
Fターム[2F065AA02]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 1次元 (834)
Fターム[2F065AA02]に分類される特許
201 - 220 / 834
検査装置、検査方法および検査プログラム
【課題】複数の突起部を有する検査対象物を迅速に検査する。
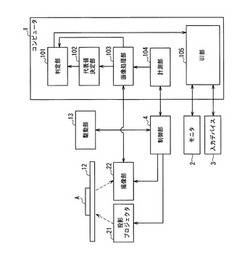
【解決手段】検査装置は、検査対象物A載せる透明なテーブル12と、テーブル12の下面から光の強度が周期的に変化する光パターンを照射する光照射部と、光パターンが照射された検査対象物Aを、テーブル12の下面から撮影する撮像部22と、検査対象物Aの画像を処理して、検査対象物Aの表面の3次元形状を表す表面形状データを生成する画像処理部103と、表面形状データにより表される検査対象物Aにおける複数の突起部それぞれにおいて、テーブル12の上面に対する位置を示す値の代表値を決定する代表値決定部102と、複数の突起部それぞれにおける代表値の分布が予め設定された基準を満たしているかを判定する判定部101と備える。
(もっと読む)
厚さ検出装置

【課題】本発明は被検出物の厚さを測量することができる厚さ検出装置を提供する。
【解決手段】厚さ検出装置20は、検出アーム201及び光学移動センサモジュール202を含む。検出アームは、被検出物T’が通過する時に当接して移動し、且つ、検出アームは、表面を有している。厚さ検出装置は、第一位置に位置する検出アームの表面と第二位置に位置する検出アームの表面をそれぞれ感知し、検出アームが第一位置から第二位置に移動した時の移動量ΔP’を計算し、被検出物の厚さを測量する。
(もっと読む)
フィルム用欠陥マーキング装置及び欠陥マーキング方法
【課題】従来技術に比べて欠陥位置へのマーキング精度を飛躍的に向上することで歩留りを下げることなく、かつ、微小欠陥そのものにマーキングすることで目視検査の工数を削減できるフィルム用欠陥マーキング装置及び欠陥マーキング方法を提供すること。
【解決手段】本発明のフィルム用欠陥マーキング装置は、検査エリア37で欠陥が検出されてからマーキングエリア38でマーキングが施されるまでの欠陥部分の幅方向のズレである蛇行量を検出する第1の検出手段16,28と、検査エリア37で欠陥が検出されてからマーキングエリア38でマーキングが施されるまでの前記欠陥部分の搬送距離を検出する第2の検出手段17,21,23,29と、第1及び第2の検出手段に基づいてマーキングエリア38における欠陥部分の座標を補正してマーキング位置を決定する手段25とを備える。
(もっと読む)
巻尺読取装置および巻尺読取方法
【課題】装置本体に出し入れ可能に設けられた巻尺により測定した測定値を精度よく読み取ることが可能な巻尺読取装置を提供する。
【解決手段】本発明の巻尺読取装置100は、巻尺200の測尺220に付された目盛りおよび目盛り文字を撮像する撮像部160と、撮像画像から目盛り文字および目盛り文字に対応する目盛り線を認識する目盛認識部172と、撮像画像に基づいて、撮像画像内における基準位置から目盛り文字に対応する目盛り線までの画像内距離を算出する画像内距離算出部174と、撮像画像中から認識された目盛り文字、画像内距離、および撮像画像と読み取り位置との位置関係に基づいて、巻尺の測定値を算出する測定値算出部176と、を備える。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビームにより基板を走査して、新たなパターンを下地パターンに合わせて精度良く露光する。
【解決手段】チャック10に位置検出用マークを設け、チャック10の位置を検出しながら、ステージによりチャック10を移動して、各画像取得装置51によりチャック10の位置検出用マークの画像を取得し、検出したチャック10の位置及び画像処理装置50が検出したチャック10の位置検出用マークの位置から、各画像取得装置51の位置ずれを検出して、各移動機構により各画像取得装置51の位置ずれを修正する。各画像取得装置51により基板1の下地パターンの位置検出用マークの画像を取得し、画像処理装置50が検出した基板1の下地パターンの位置検出用マークの位置に応じて、ステージによりチャック10を移動して、光ビーム照射装置20からの光ビームにより基板1を走査する前の基板1の位置決めを行う。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ウエハテーブルの位置計測を高精度に行う。
【解決手段】エンコーダ本体(16Ya,16Yb等)から射出されるレーザ光(Ly1,Ly2等)は、ウエハテーブルWTBにPBS18を介して外部から入射し、露光領域IAの直下に位置する点IAaにて、グレーティング24に到達し、該グレーティングで回折される。そして、グレーティングから戻ってきた第1の偏光成分と、PBSで反射された第2の偏光成分との干渉光を受光することにより、ウエハテーブルWTBの位置情報を計測する。従って、PBSを透過した第1の偏光成分が、第2の偏光成分と再度合成されるまでの間は、ウエハテーブル内を通過し、外部雰囲気中を進行することが無いので、測長ビームがウエハテーブルの周辺雰囲気の揺らぎの影響を受けることなく、高精度なウエハテーブルの位置計測を行うことが可能である。
(もっと読む)
移動体装置及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 駆動系により、アーム部材71から移動体WFSのXY平面に平行な一面に配置されたグレーティングRGに対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果に基づいて移動体が駆動される。この場合、アーム部材からグレーティングRGに計測ビームを照射する構成が採用されているので、ステージ定盤にエンコーダシステムを設ける場合とは異なり、移動体の駆動に起因する悪影響はない。従って、移動体を精度良く駆動することが可能になる。
(もっと読む)
像担持体および画像形成装置
【課題】装置を大型化することなく、安定して像担持体のホームポジションを検出可能な画像形成装置を提供すること。
【解決手段】最表面薄膜層3bが、厚みが比較的厚い厚膜領域31および厚みが比較的薄い薄膜領域32を有し、厚膜領域の厚みd1(nm)および薄膜領域の厚みd2(nm)が関係式;50nm≦d1−d2≦950nm;20nm≦d2<d1≦1000nm;を満たす像担持体3、および光センサ20を備えた画像形成装置であって、像担持体のd1およびd2が、発光センサからの光に対する像担持体外周面の反射率Rと像担持体の最表面薄膜層の厚みd(nm)との関係を表す反射率関数R(d)について、関係式;|R(d1)−R(d2)|≧0.5×{Rmax(d)−Rmin(d)}をさらに満たす画像形成装置。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報を高精度で計測する。
【解決手段】 露光ステーション200では、ウエハを保持するステージWFS1の位置情報は、計測アーム71Aを含む第1の微動ステージ位置計測系により計測され、計測ステーション300では、ウエハを保持するステージWFS2の位置情報は、計測アーム71Bを含む第2の微動ステージ位置計測系により計測される。露光装置100は、ステージWFS2が計測ステーション300から露光ステーション200へ搬送される際、このステージWFS2の位置情報を計測可能な第3の微動ステージ計測系を有する。第3の微動ステージ計測系は、複数のYヘッド96,97を含むエンコーダシステムとレーザ干渉計76a〜76dを含むレーザ干渉計システムとを含む。
(もっと読む)
露光装置及び露光方法
【課題】マスクと基板との位置合わせを安定して処理可能な露光技術を提供する。
【解決手段】 アライメントマークを使用してマスクに対し処理基板を移動させて当該マスクと処理基板との位置合わせをして露光を行う技術である。画像でのマスク側のアライメントマークM2の画素数が、予め設定した基準閾値と一致若しくは当該基準閾値以上となるように撮像装置16の焦点を調整してマスク側の基準位置を演算する。同様にして、基板側の基準位置を演算する。上記演算したマスク側の基準位置を基準として、マスク側の基準位置と処理基板側の基準位置とが一致若しくは予め設定した許容誤差内となるまで、上記処理基板側のアライメントマークM1の画像を取得して当該処理基板側の基準位置を演算する処理を繰り返す。
(もっと読む)
シリンダライナ検査装置およびシリンダライナ検査方法
【課題】ピストン往復動燃焼エンジンのシリンダのシリンダカバーを取り外すことなく、シリンダの内径および表面状態を検査するようにして、当該シリンダライナの検査の時間を短縮する。
【解決手段】燃焼機関のシリンダライナ25の摺動面35を検査する方法および検査装置が提供され、検査装置は、検査工具、制御装置、電力供給と測定データおよび制御信号の伝達のための接続手段60を有する。検査工具は、ベアリングレール70を有し、このベアリングレール70には、ロータリテーブル80、シリンダライナ25の内径と摺動面35とを測定するためと、表面状態を目視検査するための工具90,96とが装架される。検査工具は、被検査シリンダライナ25の開口を通してシリンダライナ25に導入しうるサイズとする。本発明は、特にピストン往復動燃焼機関のシリンダライナ25の検査に適している。
(もっと読む)
電気鉄道保守用車両位置測定装置
【課題】車両の走行位置と通過時刻との関係を高精度に特定することを可能とした電気鉄道保守用車両位置測定装置を提供する。
【解決手段】車両の屋根上に設置されてハンガを撮影するラインセンサカメラ2と、ラインセンサカメラ2によって取得した画像の解析を行う画像処理部とを備える電気鉄道保守用車両位置測定装置において、画像処理部を、ラインセンサカメラ2によって撮影された画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部31aと、ラインセンサ画像上の点列から直線を検出するハフ変換部31bと、ハフ変換部31bによって検出された直線のうち予め設定する基準方向に対する角度が所定の範囲内にある直線をハンガとして抽出するハンガ認識部31cと、ハンガ認識部31cにおいて検出されたハンガが撮影された時刻を記録する時刻記録部31dとから構成した。
(もっと読む)
表面位置の測定装置、露光装置及びデバイス製造方法
【課題】 干渉光の強度のピーク及びコントラストを最適化し、高速かつ高精度に被測定物の表面位置を測定できる測定装置を提供する。
【解決手段】 本発明は、光源から出射され分岐された光のうちの、参照面で反射された参照光と被測定物の表面で反射された測定光とによる干渉光の強度に基づいて前記被測定物の表面位置を測定する測定装置であって、測定光の光量を検出する検出部と、参照光の光量と前記検出部により検出された測定光の光量とに基づいて算出される干渉光の強度が目標範囲に入るように前記光源の光量を制御する制御部と、を備える。
(もっと読む)
パンタグラフ変位測定装置及びトロリ線硬点検出方法
【課題】パタンマッチング処理の精度を向上させることを可能とするパンタグラフ変位測定装置及びトロリ線硬点検出方法を提供する。
【解決手段】ラインセンサカメラ2によってマーカを撮影した画像を処理することによりパンタグラフの加速度を求める画像処理部5Aが、入力画像を作成する入力画像作成部5aと、テンプレートを設定するテンプレート設定部5bと、入力画像を分割する画像分割処理部5cと、テンプレートの拡縮を行うテンプレート拡大・縮小処理部5dと、入力画像上のマーカのピクセル位置を検出するパタンマッチング処理部5eと、マーカのピクセル位置をパンタグラフの実際の変位に変換するパンタグラフ変位計算部5fと、パンタグラフの変位に対して平滑化処理を行うフィルタリング処理部5gと、パンタグラフの加速度を出力する加速度出力部5hとを有する構成とした。
(もっと読む)
透明な物品を非接触検知する装置及び方法
レーザベースの変位検出器(26)を使用して、透明な物品(20)の一つの面に塗布された化粧コーティング(22)を検出し、それによって、レーザ加工システムの中に装填されているときにどの面が最も上になっているかを判定する。具体的には、可視光に対して透明で、レーザ加工システムの中で適切な向きにすることが特に困難である物品(20)が、レーザベースの変位検出器(26)を物品(20)上の部分コーティング(22)と共に使用することによって、向きを定められる。 (もっと読む)
露光方法及び露光装置並びにデバイス製造方法
【課題】高精度なフォーカス制御を実現する。
【解決手段】第1基板が載置されたステージを所定方向に走査し、該所定方向に沿って設けられた第1及び第2投影光学ユニットを介して第1基板のパターンを第2基板に露光する。ステージに第3基板を載置してステージを所定方向に走査する第1ステップと、第3基板上に所定方向に沿って配置された複数のマークを第1投影光学ユニットを介して検出し、複数のマークに対応する第1投影光学ユニットの第1フォーカス位置情報を計測する第2ステップと、複数のマークを第2投影光学ユニットを介して検出し、複数のマークに対応する第2投影光学ユニットの第2フォーカス位置情報を計測する第3ステップと、第1及び第2フォーカス位置情報に基づいて、前記パターンに対応する第1及び第2投影光学ユニットの各フォーカス位置と第2基板との相対位置を調整する第4ステップと、を含む。
(もっと読む)
正反射面の相対位置を測定する方法及び装置
【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
交換可能なクロマティックポイントセンサ構成要素の強度補償
【課題】交換可能なクロマティックポイントセンサ構成要素の強度補償を提供する。
【解決手段】クロマティックポイントセンサ(CPS)の光源および波長検出器サブシステムの非均一応答に補償を提供する方法が提供される。光源からの光は、CPS光学ペンを通る測定路を迂回し、迂回光を波長検出器に提供して、検出器のピクセルにわたって分布した未処理強度プロファイルを提供する光路に入力される。結果として生成される未処理強度プロファイル信号のセットが解析されて、未処理強度プロファイル信号内に発生する波長依存強度変動の誤差補償係数のセットが決定される。後に、誤差補償係数を適用して、本発明を使用しない場合にはCPS距離測定プロファイル信号データのピーク領域内の信号の形状に発生する歪みおよび非対称性を低減することができる。開示される方法は、様々な実施形態において、CPS構成要素に強化された精度、ロバスト性、現場でのテスト、および交換可能性を提供することができる。
(もっと読む)
光ファイバセンサ及びこれを備えた検出装置
【課題】所定の経路に沿った2点間の変位を再現性良く検出可能な光ファイバセンサを提供する。
【解決手段】光ファイバセンサ1は、ヘテロコア部HPが第1点と第2点との間に位置するよう、第1点と第2点とに固定された光ファイバ3と、光ファイバ3のヘテロコア部HPと第2点との間の一部が固定され、摺動可能な光ファイバ固定部材4bと、光ファイバ固定部材4bを第1点に向けて付勢する付勢手段5と、光ファイバ固定部材4bに固定された部分と第1点との間における光ファイバの変形3を、所定の薄厚空間S内に規制する規制部材6とを備える。光ファイバセンサ1は、所定の経路に沿った第1点と第2点との間の変位が検出可能である。
(もっと読む)
201 - 220 / 834
[ Back to top ]