発生源から発生する準静電界発生装置と、動作対象に設けられ、準静電界の受信周波数に基づいて各電界発生源までの距離をそれぞれ判定し、当該判定した各距離を通知する距離判定装置と、距離判定装置により通知される各距離に基づいて距離判定装置の位置を算出し、当該算出した位置と予め保持された基準位置との変化量を動作対象の動き量として検出する動き検出装置とを設けるようにした。
(もっと読む)
軸受状態検査装置および軸受状態検査方法
【課題】 回転側輪や転動体に対して非接触の状態で、転がり軸受における潤滑膜の状態を、軸受温度、回転速度によって潤滑膜厚さが変化する場合に正確にかつ簡単に判定することができる軸受状態検査装置および軸受状態検査方法を提供する。
【解決手段】 温度、回転速度をパラメータとして、演算により求めた潤滑膜厚さから計算上の静電容量を求めておき、この計算上の静電容量と実際に測定した静電容量との比較結果から軸受の潤滑状態を判定する。
(もっと読む)
着磁ヨーク、磁石着磁方法、磁石、位置検出装置、及び、振れ補正装置
【課題】NS境界部位の両側に磁束密度が直線的に増加する位置検出用の磁石を着磁するための着磁ヨークを提供する。
【解決手段】磁性体に対して一対のN極とS極とを着磁して位置検出用磁極45aを得るために、所定幅W0の磁気ギャップ部1cを挟んだ両側に磁性体に当接させる当接面1a2,1b2を有する一対の着磁片1a,1bを備えた着磁ヨーク1Aにおいて、一対の着磁片1a,1bは、それぞれの当接面1a2,1b2が磁気ギャップ部1cの一端よりも突出しており、磁気ギャップ部1cの一端と、それぞれの当接面1a2,1b2との間を接続するテーパ面1a1,1b1を有することを特徴とする着磁ヨーク1Aを提供する。
(もっと読む)
位置決め制御システム
【課題】高精度かつ高速な位置決め制御を可能にする。
【解決手段】位置決め制御システム1において、変位センサ4は、共振回路6に対して所定数の駆動信号を出力すると共に、駆動信号出力停止後に共振回路6から減衰状に出力される自由振動波の数をカウントし、該カウント数が所定数Nに達したか否かを判断する自由振動波カウント処理を行い、該自由振動波カウント処理に要した時間測定にもとづいて自由振動波の位相ズレ成分を検出するにあたり、一回の自由振動波カウント処理における自由振動波のカウント数Nを変更可能であり、置決め制御装置5は、可動体2の目標位置Tに対する検出位置Kの偏差Hに応じて、変位センサ4にカウント数Nの変更指令を出力する手段を備え、該手段が偏差Hの減少に応じてカウント数Nを増加させる。
(もっと読む)
位置検出装置
【課題】1つの磁気センサが故障しても、故障する以前と同じ数の位置検出が可能な位置検出装置を提供する。
【解決手段】第1〜4のMRセンサ131A〜131Dは、バイアスマグネット132Bによるバイアス磁界が付加されている。第1〜4のMRセンサ131A〜131Dは、カウンターマグネット132Aの位置に基づいて出力された出力電圧をしきい値141に基づいて「H」と「L」の出力信号に分け、ECU14は、その「H」と「L」の組合せによって、カウンターマグネット132Aの位置を判断する。
(もっと読む)
位置検出装置
【課題】誤作動を防止した位置検出装置を提供する。
【解決手段】第1及び第2のMRセンサ131A、131Bは、第1及び第2の方向2,3からカウンターマグネット132の磁力線が横切るとき、磁気抵抗が最大になるように構成されている。ECU14は、第1及び第2のMRセンサ131A、131Bから出力された出力電圧が、しきい値140より大きいときを「H」、小さいときを「L」とする2値とし、この2値の組合せとシフトマップ141に基づいてカウンターマグネット132の位置を判断する。
(もっと読む)
位置調整要素
【課題】省スペースかつ低コストである手段により、シリンダに対するピストンの位置、ひいてはピストン棒の位置を検出できる位置調整要素を提供する。
【解決手段】本発明は、一端を閉止され加圧状態にある流体で充填されているシリンダと、シリンダ内を軸線方向に変位可能でありシリンダを第1の作業室と第2の作業室とに分割させているピストンと、ピストンの片側に配置され第1の作業室を貫通して密封案内装置を介して密封状態でシリンダの他端から突出するピストン棒とを備えた位置調整要素に関し、位置調整要素(1)はピストン棒の位置および該位置調整要素の突き出し長さを検出するための測定装置を有する。
(もっと読む)
変速機用操作レバーのレバー操作位置判定装置
【課題】レバー長さ方向のサイズをできるだけ低く抑えつつ、しかもレバー操作位置検出系の検出素子の移動量も確保することができる変速機用操作レバーのレバー操作位置検出装置を提供する。
【解決手段】マグネット19,20及び磁気検出素子21〜25でセレクトレバーのレンジ位置を検出するレバー位置検出装置18に、マグネット19,20の移動量を増幅するリンク機構31を設ける。このリンク機構31は、セレクト方向及びシフト方向に対応した一対のリンク34,35を持ち、これらリンク34,35の先端にマグネット19,20が取着される。リンク機構31は、垂直平面回動操作されたセレクトレバーの動きを、マグネット19,20の水平平面回動運動に変換し、このリンク作用を以てマグネット移動量をセレクト方向及びシフト方向の各々で増幅する。
(もっと読む)
カテーテル追跡システム
【課題】較正を簡略化し、かつ測定精度の向上を可能とするカテーテル追跡システムを提供する。
【解決手段】人または動物の身体1の部分内でカテーテル頭部16の位置を位置決めおよび追跡するための、図1、図2および図3に示したようなカテーテル追跡システム。このカテーテル追跡システムは、人または動物の身体を介して所望の位置に導かれるように構成された頭部16を有するカテーテル10と、複数の磁界変換器であって、そのうちの少なくとも1つがカテーテル18上に配置され、他のものが身体内部および/または周囲に配置されると共に基準変換器19として機能する複数の変換器と、複数の磁界変換器を付勢する制御ユニットとを備える。磁界信号を処理する際、基準変換器19に対してカテーテル頭部16の位置を決定する。
(もっと読む)
絶対変位・速度計測用センサ
【課題】 建物の振動制御に適用できるような低振動数から測定でき、小型でも大地震の変位測定にも適用でき、しかもセンサの設置状況によって測定信号に直流分が生じない絶対変位・速度計測用センサを提供すること。
【解決手段】 本発明の絶対変位・速度計測用センサ10は、筐体1に内蔵され、ばね3及びダンパ4によって支えられた重り2と、それを計測範囲内で不動にするように作動するアクチュエータ6と、重り2と筐体1との間の速度を検出する相対速度センサ5と、重りの動きを制御するコントローラとからなる。
(もっと読む)
地中位置検出装置
【課題】ボーリング等による地中掘削時にリアルタイムで精度よく地中の掘削先端位置を把握できる地中位置検出装置を提供する。
【解決手段】掘削機の掘削先端部に設置される発信器1の1次励磁コイル2から発信された磁気信号によって、受信器11の3台の3軸検出コイル12、13、14のそれぞれのX軸コイル、Y軸コイル、Z軸コイルに誘起電圧が誘起され、この誘起電圧に基づいて制御装置18が発信器1(掘削先端位置)を示す位置データを算出して表示装置17に表示するとともに、発信器1の温度センサ3、ピッチ角度センサ4、ロール角度センサ5のセンサ信号をセンサ用アンテナ15が受信し、制御装置18が検知温度、検知ピッチ角度、検知ロール角度を算出して表示装置17に表示する。
(もっと読む)
21 - 40 / 87
[ Back to top ]