
Fターム[2F063BD16]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の測定したい部分,その他の特徴 (463) | 対象物自身が移動しているもの (219) | 対象物自身が回転しているもの (101)
Fターム[2F063BD16]に分類される特許
81 - 100 / 101
車両の車輪の、右側又は左側の位置を決定する方法、及び、位置決定装置

【課題】応答性の点で非常に効率的な右側/左側の位置決定プロシージャを提供すること。
【解決手段】車輪に装備した2つの磁気センサの最大感度軸は、車輪の回転軸に交差する面内で相互に所定の角度θだけオフセットされており、車両が所定の走行方向に移動する際に、磁場を変化することによって発生された、角度(+又は−)θに等しい角度値だけ相互に位相シフトされた2つの周期的な、車輪の1回転中磁気センサによって検出される磁場の値の変化を示す信号を、磁気センサの各々の端子で測定し、位相シフトから、車輪の回転方向を決定し、この回転方向及び車両の走行方向から、車輪の位置が、右側又は左側にあるのか推定する。
(もっと読む)
Vベルト用異常検出装置

【課題】Vベルトの異常をより早期に検出可能なVベルト用異常検出装置を提供する。
【解決手段】駆動プーリ3および従動プーリ4を固定シーブ3b、4bおよび可動シーブ3c、4cで構成する。可動シーブ3c、4cを固定シーブ3b、4bに近接離間自在にする。駆動プーリ3および従動プーリ4にVベルトを掛巻して無段変速機2を構成する。可動シーブ4cのシーブ位置の異常状態を検出するセンサー6を設ける。Vベルト5の側面摩耗および伸びによる異常をシーブ位置の異常状態として検出する。Vベルト5の異常を初期の段階で認知できる。
(もっと読む)
操舵角検出装置
【課題】 ステアリングシャフトを静止したままで絶対操舵角が検出でき、多回転でも操舵角が検出できる操舵角検出装置を提供する。
【解決手段】 ステアリングシャフト1と一体的に回転する径Rの主ローラ2と、主ローラ2に外接し径r1の第一差動ローラ3と、主ローラ2に外接し径r2(r1<r2<R)の第二差動ローラ4と、第一差動ローラ3の回転角θ1を±180°の範囲で検出する第一回転角センサ5と、第二差動ローラ4の回転角θ2を±180°の範囲で検出する第二回転角センサ6と、2つの回転角θ1,θ2で定義される位相差αに基づいてステアリングシャフト1の操舵角Φを演算する演算回路とを備えた。
(もっと読む)
相対位置検出装置及び鞍乗り型車両
【課題】 誤動作が発生し難いと共に、コンパクトに、且つ、安価に構成できる相対位置検出装置を提供する。
【解決手段】 互いに相対変位可能なアクセル11及び筐体を有し、アクセル11には永久磁石17が配設され、筐体には永久磁石17により形成される磁場の磁束密度から全閉位置θoの検出信号を出力するデジタルホールIC21が配設された相対位置検出装置であって、その永久磁石17は、S極とN極とが、相対変位方向に並んで配置される一方、そのデジタルホールIC21は、アクセル11と筐体とが相対変位する全範囲において永久磁石17からの磁力を常に受けるように構成された。
(もっと読む)
相対位置検出装置及び鞍乗り型車両
【課題】 相対位置の変化をより効果的に長い範囲に渡って検出できるようにすると共に、コンパクトに、且つ、安価に構成できる相対位置検出装置を提供する。
【解決手段】 互いに相対変位可能なアクセル11及び筐体12を有し、アクセル11には永久磁石17が配設され、筐体12には、永久磁石17の磁場の磁束密度が単調変化する範囲内に、この磁束密度の変化を検出するリニアホールIC22が配置された相対位置検出装置であって、永久磁石17は、第1N極部17cと第2S極部17eとが、相対変位方向に並んで配置され、その第2S極部17eには、端面17g側に向けて板厚が薄くなるような傾斜面17hが形成された。
(もっと読む)
近接センサを使用した耐放射線回転検出装置による高精度位置検出制御方法及びこの方法に使用する装置
【課題】
構造が簡単な近接センサを使用した耐放射線回転検出器を使用し、ステッピングモータのパルス制御を監視することにより、高放射線環境下においても当該ステッピングモータによる直線移動対象物体の高精度の直線位置の検出、制御を可能にした。
【解決手段】
ステッピングモータ1の回転運動を直線運動に変換する直線移動機構2を介して移動対象物体5を直線移動させる装置において、上記ステッピングモータ1の回転軸1aに接続された同期回転軸7を軸支した回転検出装置6を設け、この同期回転軸7に羽根車8を設け、この羽根車8の羽根8bの一つにそれぞれ対向する位置に第1近接センサPX−A及び第2近接センサPX−Bを固定し、これらの第1近接センサPX−Aと第2近接センサPX−Bとは、一方のセンサが上記羽根の一つに完全に対向したとき他方のセンサは上記羽根の他の一つに半分対向する位置になるように設けた。
(もっと読む)
無端ベルト用エレメント検査方法及び検査装置
【課題】 検査の手間を省き、且つ、アセンブリを分解することなく、しかも、検査結果の再現性を高めるようにした無端ベルト用エレメント検査方法及び検査装置を提供する。
【解決手段】 ベルト式無段変速機に用いられる無端ベルト(1)の構成部品であるエレメント(3a)の検査装置(10)において、前記無端ベルトに周回運動を与える運動付与手段(13)と、周回運動中の前記無端ベルトのエレメントの積層周期を計測する計測手段(15、17)と、前記計測手段の計測結果を所定の基準周期と比較して前記エレメントの積層異常箇所を判定する判定手段(18)とを備えたことを特徴とする。
(もっと読む)
回転飛翔体の回転角計測制御方法及び回転飛翔体
【課題】本発明は、回転飛翔する飛翔体内のコイルから地磁気を界磁として発生する電圧波形を用いて基準方位信号を得ることを目的とする。
【解決手段】本発明による回転飛翔体の回転角計測制御方法は、コイル(c)を設けた飛翔体(1)を発射し、中心軸を回転中心として回転する飛翔体(1)内のコイル(c)から地磁気(B)を界磁として発生する電圧波形(V)から飛翔体(1)の空間における回転角度である基準方位信号を得る方法である。
(もっと読む)
ミラー及び角度検出装置
【課題】鏡面の傾斜角度を適切に検出する。
【解決手段】車両用のミラーであって、鏡面と、鏡面を傾けるアクチュエータ100と、アクチュエータ100が鏡面を傾けた場合に、鏡面の傾斜角度の変化量に応じた回転角だけ、向きを変更する磁石と、磁石の向きに基づき、鏡面の傾斜角度に応じた信号を出力する信号出力部124とを備える。
(もっと読む)
ステアリングホイール角度を検出する装置と方法
【解決手段】
この発明は、ステアリングホイール角度を検出する装置に関し、ステアリングホイール(9)の少なくとも一回の完全な回転に一致する角度範囲に第一精度により測定する絶対測定の角度センサー(10)と、第一出力信号を供給し、その信号からステアリングホイール(9)の角度状態の変動が第一精度より大きい第二精度で検出でき、且つ第二出力信号を供給し、ステアリングホイール(9)が少なくとも二つの基準ステアリングホイール角度を組み入れできる少なくとも一つの所定状態を採用する増加測定の角度センサー(11)並びに角度センサー(10、11)と接続された評価ユニット(12)を包含し、評価ユニット(12)が絶対測定の角度センサー(10)により決定された出力値から出発して増加測定の角度センサー(11)の第一出力信号に従ってステアリングホイール角度を検出され、そして評価ユニット(12)がステアリングホイール角度を第二出力信号の発生の際に基準ステアリングホイール角度の一方に適合させる。
さらに、この発明は、ステアリングホイール角度を検出する方法に関する。  (もっと読む)
(もっと読む)
多方向距離無接触測定器
複数の誘導素子(1、4、7)を有し、電気的導体(2、22)の多方向における距離(10、20)を無接触で測定する装置。複数の誘導素子(1、4、7)のうち、少なくとも一つは本質的に電気的導体(2)の周りに配置されている。他の誘導素子、あるいは他の磁場センサー(4、7)は当該誘導素子(1)の近傍に配置されている。このような特徴を有する装置は、多軸誘導センサーを単一の回路基板上に集積することを可能とする。 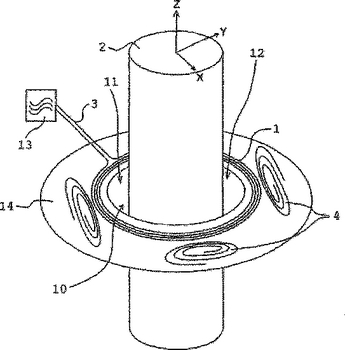 (もっと読む)
(もっと読む)
チェーン稼働状態測定装置
【課題】チェーン性能を簡単にかつ低コストで測定することができる、チェーン稼働状態測定装置を得ることにある。
【解決手段】被測定部材(10)に固定される半導体ひずみゲージ(20)と、半導体ひずみゲージの出力を無線送信する被測定部材に固定される集積回路からなる送信モジュール(30)と、半導体ひずみゲージ及び送信モジュールに電力を供給する被測定部材に固定される小型電池(40)とからなる。
(もっと読む)
エンコーダ用磁気センサ、センサアセンブリ及びレンズ鏡筒
【課題】 取り付け精度及びロール方向の傾きに基づくギャップ変動を低減することができるエンコーダ用磁気センサ、センサアセンブリ及びレンズ鏡筒を提供する。
【解決手段】 エンコーダ用磁気センサは、回転筒にその円周方向に沿って取り付けられておりかつ所定の着磁ピッチで着磁されている磁気媒体の表面に摺動面が接触することによって磁界検出を行う。摺動面の着磁ピッチ方向の幅は回転筒の直径の3/500以下である。
(もっと読む)
回転角検出装置
【課題】 車両運転時以外には角度位置の追跡をしなくても、ステアリングの絶対回転角度を検出可能として、消費電力を低減する。
【解決手段】 ステアリングシャフト1に対して回転方向には一体で軸方向にはスライド可能のロータ10にスクリュー12を形成し、これをベースのナット部5に噛み合わせ、回転に応じて軸方向に移動可とする。ロータは厚さが徐々に増大する帯状の永久磁石を螺旋状に巻きつけた軸傾斜永久磁石20と駆動歯車14を備え、軸傾斜永久磁石の外周面にホール素子を対向させる。駆動歯車に噛み合う従動歯車31には永久磁石32を固定し、これに対向させてAMRセンサ33を配置する。ホール素子が対向する軸傾斜永久磁石は操舵の全角度範囲にわたって厚さが変化するので、その出力から現在の粗の絶対回転角度が得られる。これと高分解能のAMRセンサの出力とに基いて、高精度の絶対回転角度を得る。
(もっと読む)
無接触可変電圧器
【課題】 所望の回転範囲でリニアな出力を得ることのできる無接触可変電圧器を提供する。
【解決手段】 N極とS極を持つ円形状の回転可能とした磁石40の基準位置で磁気センサ60A の感磁部が磁石40のN極とS極の境界位置に対向する位置に磁気センサ60A を配置し、この磁気センサ60A より90°の角度を持たせて磁気センサ60B を設け、−45°〜+45°の範囲は、磁気センサ60A の出力をそのまま出力し、磁石40が基準位置より+45°回転し、その後の+45°〜+135°の範囲は、磁気センサ60B の出力を磁気センサ60A のリミッタによる保持出力に加算して出力し、磁石40の回転する−45°〜+135°の180°の範囲で回転角に応じてリニアに変化する出力電圧を得る。
(もっと読む)
無接触可変電圧器
【課題】 1操作軸による所望の回転範囲の回転に応じて得られる出力が、複数個の異なる出力特性を持ち、これらを個別に出力し得る無接触可変電圧器を提供する。
【解決手段】 円形で操作軸に取り付けられて操作軸と一体的に回転する磁石40のN極とS極の境界部分の一方の外周部に切欠き40aを形成し、磁石40が基準位置にあるときに、切欠き40aに対向して第1の磁気センサ60A を配置し、N極とS極の境界部分のもう一方の外周部に対向して、第2の磁気センサ60B を配置し、第1と第2の磁気センサ60A 、60B の各出力をコネクタ55を介して個別に出力可能に構成しておき、磁石40の回転に応じ、第1と第2の磁気センサ60A 、60B より、それぞれ操作軸の回転に応じた出力電圧を導出する。
(もっと読む)
携帯情報端末機
【課題】 多機能化が進んだ場合であっても、部品点数を増大させることなく小型化を実現でき、且つ筐体を回転させる簡単な操作で、使用する機能の変更を実現できる。
【解決手段】 操作キーを配置した第1の筐体2と、液晶面を配置した第2の筐体4とが2軸ヒンジ5により開閉及び回転自在に結合された携帯情報端末機1において、第1筐体と第2筐体の相対位置を検出する相対位置検出手段は、第2筐体内で、2軸ヒンジの回転軸7を中心とした同心周回上に配置された複数の磁気センサ6a〜6dと、第1筐体内で、磁気センサの回転動作に伴う軌跡上に磁界を発生させるように配置された磁石9とを有して構成され、第1筐体又は第2筐体の厚さ方向に対向して配置される上記磁気センサ6aと6d、6bと6cは、互いが検出する磁力線の検出方向11aと11d、11bと11cが反対方向となるように設けられる。
(もっと読む)
座標測定機械用プローブヘッド
【課題】低いコストで、3つの座標方向における高分解能の測定を可能にする。
【解決手段】ハウジング12内に弾力性をもって吊り下げられた探針18を備えた座標測定機械用のプローブヘッド10。センサー構成26は前記ハウジング12に対する前記探針18の片寄りを検出する。前記センサー構成26は、磁石34と前記磁石に近接して配設されたホール素子36とを有する少なくとも1つのホールセンサーを備えている。前記探針18が片寄ると、前記磁石34が磁石34のN極とS極とによって規定されるその軸方向において前記ホール素子36に沿ってその側方を通過する。極性の変化するホール電圧が前記ホール素子36で得られる。極性が反転する点付近にあるホール電圧の直線的な範囲が、探針18の片寄りを表す量として処理される。 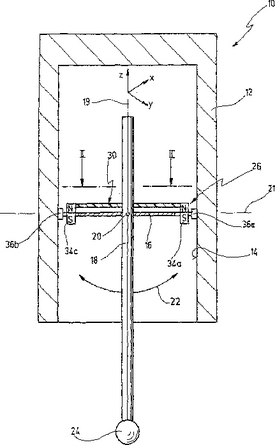 (もっと読む)
(もっと読む)
回転検出装置
【課題】バイアス磁石の中空部に磁気抵抗素子を有するセンサチップが挿入されるかたちで磁気抵抗素子とバイアス磁石とが位置決めされる構造を採りながら、より容易にそのセンシング感度の向上を図ることのできる回転検出装置を提供する。
【解決手段】回転検出装置は、磁気抵抗素子を備えるセンサチップと該センサチップの周囲を囲繞する態様で配されて上記磁気抵抗素子にバイアス磁界を付与するバイアス磁石15とが一体に組み付けられて構成されている。このバイアス磁石15は、上記センサチップを収容する中空部16を有している。この中空部16は、その断面形状が上記センサチップの磁気抵抗素子に作用する磁気ベクトルの振れ角を調整可能な形状に形成されている。この中空部16の形状としては、例えばその中空部16の内側壁に三角溝17が形成されたものが採用される。
(もっと読む)
エンジン位置を検出するための装置および方法
エンジンの位置を検出するための装置(1)が:
・回転部材(8)と固定部材(6)を有するセンサ(2)を有し、該固定部材は、
・固定部材に対する回転部材の位置に基づいて第1信号を発生する手段と、
・第1信号に対して位相シフトされた第2信号を発生する第2手段と、
・第2信号の値を基準値と比較する手段と、
・第1信号における少なくとも1つの特徴的イベントを検出し、2進形式の第3信号(36)を発生し、少なくとも1つの特徴的イベントが検出された後、比較結果がポジティブであれば、2進信号を第1値から第2値に変化させる手段とを有し、
・第3信号(36)の変化を検出する手段(50)とカウンタ(56)とを備えるエンジン制御手段(4)を有する。  (もっと読む)
(もっと読む)
81 - 100 / 101
[ Back to top ]