
Fターム[2F063CA02]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 測定系の異常検出 (90)
Fターム[2F063CA02]の下位に属するFターム
断線検出 (6)
Fターム[2F063CA02]に分類される特許
21 - 40 / 84
回転角検出装置及び電動パワーステアリング装置
【課題】レゾルバが出力するセンサ信号の何れかに異常が生じた後においても、正常なセンサ信号を特定して、その回転角検出を継続することのできる回転角検出装置を提供すること。
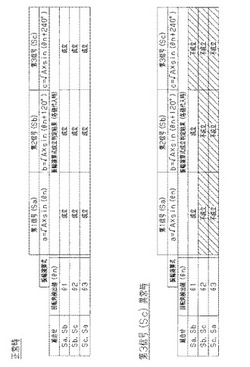
【解決手段】各センサ信号Sa,Sb,Scの振幅値a,b,cに基づいて、これら各センサ信号Sa,Sb,Scにおける任意の二信号の組み合わせ数に対応した複数(3つ)の回転角検出値(θ1,θ2,θ3)を演算する。また、各センサ信号Sa,Sb,Scが正常である場合における当該各センサ信号Sa,Sb,Scの振幅最大値(√A)を保持する。そして、その保持する振幅最大値(√A)、及び検出される各振幅値a,b,c、並びに各回転角検出値θ1,θ2,θ3を代入した場合に、その振幅演算式が成立する組合せが存在するならば、当該成立した振幅演算式に対応するセンサ信号は正常であると判定する。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置

【課題】サンプリングタイミングと励磁周期との同期の問題を解消して、より一層の性能向上を実現することができる回転角検出装置を提供すること。
【解決手段】励磁信号S_eを出力する制御マイコンとは独立に設けられた監視マイコンは、レゾルバの出力する各相のセンサ信号Sa,Sb,Scを独自にサンプリングし、その各サンプリング値a,b,cに基づいて、該各センサ信号Sa,Sb,Sc間における二信号の組み合わせ数に対応する3つの回転角検出値(θ1,θ2,θ3)を演算する。そして、その該各回転角検出値間の差分、及びその総和を監視することにより、回転角検出過程における異常判定を実行する。また、監視マイコンは、各センサ信号Sa,Sb,Scと同一のタイミングで励磁信号S_eをサンプリングする。そして、そのサンプリング値Rが「負」である場合には、上記各サンプリング値a,b,cの符号を反転して、上記各回転角検出値の演算を実行する。
(もっと読む)
センサ装置
【課題】検出コイル及び制御基板を水や油、異物等から保護可能なセンサ装置を提供する。
【解決手段】上面に長孔121aが形成されたセンサ収納部11A及び前面が開口した基板収納部11Bが挿通孔113cを有する内壁113によって隔てられる中空箱型のケース1と、前後方向に巻回される検出コイル21を有してセンサ収納部11Aに配設されるコイルブロック2と、筒状に形成されてコイルブロック2が挿通し、前端が挿通孔113c周縁に気密接合されるコイルホルダー3と、導電性材料から筒状に形成されてコイルホルダー3が挿通するスライドパイプ41を有し、検知対象物の変位に応じて前後方向へ移動自在に配置されるスライダー本体4と、基板収納部11Bに配設されて検出コイル21と接続され、検出コイル21のインダクタンス変化に基づく信号を出力する制御基板5と、基板収納部11Bの開口に覆設されて密閉する蓋部材13とを備える。
(もっと読む)
変圧器の健全性診断方法、健全性診断装置及び健全性診断プログラム
【課題】変圧器の上蓋を開閉することなく、さらに、手間が少なく短時間で巻線の位置ずれの有無を判定することができるようにする。
【解決手段】変圧器の1次巻線と2次巻線とのどちらか一方の巻線を開放した状態で共振が現れる周波数帯における他方の巻線の伝達関数を測定することを健全状態と点検時とで行い(S1−1,S1−2)、健全状態の伝達関数における共振周波数と点検時の伝達関数における共振周波数とを比較する(S2−1,S2−2,S3)ことによって巻線の位置ずれの有無に基づいて変圧器の健全性を判定する(S4)ようにした。
(もっと読む)
位置検出装置及びシフトレバー装置
【課題】検出手段が故障しても、位置検出に際して誤判定を生じ難くすることができる位置検出装置及びシフトレバー装置を提供する。
【解決手段】シフトレバー3に磁石を設け、装置本体2にMR素子1を設けて、MRセンサ1により磁石の磁界を検出することで、シフトレバー3の操作位置を判定する。シフトレバーはモーメンタリ式をとり、中立位置から他の位置に操作されると、その後、元の中立位置に自動で復帰する。また、MR素子1のセンサ出力で位置判定を行うに際して、シフトレバーが行きと帰りの動きをとるとき、MR素子1の出力が2回変化、つまり往復変化する。よって、MR素子1のセンサ出力が往復変化をとることを確認すると、シフトレバー3を操作有りと判定する。
(もっと読む)
位置検出装置及びシフトレバー装置
【課題】故障対応のために重系をとっても、検出手段の個数を少なく抑えることができる位置検出装置及びシフトレバー装置を提供する
【解決手段】2重系の第1位置検知MR素子11a,11bと、同じく2重系の第2位置検知MR素子12a,12bとを設けて、シフトレバーの操作方向を検出する。また、これら素子の中間位置に、1つの移動検知MR素子13を設けて、シフトレバーの移動有無を検出する。これにより、2重系の下、シフトレバーの位置を上中下の3位置で検出する。移動検知MR素子13は単にシフトレバーの移動有無を検出できればよいので、単なる1つのMR素子1で済む。よって、位置検出装置5を2重系3位置検出としても、従来のところMR素子1が6個必要であったのが、合計5個で済み、MR素子1を1つ削減することが可能となる。
(もっと読む)
空調空気吹出しノズル制御装置
【課題】角度検出器に角度検出専用センサを使用せず磁気センサを使用することで角度検出に関するコストを抑え、装置全体を安価に抑えた空調空気吹出しノズル制御装置を提供する。
【解決手段】回転体1に設けた磁石6と、回転体1と中心軸を同一とする非回転体に磁気センサ(ホール効果スイッチ9〜12)を設置して角度検出専用センサの代替とすることで装置の低コスト化を実現できる。また磁気センサはチップ状の形状であり、回転体1の回転軸の太さや構造に左右されないので角度検出専用センサを使用する時のような装置全体の大型化、高コスト化を防ぐことができる。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
故障診断装置、回転角度検出装置および故障診断方法
【課題】故障検出を、故障検出専用の回路などを別に設けることなく行うことができる技術を提供する。
【解決手段】第2の歯車の回転角度を検出する第1の回転角度センサと、第3の歯車の回転角度を検出する第2の回転角度センサと、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度との角度差に基づいて第2の回転軸の回転角度を演算する演算手段とを備える回転角度を検出する検出装置の故障を診断する故障診断装置であって、第1の回転角度センサが検出した第2の歯車の回転角度と第2の回転角度センサが検出した第3の歯車の回転角度とに基づいて、第2の歯車の回転角度と第3の歯車の回転角度との角度差が零となる交差角θKを算出し(S906)、交差角θKに基づいて故障を診断する(S907〜S910)。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
位置検出装置及びシフト装置
【課題】磁石に対する着磁パターン等を含む構成の簡素化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】各磁気センサ16a〜16gにおいて生成される二値信号の組合せがハミング符号をなすように磁石15の着磁パターン及び当該磁石15に対する各磁気センサ16a〜16gの相対的な位置関係が調節されている。このため、シフト装置では、1つの磁気センサに何らかの異常が発生した場合であれ、当該磁気センサにおいて生成される二値信号を含む誤った二値信号の組合せを訂正し、正しい二値信号の組合せとすることができる。さらに、2つの磁気センサに何らかの異常が発生した場合にも、その異常の発生を検知することができる。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】高い検出精度を有するとともに、構成簡素且つ省電力にて、連続的に検出対象の絶対角を検出することのできる回転角検出装置を提供すること。
【解決手段】ECU11(マイコン21)は、ステアリングセンサが出力する正弦信号S_sin及び余弦信号S_cosに基づいて、絶対角である操舵角θsを検出する。また、ECU11は、正弦信号S_sin及び余弦信号S_cosに基づいて、所定の回転角(電気角)に対応したエッジを有するとともにそれぞれの各エッジに対応する所定の回転角が互いに重複することなく且つ均等間隔となるように設定された三相のパルス信号P1,P2,P3を生成する三相パルス生成器30を備える。そして、マイコン21は、これらの各パルス信号P1,P2,P3に基づいて操舵角(第2操舵角θs´)を演算する第2の回転角検出手段としての機能を備える。
(もっと読む)
多回転角度検出装置
【課題】小型の多回転角度検出装置を提供する。
【解決手段】鍔状のギア形成部1aに歯数が異なる第1ギア11及び第2ギア12が同心に形成されたロータの回転軸Y−Yを含む平面に対して、磁石18を備えた第1従動ギア13の回転軸X1−X1と、磁石19を備えた第2従動ギア14の回転軸X2−X2とをそれぞれ直交させて配置する。
(もっと読む)
多回転角度検出装置
【課題】小型かつ安価にしてフェールセーフ性に優れた多回転角度検出装置を提供する。
【解決手段】歯数が異なる第1ギア11及び第2ギア12を回転軸Y−Yの周囲に同心に形成してなるロータ1と、第2ギア12と噛み合わされ、その回転軸X−Xがロータ1の回転軸Y−Yと交差する方向又は食い違う方向に配置された第2従動ギア14と、第1ギア11と噛み合わされ、その回転軸が第2従動ギア14の回転軸と同心に配置された中継ギア17と、中継ギア17と噛み合わされ、その回転軸が第2従動ギア14の回転軸と平行に配置された第1従動ギア13と、第1及び第2の従動ギア13,14にそれぞれ取り付けられた第1及び第2の磁石18,19と、第1及び第2の磁石18,19とそれぞれ対向に配置された第1及び第2の磁気検出素子20,21とを備える。
(もっと読む)
ストロークセンサ
【課題】センサコイルの故障時にも誤ったシフトレンジが検出されることを防止できるストロークセンサを提供する。
【解決手段】被検知体50の導体片51〜57は、スライダ41の下面に所定のパターンで2次元配置されている。具体的には、スライダ41の下面はY方向において各検知部61〜64にそれぞれ対応する4つの領域に区分され、各導体片51〜57は、各領域におけるX方向の所定の範囲にそれぞれ配置される。ここで、導体片51〜57の配置は、X方向において、シフトレンジごとに検知部60にて検知される導体片51〜57の組み合わせが異なるように設定される。しかして、シフトレンジが切り替わる度に、導体片51〜57を検知する検知部61〜64の組み合わせが変化し、検知状態となった検知部61〜64の組み合わせからシフトレンジを特定できる。
(もっと読む)
回転情報算出装置、軸受装置、モータ制御装置、ステアリング装置及び電動パワーステアリング装置
【課題】位置検出信号の異常検出に係る演算負荷を軽減することが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号(位置検出信号)のサンプリング値a、b、cからA相の回転角度位置θA4、B相の回転角度位置θB3、C相の回転角度位置θC4を算出し、それらが同等であるときには、それらの回転角度位置を正常な回転角度位置として算出出力する。一方、これらの回転角度位置が同等でない場合には、サンプリング値a、b、cの夫々に対応する理想角度データを算出し、それらを比較することで、異常の発生している磁気検出信号(位置検出信号)を特定する。また、異常の発生している磁気検出信号(位置検出信号)が1つだけである場合には、正常な残りの磁気検出信号(位置検出信号)を用いた回転角度位置を算出出力する。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 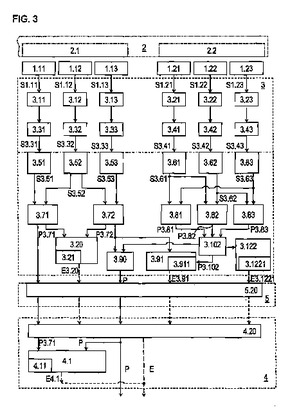 (もっと読む)
(もっと読む)
レゾルバの異常検出装置および電気式動力舵取装置
【課題】レゾルバに発生し得る多様な異常を検出可能なレゾルバの異常検出装置および電気式動力舵取装置を提供する。
【解決手段】レゾルバ35,37,44では、レゾルバ回転子の回転中心に対し均等に配置される各レゾルバコイル82a〜82cの他端が1つの接続点83にて電気的に接続されるとともに、この接続点83の電圧が所定の基準電圧に維持されている。そして、ECU60では、2乗和FsがF1<Fs<F2を満たさないこと(2乗和Fsが所定の第1範囲内にないこと)、および、加算値Faが|Fa|<F3を満たさないこと(加算値Faが所定の第2範囲内にないこと)の少なくともいずれか1つを満たす場合に当該レゾルバの異常が検出される。
(もっと読む)
位置検出装置
【課題】検出対象の変位を検出する検出回路に発生した異常をその動作電源をオンした際に即時に検出することができる位置検出装置を提供すること。
【解決手段】電源がオンされると、マイクロコンピュータ23は、まず第1ラインL1(出力端子−Vo1)をグランドに接続し、次に第2ラインL2(出力端子+Vo1)をグランドに接続し、最後に第1ラインL1(出力端子−Vo1)及び第2ラインL2(出力端子+Vo1)をグランドに接続する。マイクロコンピュータ23は、これら3つの接続状態としたときに、第1差動増幅回路26から出力される信号の電圧レベルと正常時に前記3つの接続状態としたときの出力信号の電圧レベルとの比較を行い、正常時と異なった電圧レベルの信号が入力されたときには第1磁気センサ20若しくは第1差動増幅回路26に異常があると判断する。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】制御手段10が第一の検出体2と第二の検出体3の回転角度から、回転体1の回転角度を各々算出すると共に、これらを比較することによって、各平歯車部に破損や消耗、あるいは各検出手段に誤差が生じた場合等には、第一の検出体2と第二の検出体3の回転角度から各々算出した回転体1の回転角度の差異によって、これらの不具合を検出することができるため、簡易な構成で、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
21 - 40 / 84
[ Back to top ]