
Fターム[2F063DA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定対象物を非接触で測定するもの (1,066)
Fターム[2F063DA01]に分類される特許
901 - 920 / 1,066
探知ブイ

【課題】 より確実な方法で移動体を探知等することができる探知ブイを提供する。
【解決手段】 電界を3軸方向の各成分でそれぞれ検知する電界センサ1と、電界センサ1の検知による信号を電界データとしてとして時系列に記録するデータ記録部12Bと、電界データの値が点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定したパラメータの値に基づいて少なくとも移動体の現在及び/又は将来の位置を検出する移動体探知器13とを備えている。
(もっと読む)
検出装置および認証装置

【課題】 参照信号の調整を要することなく特性のバラツキを補償する。
【解決手段】 検出装置100は、対象物の表面との距離に応じたレベルの検出信号Sdを各々が生成する複数のセンサ回路Uと、各センサ回路Uを選択して検出信号Sdを出力させる選択回路20と、レジスタ31に記憶された参照値Rに応じたレベルの参照信号Srefを生成するD/A変換回路32と、各センサ回路Uから出力される検出信号SdとD/A変換回路32が生成した参照信号Srefとのレベルの大小に応じた検出データDを生成する比較器35とを有する。CPU41は、比較器35が生成した複数の検出データに対する所定の演算によって空間周波数Fを算定し、この空間周波数Fに基づいてレジスタ31の参照値Rを更新する。
(もっと読む)
回転角度検出装置及び内燃機関の運転制御装置
【課題】 回転体の機械的誤差による影響を低減可能な回転角度検出装置及び内燃機関の運転制御装置を提供する。
【解決手段】 本発明の回転角度検出装置20は、内燃機関1のクランクシャフト8に取り付けられ、かつ複数の歯部21aが回転方向Dに沿って設けられた回転体21と、各歯部21aの前側エッジEf及び後側エッジEbのそれぞれを検出可能な電磁ピックアップ22及び波形整形器23と、を備え、検出された前側エッジEf又は後側エッジEbのいずれか一方を基準にしてクランクシャフト8の回転角度を検出する。そして、隣接する歯部21a間の角度で、前側エッジEfを基準とした角度θfと、後側エッジEbを基準とした角度θbとを算出し、これらの誤差Δθf,Δθbを比較して、前側エッジEf又は後側エッジEbのいずれか一方を回転角度の検出の基準として設定する。
(もっと読む)
非接触寸法測定器
【課題】 ノズルの浮上量を空気圧制御のみに依存すること無く安定化させることにより測定精度を向上することができる非接触寸法測定器を提供する。
【解決手段】 上部加圧室13に安定化された一定圧を供給し、下部加圧室14に電空レギュレータ22で制御された制御圧を供給する。下部加圧室14に供給された空気を、ノズル41下端の吹出口45から測定対象46の対象箇所へ向けて噴出する。ノズル41に静電容量センサ51を設け、静電容量センサ51から測定対象46までの離間距離を非接触で測定する。静電容量センサ51からの静電容量測定値53を静電容量アンプ52及び圧力コントローラ61を介して電空レギュレータ22に戻し、静電容量測定値53に応じて下部加圧室14への供給圧を制御するフィードバック回路71を構成する。
(もっと読む)
非接触寸法測定器
【課題】 ノズルの浮上量を空気圧制御のみに依存すること無く安定化させることにより測定精度を向上するとともに応答性を高めることができる非接触寸法測定器を提供する。
【解決手段】 上部加圧室13及び下部加圧室14に安定化された一定圧を供給し、下部加圧室14に供給された空気をノズル41の吹出口45から測定対象46の対象箇所へ向けて噴出する。ピストン12から延出した検出用ロッド31の変位量をデジタルスケール32で検出し、カウンタ33を介してデジタル演算部34に入力する。ノズル41に設けられた静電容量センサ51から測定対象46までの離間距離を非接触で測定して、静電容量センサ51からの静電容量測定値53を静電容量アンプ52及びA/D変換部61を介してデジタル演算部34に入力し、デジタル演算部34においてピストン12の変位量を浮上量54で補正した測定値を出力する。
(もっと読む)
媒体内に存在する対象物の位置検出方法および測定装置
本発明は、対象物(12)に相関する測定信号(UM)が形成され、そこから少なくとも1つの第1のステータス"対象物有り"(Z=a)と少なくとも1つの第2のステータス"対象物無し"(Z=b)とを区別する信号(Z)が形成される、媒体内に存在する対象物の位置検出方法に関する。本発明によれば、その時点での測定信号(UM)の値が先行して測定された局所的最大値(UMax,n)を設定された第1のパーセンテージ(P1)だけ下回る場合に、第1のステータス"対象物有り"(Z=a)から第2のステータス"対象物無し"への遷移が行われる。また本発明はこの方法を実行する測定装置、特に携帯可能な位置検出装置に関する。 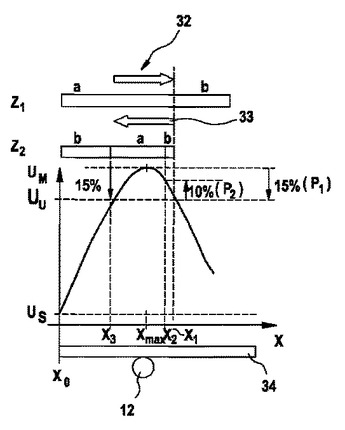 (もっと読む)
(もっと読む)
可動機械システムの位置を検知する方法及び装置
機械部品を含む可動素子の位置検知に関する。可動素子の動きによって磁場の動きを生成して、磁気センサで検出する。磁場及び/又は磁束の動き及び/又は変化は、センサ、対応する磁石、又は対応する磁性体の動きの組み合わせによって生成してもよい。磁気センサは、回転運動、線形運動の何れか、又は両方を測定できる。かかるセンサは、増分位置変化、絶対位置、又はその両方を表示できる。絶対位置及び高分解能位置検知は、線形運動及び/又は角運動の測定によって行える。好適な磁気センサとして、これに限定さないが、ホール効果装置及び/又は磁気抵抗素子が挙げられ、多極磁気センサを含んでもよい。電子制御装置などの信号調整及び/又は制御手段を用いてセンサからの出力信号を受信できる。 (もっと読む)
磁界センサ
磁界センサ、殊に車両の車両ホイールまたはドライブトレイン用の回転数センサおよび/または回転方向センサを提示する。この磁界センサは、センサ部材用の保持部と、場合によっては別のセンサ構成部材とを有している。保持部はプラスチック射出成形部分として構成されており、その読み取り側の端面領域においてポケット状切り欠きを有しており、当該ポケット状切り欠き内でセンサ部材はプラスチックによる最終の包理射出成形時に少なくとも射出成形プレス方向において支えられ、従って機械的損傷から確実に保護される。  (もっと読む)
(もっと読む)
レール継目検出器および軌道検測車のレール継目位置検出装置
【課題】
小型で天候に左右されずにレールとの継目が高い精度で検出できる軌道検測車のレール継目検出器およびレール継目位置検出装置を提供することにある。
【解決手段】
この発明は、レールの頭部の上部に対応して軌道検測車等の車輌に設けられ隣接して配置され相互に逆方向に巻かれた第1、第2の空芯コイルと、第1、第2の空芯コイルにバイアス電流を流してこれら空芯コイルのインダクタンスの変化に対応する第1、第2の検出信号を得る検出回路とを備えていて、第1の検出信号と第2の検出信号のレベルの差に基づいてレール継目の検出信号を得るものである。
(もっと読む)
スロットル制御方法及び装置
乗物のエンジン用電子式燃料制御システムに信号を伝達するためのスロットル制御装置は、電磁場発生器と、電磁場と近接して位置決めされた第1及び第2の電磁場センサとを含む。電磁場及び第1及び第2のセンサは互いに対して操作され、センサは、相対的な操作に対して応答する。センサは、前記相対的な操作を表す信号を独立して伝達するように形成されている。 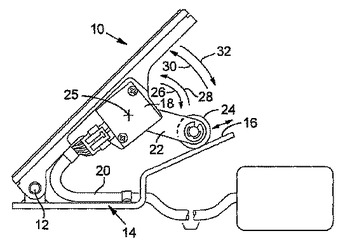 (もっと読む)
(もっと読む)
多周波位相解析を使用する検査方法及び検査システム
【課題】検査対象部品の内部の表面下検出を改善する表面下渦電流多周波検査技術を提供する。
【解決手段】部品検査方法は、検査対象部品に対して複数の多周波応答信号を発生させるために、プローブに複数の多周波励起信号を印加する。また、部品の表面下を検査するために、多周波応答信号に対して多周波位相解析を実行することを更に含む。検査システムは、部品内部に渦電流を誘導するように構成された渦電流(EC)プローブを含む。システムは、ECプローブに結合され、複数の多周波応答信号を発生するためにECプローブに多周波励起信号を印加するように構成された渦電流計器を更に含む。システムは、部品の表面下を検査するために、多周波位相解析を実行することによりEC計器からの多周波応答信号を解析するように構成されたプロセッサを更に含む。
(もっと読む)
静電容量センサ付きハンドル
【課題】 センサ本体3の仕様を変えないで感度調整が容易に可能となり、しかも、検出感度の位置による違いを低減し、所要のバランスに調整することが可能な静電容量センサ付きハンドルを提供する。
【解決手段】 ハンドル本体2を構成するハンドル構成部材のうち、センサ本体3の検出面側に位置する部分(ハンドルカバー5)を、導電体によって形成し、この導電体の一部が検出電極3aに重なって対向するように配置して、この導電体により静電容量センサの検出範囲を拡大した構成とするとともに、この導電体に、静電容量センサの検出感度調整用のトリミングを施した(切欠き8を設けた)構成とする。
(もっと読む)
アクチュエータにおける2極磁石によるホイール・インクリメント位置の検知
インクリメント・センサ・アセンブリに、アウトプット・シャフトに取り付けられた2極磁石と、アウトプット・シャフトに対して平行に配置されたホール効果センサが含まれている。アウトプット・シャフトが回転すると、第1のホール効果センサが磁石の回転位置を検知し、それとアウトプット・シャフトの回転位置を相関させる。第1のホール効果センサに隣接して、第2のホール効果センサが配置されており、アウトプット・シャフトの回転方向を確認するために利用される。  (もっと読む)
(もっと読む)
静電容量センサ及び静電容量センサ付きフラップ型ハンドル
【課題】 センサ本体3の仕様を変えないで感度調整が容易に可能となり、しかも、検出感度の位置による違いを低減し、所要のバランスに調整することが可能な静電容量センサを備えたフラップ型ハンドルを提供する。
【解決手段】 センサ本体3をハンドル基部11に取付け、センサ本体3の検出面をハンドルフラップ12内面側の所定の検出範囲に向けるとともに、前記検出範囲を覆うようにハンドルフラップ12の内面に導電面14を設け、さらにこの導電面14と前記検出電極を少なくともハンドルフラップ非動作時に電磁的に結合させる接続用導電体13を設け、この接続用導電体13又は/及び前記導電面14に、検出感度調整用のトリミングを施した(切欠き等を設けた)構成とする。
(もっと読む)
レゾルバと車両用操舵装置
【課題】 レゾルバの検出精度を高める。
【解決手段】 ステアリングモータ60の回転角度を検出するレゾルバ62において、複数の一般プレート72を積層してなる略円筒状のレゾルバステータ70の軸方向端部エンドプレート71を一体に設け、このエンドプレート71のフランジ部71cに、レゾルバステータ70を固定するための取付用孔を設けた。
(もっと読む)
ディスクの外径計測方法、及びディスクの外径計測装置
【課題】 ディスク外径を高精度かつ廉価に計測することができる新規な方法及び装置を提供する。
【解決手段】 外径公知の参照ディスク11と外径未知の計測ディスク12とを準備し、参照ディスク11の外周部と静電容量センサとで形成される基準空間の静電容量Cr及び計測ディスク12の外周部と静電容量センサとで形成される計測空間の静電容量Cmを比較し、それらの相対的な大きさ及び参照ディスク11の外径Drに基づき、計測ディスク12の外径Dmを計測する。
(もっと読む)
検査装置及び検査方法
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
位置検出装置および磁気センサ出力信号検出方法
【課題】 磁気センサの出力と比較する基準値(しきい値)を容易な方法でかつ正確な値に設定することができる位置検出装置および磁気センサ出力信号検出方法を提供すること。
【解決手段】 磁気テープ8は、ピッチλにて繰り返し着磁がなされており、磁気センサ7は、磁気テープ8に対し相対的に移動可能であり、移動に伴い繰り返しなされている着磁に応じて繰り返し変化する信号を出力する。比較器32、34は、磁気センサ7の出力信号を入力し、基準値Refと比較して比較結果をパルス信号として出力する。コントローラ35は、比較器32、34からのパル信号をカウントし磁気センサ7と磁気テープ8の相対的な移動量を演算し、演算された相対的な移動量に基づきレンズ4の位置を検出する。このとき、基準値Refは、磁気センサ7が非着磁部22aにおいて出力する出力値を取得して設定する。
(もっと読む)
静電容量型センサとその製造方法
本発明は、センサ導体とその背後に大きな保護導体を備える静電容量型センサを提供し、特に、センサ上の水の経路を表わす鉛直の細長片において前記センサ導体を形成する導電性材料の面積を最小にすることで遠方の物体に対する感度を向上する。このため、前記センサ上を流れる雨などによる水滴に対する感度が低減される。 (もっと読む)
磁気マーキングによって包装材料の位置を検出する位置検出器および方法
包装材料(314、514、714)の位置を磁気マーキング(312、512、712)によって検出する位置検出器装置(100、200、900)において、位置検出器装置は、それぞれが出力信号を出す出力部を有する複数の磁気センサを含むセンサ・アセンブリを含み、磁気センサは、少なくとも2組のペア(208、209、301、302、501、502、701、702)として配置され、各ペア磁気センサは、それぞれ感度方向(308、309、310、311、508、509、510、511、708、709、710、711、808、809、811)が反対向きに配置され、更に、センサは、包装材料の磁気マーキングを感知するように配置され、センサの出力信号を合計して合計信号とするように設けられた結合器(210、211、212、910、912、914、1100、1203、1301、1302、1303)を含む磁気センサの出力部に結合された信号処理アセンブリ(104)を含み、包装材料の位置を合計信号から判定するように配置された検出機を含む。更に、包装材料を磁気マーキングによって検出する方法が開示される。  (もっと読む)
(もっと読む)
901 - 920 / 1,066
[ Back to top ]