
Fターム[2F063BD15]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の測定したい部分,その他の特徴 (463) | 対象物自身が移動しているもの (219)
Fターム[2F063BD15]の下位に属するFターム
対象物自身が回転しているもの (101)
移送体、移送されてくる対象物 (31)
Fターム[2F063BD15]に分類される特許
61 - 80 / 87
位置計測装置
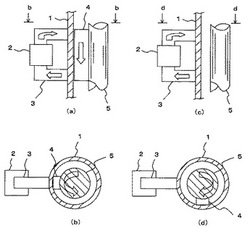
【課題】高温・高圧・放射線被爆環境下でメンテナンスフリー且つ長寿命な位置計測装置を提供する。
【解決手段】回転することによって位置計測対象物を移動させる回転軸5に取り付けられた回転磁心4と、隔壁1を介して回転軸5の近傍の固定部に設けられ回転軸5の所定の回転位置において回転磁心4とともに磁気回路を形成する固定側磁心3と、固定側磁心3に巻装された検出コイル2と、検出コイル2に誘起される電圧の変化する回数を計数する信号処理部6とを備えている構成とする。
(もっと読む)
位置検出装置およびカメラ

【課題】 1つの検出軸のみだけで独立して精度の良い位置検出を可能とする位置検出装置を提供すること。また、このような位置検出装置をカメラ振れによる像振れの補正に利用したカメラを提供すること。
【解決手段】 位置検出装置は、互いに垂直なx方向、y方向、z方向の座標軸を定義した場合に、x方向の位置を検出する。この位置検出装置は、x方向の同一平面内にN極11とS極12が配置され、x方向の位置によってx方向に垂直なz方向の磁場の強度が異なるように構成された磁石11、12と、この磁石の磁場の中に配置され、x方向に移動可能に構成され、x方向の位置によりz方向の磁場の影響を受けて出力が異なるホール素子3と、ホール素子3の出力に基づきホール素子3のx方向の位置を演算する位置演算部32とを備える。この磁石11、12は、磁石のy方向中央からy方向に位置がずれるにつれて、x方向のN極11とS極12の間の距離を短くするように構成されている。
(もっと読む)
磁気スケール
【課題】磁性部材を確実に保護し耐久性を向上する上で有利な磁気スケールを提供する。
【解決手段】磁気スケール10は、パイプ材20と、磁性部材30とを備えている。パイプ材20は、断面が円筒状を呈するパイプ材20で形成され、磁性部材30の磁力に磁性的に影響を与えない材料で形成されている。磁性部材30は、パイプ材20の内面22にパイプ材20の長手方向に沿って延在させて設けられている。磁性部材30は、着磁可能であり、その延在方向に沿ってN極とS極とが交互に一定のピッチで着磁されることによって磁気目盛りが形成されている。パイプ材20の内面22に対する磁性部材30の取着は、パイプ材20の内面22と磁性部材30の磁性部材30の外面32とが両面粘着テープで接着されることでなされ、磁性部材30の外面32がパイプ材20の内面34に密着している。
(もっと読む)
静電容量センサ及び静電容量センサ付きフラップ型ハンドル
【課題】 センサ本体3の仕様を変えないで感度調整が容易に可能となり、しかも、検出感度の位置による違いを低減し、所要のバランスに調整することが可能な静電容量センサを備えたフラップ型ハンドルを提供する。
【解決手段】 センサ本体3をハンドル基部11に取付け、センサ本体3の検出面をハンドルフラップ12内面側の所定の検出範囲に向けるとともに、前記検出範囲を覆うようにハンドルフラップ12の内面に導電面14を設け、さらにこの導電面14と前記検出電極を少なくともハンドルフラップ非動作時に電磁的に結合させる接続用導電体13を設け、この接続用導電体13又は/及び前記導電面14に、検出感度調整用のトリミングを施した(切欠き等を設けた)構成とする。
(もっと読む)
シリンダの位置計測装置
【課題】
リセットセンサで検出される信号のピークを正確に求めるようにして、ストローク位置センサの原点位置へのリセットを高精度に行えるようにする。また、シリンダチューブ内部のピストン等の直動部材の移動速度如何にかかわらず、正確に原点位置(特定位置)を計測できるようにする。
【解決手段】
回転センサ100の検出回転量から得られるピストン201の計測ストローク位置Inと、磁力センサ301の検出信号(磁力;電圧値)Vnとの対応関係500を求め、この対応関係500に基づいて、ピストン201が原点位置I0に達したときの計測ストローク位置Ip(ピーク位置)を求め、この計測ストローク位置(ピーク位置)Ipを、原点位置I0にリセットする。
(もっと読む)
電子内視鏡システム
【課題】少なくとも体腔内に挿入された内視鏡先端部から突出自在な処置具の先端部と該内視鏡先端部との相対位置を検出することができる電子内視鏡システムを提供することを目的とする。
【解決手段】電子内視鏡システムは、先端部に撮像素子および第一の磁場発生器を有し、前記撮像素子により被検者の体腔内の画像を撮像する内視鏡と、先端部に磁場検出センサを有し、内視鏡の鉗子管路を介して内視鏡先端部から突出するように構成される処置具と、第一の磁場発生器から発生した磁場に基づき磁場検出センサで発生する誘導電流に基づいて、該第一の磁場発生器に対する処置具先端部の位置を検出する位置検出手段と、を有する構成にした。
(もっと読む)
車両用窓センサ
【課題】車両窓への人の接近を確実に検出する車両用窓センサを提供する。
【解決手段】車両窓ガラスに設置した透明あるいは線状のセンサ電極と車体との間の静電容量の変化を検出する静電容量検出回路を備えた車両用窓センサ。センサ電極は、ガラス表面あるいは合わせガラスの内層に設置され、格子状または縞状にできる、また窓下部のウエザストリップで隠して設けることができ、窓ガラスに設けた電熱線あるいはTVアンテナを共用することもできる。
【発明の効果】車両窓に接近した人を確実に検出できるセンサとして使用できる。
(もっと読む)
路面切削装置及び路面凹凸検出装置
【課題】 人手により溝の深さを一々計測したり調整用ハンドルを操作する必要なく、路面に凹凸があっても簡単に所定深さの溝を形成できる極めて実用性に秀れた画期的な路面切削装置及び路面凹凸検出装置を提供することである。
【解決手段】 移動体1に路面に溝2を形成するための切削部3が設けられ、該移動体1を移動せしめながら前記切削部3により路面に溝2を切削形成する路面切削装置であって、前記切削部3の前方位置には、該切削部3により切削される路面の凹凸を自動的に検出する路面凹凸検出機構4が設けられ、該路面凹凸検出機構4により検出された路面の凹凸に応じて前記切削部3を制御し、該切削部3により形成される溝2の深さを自動的に調整する切削部制御機構5が設けられているものである。
(もっと読む)
位置検出装置、レンズ装置および撮像装置
【課題】 カメラ用ズームレンズ等の位置検出に使われるエンコーダー出力の相の間での出力差、位置による出力差、温度などの環境変化による出力変動を補正し、高精度に位置検出を行う位置検出装置を得る。
【解決手段】 電源投入時等に行われるプリスキャンにより得られる移動体の可動範囲全域の記憶した第1の正弦波出力情報と、実動作中に得られる第2の正弦波出力情報と該第1と第2の情報を用いて出力を補正することを特徴とする。
(もっと読む)
静電容量式物体検知センサ及び物体検知方法
【課題】少なくとも一方が移動し、接近及び離間する2つの物体間の静電容量を検出して、変化する前記静電容量に基づいて、少なくとも前記物体間の距離、又は前記物体間に存在する別の物体の有無を検出する静電容量式物体検知センサ、及び静電容量式物体検知方法を提供する。
【解決手段】接近及び離間する2つの物体の一方である第一物体1と、少なくとも2つの物体の他方である第二物体X又は前記2つの物体の間における第三物体Xとの間の静電容量に応じて定まる発振周波数で発振する発振器2と、静電容量の変化に伴って変化する発振周波数の変化を検出する検出部3と、この検出結果に基づいて少なくとも2つの物体の距離、又は第三物体の有無を判定する判定部4とを備える。
(もっと読む)
地中位置計測方法及びシステム
【課題】複数の地中位置において同時に対地三次元座標を計測できる地中位置計測方法及びシステムを提供する。
【解決手段】地上又は地中の既知三次元座標の複数の基準位置Rから、自己相関が強く相互相関が弱い識別符号列Pで変調された周期性基準信号frを、所定搬送周波数fcの回転磁界3に乗せて地中2へ発信する。地中2の計測位置Qに三以上の受信コイル素子群21が所定相互関係で取り付けられた磁界計測装置20を所定姿勢Sで配置し、回転磁界3により各コイル素子21に誘起される信号fqを計測する。各コイル素子21の計測信号fqと各識別符号列Pとの相関に基づき計測位置Qにおける各基準信号frの位相τを検知し、各基準信号frの位相τのコイル素子相互間位相差Δτとコイル素子群21の所定相互関係及び姿勢Sとから、各基準位置Rの向きθRを検出する。各基準位置Rの既知三次元座標と向きθRとから、計測位置Qの対地三次元座標を算出する。
(もっと読む)
非接触式位置検出センサ
【課題】 精度の高い非接触式位置検出センサを安価に製作することを目的とする。
【解決手段】 本発明に係る非接触式位置検出センサは、可動部23が固定部21に対して一定方向に移動すると、磁束検出素子30が検出する磁束密度が変化することで、固定部21に対する可動部23の相対位置が求められる構成の非接触式位置検出センサ20であって、磁石43には、磁束を誘導するためのヨーク41,42が接続されており、ヨーク41,42には磁束を誘導する部分の途中に隙間Gが設けられており、磁束検出素子30は、固定部21に対して可動部23が移動することにより、ヨーク41,42の隙間G内を一定方向に相対移動する構成であり、ヨーク41,42の隙間Gを構成する部分は、磁束検出素子30が検出する磁束密度を予め決められたパターンに基づいて変化させることが可能な形状に加工されている。
(もっと読む)
位置決め装置
【課題】簡便かつ安価な構成で、可動部材の傾きを抑えながら位置決め制御できる位置決め装置を提供する。
【解決手段】位置決め装置10は、圧電素子14、圧電素子14の一端に固定された駆動部材16、および、駆動部材16上に移動可能に摩擦保持された可動部材18からなる圧電アクチュエータ20と、圧電素子14を駆動する駆動回路21と、可動部材18の位置を検出する位置センサ25と、位置センサ25からの信号を処理する検出回路26と、検出回路26による位置検出値に基づいて駆動回路21に駆動指令信号を与えることで可動部材18の位置フィードバック制御を行う制御回路28とを備え、可動部材18の位置決め動作の際、制御回路28は、可動部材18が目標停止位置に一旦到達した後に、オーバーシュートを伴う位置決め制御を所定時間以上さらに継続する。
(もっと読む)
回転飛翔体の回転角計測制御方法及び回転飛翔体
【課題】本発明は、回転飛翔する飛翔体内のコイルから地磁気を界磁として発生する電圧波形を用いて基準方位信号を得ることを目的とする。
【解決手段】本発明による回転飛翔体の回転角計測制御方法は、コイル(c)を設けた飛翔体(1)を発射し、中心軸を回転中心として回転する飛翔体(1)内のコイル(c)から地磁気(B)を界磁として発生する電圧波形(V)から飛翔体(1)の空間における回転角度である基準方位信号を得る方法である。
(もっと読む)
位置検出装置およびカメラ
【課題】 位置検出を精度良く行うことができる位置検出装置の提供。
【解決手段】 磁気抵抗素子が2対設けられた検出ヘッド2に対して、磁気スケール1が接触しながらは図示左右方向に移動すると、一方の磁気抵抗素子対からはA相出力が、他方の磁気抵抗素子対からはB相出力が出力される。各比較器5a,5bは、A相およびB相出力と基準電圧発生器7からの基準電圧値Vrとに基づいて矩形波Y1,Y2を出力する。矩形波処理回路8は各矩形波Y1,Y2に応じたパルス信号をマイクロコンピュータ9に出力し、マイクロコンピュータ9はそれらのパルス信号をカウントすることにより磁気シート1の移動距離を検出する。基準電圧発生器7は位相検出器6から出力される移動方向情報に基づいて、右方向移動時の基準電圧値または左方向移動時の基準電圧値を各比較器5a,5bに出力する。
(もっと読む)
XYステージ
【課題】 スライダ部のピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 X軸モータ及びY軸モータによりスライダ部を2次元方向に位置制御するXYステージにおいて、
前記スライダ部のX方向ピッチング角を検出する第1のZ軸センサと、
前記スライダ部のY方向ローリング角を検出する第2のZ軸センサと、
前記第1及び第2のZ軸センサの測定値に基づき、前記X軸モータ又はY軸モータの少なくともいずれかの励磁電流にこれと位相が直交する電流を重畳させる直交電流生成手段と、
を備える。
(もっと読む)
ドラム式洗濯機
【課題】 回転ドラムを収容した水槽が洗濯物の偏り等により振動して異常振動や異常騒音の発生にならないように水槽の変位を精度よく検知する変位検知手段を設けたドラム式洗濯機を提供する。
【解決手段】 水槽と洗濯機筐体の基底部との間に変位センサ36を配設し、水槽の変位によって変位ロッド部41が検知コイル部40内で進退移動させる。変位ロッド部41にはフェライト42が設けられ、それが検知コイル部40に設けられた3つの巻線61,62,63内で移動すると、1つの一次巻線61に印加された励磁信号が2つの二次巻線62,63から励起される信号出力が変化するので、信号出力を処理した電圧変化から水槽の変位情報を得ることができる。2つの二次巻線62,63の巻回位置が異なるので、得られる変位情報は異なる電圧変化勾配を示し、それぞれを異なる検知目的に使用することができる。
(もっと読む)
近接センサ及びそれを用いた挟み込み検出装置
【課題】静電容量型の近接センサを用いて人体とそれ以外の水滴などを判別して人体の接近を確実に検出する。
【解決手段】ドア1の閉側に外側電極2aを、開側に内側電極2bを配置し、外側電極を波形成形回路5を介して差分回路6に接続しかつ内側電極も差分回路に接続し、両電極の電位Va・Vbの差に対応する出力電圧Vcを判定回路7に入力する。判定回路では、電圧Vcが閾値電圧Vd以上になったら人体接近であると判定する。一対の電極をそれぞれ非接地状態にし、その一方を振回路からの振幅信号の入力により帯電させた帯電極とし、他方を帯電極との間に生じるコンデンサ作用により帯電極から電荷を受け取って帯電する検出極として、大地に対して直接経路が無い物体(水滴など)と経路が生じる物体(人体)とを区別することができ、人体の接近検出で水滴を誤検出することを防止し得る。
(もっと読む)
電縫鋼管中継ぎ溶接部の検出方法
【課題】本発明は、造管後であっても、オンラインで電縫鋼管の中継ぎ溶接部を従来より精度良く検出可能な電縫鋼管中継ぎ溶接部の検出方法を提供することを目的としている。
【解決手段】製造ライン上を走行する先行鋼帯の後端部に後行鋼帯の先端部を溶接して、鋼帯に中継ぎ溶接部を形成させた後、該鋼帯を円筒状に成形し、突き合わせた幅方向両端部を溶接して電縫鋼管に造管してから、該電縫鋼管に存在する前記中継ぎ溶接部を検出する技術である。具体的には、前記電縫鋼管に近接して高周波電圧を印加するコイルを配置し、該コイルが発する高周波磁束により該電縫鋼管内に生じる渦電流を常時測定し、その測定値を一定の閾値と比較して、その大小で中継ぎ溶接部の位置を判定する。
(もっと読む)
エンコーダ用磁気センサ、センサアセンブリ及びレンズ鏡筒
【課題】 取り付け精度及びロール方向の傾きに基づくギャップ変動を低減することができるエンコーダ用磁気センサ、センサアセンブリ及びレンズ鏡筒を提供する。
【解決手段】 エンコーダ用磁気センサは、回転筒にその円周方向に沿って取り付けられておりかつ所定の着磁ピッチで着磁されている磁気媒体の表面に摺動面が接触することによって磁界検出を行う。摺動面の着磁ピッチ方向の幅は回転筒の直径の3/500以下である。
(もっと読む)
61 - 80 / 87
[ Back to top ]