
Fターム[2F063LA25]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 電気回路、信号処理 (1,696) | 除算 (64)
Fターム[2F063LA25]に分類される特許
21 - 40 / 64
磁界振幅擾乱体の検出方法および検出器、この検出方法による位置特定方法、および位置特定システム

【課題】 複雑な計算および予備較正を要することなく、磁界振幅擾乱体を検出する方法を提供する。
【解決手段】 この方法は、相異なる任意の2つの周波数で放射される磁界の振幅が、あらかじめ定められた比で互いに関連付けられている、周波数の異なるいくつかの磁界を、同一の1軸磁界放射源から放射するステップ(62)と、周波数の異なるこれらのいくつかの磁界の振幅を、同一のセンサによって測定するステップ(64)と、測定された振幅のうちの2つの間の比が、相異なる2つの周波数で放射された磁界の、これらの2つの振幅を関連付けている、あらかじめ定められた比のあらかじめ定められた閾値から逸脱した場合には、磁界振幅擾乱体の存在を通知し(70)、逸脱しなかった場合には、通知しないステップとを含んでいる。
(もっと読む)
ガスタービン制御装置

【課題】ガスタービン制御装置の保守性の向上を図る。
【解決手段】ガスタービン制御装置は、バルブの開度に連動する可動鉄芯と、可動鉄芯の周囲に配置される1次コイル32と、1次コイル32に対応して設けられる2つの2次コイルと、を有する差動トランスより、1次コイル32及び2つの2次コイルに対する可動鉄芯の位置が変化する場合に、電源から1次コイル32に加えられる励磁電圧の電圧値及び励磁電圧によって2つの2次コイルに生じる誘起電圧の電圧値が入力される入力部と、2つの2次コイルのそれぞれの誘起電圧から求められた誘起電圧の電圧値の差を励磁電圧の電圧値で除して、可動鉄芯の位置を示す情報を演算する位置演算部38と、演算された可動鉄芯の位置に基づいて、バルブの開度を求め、バルブの開度を指示する開度指示値を、バルブの開度を制御する開度制御部に出力する出力部と、を備える。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置
【課題】移動体が複数ある場合において、正しくキャリブレーションを行うことのできる慣性駆動アクチュエータのキャリブレーション方法及び慣性駆動アクチュエータ装置を提供する。
【解決手段】移動手段により往復移動される振動基板に対して、慣性により、複数の移動体のうちの対象となる対象移動体が、一方及び他方の移動限界位置間を移動するように駆動を行い、静電容量によって位置検出を行う慣性駆動アクチュエータのキャリブレーション方法であって、対象移動体に設けられた移動体電極と、振動基板に設けられた振動基板電極と、が対向する部分の静電容量を、一方及び他方の移動限界位置において検出し、これら一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離との比率を算出する。さらに、一方及び他方の移動限界位置の少なくとも一方は、対象移動体が対象以外の移動体に突き当たる位置である。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
静電容量センサ
【課題】物体の位置を検出できるようにする。
【解決手段】検出電極Aと検出電極Bとは、所定の距離だけ離れた位置に配置され、シールド電極SEは、検出電極Aと検出電極Bを取り囲むようにして配置され、物体Pを検出する方向に開口部を有する。除算回路13は、物体Pと検出電極Bにより形成される静電容量Cbに応じたCV変換出力を、物体Pと検出電極Aにより形成される静電容量Caに応じたCV変換出力で除算し、その除算結果から得られる物体Pとの距離に関する情報を出力することにより、物体Pの位置が検出できるようになる。本発明は、車両等の開閉体等への人体の挟み込みの検出に用いられる静電容量センサに適用できる。
(もっと読む)
乗員姿勢検知装置および乗員姿勢検知方法
【課題】安価に構成可能でコストの削減を図りつつ乗員の姿勢を検知する。
【解決手段】乗員姿勢検知装置100は、静電容量センサ部10と回路部20とを備える。静電容量センサ部10は、車室天井部2の座席40の前方および座席40の直上にそれぞれ配置された第1および第2検知電極11,12を備え、各検知電極11,12は切替スイッチSW1,SW2を介して回路部20の静電容量検知回路21とシールド駆動回路23とにそれぞれ接続されている。回路部20のCPU29は、静電容量検知回路21にて検出された各検知電極11,12からの静電容量に基づく静電容量値を用いて、座席40に着座した乗員(人体)48の頭部49の位置の情報に基づいて着座姿勢を判定する。判定した着座姿勢に関する姿勢情報は、車両1に搭載されたECUに出力され、エアバッグの展開等の制御に用いられる。
(もっと読む)
アクセレレーターポジションセンサー
【課題】別の保証コイルを具備せず、受信コイルだけで保証信号を得ることができるアクセレレーターポジションセンサーを提供する。
【解決手段】本発明によるアクセレレーターポジションセンサーは、オシレーターに繋がれて磁場を発生する送信コイルと、前記送信コイルから所定の間隔をおいて設置され前記送信コイルで発生する磁場を制御するカプラーと、前記送信コイルと前記カプラーの間に設置され前記送信コイルで発生する磁場を受信して交流周波数を発生する受信コイルと、前記受信コイルと繋がれて、前記受信コイルから得られる交流周波数を利用して前記カプラーの回転情報を演算してアクセル・ペダルの変位の値を出力する信号処理部と、を備えることを特徴とする。
(もっと読む)
位置検出装置
【課題】簡単な構造で安価に検知領域の範囲に近接等する検知対象物の位置や距離を確実に検出し、設計自由度を向上させる。
【解決手段】位置検出装置100は、静電容量センサ部10および検出回路部20を備え、静電容量センサ部10は、第1および第2検知電極11,12と、これらの間に配置された誘電体19とからなる。誘電体19は、検知面19a上に検知領域の範囲Lを形成する。検出回路部20は、静電容量検知回路21,22と、A/D変換器23,24と、演算処理回路25とを備え、各静電容量検知回路21,22は演算処理回路25の制御により周期的に同期がとられて動作する。各検知電極11,12にて検知された静電容量の検出値C1,C2に基づき、演算処理回路25によって検知領域の範囲Lにおける検知対象物の位置を判定して検出する。
(もっと読む)
位置検出装置及びその位置検出装置を用いた電子機器
【課題】構成部品を汎用品や入手が容易な部品等により構成した場合においても、簡易な構成で小型化を実現することができると共に広範囲な距離を高精度に検出することが可能な位置検出装置を提供すること。
【解決手段】感磁方向が、配置された基板に対して垂直な磁気センサ2個を1組とした磁気検出手段を備え、この磁気センサ2個の中心を結ぶ直線および基板に平行に移動可能に支持し、この基板に対して垂直にN極とS極が着磁された磁石を配置した位置検出機構において、2個の磁気センサの出力をVaおよびVbとした場合に、磁石と2個の磁気センサの位置関係により、(Va−Vb)、(Va+Vb)、(Va−Vb)/(Va+Vb)を用いて位置検出を行う。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、ロータ21の回転に伴い軸線n1の周りを回転する2つの磁石22a,22bを備え、磁石22a,22bが回転するときに磁石22a,22bから発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22a,22bを軸線n2の方向に並設するとともに軸線n3の方向に延伸された形状とし、且つ、軸線n2に沿って異極同士が向かい合う態様にてそれぞれ着磁する。また、磁気センサ23を、2つの磁石22a,22bに挟まれる領域から軸線n1の方向にギャップgだけずれた位置に配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、磁気センサ23と、ロータ21の回転に伴い軸線n1の周りを回転する磁石22とを備え、磁石22が回転するときに磁石22から発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22を、軸線n1に平行な軸線n2を中心軸とする円柱状に形成するとともに軸線n2の方向に着磁する。また、磁気センサ23を、磁石22の中心Csの描く回転軌跡を含む円周上から軸線n1の方向にギャップgだけオフセットした位置に配置し、さらに、その検出面を、磁石22の中心Csの回転平面と平行となる態様にて配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
位置測定装置
【課題】 位置測定装置を構成する送信系コイルと受信系コイルのうち、送信系コイルを小さくする。
【解決手段】 位置測定装置は、第一の地点に配置された一軸の励磁コイル14と、該励磁コイルに交流信号を供給して励磁するための信号発生回路と、中心軸が互いに直交するようにして第二の地点に配置された第一、第二、第三の検出コイル21−1、21−2、21−3と、前記第一、第二、第三の検出コイルの出力から電圧信号を得る回路とを含む。前記励磁コイルを励磁した時に前記第一、第二、第三の検出コイルに誘起される誘起電圧を用いて予め定められた演算を行うことにより、前記検出コイルの座標系に対し前記励磁コイルの中心軸方向が既知であるとき前記第二の地点から前記第一の地点までの方位と距離を算出する。
(もっと読む)
容量的に間隔を検出するためのセンサ装置
本発明は、車両にあるセンサ装置と対象物との間の間隔を容量的に検出するためのセンサ装置に関するものであり、このセンサ装置は対象物と容量的配置を形成するための電極と、この容量的配置のキャパシタンスに比例する信号を生成する装置とを有する。このセンサ装置は、対象物(2)と容量的基準配置(9)を形成するための基準電極(7)と、この容量的基準配置(9)のキャパシタンス(C2)に比例する基準信号(IR)を生成するための別の装置(13)と、信号(I)と基準信号(IR)との比を形成することにより間隔(d)を求めるための評価装置とをさらに有し、前記基準電極(7)の電極形状は電極(5)の電極形状とは異なることが提案される。 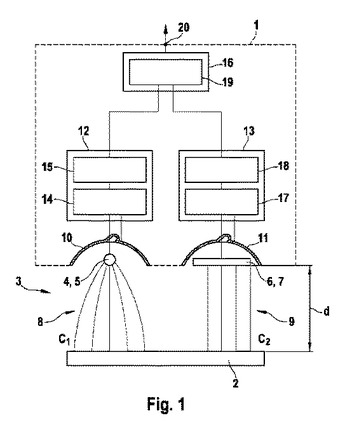 (もっと読む)
(もっと読む)
誘導式位置センサ
位置センサは、外側ループ部分および内側ループ部分の双方を有するトランスミッタコイルを有する。レシーバコイルがトランスミッタコイルのごく近傍に配置されており、レシーバコイルは、第1のループと、反対方向に巻かれた第2のループとを含む。レシーバコイルは、トランスミッタコイルとレシーバコイルとの誘導結合によってトランスミッタコイルが励起されると、電気出力信号を生成する。可動のカプラー素子は、トランスミッタコイルとレシーバコイルのループとの誘導結合を、カプラー素子の位置の関数として変化させる。 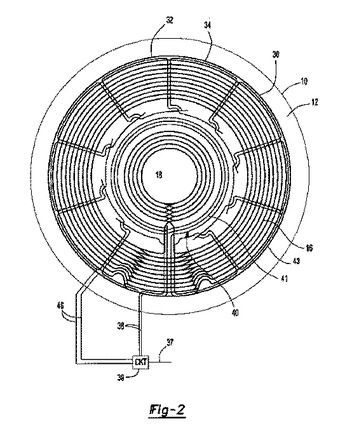 (もっと読む)
(もっと読む)
磁気記録媒体の保護膜厚測定方法および磁気記録媒体評価装置
【課題】磁気記録層上に保護膜を有する磁気記録媒体について、光学的測定を行うことなく電磁変換特性検査工程の中で保護膜厚検査も同時に行うことが可能となる方法を提供する。
【解決手段】本発明に係る磁気記録媒体の保護膜厚測定方法は、被測定媒体と保護膜厚が測定済みの参照用媒体のそれぞれについて、波数k1の正弦波信号を書き込み、再生信号振幅A1を測定し、次いで、前記波数k1と異なる波数k2の正弦波信号を書き込み、再生信号振幅A2を測定した後、それぞれの媒体について読み出し距離d1、d0を算出し、前記被測定媒体の読み出し距離d1と前記参照用媒体の読み出し距離d0との差から被測定媒体の保護膜厚を算出することを特徴とする。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 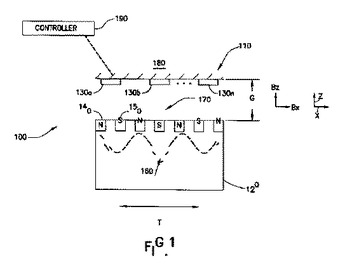 (もっと読む)
(もっと読む)
回転角検出装置、及び電動パワーステアリング装置
【課題】サンプルホールド回路を廃止し、モータ制御とA/D変換が重ならないようにsin/cos波形を取得してモータの回転角θを検索する回転角検出装置を提供する。
【解決手段】 レゾルバ41に正弦波励磁電圧を入力するとEsin電圧及びEcos電圧が出力される。Esin電圧及びEcos電圧は、A/D変換器59へ直接入力される。A/D変換器59は、第2のタイマ68のタイミングでEsin電圧及びEcos電圧をA/D変換してsin波形とcos波形を取得する。さらに、除算器60がsin波形とcos波形からtanθを算出し、tanθ→θ変換MAP61がtanθよりモータ7の回転角θを求め、その回転角θに基づいてベクトル制御部64がモータ7のベクトル制御を行う。このとき、モータ制御中においては、ベクトル制御装置69からA/D変換器59へA/D変換禁止信号が送信されるので、回転角θは更新されない。
(もっと読む)
磁気検出方法およびその装置
【課題】実装ズレがあった場合に磁気検出の誤差を低減する、2次元平面上での磁気検出方法およびその装置を提供すること。
【解決手段】本発明に係る磁気検出方法の実施形態では、x軸上の1対のホール素子301、302の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きa、切片bを求める。次に、y軸上の1対のホール素子303、304の出力信号から算出される検出信号を、磁石のx座標の関数として直線補間して、傾きc、切片dを求める。次に、1対のホール素子301、302の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きe、切片fを求める。次に、1対のホール素子303、304の出力信号から算出される検出信号を、磁石のy座標の関数として直線補間して、傾きg、切片hを求める。これらのパラメータを用いて、予め定めた数式により磁石の検出位置を算出して磁気検出を行う。
(もっと読む)
回転角度検出装置
【課題】大型化を抑制しつつ検出範囲を拡大することができる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、主動歯車13に噛み合う歯数の異なる第1〜第3の従動歯車14〜16の回転角度を求める。次に、第1及び第2の従動歯車14,15の回転角度に基づき主動歯車13の第1の暫定回転角度を求めるとともに、第2及び第3の従動歯車15,16の回転角度に基づき主動歯車13の第2の暫定回転角度を求める。次に、主動歯車13が第1の暫定回転角度の検出範囲だけ回転した際に第1〜第3の磁気センサ21〜23の検出範囲だけ回転する第1の仮想従動歯車G1、及び主動歯車13が第2の暫定回転角度の検出範囲だけ回転した際に第1〜第3の磁気センサ21〜23の検出範囲だけ回転する第2の仮想従動歯車G2を設定する。そして、第1及び第2の仮想従動歯車G1,G2の回転角度に基づき主動歯車13の回転角度θを求める。
(もっと読む)
回転軸の絶対回転角検出装置
【課題】二つ以上の相対角センサの検出信号を利用し、簡単かつ高精度に回転軸の絶対回転角を検出する。
【解決手段】回転軸12の二つの相対角センサ20P、20Q及び電動モータ22の相対角センサ24から得られる電気角信号Sp、Sq、Srに基づき、角度信号平滑化手段32において、絶対回転角信号Abを求める。この際、角度信号平滑化手段32で得られる絶対回転角信号の所望の周期的変動数Sと、減速機26の減速比a:bと、二つの相対角センサ20P、20Qの軸倍角p、qと、電動モータ22の相対角センサ24の軸倍角rと、回転軸12の許容回転数Nとが、各相対角センサの軸倍角の如何に関わらず、S=|(p+q)×N−r×N×(a/b)|=1の関係を満たすように各値を設定することで、絶対回転角信号Abは回転軸12の絶対回転角と一対一の対応となる。
(もっと読む)
21 - 40 / 64
[ Back to top ]