
Fターム[2F063LA25]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 除算 (64)
Fターム[2F063LA25]に分類される特許
41 - 60 / 64
角度検出装置

【課題】省スペースで、操舵アシスト装置の電子制御ユニットにかかる演算負荷を低減でき、安全性の高い角度検出装置を提供する。
【解決手段】ステアリング軸10の回転角をレゾルバロータ14及びレゾルバステータ15からなるレゾルバで検出する。レゾルバロータ14は、減速機構を介して、ステアリング軸10の回転角を検出する。そして、減速機構の減速動作と非減速動作とを切り換えることで、レゾルバが検出する回転角を相対角と絶対角との間で切り換える。
(もっと読む)
被駆動体の位置検出装置

【課題】被駆動体の位置を検出するための専用のデバイスを追加することなく、被駆動体の位置を検出することができる被駆動体の位置検出装置を提供する。
【解決手段】被駆動体8と、コイル11b,12bが巻かれた電磁石11,12と、被駆動体に一体に設けられ、電磁石と対向するアーマチュア13と、コイル11b,12bに駆動電流IACを供給することにより、アーマチュア13を作動させ、被駆動体を駆動する駆動回路16と、を有する駆動装置において、被駆動体の位置を検出する被駆動体の位置検出装置であって、コイル11bの電圧を検出する電圧検出手段21と、駆動電流IACを検出する駆動電流検出手段22と、検出された検出電圧SVおよび検出電流SIに基づいて、被駆動体の位置を検出する位置検出手段30,40,50と、を備える。
(もっと読む)
位置計測システム
【課題】演算誤差を低減し高精度かつ高速に計測することのできる位置計測システムを提供する。
【解決手段】可動鉄片、該可動鉄片を励振する励振巻線L0および出力巻線L1を有する可動鉄片変圧器001と、前記可動鉄片変圧器の励振巻線を励振する励振信号を生成する発振器002、前記励振信号をA/D変換するA/D変換器003、A/D変換器出力をフーリエ変換するフーリエ変換部005、フーリエ変換された励振信号の振幅を算出する振幅値算出部007、前記出力巻線に発生する出力信号をA/D変換するA/D変換器004、A/D変換器出力をフーリエ変換するフーリエ変換部006、フーリエ変換された出力信号の振幅を算出する振幅値算出部008、フーリエ変換された励振信号の振幅を算出する振幅値算出部出力とフーリエ変換された出力信号の振幅を算出する振幅値算出部の比を演算する除算部009、および該除算部出力にしたがって前記可動鉄片の位置を演算する位置演算部010を有する計測装置500を備えた。
(もっと読む)
車輪用転がり軸受装置
【課題】温度ドリフトの発生を防止して、センサの信頼性をさらに高めることができる車輪用転がり軸受装置を提供する。
【解決手段】車体側に固定される筒状の固定軌道輪1と、この固定軌道輪1の内部に回転自在に挿通される回転軌道輪2、3と、これらの軌道輪の間に転動自在に配設される複列の転動体5とを備えた車輪用転がり軸受装置H。前記回転軌道輪2、3の車両インナ側端部の外周面とのギャップを検出する複数の変位センサ24を周方向に有する円環状のセンサハウジング16の車両アウタ側端部が、前記固定軌道輪1の車両インナ側端部内周面に圧入されており、且つ前記変位センサ24が合成樹脂又はゴム系材料で被覆されて前記センサハウジング16と一体化されている。
(もっと読む)
位置検出装置、位置検出装置を有する光学系と撮像装置
【課題】従来と同等の高精度の位置検出機能を維持しつつ、従来よりも磁束検出手段と磁石の間の距離を縮めることが可能で、小型化、薄型化に適した位置検出装置を提供する事にある。
【解決手段】磁束の変化に対応して位置の変化を検出する磁石と複数の磁束検出手段よりなる位置検出装置において、磁石は磁束検出手段の少なくとも二つを結ぶ線を磁石の磁壁面上に含み、磁石の移動方向は磁壁面上にあるようにする。
(もっと読む)
位置検出システム、位置検出システムを用いた光学系と撮像装置
【課題】複数の磁気式の位置検出装置を近接して配置しても、磁場の位置検出精度への相互干渉を抑えることができ、高精度かつ小型である位置検出システムを提供する事にある。
【解決手段】各位置検出装置の磁石の着磁方向ベクトルが同一平面上になく、かつ着磁方向ベクトルが直交化方向成分を有する様に磁石を配置し、動く磁石の着磁方向ベクトルの移動方向が他方の磁石の着磁方向ベクトルの対称面に含まれる様にする。同時に磁気センサが他方の着磁方向ベクトルの直交成分を検出できるようにする事が好ましい。
(もっと読む)
回転センサ付き車輪用軸受装置
【課題】回転速度や回転方向の検出が可能で様々な車両制御用途に使用可能な高分解能の回転信号を得ることができ、回転検出のためのサイズも小さく抑えることができる回転センサ付き車輪用軸受装置を提供する。
【解決手段】外方部材1と内方部材2の転走面6,7間に複列の転動体5が介在し、車体に対して車輪を回転自在に支持する。外方部材1または内方部材2のいずれか一方の部材の軸受軸心Oには、この軸受軸心回りの方向性を有する磁界発生手段21を設け、他方の部材には、磁界発生手段21の磁界を感知するセンサ22を軸方向に対向して設ける。前記センサ22は、磁気センサ素子をアレイ状に並べた磁気センサアレイ、または2次元ベクトルセンサと、その信号読出回路および角度計算手段を半導体チップに集積したセンサICからなる。
(もっと読む)
舵角センサ
【課題】 より高精度の舵角センサを提供する。
【解決手段】 ステアリングシャフト103に取り付け、当該ステアリングシャフトの絶対角度を測定するための舵角センサ1であって、当該ステアリングシャフトと連動して可逆回転する主動ギア7と、主動ギアと連動して回転する微信号用ギア19の回転角度を検出する第1検出手段と、主動ギアと連動して回転する粗信号用ギア45gの回転角度を検出する第2検出手段と、を備え、当該第1検出手段は、検出した当該微信号用ギアの回転角度を示す微信号を出力するホール素子及び磁石を含めて構成してあり、当該第2検出手段は、検出した当該粗信号用ギアの回転角度を示す粗信号を出力するポテンショメータを含めて構成してある。そのため、なるべく少ない部品点数で、隣接する検出手段相互の磁束の影響を受けない、より高精度の舵角センサを提供することができる。
(もっと読む)
回転角度検出装置
【課題】設計の自由度が高い回転角度検出装置を提供すること。
【解決手段】被検出回転体の回転角度を検出する回転角度検出装置であって、前記被検出回転体に取り付け該被検出回転体と共に回転する主回転体と、前記主回転体に対して所定の回転比で回転する副回転体と、前記主回転体の回転に対応して周期的に変化する信号を出力する主回転検出機構と、前記副回転体の回転に対応して周期的に変化する信号を出力する副回転検出機構と、前記主回転検出機構および前記副回転検出機構が出力する信号の周期を変換し該信号を用いて該変換した周期における前記主回転体および前記副回転体の回転角度を算出する信号処理手段と、前記算出した主回転体または副回転体の回転角度と、前記主回転体と前記副回転体との相対回転角度と、前記変換した周期とに基づいて前記被検出回転体の回転角度を算出する演算処理手段と、を備える。
(もっと読む)
容量センサー内蔵の自動車シートに着座した乗員の形態を決定する方法
【課題】いくつかの容量センサーを内蔵した自動車シートに着座した乗員の形態をより詳細に決定することができるように、容量センサーの前記構造を改良することにある。
【解決手段】シートに内蔵された複数の容量センサーからの出力を収集する工程と、各容量センサーに対して、前記センサーから標的物が離れている距離を示す第1の値、及び、前記標的物によって覆われた前記センサーの表面を示す第2の値を決定する工程と、前記標的物によって覆われた前記センサーの表面を示す前記第2の値に、前記センサーから前記標的物が離れている距離を示しかつ前記第2の値に対応する前記第1の値に基づいた各重み付けを、適用する工程と、重み付けされた第2の値の収集に基づいて前記標的物の形態を決定する工程とを含む。
(もっと読む)
回転角検出装置
【課題】360度超の回転角を検出可能な回転角検出装置の温度変化や経年変化を簡素な構成により高精度に実現可能な回転角検出装置を提供すること。
【解決手段】360度を超える入力角度範囲で単調増加する第一の演算値θ1と、360度の入力角度範囲で複数回の複数周期波形の第二の演算値θ2とに基づいて第一の演算値θ1の理想値θ1rを算出し、この第一の演算値θ1の理想値θ1rと第一の演算値θ1とに基づいて理想値θ1rと演算値θ1との間のずれ量に関する関数値を算出し、前記ずれ量の関数値に基づいて第一の演算値θ1を補正して補正済み第一の演算値θ1’を求め、求めた補正済み第一の演算値θ1’と第二の演算値θ2とに基づいて出力角度θoを算出する。
(もっと読む)
回転角度検出装置
【課題】電源をオンしてから、電源オフ時に発生した異常を検出するための回転体の最大回転角度を小さくすることのできる回転角度検出装置を提供すること。
【解決手段】マイクロコンピュータは、ステアリングシャフトと一体回転する主動歯車に噛合する第1及び第2の従動歯車の回転角度をそれぞれ検出する第1及び第2磁気センサから出力される各アナログ信号に基づいて半径値r1,r2を算出する。そして、この半径値r1,r2の比r1/r2を算出して、この半径値の比r1/r2と予め設定された下限しきい値RL及び上限しきい値RHとを比較する相対半径チェックを行う。
(もっと読む)
数個の磁界決定手段によりヘッドライトの回転角位置を測定するための方法および装置
【課題】磁界決定手段により、ヘッドライトの回転角位置を測定する。
【解決手段】強磁性体(32)は、第1軸線に投影された局部的磁界(B)を測定する第1手段(34A)に対して枢動し、かつ電子処理ユニット(35)を備える測定デバイスにより、ヘッドライト(10)の回転角位置を測定するための方法であって、測定ステップと、第2処理ステップとを有し、第2処理ステップ中に、電子処理ユニット(35)は、ヘッドライトの回転角位置を計算し、かつ第1測定ステップ中に、第2電気測定信号(Sm2)を発生する第2測定手段(34B)により、第1測定軸線(M1)と直交する第2測定軸線(M2)に射影された局部的磁界(B)の強度を測定し、第2処理ステップ中に、前記電子処理ユニット(35)は、前記2つの測定軸線(M1、M2)によって定められた平面に射影された、第1測定軸線(M1)に対する局部的磁界(B)の角度を計算するようになっている。
本発明は、上記方法を実施するための測定装置にも関する。
(もっと読む)
回転角検出装置
【課題】簡素な機構にて360度を超える回転角検出が可能な回転角検出装置を提供すること。
【解決手段】たとえば磁石4の回転回数変化に応じて磁石4を軸方向に変位させることにより、磁気検出部7に作用する磁束密度Bのベクトル長(大きさ)を磁石4の回転回数変化に応じて単調変化させる。この磁束密度Bのベクトル長の変化量から回転回数を算出し、同時に、2方向の磁束密度Bx、Byの演算により360度以下の回転角θを算出し、両者を加算して最終的な回転角θ’を算出する。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を検出するのに際して、暗電流を必要とすることなく検出可能な回転角度の範囲を広げることが可能な回転角度検出装置を提供すること。
【解決手段】ステアリングシャフト1と一体的に回転されるとともにn個の歯を有するメインギヤ10には、m個の歯を有する第1の検知ギヤ11と、L個の歯を有する第2の検知ギヤ12とがそれぞれ噛合されている。そして、マイコンは、1周期中の第1の検知ギヤ11の回転角度αと、1周期中の第2の検知ギヤ12の回転角度βとを用いてステアリングシャフト1の回転角度θを算出する。
(もっと読む)
共通モード修正巻線及び簡素化された信号処理を有する誘導位置センサー
回転運動用誘導位置センサーは、送信コイル、及び送信コイルが交流電源により励磁される時に受信機信号を生成する受信コイルを含む。可動カプラー要素は、受信機信号がカプラー要素の位置に感応するように、送信コイル及び受信コイルとの間の誘導結合を変更する。受信機信号及び参照信号の比率は、カプラー要素の位置に感応するが、共通モード因子には実質的に感応しない。位置センサーの角度範囲又は位置範囲は、複数の受信コイルを使用して増大させることができる。 (もっと読む)
駆動装置
【課題】 移動体の位置検出ポイントが広い間隔をあけて複数存在する場合でも、移動体を高い精度で位置決めすることができる駆動装置を提供する。
【解決手段】 磁界を発生させる磁界発生部材7と、磁界を検出する第1,第2,第3の磁界検出素子6A,6B,6Cから成る磁界検出手段6と、磁界発生部材7を移動させる圧電アクチュエータPとを備える。磁界検出手段6での検出結果に基づいて磁界発生部材7と磁界検出手段6との相対的な位置決めを行う際、磁界発生部材7が移動する可動範囲において、所定領域では第1,第2の磁界検出素子6A,6Bの検出結果に基づいて第1の位置決めを行い、所定領域から離れた所定ポイントでは第3の磁界検出素子6Cの検出結果に基づいて第2の位置決めを行う。
(もっと読む)
金属検出装置
大きさが異なる金属の複数の異物サンプルをそれぞれ交番磁界中に通過させたときに検波部26から出力される信号のデータと各異物サンプルの大きさを示すデータとを予め記憶しているメモリ33を備え、設定手段32は、その異物サンプルのデータに基づいて、判定手段31によって検出可能な金属の大きさを表示器36に表示させる。また、混入金属表示手段34は、判定手段31で被検査体に金属が異物していると判定されたとき、その混入金属の大きさを表示器36に表示する。検出可能な金属の大きさや被検査体に混入している金属の大きさをユーザが直観的に把握できる。 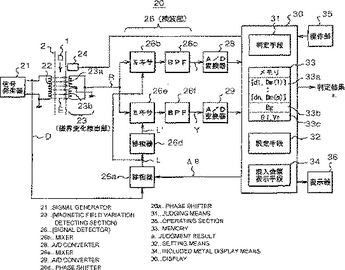 (もっと読む)
(もっと読む)
位置決め装置
【課題】簡便かつ安価な構成で、可動部材の傾きを抑えながら位置決め制御できる位置決め装置を提供する。
【解決手段】位置決め装置10は、圧電素子14、圧電素子14の一端に固定された駆動部材16、および、駆動部材16上に移動可能に摩擦保持された可動部材18からなる圧電アクチュエータ20と、圧電素子14を駆動する駆動回路21と、可動部材18の位置を検出する位置センサ25と、位置センサ25からの信号を処理する検出回路26と、検出回路26による位置検出値に基づいて駆動回路21に駆動指令信号を与えることで可動部材18の位置フィードバック制御を行う制御回路28とを備え、可動部材18の位置決め動作の際、制御回路28は、可動部材18が目標停止位置に一旦到達した後に、オーバーシュートを伴う位置決め制御を所定時間以上さらに継続する。
(もっと読む)
着座センサ
【課題】 座席シートへの着座位置(状態)に応じて異なるレベルのセンス信号を周辺機器に供給できるように改良されたフィルム状の着座センサを提供することを目的とする。
【解決手段】 本発明の着座センサによれば、複数のセンサセルA乃至Dが着座位置によっては不作動のセンサセルが発生するように分布配置され、センサ回路配線3、4、22及び複数のセンサセルA乃至Dが入出力端子部T1−T2間にセンサ回路を構成するように相互接続され、このセンサ回路に正常着座又は異常着座を含む着座位置の違いに応じて前記出力端子部T2の出力レベルが異なるように作用する複数のレベル設定素子AR、AR1、CR、CR1が接続されることによって着座位置に応じて異なるセンス信号レベルを周辺機器へ供給できるようにされている。
(もっと読む)
41 - 60 / 64
[ Back to top ]