
Fターム[2F063CA40]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 特定されたその他のもの (145)
Fターム[2F063CA40]に分類される特許
61 - 80 / 145
リニアセンサ

【課題】本発明は、第1コア体の両側に形成した各突出磁極に巻線を巻回し、第1コア体の両側に各凹凸部を有する第2コア体を設け、第1、第2チャンネルセンサを形成することを目的とする。
【解決手段】本発明によるリニアセンサは、両側に突出する複数の第1、第2突出磁極(2,2A)を有する第1コア体(1)と、前記第1コア体(1)に対応して配設された第2コア体(6)と、前記第2コア体(6)の各内壁(6a,6b)に形成され前記第1、第2突出磁極(2,2A)に対応する第1、第2凹凸部(7,7A)とを備え、前記各第1突出磁極(2)側で第1チャンネルセンサ(20)を形成し、前記第2突出磁極(2A)側で第2チャンネルセンサ(30)を形成する構成である。
(もっと読む)
リニアセンサ

【課題】本発明は、第1コア体の両側に形成した各突出磁極に巻線を巻回し、第1コア体の両側に第2コア体の複数の突出磁極を対応させ、第1、第2チャンネルセンサを形成することを目的とする。
【解決手段】本発明によるリニアセンサは、両側に突出する複数の第1、第2突出磁極(2,2A)を有する第1コア体(1)と、前記第1コア体(1)に対応して配設された第2コア体(6)と、前記第2コア体(6)の各内壁(6a,6b)に形成され前記第1、第2突出磁極(2,2A)に対応する複数の第3、第4突出磁極(15,15A)とを備え、第1、第2突出磁極(2,15)側で第1チャンネルセンサ(20)を形成し、第2、第4突出磁極(2A,15A)側で第2チャンネルセンサ(30)を形成した構成である。
(もっと読む)
障害物近接判定装置および障害物近接判定方法
【課題】接近する障害物を検知してその実体像および近接状態を判定すること。
【解決手段】障害物近接判定装置100は、静電容量センサ10と、超音波信号送受信器41〜4Nと、制御回路80とを備え、静電容量センサ10の検知電極11〜1Nは、自動車101の後方のバンパー102に配置された超音波信号送受信器41〜4Nの間にそれぞれ配置されている。制御回路80は、静電容量センサ10および超音波信号送受信器41〜4Nからの情報に基づいて、接近している障害物の材質的観点からの実体像および近接状態を判定する。
(もっと読む)
センサ付き転がり軸受装置
【課題】車輪のモーメント荷重や軸方向の並進荷重を求めることが可能なセンサ装置を備え、上記センサ装置と独立のABSセンサを設置しなくても、回転軌道部材の回転速度を検出することができるセンサ付き転がり軸受装置を提供すること。
【解決手段】ターゲット部材73の外周面で構成される被変位検出部の一部に、軸方向に延在する溝155を有する環状部150を形成する。
(もっと読む)
表面形状認証用センサの製造方法および表面形状認証用センサ
【課題】センサを構成する金属部材の形成装置の種類を少なくすること。
【解決手段】半導体基板の表面に層間絶縁膜を介して第1および第2導電配線をスパッタ法で形成し、第1および第2導電配線と層間絶縁膜を第1絶縁膜で覆い、第1絶縁膜の上に第2絶縁膜を積層し、第1導電配線上の第1および第2絶縁膜を除去し、それによって第2絶縁膜表面から第1導電配線に達する溝を形成し、第2絶縁膜と溝の側壁および底とを覆う導電膜をスパッタ法で形成し、前記導電膜の上から溝幅より広いレジスト膜で溝を覆い、レジスト膜をマスクとして前記導電膜と第2絶縁膜とを除去して第1絶縁膜を露出させ、レジスト膜を除去した後、第3絶縁膜をその表面が前記導電膜の表面と同一表面になるように第1絶縁膜上に形成する表面形状認証用センサの製造方法。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】信号の受信状況が不良な場合であっても現在位置を適切に測位すること。
【解決手段】地磁気検知部50による検知結果から現在位置の緯度を算出する。緯度によって地磁気ベクトルの伏角が異なるため、地磁気検知部50の検知結果から地磁気ベクトルの伏角を求めれば、現在位置の緯度を算出することができる。そして、捕捉したGPS衛星から受信したGPS衛星信号と、地磁気の検知結果から算出された緯度とに基づいて現在位置を測位する。
(もっと読む)
磁気式角度センサ
【課題】一対の磁気抵抗素子の薄膜ヨークが近接しても外部磁界の検出方向のずれの発生が抑制される磁気式角度センサを提供する。
【解決手段】磁気式角度センサ10によれば、基板14上に配置された一対の第1磁気抵抗素子16および第2磁気抵抗素子18が、それらの一対の薄膜ヨークの磁化容易方向が90°よりも所定角度2θだけ小さい角度Aとなるように予め配置されていることから、一対の第1磁気抵抗素子16および第2磁気抵抗素子18の薄膜ヨーク40、42が相互に近接させられてそれら薄膜ヨーク40、42に誘導される磁束が相互に影響するときに、一方の第1磁気抵抗素子16の一対の薄膜ヨーク40、42の磁化容易方向と他方の第2磁気抵抗素子18の一対の薄膜ヨーク40、42の磁化容易方向とが相互に略直角を形成するようになるので、外部磁界Hの検出方向のずれの発生が好適に抑制される。
(もっと読む)
渦電流センサのプローブ
【課題】渦電流センサのプローブにおいて、コイルを封止するコイルケースの破損を抑止して、プローブの長寿命を実現するための構造を提案する。
【解決手段】一端閉塞の筒状のコイルケース25と、前記コイルケース25内に挿入された円柱形状の中芯23とで、封止された空芯コイル22を備えた渦電流センサ16のプローブ20において、前記中芯23を軸方向に複数に分割して、複数の短円柱形状部材で構成する。さらに、前記コイルケース25と前記中芯23とを同一材料で構成する。
(もっと読む)
流体圧シリンダ用位置検出装置
【課題】流体圧シリンダを決められた設置箇所に設置した状態では、流体圧シリンダに取り付けられた位置検出装置の取付け位置を手作業で調整不可能な場合であっても、位置検出装置から適正な検出信号を出力することが可能な状態に調整することができる流体圧シリンダ用位置検出装置を提供すること。
【解決手段】ワンチップマイコン42は、磁気センサSa〜Sdを順番に動作をさせて、磁気センサSa〜Sdがピストンの位置を検出できるか判定し、検出できた場合には、そのとき動作させた磁気センサSa〜Sdを動作させるように設定する。また、ワンチップマイコン42は、磁気センサSa〜Sdの動作範囲が重なっている場合も考慮して、ピストンの位置を動作範囲としているすべての磁気センサSa〜Sdを選択するようになっている。
(もっと読む)
回転角センサ及びスロットル装置
【課題】磁気検出素子の出力特性の悪化を防止する。
【解決手段】回転側部材に設けられる磁石の磁力を受けて該回転側部材の回転角を検出する磁気検出素子56と、磁気検出素子56のセンシング部57を保護するサポート部材70とを備える。磁気検出素子56とサポート部材70とがインサートモールド成形によりハウジング部材68に一体化される。サポート部材70が、ハウジング部材68の樹脂材料の融点よりも高い融点を有する樹脂材料により形成される。
(もっと読む)
車輪用転がり軸受装置
【課題】温度ドリフトの発生を防止して、センサの信頼性をさらに高めることができる車輪用転がり軸受装置を提供する。
【解決手段】車体側に固定される筒状の固定軌道輪1と、この固定軌道輪1の内部に回転自在に挿通される回転軌道輪2、3と、これらの軌道輪の間に転動自在に配設される複列の転動体5とを備えた車輪用転がり軸受装置H。前記回転軌道輪2、3の車両インナ側端部の外周面とのギャップを検出する複数の変位センサ24を周方向に有する円環状のセンサハウジング16の車両アウタ側端部が、前記固定軌道輪1の車両インナ側端部内周面に圧入されており、且つ前記変位センサ24が合成樹脂又はゴム系材料で被覆されて前記センサハウジング16と一体化されている。
(もっと読む)
移動体の位置検出システム
【課題】 RFIDタグを用いた展示場等の入退出管理システムは、RFIDタグをリーダに近づけないと検出できず、また入場と退場を区別することができないので、取り扱いが不便であったという課題を解決する。
【解決手段】 移動体の位置を知りたい場所に磁気発生装置を固定し、移動体が装着した位置検出センサで磁束強度と向き、および位置検出センサのIDを無線で送信する。ホストコンピュータはこの送信されたデータを受信して、磁束強度またはその変動パターンから磁気発生装置を特定し、移動体の位置を知る。また、磁気発生装置が特定できないときは地磁気と判断し、検出した磁気の向きから移動体の進行方向を特定する。検出範囲を広く取ることができ、かつ移動体の進行方向がわかるので、展示場などで入場と退場を区別することができる。
(もっと読む)
位置検出装置、ブレ補正装置、レンズ鏡筒及び光学機器
【課題】検出精度が向上した位置検出装置等を提供する。
【解決手段】磁気検出素子61を磁気発生部62と磁気発生部63との間に配置した。
(もっと読む)
容量センサーを用いて自動車シートに着座した乗員の形態を識別する改良方法
【課題】自動車シートに着座している乗員の形態を識別する方法を提供する。
【解決手段】(i)シートの横断面に実質的に及んで複数の容量センサー一式を内蔵する工程、(ii)前記シートに内蔵された複数の前記容量センサーから発せられる出力を収集する工程、(iii)前記シートに対向する標的物の形態を、前記出力から測定される、前記標的物及び前記容量センサーが離れている距離、並びに、前記標的物によって覆われた前記センサーの表面量に基づいて、決定する工程、及び、(iv)決定された前記形態を複数のレファレンス形態から分類するために、決定された前記形態と少なくとも1つのレファレンス形態とを比較する工程を含む。
(もっと読む)
平面位置決め装置
【課題】 レーザ測長器等の絶対位置測定手段を外部に配置することなく、ライダの原点絶対位置情報を取得することができる平面位置決め装置を実現する。
【解決手段】 X軸方向及びY軸方向に多重化された推力発生用モータコアを有するスライダを、プラテンの上面でX軸方向またはY軸方向にスライドして位置決め制御する平面位置決め装置において、
前記スライダの原点復帰時に、前記多重化されたモータコアのコア巻線を、前記プラテンに形成された歯と前記モータコアに形成された歯との相対位置を検出するレゾルバ型位置検出手段のセンサーとして使用する。
(もっと読む)
雨水貯留槽及び雨水貯留槽における遮水シートの損傷位置検出方法
【課題】雨水貯留槽自体の建設コストの増加を抑制しつつ、遮水シートにおける損傷の有無及び位置を簡単に検出する。
【解決手段】遮水シート20を介して地中に埋設された雨水貯留槽10において、遮水シート20の外側に面電極38を設置するとともに、遮水シート20の内側に雨水を介して通電用電極134と複数の測定電極132とを設置し、通電用電極134と面電極132との間に交流電流を印加して、複数箇所で交流電流と測定電極132,132間の電位差との位相差を測定し、この位相差の変化を調べて遮水シート20の損傷位置を特定する。
(もっと読む)
薄片状の被測定物の形状測定方法およびその装置
【課題】薄片状の被測定物の厚さ分布および反り形状を同時にかつ高精度に測定できる形状測定方法およびその装置を提供する。
【解決手段】対向する一対の静電容量センサ2,2’を、被測定物Sを挟んで昇降可能に配置し、上部の静電容量センサ2を昇降させて被測定物Sとの間隙を略一定に保持するとともに、下部の静電容量センサ2’を、上部の静電容量センサ2の前記移動に追随させて移動させ、一対の静電容量センサ2,2’間の距離を一定に保持する。そして、上部の静電容量センサ2の移動量および一対の静電容量センサ2,2’で検出された被測定物Sとの間隙に基づいて前記被測定物の厚さおよび反り形状を求める。
(もっと読む)
作業機械におけるシリンダのストローク位置計測装置
【課題】 デテント解除位置を再設定するに際して、その調整を容易に短時間で行えるようにするとともに、近接スイッチの取り付け位置を微調整する場合と同様に広範囲で微調整できるようにする。
【解決手段】
シリンダ200には、磁気を媒体としてシリンダ200のストローク位置Stを検出するシリンダストロークセンサ300が設けられる。演算処理部400では、シリンダストロークセンサ300の検出信号Sとしきい値Tとが比較されて比較結果が出力される。たとえば、しきい値Tは、デテント解除位置に相当するシリンダストローク位置として設定される。しきい値調整部500では、しきい値Tの大きさが調整される。
(もっと読む)
内燃機関のクランク角度検出装置
【課題】回転方向の誤判定を防止し、クランク角度の基準位置を容易に検出できると共に、停止時もしくは始動時の気筒及びクランク角度の検出を可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121と、被検出部が通過する毎にそれぞれ第1クランク角信号と第2クランク角信号を発生する第1信号発生手段122と第2信号発生手段123、第1クランク角信号及び第2クランク角信号の状態からクランク軸の回転方向を判定する回転方向判定手段と、欠け歯領域が第1信号発生手段もしくは第2信号発生手段を通過しているかどうかを判定する欠け歯通過判定手段とを備え、回転方向判定手段は、欠け歯通過判定手段の判定結果に応じて、クランク軸の回転方向の判定方法を変えるようにしたもの。
(もっと読む)
導電性基材上の導電性被膜の膜厚の決定方法
本発明は、検査対象の導電性基材(50)上に形成された導電性被膜の膜厚の決定方法に関する。先ず、空気中での渦電流センサの誘起電圧(U(Luft,ω))が励磁器磁界の周波数(ω)の関数として検出される。それぞれ検査対象の基材(50)および被膜(52)と同じ材料からなる基材および被膜を含む複数の被覆された基準対象が準備される。基準対象は異なる既知の膜厚を有する。各基準対象についての基準電圧(U(x,w))が励磁器磁界の周波数(ω)の関数として渦電流センサにより検出される。引続いて、各基準対象について、周波数(ω)の関数としての基準電圧(U(x,w))および空気中での渦電流センサの誘起電圧(U(Luft,ω))から、材料誘起電圧(Umat(x))が求められる。その後、各基準対象について、材料誘起電圧(Umat(x))の正規化された振幅が形成される。これから、被膜(52)の膜厚(d1)の関数として材料誘起電圧(Umat(x))の正規化された振幅を表示する較正曲線が作成される。正規化された振幅が同じようにして検査対象についても求められるこれから、検査対象の被膜(52)の膜厚(d1)が較正曲線により決定される。 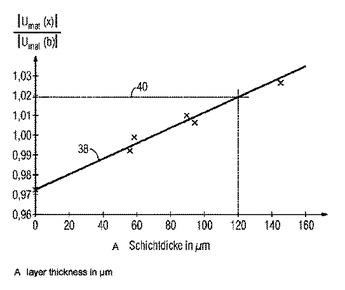 (もっと読む)
(もっと読む)
61 - 80 / 145
[ Back to top ]