
Fターム[2F063DA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定対象物を非接触で測定するもの (1,066)
Fターム[2F063DA01]に分類される特許
981 - 1,000 / 1,066
顎位置測定装置、センサユニット、及び顎位置測定方法

【課題】測定精度の高い顎位置測定装置、及びこれに用いるセンサユニット、並びに顎位置測定方法を提供すること。
【解決手段】上顎と下顎との相対位置を測定するための顎位置測定装置1。顎位置測定装置1は、下顎に固定されるマーカー磁石2と、上顎に固定されると共にマーカー磁石2に対向して配置される複数の磁気センサ31からなるセンサユニット3と、上顎と下顎との相対位置を算出する演算部と、演算結果を表示する表示部とを有する。センサユニット3は、複数の磁気センサ31を顎開閉方向に配列させてなる。各磁気センサ31は、配列方向の磁気成分を検知する。マーカー磁石2の着磁軸と磁気センサ31の配列方向とが直交する。演算部は、マーカー磁石2の着磁軸を挟む2つの磁気センサ31を選び出し、これらのセンサ出力を基に、上顎と下顎との相対位置を算出する。
(もっと読む)
検針装置

【課題】異物の検出を行なう場合に、中空部内に存在する金属片の位置によって、検出感度に差異が生じることを防止するとともに、中空部外の外乱ノイズの影響を受けないように耐ノイズ性の向上を図った検針装置を提供すること。
【解決手段】被検査物を検査部1の中央に有する中空部2を通過させるように構成された検針装置100である。検査部1に配設してなる第1のコイル体10と、中空部2を挟んで第1のコイル体10と反対側に配設される直流磁界発生部20と、直流磁界発生部20に配設してなる第2のコイル体30と、を備えている。
(もっと読む)
構造物の変位測定装置
【課題】 近接工事による構造物の変位を測定する装置において、基準線の揺れによる影響を無視できるようにした安価な構造物の変位測定装置を提供する。
【解決手段】 構造物7が工事の影響を受ける範囲を挟んだ外側に設定された固定点の間に張架する線材2と、工事の影響を受ける範囲内の変位測定点に対応する線材に取り付けた測定対象体3と、測定対象体3と構造物7の位置の変化を測定する構造物7に固定した変位計測センサ4a、4bと、前記測定対象体3の揺れを減衰させる減衰装置5とを備えた。
(もっと読む)
位置検出装置
【課題】 位置検出精度が高く、構造簡単で、低コストな位置検出装置を提供する。
【解決手段】 クラッチ装置と、このクラッチ装置の締結及び締結解除操作を行う電磁式アクチュエータとを備え、この電磁式アクチュエータの磁気的操作力で移動する可動部材の位置を検出する位置検出装置であって、前記電磁式アクチュエータのコイル5に対する通電時の電流変化を検出することにより前記可動部材の動作状態を判断し、前記クラッチ装置の締結及び締結解除状態を判断する制御手段(デフロックECU13)を有する。
(もっと読む)
近接センサを使用した耐放射線回転検出装置による高精度位置検出制御方法及びこの方法に使用する装置
【課題】
構造が簡単な近接センサを使用した耐放射線回転検出器を使用し、ステッピングモータのパルス制御を監視することにより、高放射線環境下においても当該ステッピングモータによる直線移動対象物体の高精度の直線位置の検出、制御を可能にした。
【解決手段】
ステッピングモータ1の回転運動を直線運動に変換する直線移動機構2を介して移動対象物体5を直線移動させる装置において、上記ステッピングモータ1の回転軸1aに接続された同期回転軸7を軸支した回転検出装置6を設け、この同期回転軸7に羽根車8を設け、この羽根車8の羽根8bの一つにそれぞれ対向する位置に第1近接センサPX−A及び第2近接センサPX−Bを固定し、これらの第1近接センサPX−Aと第2近接センサPX−Bとは、一方のセンサが上記羽根の一つに完全に対向したとき他方のセンサは上記羽根の他の一つに半分対向する位置になるように設けた。
(もっと読む)
ブリッジ回路を有するセンサの故障判定装置およびその故障判定方法
【課題】簡単な構成で、ブリッジ回路を有するセンサの動作中における故障判定を行う。
【解決手段】OPアンプ30および32は、磁気センサ14の第1のブリッジ回路の対向する2つの出力端子の電圧を定電圧に対してそれぞれ非飽和増幅し、出力し、OPアンプ34および36は、磁気センサ14の第2のブリッジ回路の対向する2つの出力端子の電圧を定電圧に対してそれぞれ非飽和増幅し、出力する。これらのOPアンプは、磁気センサ14の入力電源電圧および接地電圧が入力されると出力が飽和出力電圧となるように、その増幅率および出力基準電圧が、それぞれ設定される。故障判定部20は、これらの出力電圧が、飽和出力電圧である場合、ブリッジ回路の対向する2つの出力端子に対応するOPアンプの出力電圧の平均が所定の電圧でない場合に、磁気センサ14が故障であると判定する。
(もっと読む)
静電容量型検出装置
【課題】容器や流通配管の内面に薄く層状に残留付している汚れの有無を精度良く検出することができ、信頼性が高く且つ小型の静電容量型検出装置を提供する。
【解決手段】 非導電性の隔壁27に汚れとして付着した誘電体層28に対して当該隔壁28を隔てて取り付けられた検出電極3に抵抗17を介して矩形波電圧を印加し、抵抗17と誘電体層28とを経由して対地間で高周波電流が流れる際の対地間で生じる静電容量とによって形成されるRC回路による検出電極3での立ち上がり立ち下がりの時間遅れに基づいて検出信号を出力するものであって、検出電極3に印加される矩形波電圧を同周波数の矩形波電圧を発生するガード電圧発生手段30と、検出電極3の周囲に配設された第二電極4と、検出電極3の背面側をカバーするように配設された第三電極5とを備え、第二電極4及び第三電極5の両方が共に接地されている。
(もっと読む)
センサシステムおよびその動作方法
【課題】互いに変位する2物体間の隙間を変位の全範囲にわたって正確に測定するセンサシステムを提供すること。
【解決手段】感知されたパラメータを表す出力信号を供給するように動作可能なセンサ(12)を備えるセンサシステム(10)が提供される。センサシステム(10)は、また、センサ(12)に結合された制御システム(20)を備え、この制御システム(20)は、感知されたパラメータを表す出力信号に基づいてセンサ(12)の物理特性を変えるように動作可能である。
(もっと読む)
回転角センサ
【課題】 従来よりも小型の回転角センサを提供すること。
【解決手段】 基板7の表面側に設けられ、ステアリングシャフトに連動して回転する検出用ギア5、6と、基板7の表面に設けられた開口部8、9と、開口部8、9に設けられ、検出用ギア5、6の絶対角度を検出する磁気センサ10、11と、磁気センサ10、11による検出結果に基づいて、ステアリングシャフトの絶対角度を算出する演算装置と、を回転角センサ1に備えさせた。
(もっと読む)
回転飛翔体の回転角計測制御方法及び回転飛翔体
【課題】本発明は、回転飛翔する飛翔体内のコイルから地磁気を界磁として発生する電圧波形を用いて基準方位信号を得ることを目的とする。
【解決手段】本発明による回転飛翔体の回転角計測制御方法は、コイル(c)を設けた飛翔体(1)を発射し、中心軸を回転中心として回転する飛翔体(1)内のコイル(c)から地磁気(B)を界磁として発生する電圧波形(V)から飛翔体(1)の空間における回転角度である基準方位信号を得る方法である。
(もっと読む)
アライメント装置、アライメント方法、及びリソグラフィ装置
【課題】2つのデバイスを互いに対してアライメントする装置及び方法を提供すること。
【解決手段】これらのデバイスのうちの第1デバイスに近接スイッチが設けられ、これらの2つのデバイスのうちの第2デバイスに基準マークを設けることができる。この近接スイッチの検知領域に他のデバイスが入ると、近接スイッチの第1の状態が第2の状態に変わる。即ち、第1状態から第2状態までの移行は、近接スイッチに対する第2デバイスの相対位置の尺度である。近接スイッチに対する第2デバイスの相対位置が分かれば、これらのデバイスは互いに対して所望の相対位置に位置することができる。この近接スイッチを用いて他のデバイスの位置をいくつかの方向で決定することができる。第1デバイスの第2デバイスに対する相対位置及び方向の両方、即ち、回転を、近接スイッチを用いて決定することができる。
(もっと読む)
移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】 より高精度に移動体の位置等を推定検出することができる方法及び装置を提供する。
【解決手段】 電界を直交3軸方向の各成分で検知する電界検知器1と、電界検知器1が検知した信号を電界のデータとして時系列に記録するデータ収集器5と、電界のデータの値が点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定したパラメータの値に基づいて移動体の現在、将来の位置等の推定検出をする位置等推定検出器6とを備えた。
(もっと読む)
傾き検知方法および傾き検知装置、この方法および装置に用いる金型、この方法および装置を用いたパターン形成装置
【課題】 精度の高い傾き検知方法および傾き検知装置、この方法および装置に用いる金型、この方法および装置を用いた傾き調整方法を提供すること。
【解決手段】 加工対象物200の加工面200aと、加工面200aに所定のパターンを形成する金型100のパターン面100aとの相対的な傾きを検知する傾き検知方法であって、総てが同一直線状に並ばないパターン面上の3以上の点と対向する静電容量型変位計80を加工面200aを基準とする所定位置にそれぞれ配置し、金型100と各静電容量型変位計80とを近接させ、各静電容量型変位計によって金型との距離を測定し、加工面に対するパターン面の傾きを検知する。
(もっと読む)
渦電流を使用した薄膜基板信号分離のためのシステム、方法、および装置
基板に起因する渦電流センサ(ECS)信号の成分を決定するシステムおよび方法は、ECSに対して、ECSから第一の距離にある第一の位置に基板を設置するステップを含む。基板は、基板の第一の表面上に導電膜を含むことができる。第一のECS信号は、基板が第一の位置にある状態で検出できる。基板は、次に、ECSに対して、ECSから第二の距離にある第二の位置に基板が存在するように、ECSに対して反転させることができる。第二の距離は、ほぼ基板の厚さを除いた第一の距離に等しい。第二のECS信号は、基板が第二の位置にある状態で検出される。差分信号が決定される。差分信号は、ECSの較正グラフ上の第一の信号レベルと第二の信号レベルとの間の差に等しい。第二の信号レベルは、基板の厚さにほぼ等しい距離だけシフトされている。第一のECS信号の第一の基板成分を計算する。第一のECS信号の第一の基板成分は、第一の距離と差分信号との積を、基板の厚さで除算したものに等しい。 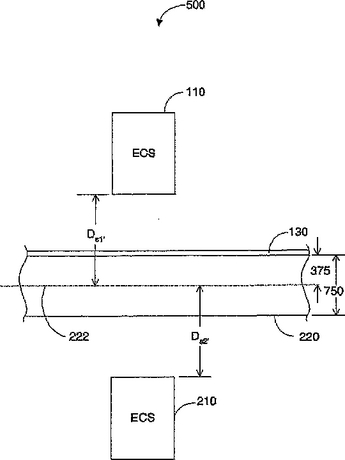 (もっと読む)
(もっと読む)
相補的なセンサを用いた測定処理制御のための方法および装置
【解決手段】 ウエハの層の厚さを検出するための方法が提供されている。その方法は、処理されるウエハを保持するよう構成されたウエハキャリアの特定の半径の規定を備える。その方法は、さらに、1組の相補的なセンサを形成するよう構成された複数のセンサの準備を備える。さらに、その方法は、複数のセンサの内の各センサと、隣接するセンサとの位相が、同じ角度だけずれるように、ウエハキャリア内の特定の半径に沿う複数のセンサの配置を備える。その方法は、さらに、複数のセンサによって生成された信号の測定を備える。さらに、合成信号を生成するために、複数のセンサによって生成された信号の平均化が備えられている。平均化は、合成信号が、層の厚さを特定するよう相関を有することができるように、合成信号からノイズを除去するよう構成されている。  (もっと読む)
(もっと読む)
操舵角を求める方法
この発明は、サーボモーターによって制御されるオーバーライディング伝動部を備えた操舵システムでの操舵角を求める方法であって、この伝動部の出力側では、伝動部の入力側で設定されたハンドル角とサーボモーターを用いて調整された追加操舵角とを組み合わせた、ステアリングシャフトの伝動部の出力側の部分に対する合計操舵角を調整することが可能であり、サーボモーターは、操舵システムの停止状態ではロックされており、ハンドル角は、伝動部の入力側に配置されたハンドル角変換器により検出される方法に関する。この発明による方法は、伝動部の出力側のステアリングシャフト上に配置された増分測定式操舵角変換器(132)を用いて、初期値を出発点として合計操舵角(δT )を検出し、この初期値は、操舵システムの作動時に、その前に行われた操舵システムの停止とほぼ同時に検出、保存していたハンドル角(δH,0 )及び合計操舵角(δT,0 )の値と、操舵システムの作動とほぼ同時にハンドル角変換器(130)を用いて検出したハンドル角(δH )の値とから求めることを特徴とする。  (もっと読む)
(もっと読む)
静電容量型距離センサ
【課題】被検出物までの距離が長い場合も検出精度が十分に高い静電容量型距離センサを提供する。
【解決手段】センサ部101は、送信電極101aと、送信電極101aの裏面側から放射される電磁波を遮蔽するシールド電極101bと、送信電極101aとシールド電極101bとの間に流れる電流を遮断するためにの補助電極101cとを有する。バッファ回路103が出力する交流電圧は、抵抗素子104を介して送信電極101aに供給され、且つ、抵抗素子104を介さずに補助電極101cに供給される。抵抗素子104は、送信電極101aから流出する検出電流の値を、端子間電圧として検出する。本発明によれば、異なる配線を介してバッファ回路から送信電極および補助電極に交流電圧を供給し、送信電極を流れる電流のみを電流検出抵抗素子で検出するので、被検出物の検出精度を向上させることができる。
(もっと読む)
壁厚の監視
送信器手段と受信器手段とを含むパルス渦電流プローブを用いた導電性の壁をもった物体の壁厚の監視方法であって、前記壁上の検査場所を選択するステップ、複数の検査時間θm(m=1,...,M;M≧2)にて、検査場所に対して所定の位置にプローブを配置し、送信器手段を作動させることにより前記物体中に過渡的な渦電流を誘導し、受信器手段により信号Vmを記録するステップ、及び信号Vmの各々から検査時間θmに関係する壁厚dmを求めるステップであって、検査時間θmにおける前記検査場所での物体の温度を考慮に入れる前記ステップ、を含む監視方法。 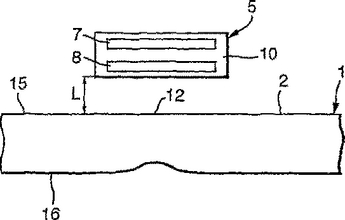 (もっと読む)
(もっと読む)
XYステージ
【課題】 スライダ部のピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 X軸モータ及びY軸モータによりスライダ部を2次元方向に位置制御するXYステージにおいて、
前記スライダ部のX方向ピッチング角を検出する第1のZ軸センサと、
前記スライダ部のY方向ローリング角を検出する第2のZ軸センサと、
前記第1及び第2のZ軸センサの測定値に基づき、前記X軸モータ又はY軸モータの少なくともいずれかの励磁電流にこれと位相が直交する電流を重畳させる直交電流生成手段と、
を備える。
(もっと読む)
磁気位置センサ
ここで開示される構成は、少なくともほぼ直線運動座標上のボディーの位置を決定する装置であり、この直線運動座標に沿って2組の磁石装置が配置され、各磁石装置はN極及びS極からなる少なくとも一対の磁極を備え、さらに、2組の磁石装置の間に磁気抵抗角度センサ装置が配置され、この磁気抵抗角度センサ装置は磁界の方向を測定するように配置され、この磁界は、測定面に位置する空間基準方向との関係で、磁石装置間にわたっており且つ測定平面においてそれらの間で延びている。運動座標は磁気抵抗角度センサ装置の測定面に対して少なくともほぼ直角に整列し、2組の磁石装置の磁気軸は測定面にほぼ平行に延び、測定面上への磁気軸の射影が互いに相対的に所定の角度だけずらされるように整列される。少なくとも第1磁石装置はボディーに結合され且つ移動可能に配置され、その移動は、ボディーと共に且つ運動座標に沿って磁気抵抗角度センサ装置に対して行われる。その結果、少なくともほぼ直線運動をする場合に、角度センサを用いてボディーの位置を決定する装置が、作り出される。  (もっと読む)
(もっと読む)
981 - 1,000 / 1,066
[ Back to top ]