
Fターム[2F063DA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定対象物を非接触で測定するもの (1,066)
Fターム[2F063DA01]に分類される特許
341 - 360 / 1,066
空孔付き光ファイバの空孔径の測定方法および装置、ならびに空孔付き光ファイバの製造方法および装置
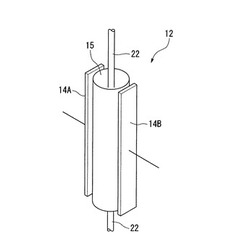
【課題】光ファイバに損傷を与えず、かつ生産性を高くでき、しかも適用範囲が広く、光ファイバの空孔径を精度よく測定できる空孔付き光ファイバの空孔径の測定方法および装置を提供する。
【解決手段】空孔付き光ファイバ母材を加熱し溶融させて線引きして得られた空孔付き光ファイバ22を、対向配置された一対の電極板14A、14B間に通過させる際に静電容量を測定し、この測定値に基づいて、予め実測により得られた静電容量と空孔径との相関関係を用いて空孔付き光ファイバ22の空孔径を算出する。
(もっと読む)
空間位置特定装置および特定方法

【課題】簡易な構成で容易に対象物の空間位置を特定することができる空間位置特定装置および空間位置特定方法を提供する。
【解決手段】三次元座標系に配置される磁界発生器2によって、Z軸と平行な向きに磁界Gを発生させて、第一基準点Aに配置される第一磁界検出器3によって、第一基準点Aと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第一基準線L1がX軸と成す角度である第一角度θ1を検出し、第二基準点Bに配置される第二磁界検出器4によって、第二基準点Bと磁界Gの発生点CをXY平面に投影した点C1とを通る直線である第二基準線L2がX軸と成す角度である第二角度θ2を検出し、原点Oに配置される第三磁界検出器5によって、原点Oと磁界Gの発生点CをYZ平面に投影した点C2とを通る直線である第三基準線L3がY軸と成す角度である第三角度θ3を検出して、磁界発生器2の空間位置を特定する。
(もっと読む)
直線移動量検出装置
【課題】直線方向の移動量を直接検出できる高精度で安価な直線移動量検出装置を提供する。
【解決手段】固定部10に対して、所定範囲Dxで直線移動する可動部20の移動量Xを検出する直線移動量検出装置101であって、固定部10または可動部20のいずれか一方に配置され、所定磁界Ba,Bbを発生する磁石20a,20bと、固定部10または可動部20のもう一方に、直線移動するX方向で所定間隔Lを置いて平行に配置される2個のホール素子10a,10bとを有してなり、2個のホール素子10a,10bの出力が、それぞれ、直線移動する所定範囲Dxにおいてsin関数またはcos関数で近似され、所定の位相差αを持つように、所定磁界Ba,Bbと所定間隔Lが設定されてなり、2個のホール素子10a,10bの出力と位相差αを演算して、可動部20の移動量Xを検出する。
(もっと読む)
角度位置センサを組み込んだスロットル制御部
【課題】容易で費用効果のある実施が可能な、角度位置センサを組み込んだスロットル制御部を提供すること。
【解決手段】管形状であり、管状ハンドルバー2の周りにはめ込まれ、管状ハンドルバー2に対して回転するように中央に穴が開いているツイストグリップ11と、ツイストグリップ11の角度位置を読み取るように適合された角度位置センサ16であり、ツイストグリップ11と一緒に回転するようにツイストグリップ11に支持されて、電界及び/又は磁界に影響するように適合された少なくとも1つのロータ17、及び、ロータ17の近くに配置されるように、管状ハンドルバー2内部の固定位置に取り付けられるように適合された、及び、ロータ17の向きを遠隔位置から無接触で読み取るように適合された、少なくとも1つの読取部18を有する角度位置センサ16と、を備えるスロットル制御部1。
(もっと読む)
マイクロメカニカル素子、マイクロメカニカル素子を監視するためのセンサ、マイクロメカニカル素子を操作する方法、マイクロメカニカル素子の監視方法、これらの方法を実施するためのプログラムコードを含むコンピュータプログラムおよびマイクロメカニカル素子の機械的固有共振に影響を与える方法
【課題】改良された特性を有するマイクロメカニカル素子およびマイクロメカニカル素子を監視するための空間を節約するセンサを提供する。
【解決手段】マイクロメカニカル素子100は、可動機能素子110と、第1から第4の保持素子120、130、140、150とを備える。第1の保持素子および機能素子が第1の接合122で接続され、第2の保持素子および機能素子が、第2の接合132で接続され、第3の保持素子および機能素子が、第3の接合142で接続され、かつ第4の保持素子および機能素子が、第4の接合152で接続される。また、第1の保持素子および第2の保持素子は、各々圧電駆動素子124、134を含み、第1の保持素子の駆動素子および第2の保持素子の駆動素子が、電気励起により機能素子を動かすよう構成される。
(もっと読む)
絶対位置検出装置
【課題】 特に、小型化且つ簡単な構成で、高精度なリニア出力を得ることが出来る絶対位置検出用の絶対位置検出装置を提供することを目的としている。
【解決手段】 磁石3と、磁石3からの外部磁界を受けて電気抵抗値が変動するGMR素子6,7を備えた磁気センサ2とを有する。前記磁石3は、前記磁気センサ2が間隔を空けた状態にて相対移動する移動面3aと、前記磁気センサ2の相対移動方向に直交する前記移動面3aの両側に設けられ、夫々異なる磁極に着磁された着磁面4,5とを有する。前記磁気センサ2が始端15から終端16へかけて移動すると、前記GMR素子6,7と前記移動面3aとの重なり面積が徐々に減少するように、前記移動面3aの幅寸法が前記相対移動方向に向けて徐々に縮小している。
(もっと読む)
機械的特性に基づくプローブの可視化
【課題】被験者体内のプローブの長さに沿って配置される複数のポイントにおいて、それぞれの見かけの座標を示す入力値を受信することと修正座標をもたらすことと、修正座標を用いてプローブの画像を表示することと、を含む可視化方法と可視化装置を提供する。
【解決手段】可視化方法には、被験者16体内のプローブ12の長さに沿って配置される複数のポイントにおいて、それぞれの見かけの座標を示す入力値を受信することと、体内のプローブにより想定可能な形状に対するコスト関数を計算するため、見かけの座標に対してプローブの既知の機械的特性モデルを適用することと、が含まれる。コスト関数に対して応答可能なように形状が選択され、その形状に基づきプローブの長さに沿ったポイントの修正座標がもたらされる。続いて、修正座標を用いたプローブの画像が表示される。
(もっと読む)
アクセレレーターポジションセンサー
【課題】別の保証コイルを具備せず、受信コイルだけで保証信号を得ることができるアクセレレーターポジションセンサーを提供する。
【解決手段】本発明によるアクセレレーターポジションセンサーは、オシレーターに繋がれて磁場を発生する送信コイルと、前記送信コイルから所定の間隔をおいて設置され前記送信コイルで発生する磁場を制御するカプラーと、前記送信コイルと前記カプラーの間に設置され前記送信コイルで発生する磁場を受信して交流周波数を発生する受信コイルと、前記受信コイルと繋がれて、前記受信コイルから得られる交流周波数を利用して前記カプラーの回転情報を演算してアクセル・ペダルの変位の値を出力する信号処理部と、を備えることを特徴とする。
(もっと読む)
角度位置センサを提供されるハンドルコントロール
【課題】 角度位置センサを提供されるハンドルコントロールを提供することである。
【解決手段】 ハンドルコントロール(1)は、中央貫通穴を提供されて、ハンドルバー(2)を中心に嵌合されるように適合され、このハンドルバー(2)にしっかりと固定される支持本体(3)と;管状の形状を有し、前記支持本体(3)によって回転式に運ばれて、前記ハンドルバー(2)に対して回転するために前記ハンドルバー(2)を中心に嵌合されるために中央にせん孔されているツイストグリップ(11)と;前記ツイストグリップ(11)の角度位置を読み込むように適合される角度位置センサ(16)とを具備する。この角度位置センサ(16)は、少なくとも1つのローター(17)と、少なくとも1つのリーダ(18)とを備える。
(もっと読む)
真空用エンコーダセンサおよびそれを備えた真空用モータ
【課題】真空用エンコーダセンサにおいて、ベーキングにより高い真空度を得ることができるようにする。
【解決手段】リード端子14を接続された磁気抵抗効果素子11と永久磁石15とをセンサケース17内に封止樹脂16で固定された真空用エンコーダセンサにおいて、(1)センサケース17と封止樹脂16との境界部、(2)リード端子14と封止樹脂16との境界部のうちの少なくともいずれか一方に鉛筆硬度が3H以下の緩衝樹脂層1を備えるようにした。
(もっと読む)
流体メニスカスを測定する装置
本発明は、流体メニスカス132の形状を測定するよう配置される装置102に関する。装置は、第1の導電性流体128及び第2の絶縁性流体324を保持する流体チェンバ104を有する。第1及び第2の流体は相互に混合することなく、それらの間に流体メニスカス132を定める。更に、メインエレクトロウェッティング電極118及び補助エレクトロウェッティング電極120,122,124,126が流体メニスカスの形状を制御するよう設けられる。これに、メインエレクトロウェッティング電極と補助エレクトロウェッティング電極との間に電圧を供給する電圧源134が、メインエレクトロウェッティング電極と少なくとも2つの補助エレクトロウェッティング電極との間のキャパシタンスを別々に測定する測定回路144とともに含まれる。このために、測定回路は、キャパシタンスを示す信号を復調するマルチプレクサを有する。本発明は、更に、流体メニスカスを測定する方法に関する。 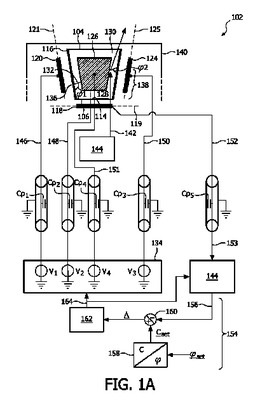 (もっと読む)
(もっと読む)
静電容量型距離センサ及び静電容量センサを備えた車高測定装置
【課題】静電容量の変化量に基づいて被測定面と静電容量センサとの間の距離を正確に測定することのできる静電容量型距離センサを提供すること。
【解決手段】静電容量センサ1により検出された静電容量の変化を検出電圧に変換する第1のCV変換器3と、被測定面Aからのオフセット距離に応じたオフセット容量を検出電圧に変換する第2のCV変換器6と、第1のCV変換器3と第2のCV変換器6からの差分電圧を検出する差分増幅器5とを備えている。静電容量の変化量に基づいて被測定面Aと静電容量センサ1との間の距離を正確に測定することができる。また、オフセット距離をメカニカルな機構によらずに非接触方式で直接的に測定が可能となる。
(もっと読む)
基板形センサ、変位センサ装置及び転がり軸受装置
【課題】軽量・コンパクトで簡素な構造のセンサ及びこれを備えた変位センサ装置を提供する。
【解決手段】金属製の検出対象物(例えば回転体12)の変位を非接触で検出する変位センサ装置に用いられる基板形センサ10であって、全体として所定の立体形状(例えば円筒状)を成すフレキシブルプリント基板2と、このフレキシブルプリント基板2を支持し、かつ、当該立体形状を維持する支持部11と、フレキシブルプリント2基板上の複数箇所において導電部を渦巻状に形成して成り、渦巻面が検出対象物と対向するコイル3とを備えたものとする。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で組立ても行い易く、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】ステアリングに連動して回転する回転体21に、モータ15との連結手段としての平歯車部21Bを形成することによって、回転体21にモータ15連結用の連結手段が一体に形成され、別部品を用いることなくモータ15の力をステアリング軸に伝達できるため、簡易な構成で組立ても行い易く、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
縁部分解能強化渦電流センサ
基板上の導電層の厚さを監視する装置は、導電層を有する基板を保持する支持部と、第1の複数のコア部分を含む渦電流監視システムと、支持部と渦電流監視システムとを互いに対して動かすことにより、第1の複数のコア部分を横切って、第1の軸を画定する方向に基板を移動させるモータとを含む。少なくとも1つのコア部分が、第2の軸から、少なくとも2つの他のコア部分よりもさらに遠くに配置される。第2の軸は、第1の軸と直交する。 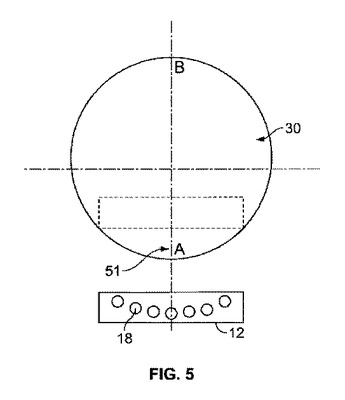 (もっと読む)
(もっと読む)
高周波誘導加熱装置による板端部検出装置
【課題】 加熱器の板端部からの脱落を防止できるようにする。
【解決手段】 高周波誘導加熱装置の加熱器5の上側に誘導加熱コイルと同心状に配置して設けた磁場検出コイル16と、磁場検出コイル16の出力値を基に板端部検出信号21を発信する端部検出器17から高周波誘導加熱装置による板端部検出装置を形成する。加熱器5が曲げ対象鋼板6の板端部に近付くと、加熱器5の誘導加熱コイルで発生させる交番磁束8を有する磁場により曲げ対象鋼板6の表面付近に誘導されている渦電流19が、板端部の制限を受けることで円形から変形させられ、これに伴い磁場に変動が生じるため、磁場検出コイル16の出力値が増大するようになることから、端部検出器17にて、検出される磁場検出コイル16の出力値がしきい値を越えるときに板端部検出信号21を発信し、この板端部検出信号21に基いて加熱器5の移動を停止させる。
(もっと読む)
ヘッドレスト位置調整装置およびヘッドレスト位置調整方法
【課題】簡単な構成で乗員による車両の操作に極力影響を与えずに自動的にヘッドレストの位置を調整する。
【解決手段】ヘッドレスト位置調整装置は、シート10に設けられたヘッドレスト13に内蔵された検知電極1および検出回路2と、演算回路5と、ヘッドレスト駆動モータ3およびモータ制御回路4とを備える。演算回路5は、検出回路2からの静電容量値に基づき搭乗者21の頭部22とヘッドレスト13との間の距離を演算し、モータ制御回路4は演算結果に応じてヘッドレスト駆動モータ3を制御し、ヘッドレスト13の位置を調整する。演算回路5は、車両信号出力回路6からの車両信号が特定信号である場合に、モータ制御回路4に対してヘッドレスト13の移動を停止またはヘッドレスト13の位置を原点復帰位置に移動させる演算結果を出力する。
(もっと読む)
渦電流探傷試験方法及び渦電流探傷試験装置
【課題】渦電流探傷試験法に特有の物理現象を利用することで長さ評価精度と汎用性が高い渦電流探傷試験方法及び渦電流探傷試験装置を提供する。
【解決手段】本発明は、中心軸方向と被検査面の法線方向が一致している第1のコイル12と、中心軸方向と被検査面の法線方向が一致しており、第1のコイル12と所定の中心間距離d1で配置される第2のコイル13とを有するプローブ11を用いて被検査面の欠陥15を検出し当該欠陥長さLを評価する渦電流探傷試験方法において、プローブ11を走査し被検査面の欠陥に起因する出力電圧分布を取得し、出力電圧分布に現れる二つの極大値を検出し、検出された二つの極大値間の長さd2を算出し、算出された極大値間の長さd2と第1のコイル12及び第2のコイル13の中心間距離d1を加算した結果を被検査面の欠陥長さLと評価する。
(もっと読む)
溶鋼の連続鋳造方法
【課題】本発明は、高品質の製品鋼材を得ることの可能な溶鋼の連続鋳造方法を提供することを目的としている。
【解決手段】水冷鋳型に溶鋼を連続的に注入し、別途投入したモールド・パウダで該溶鋼を覆うと共に、該溶鋼を電磁力で攪拌し、生成した凝固殻を前記鋳型から下方に引き抜きながら冷却を続け、完全に凝固した長尺の鋼鋳片とするに際して、モールド・パウダの溶融層の厚みを常時測定し、該測定値を予じめ定めたモールド・パウダの溶融層の厚みと該鋼鋳片もしくは該鋼鋳片を圧延して得た製品鋼材の欠陥発生率との関係に照らし、該鋼鋳片もしくは製品鋼材の欠陥発生率が所望値以下になるように、前記水冷鋳型での溶鋼の鋳造条件を変更してモールド・パウダの溶融層の厚みを調整する。
(もっと読む)
位置検出装置及びその位置検出装置を用いた電子機器
【課題】構成部品を汎用品や入手が容易な部品等により構成した場合においても、簡易な構成で小型化を実現することができると共に広範囲な距離を高精度に検出することが可能な位置検出装置を提供すること。
【解決手段】感磁方向が、配置された基板に対して垂直な磁気センサ2個を1組とした磁気検出手段を備え、この磁気センサ2個の中心を結ぶ直線および基板に平行に移動可能に支持し、この基板に対して垂直にN極とS極が着磁された磁石を配置した位置検出機構において、2個の磁気センサの出力をVaおよびVbとした場合に、磁石と2個の磁気センサの位置関係により、(Va−Vb)、(Va+Vb)、(Va−Vb)/(Va+Vb)を用いて位置検出を行う。
(もっと読む)
341 - 360 / 1,066
[ Back to top ]