
Fターム[2F063BD16]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の測定したい部分,その他の特徴 (463) | 対象物自身が移動しているもの (219) | 対象物自身が回転しているもの (101)
Fターム[2F063BD16]に分類される特許
41 - 60 / 101
スクリューフィーダーの異常検出方法。
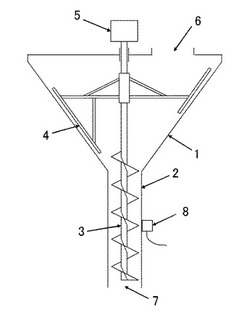
【課題】スクリューフィーダーのスクリュー翼とスクリューケースとの間隔を正確に把握し、スクリューフィーダーの異常を確実に検出する方法を提供することにある。
【解決手段】スクリューフィーダーの内部にスクリュー翼を有する部位のスクリューケースの外周部に渦電流センサを設け、スクリュー翼とスクリューケース内面との間隔を測定し、異常を検出することを特徴とする、すなわちスクリュー翼とスクリューケースとの間隔を直接、非接触で測定することによって、スクリュー翼等の異常によるスクリュー翼とスクリューケースの異常接近を確実に検出することができる。
(もっと読む)
電動パワーステアリング装置用アングルセンサ

【課題】ステアリングシャフトの絶対回転角度を検出することができる電動パワーステアリング装置用アングルセンサを提供する。
【解決手段】ステアリングシャフトと同期回転する装置側歯車に噛み合う接続用歯車41と、接続用歯車41と同期回転する中間歯車48と、中間歯車48に噛み合うセンサ歯車49と、センサ歯車49の相対回転角度を検出するセンサ本体56と、センサ歯車49の中間歯車48と噛み合わない位置に配置された歯部60と、歯部60に噛み合って駆動されることによりセンサ歯車49の回転方向に対応した方向に移動するスライドギヤ61と、スライドギヤ61に設けられた被検出部Zを検出する検出部A,Bと、センサ本体56で検出したセンサ歯車49の相対回転角度と検出部A,Bでの検出結果とに基づいて絶対回転角度を算出する演算部と、を備えるアングルセンサ40である。
(もっと読む)
センサ付き転がり軸受装置の製造方法
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
センサ付き転がり軸受装置
【課題】車輪のモーメント荷重や軸方向の並進荷重を求めることが可能なセンサ装置を備え、上記センサ装置と独立のABSセンサを設置しなくても、回転軌道部材の回転速度を検出することができるセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材73の外周面で構成される被変位検出部の一部に、軸方向に延在する溝155を有する環状部150を形成する。
(もっと読む)
圧延機ワークロールのロールギャップ測定装置
【課題】ロールギャップを高精度に測定でき、且つクロスロール圧延機などのクラウン制御ミルにも適用可能なロールギャップ測定装置を提供する。
【解決手段】上下ワークロール1a,1bのうちの少なくとも一方のワークロールの外周部に、バックアップロール及び被圧延材と干渉しないように設けられる渦流式距離センサ5と、この渦流式距離センサ5への電力供給及び渦流式距離センサ5の測定信号の取り出しを行うためのスリップリング機構6を備える。一方のワークロールの外周部に設けられた渦流式距離センサ5は、他方のワークロールとの最短距離を磁気的に高精度に測定できるので、外乱の影響を受けることなくロールギャップを高精度に測定することができ、しかも、クロスロール圧延機などのクラウン制御ミルにも適用可能である。
(もっと読む)
スロットル開度検出装置の製造方法
【課題】より少ない作業工数で、永久磁石を高精度に樹脂歯車内に固定して、スロットル開度を高精度に検出することができるスロットル開度検出装置を提供する。
【解決手段】スロットル弁3のスロットル軸4に樹脂歯車9が結合され、樹脂歯車9の一部に永久磁石が取り付けられ、永久磁石と非接触で対向して固定側に配設した磁気センサ22からの出力信号に基づき、樹脂歯車9の回転角度を検出してスロットル弁3の開度を検出するスロットル開度検出装置である。樹脂歯車9の軸心位置に凹状のボス部9bが形成され、ヨーク20と永久磁石21がボス部9bの内周面に沿って取着され、樹脂歯車9は、ヨーク20と永久磁石21をインサートとして合成樹脂によりインサート成形されている。
(もっと読む)
間隔測定についてのシステムおよびそのシステムの操作方法
【課題】間隔検出システム(110)を提供する。
【解決手段】システム(110)は可変距離d(116)によって検査対象(114)から離間されたプローブ(112)を含む。システム(110)はまたプローブ(112)を介して電流を供給するための交流(AC)電源(118)も含み、AC電源(118)およびプローブ(112)はプローブ(112)の先端と検査対象(114)の間に制御されたプラズマチャネル(120)を生成するように構成される。システム(110)はさらに、プローブ(112)の先端と検査対象(114)の間の電圧差に基づき可変距離d(116)を決定するように構成された処理ユニット(124)を含む。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
磁気式エンコーダー
【課題】 磁気センサー素子の摺動方向位置ずれが小さく中点電圧の変動が少なく、磁気
センサー素子と加圧ばねの組立が容易で、耐摺動性が高く、衝撃等の外力に対しても安定
した磁気エンコーダーを得る。また、磁気センサー素子はウェファーから砥石で切断した
状態で使用できる、安価な磁気エンコーダーを提供することである。
【解決手段】 磁気センサー素子の幅wを1.1mm以上4.0mm以下、センサー素子
の媒体摺動面と荷重点との距離hを0.2mm以上1.0mm以下とし、w/hが3以上
20以下の平べったい形状とする。
(もっと読む)
回転角検出装置
【課題】回転軸方向の長さの増大を抑制することができる回転角検出装置を提供すること。
【解決手段】本発明による回転角検出装置1は、空洞部2を有する回転軸3と、回転軸3を回転自在に片持ち支持する軸受4と、空洞部2に磁界を形成する磁界形成手段5と、回転軸3の回転に伴う磁界の回転に基づいて回転軸3の回転角を検出する回転角検出センサ6とを備える回転角検出装置であって、空洞部2を、軸受4の内周側に位置させて、回転角検出センサ6を空洞部2内に位置させて、空洞部2と軸受4と回転角検出センサ6を回転軸3の径方向視において重複させて位置させることを特徴とする。
(もっと読む)
位相角検出装置及び該位相角検出装置を用いた内燃機関のバルブタイミング制御装置
【課題】位相変更機構によって制御された中間回転位相を検出して制御精度の向上を図り得る位相角検出装置を提供する。
【解決手段】スプロケット2とカムシャフトとの間に設けられ、ヒステリシスリングに電磁コイルからの電磁力よってブレーキ力を作用させて、前記両者の相対回動位相を変更する。前記スプロケットの外周面の等間隔位置に4つのターゲット突起25を設けると共に、渦ディスク13の外周面の等間隔位置に、第1ターゲット突起に対して20°の遅れた位相に設定された4つの狭幅の第2ターゲット突起26を設けた。また、前記第1、第2ターゲット突起からそれぞれのパルス信号を生成する角度検出センサ27を設け、この両パルス信号の離間長さに応じて少なくとも中間位相角をコントローラ24によって検出するようにした。
(もっと読む)
回転角度検出用センサシステムおよび可動部の位置検出方法
【課題】干渉磁界および干渉電界に対して低感度とすることが可能であり、ロータのような回転体の位置を検出するための回転角度検出用センサシステムを提供する。
【解決手段】機械の回転体2の位置を検出するために、回転体2に取り付けられかつこの回転体2と共に移動可能であるエンコーダ構造3と、このエンコーダ構造3の対向側に配置され、かつ位置を決定し得る少なくとも1つのセンサ信号9を供給する固定センサアセンブリ4とを備え、センサアセンブリ4が第1のインダクタンス素子を備え、またインダクタンス素子が、前記エンコーダ構造3の動作に依存してインダクタンスの変化を生じさせるように、回転角度検出用センサシステムを構成する。
(もっと読む)
車両データを、とりわけホイールで走行する車両の速度を測定する装置
第1のセンサ(10)と第2のセンサ(20)を有するホイールで走行する車両の速度を測定するための測定装置。これら2つのセンサは同一のホイール(5)に取り付けられている。前記両センサとも、前記ホイール(5)の軸に対してそれぞれ垂直に作用し、互いに対してある角度をなす力を測定するように配置されている。さらに前記2つのセンサ(10,20)の測定値を受け取る評価装置(30)が設けられており、前記評価装置は前記両センサ(10,20)の測定値から前記ホイール(5)の車両走行方向における加速度を求める。  (もっと読む)
(もっと読む)
複数先端クリアランス測定システムおよび操作方法
【課題】一つ先端エラーおよび変動を検出して、修正することによって、2つの部品の間のクリアランスの正確な測定を提供する複数先端クリアランス測定システムを提供することにある。
【解決手段】複数先端クリアランス測定システム(12)が開示されている。本複数先端クリアランス測定システム(12)は、第1の対象物(24)に配置され、該センサが第2の対象物(26)に対応する検出されたパラメータを表示する信号を生成するように構成される複数のプローブ先端部(62、64、66、68)を含むセンサ(28)と、異常値プローブ先端部を検出して、それぞれの異常値プローブ先端部のゲインまたはオフセットを調整するためにプローブ先端部(62、64、66、68)から検出されたパラメータのサブセットから信号を評価し、該信号に基づき第1の対象物(24)と第2の対象物(26)との間のクリアランスを測定するように構成される処理装置(34)とを含む。
(もっと読む)
角度位置を検出する検出装置、電動機、ステアリングコラムおよび減速装置
角度位置を検出するための装置、電動機、ステアリングコラムおよび減速装置
である。非回転要素に対する電動機の軸2の角度位置を検出するための検出装置1において、軸2に接続されて回転する入力側、そして出力側を有する減速装置5を備え、減速装置5の出力側には、2πより小さい角度に亘って移動し、減速装置5の出力側の角度を測定するため一回転角度位置センサー26が配設されており、かつ、減速装置5の入力側に角度位置センサー27が配設されている検出装置1。  (もっと読む)
(もっと読む)
渦電流式導電体検出装置
【課題】ターボチャージャなどの回転数や導電体との位置関係を検出する渦電流式導電体検出装置において、温度変化による出力変動を低減し高精度に導電体を検出すること。
【解決手段】渦電流式導電体検出装置のLC並列接続回路から出力される信号電圧に基づいてコイルに対する導電体の位置情報を検出する信号処理回路を備える渦電流式導電体検出装置において、出力の高温時と低温時の出力差が周波数軸上にて2つの一致点をもち、かつ、これら2つの一致点の周波数において低温時にも高温時にも相当に大きな出力差を確保できることを見出した。これら2つの一致点のどちらかの周波数をもつ交流電流をこのLC並列接続回路に与えれば、少なくとも上記所定の低温時の上記所定の高温時とでの出力変動をキャンセルすることができ、温度変動による出力誤差を解消でき、温度変化にもかかわらず回転数を高精度に検出できる。
(もっと読む)
タイヤ内部故障検知装置およびタイヤ内部故障検知方法
【課題】タイヤが装着された車輪を備える車両が走行している状態で、このタイヤの内部に発生している内部故障を、高い精度で検出することができる、タイヤ内部故障検知方法およびタイヤ内部故障検知装置を提供する。
【解決手段】転動中の前記タイヤに関するタイヤ情報を取得し、前記タイヤ情報に基づき、車両が走行している最中の前記タイヤの接地部分の変形量を導出し、導出された前記変形量に基いて、前記内部故障の発生の有無を判定するための評価値を算出し、算出された前記評価値と予め定められた基準値とを比較することで、前記タイヤ内部に内部故障が発生しているか否かを判定する。
(もっと読む)
磁気マッピング装置
【課題】 磁気方式のHMTの使用する上で必要な磁気データの取得を短時間で行うことができる磁気マッピング装置を提供する。
【解決手段】 磁気ソース2と、支持体16と、支持体に取り付けられ磁界中の磁気データを測定する磁気センサ3と、支持体の外表面に取り付けられ磁気センサに対する位置が固定された少なくとも3つのマーカ群18と、3つのマーカを同時にステレオ視するための一対のカメラ12、14と、一対のカメラで撮影された各画像に同時に映る3つのマーカの画像上の位置に基づいてこれら3つのマーカの位置座標を求めるとともに求めた3つのマーカの位置座標に基づいて磁気センサの位置座標を算出する磁気センサ位置算出部21と、算出された磁気センサの位置座標とカメラ画像の撮影時に測定された磁気データとに基づいて位置座標と磁気データとを対応付けた磁気マッピングデータを蓄積する磁気マッピング部22とを備える。
(もっと読む)
回転角度検出装置
【課題】磁気感知素子による出力信号に基づき被検出回転体の回転角度を検出するにあたってその出力信号の振幅値やオフセット値にずれが生じた場合であれ、被検出回転体に対する検出精度をより好適に維持することのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を90度だけ位相のずれた正弦波信号A、Bとして感知する3つのホール素子対111a〜111cを有している。これら3つのホール素子対111a〜111cは、各々傾けて配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111cの別に上記クランク軸300の回転角度θを「θ=tan−1(A/B)」の演算式に基づいて算出する。次いで、算出した3つの信号の位相関係を維持しつつそれらの平均値を演算する。
(もっと読む)
マルチレンジ間隙測定システム及びそれを動作させる方法
【課題】静止物体(44)と可動物体(42)との間の間隙を測定するためのシステム(12)を提供する。
【解決手段】本システム(12)は、静止物体(44)上に配置されるように構成されかつ可動物体(42)に対応する作動パラメータを測定するように構成された少なくとも1つのセンサ(58)と、少なくとも1つのセンサ(58)に結合されたコントローラ(64)とを含み、コントローラ(64)は、測定した作動パラメータに基づいてセンサ(58)の動作モードを制御するように構成される。
(もっと読む)
41 - 60 / 101
[ Back to top ]