
Fターム[2F065AA25]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 段差;深さ (264)
Fターム[2F065AA25]に分類される特許
81 - 100 / 264
立体結像レンズモジュール
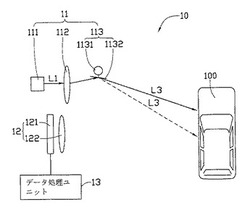
【課題】本発明は、コストが低く、体積が小さく、且つ便利に携帯することができる立体結像レンズモジュールを提供することを目的とする。
【解決手段】立体結像レンズモジュールは、被写体の立体映像を結像することに用いられ、点光源及び2次元スキャン装置を含み、前記点光源からの光線は所定のパターンを形成し、且つ前記2次元スキャン装置の駆動によって、前記被写体をマトリックス形式にスキャンする点光源スキャン装置と、前記被写体に反射される光線を受けて結像することに用いられる映像感知モジュールと、前記映像感知モジュールからの映像情報を受信し、且つ前記映像情報をフーリエ変換して、前記被写体の深さ情報を獲得するデータ処理ユニットと、を備える。
(もっと読む)
三次元形状測定装置及び三次元形状測定方法

【課題】被覆膜の厚さと独立して、基板よりも反射率の低い被覆膜付きの基板上に存在するパターンの三次元形状を非破壊で測定することができる三次元形状測定装置を提供することである。
【解決手段】可視光に対して透明な被覆膜付きの基板上に設けられた不透明なパターンの物理的三次元形状を測定する三次元形状測定装置であって、第1波長の照明光と、前記第1波長と異なる第2波長の照明光とを切り替えて照射する光源部と、前記第1波長の照明光を照射したときの前記パターンと前記被覆膜との第1仮想段差と、前記第2波長の照明光を照射したときの前記パターンと前記被覆膜との第2仮想段差とを測定する光検出器と、前記第1仮想段差と前記第2仮想段差とに基づいて、前記パターンの物理的三次元形状を決定する処理部とを備える。
(もっと読む)
走査干渉分光を用いた複雑な表面構造のプロファイリング
【課題】表面高さ情報および/またはその複雑な表面構造についての情報を、抽出すること。
【解決手段】試験対象物の第1の表面箇所に対する走査干渉分光信号から導出可能な情報と試験対象物の複数のモデルに対応する情報とを比較することを含む方法であって、複数のモデルは、試験対象物に対する一連の特性によってパラメータ化される方法。比較される導出可能な情報は、試験対象物の第1の箇所における走査干渉分光信号の形状に関する。
(もっと読む)
生体組織表面解析装置、生体組織表面解析プログラム、および生体組織表面解析方法
【課題】生体組織の3次元的な定量評価を簡単に行う。
【解決手段】測定器5に接続可能な生体組織表面解析装置1は、生体組織を含む測定対象物Aの表面の3次元形状を表す表面形状データを入力するデータ取得部105と、表面形状データにより表される表面の中で解析範囲を決定する範囲決定部106と、解析範囲における前記表面の凹凸を抑制した基準面を生成する基準面設定部107と、測定対象物Aの表面と基準面とを比較することにより特徴領域を抽出する検出部108と、特徴領域の数、特徴領域の面積、および基準面に対する凹凸の体積のうち、少なくともいずれかを1つを計算する解析部109とを備える。
(もっと読む)
物体測定装置及び物体測定プログラム
【課題】ユーザが任意の2点を指定する操作を行うことなく、実物の測定器具を用いて測定した場合と同様の測定値を算出することができるようにする。
【解決手段】操作デバイス14が仮想ノギスBに対する移動操作を受け付けて、移動処理部15が仮想ノギスBが形成する測定空間ms内に測定対象物Aが含まれる位置まで、その仮想ノギスBのジョウB1,B2を移動すると、座標系設定部16が測定空間msにローカル座標系を設定し、測定値算出部17がローカル座標系のv方向において、点群データの最大値と最小値を検出し、その最大値と最小値の差分値を測定対象物Aの測定値として算出する。
(もっと読む)
内視鏡装置および計測方法
【課題】計測により適した位置をユーザに知らせることができる内視鏡装置および計測方法を提供する。
【解決手段】CPU18は、被写体の表面の曲率情報に基づいて、その表面を近似する平面とその表面との交点のうち2つの交点間の空間距離を算出する。映像信号処理回路12は、映像信号に基づく画像上に、2つの交点間の空間距離分の幅を示す目印を表示するための表示信号を生成する。CPU18は、画像上で指定された点の空間座標を算出し、少なくとも3点の空間座標で決まる平面と1点の空間座標との空間距離を算出する。
(もっと読む)
深さ測定装置および深さ測定方法
【課題】凹部を有する被測定物に対して傷を付ける恐れなく、かつ精度よく凹部の深さを測定できる深さ測定装置および深さ測定方法を提供すること。
【解決手段】基台11と、被測定物100が載置される載置台17と、を有し、基台11と載置台17とが相対移動可能な移動ステージ10と、載置台17に対して着脱自在で被測定物100と置き換えて載置可能に設けられ、光線を反射可能な平面状の反射部を有する平面板と、基台11に設けられ、可干渉性の光束を参照光と測定光L50とに分割し測定光L50と参照光との光路差に基づく干渉縞を観察する干渉縞観察部20と、載置台17に載置された前記平面板に対して測定光L50が照射された際に前記干渉縞の本数が最少となる基台11と載置台17との位置関係を原点とした基台11と載置台17との相対移動量を測定する移動量測定部30と、を備える。
(もっと読む)
目封止ハニカム構造体の検査装置及び目封止ハニカム構造体の検査方法
【課題】短時間かつ非接触にて、目封止部の深さ及び目封止部の欠陥を、同時に検査することが可能な目封止ハニカム構造体の検査装置を提供する。
【解決手段】一方の端面35から他方の端面36まで貫通する複数のセルを区画形成する多孔質の隔壁を有し、セルの端部に目封止部を有する筒状の目封止ハニカム構造体31を検査対象として、検査対象である目封止ハニカム構造体31の一方の端面35を照らす光源1と、光源1から一方の端面35に照射されて目封止ハニカム構造体31の目封止部を透過して他方の端面36から放射される光を、集光するカメラ側レンズ2と、カメラ側レンズ2で集光した光を、受光するカメラ3と、カメラ3で受光した光を画像処理して、目封止ハニカム構造体31の目封止部を透過した光の明暗を表示する画像処理機4を備えた目封止ハニカム構造体の検査装置100。
(もっと読む)
表面状態検出方法とその装置
【課題】簡単な構成で、被検体表面の比較的浅い凹凸や色の変化を検出する方法との装置を提供する。
【解決手段】タイヤ周方向に光軸を中心とした正規分布の強度分布を有する、赤色光を照射する第1のレーザー11Aと青色光を照射する第2のレーザー11Bとを、タイヤ周方向に所定距離だけ離れて配置して、未加硫タイヤ50のサイドウォール部51表面に赤色光と青色光とを同時に照射するとともに、赤色光と青色光とが重なった部分をカラーラインカメラ12で撮影して、赤色光及び青色光の反射光の強度Ir,Ibをそれぞれ算出した後、強度比R=(Ir/Ib)を算出し、この強度比Rと予め求めておいた強度比と基準位置z0からの高さとの関係を表すR−zテーブル34Tとを用いて、基準位置z0からの高さhを算出し、サイドウォール部51表面の凹凸状態を検出するようにした。
(もっと読む)
基板の性質を測定する方法、スキャトロメータ、及び、リソグラフィ装置
【課題】誤った低いオーバーレイ計算を識別する方法を提供する。
【解決手段】スキャトロメータで1次回折次数と0次回折次数の両方が検出される。1次回折次数はオーバーレイエラーを検出するために使用される。その後、これがバイアスより大きくしかし回折格子のピッチより小さい大きさの誤ったオーバーレイエラー計算である場合、フラグを立てるために0次回折次数が使用される。
(もっと読む)
帯状部材の形状検出方法とその装置
【課題】ラインセンサーの台数を増やすことなく、帯状部材の形状を精度よく検出する方法とその装置を提供する。
【解決手段】所定の速度で回転する成型ドラム21に貼り付けられた帯状のタイヤ構成部材40の位置座標を二次元変位センサー11を用いて計測する際に、二次元変位センサー11のラインビームの延長方向を帯状のタイヤ構成部材40の長手方向とし、二次元変位センサー11で計測した異なる計測角度で撮影した、始端40aもしくは終端40bなどの同一箇所の変位量のデータを抽出するとともに、前記同一箇所の座標データを、前記同一箇所がラインビームの中心にくるように座標変換し、これら座標変換された複数の異なる計測角度で算出した同一箇所の座標データを合成することで、前記同一箇所の座標を特定するようにした。
(もっと読む)
円柱形状を有する物体の計測方法および計測装置
【課題】アクティブステレオ法を用いて円柱形状を有する物体の段差間隔、半径、中心位置を高精度に計測する計測方法及びその計測装置を提供する。
【解決手段】円柱の段差面と側面に各々少なくとも3点のビームを投影し、同時に、別の段差面に少なくとも3点のビームを投影し、ポイントビームの全てが写るように異なる方向から第1の画像および第2の画像を撮像し、前記第1および第2の画像からステレオ法に基づき全てのビームの座標を算出し、算出された座標のうち、一方の段差面上の3点のビームの座標から、段差面の平面の式を算出し、他方の段差面上の1点のビームと前記算出した平面との距離を算出することにより段差間距離を求め、算出された座標のうち、側面上の3点のビームの座標を、前記算出した平面に投影し、投影された3点を通る円の式に基づいて、円柱の半径および中心を算出する。
(もっと読む)
組み付け精度測定方法および測定装置
【課題】車体の隣接する部品間の隙間および段差を高い精度で測定することが可能な組み付け精度測定方法および測定装置を提供する。
【解決手段】照射ヘッドとCCDカメラとを含む非接触式の測定ユニットにより被測定部の隙間および段差を測定して、その測定結果に基づいてCAD上に作成された当該被測定部の測定画像と対応するマスタ画像とをベストフィット処理することにより測定画像を補完して出力画像を作成して、該出力画像に基づいて被測定部の隙間および段差を算出するので、被測定部の隙間および段差を極めて高い精度で測定することが可能になる。
(もっと読む)
車両タイヤのトレッド深さを測定する方法及びその装置
タイヤを、測定ステーション上を回転通過させるか或いは測定ステーション上に置く;該タイヤのトレッドを、少なくとも1つの測定ライン上で、タイヤ回転方向に対して横断する方向で光学的に感知する;この際に、光源から広がる扇状光線が前記タイヤ表面で反射され、反射した扇状光線の信号がセンサにより記録される、そして、前記反射した扇状光線の前記信号を三角測量法により評価する、タイヤが車両に装着された状態で車両タイヤのトレッド深さを決定する方法において、前記信号が前記タイヤ表面に対して非直交的に記録される方法。 (もっと読む)
半導体領域の接合深さを測定する方法および装置
【課題】光変調光反射測定技術を用いて、基板の半導体接合の深さの値を測定する方法。
【解決手段】半導体接合を含む少なくとも第1領域を有する基板を得る工程と、参照領域を得る工程と、少なくとも1回、以下のシーケンス、光変調光反射率測定のための測定パラメータのセットを選択する工程110、選択されたパラメータのセットを用いて、少なくとも第1領域の上で、半導体接合を有する基板を表す第1光信号を測定する工程120、選択されたパラメータのセットを用いて、参照領域の上で、第2光信号を測定する工程130、および第2光信号に対する第1光信号の比を測定し(140)、この後に、この比から、半導体接合の深さを導き出す工程150を行う工程とを含む。
(もっと読む)
光学式ゲージ及び3次元表面プロファイル測定方法
【課題】
【解決手段】3次元表面プロファイル測定のための小視野を有する光学式ゲージ(10)は、光源(22)と、照射光路に沿って光を誘導する照射光学系(28、30、42)とを有するプロジェクタ(20)を含む。光学格子装置(34)は、照射光路に配置され、構造化光パターン(46)を照射するために照射光の分布を変更する。移相装置(47)は、前記被測定表面(80)上の所望の位相ずれを伴う少なくとも3つの位置へ構造化光パターンを移動する。ビューア(50)は、照射光路と平行ではない観察光路を有する観察光学系と、前記表面からの構造化光パターンの拡散反射の画像を感知する光感知アレイ(58)と、画像を記録するカメラ(57)とを含む。光学式ゲージは、カメラと通信するデータ入力部と、画像から得られる表面輪郭情報に基づいてプロファイリング対象表面をモデル化するプロセッサとを具備するコンピュータ(61)をさらに含む。
(もっと読む)
光学式表面測定装置及び方法
【課題】測定対象物の表面で各地点の微細な高さ変化(段差)や突出、凹入、表面損傷、表面粗さなどの表面状態を正確に測定できる光学式表面測定装置及び方法を提供する。
【解決手段】干渉計の信号及びPSDの焦点誤差信号を共に利用することで、測定対象物の微細な表面状態をより正確に測定することを特徴とする。
(もっと読む)
ステム端部位置測定装置およびその方法
【課題】エンジンの機種に関わらずステム端部の位置を測定できるステム端部位置測定装置を提供する。
【解決手段】エンジン10に形成された給排気口11、12中にバルブステム14を配置した状態において、バルブステムの端部141の軸方向の二次元形状をレーザ変位測定し、さらに、エンジン10に形成されたカムジャーナル軸受け17の二次元半円形状をレーザ変位測定するレーザ変位測定部42と、レーザ変位測定部42による二次元測定結果から、バルブステム14の端部141の位置とカムジャーナル軸受け17の位置との距離を演算する演算部50とを有するステム端部位置測定装置。
(もっと読む)
開先部最深位置検出装置および開先部最深位置検出方法
【課題】鋼管の突き合わせ部外周面に形成される開先部における最深位置を精度良く検出し得る開先部最深位置検出装置および検出方法を提供する。
【解決手段】この開先部最深位置検出装置1は、開先部Ksに向けてレーザ光Lをスポット照射してその反射光量の程度に応じてレーザ照射強度を変えつつ、照射されたレーザ光とその反射光とから開先部深さを計測するスポット型レーザ距離計3と、このスポット型レーザ距離計3を走査方向Sに移動させる駆動機構4と、駆動機構4によって駆動された走査方向Sでの位置に対応する走査位置情報、およびスポット型レーザ距離計3で計測された開先部深さ情報を取得し、それらの情報に基づいて開先部の最深位置を算出するコントローラ20とを有する。
(もっと読む)
光切断法と点光による深さ高さの測定法の融合光学システム
【課題】 光切断法による深さ高さの形状観察光学系と点光による深さ高さ測定法による光学系を融合したZ測定システムを提供する。
【解決手段】 スリット光と点光を同軸上に照射し、スリット像上の中心に点光像が来るように配置した像を斜め方向からの光軸により測定対象物上に結像させ、この合成像を全反射方向の光軸を通して受光し、それぞれ観察側の素子上(14)及び受光センサー側の素子上(15)に結像させる光学系を発明。スリット像による深さ高さの形状認識と点光による高精度なZ軸測定が同一光学系で実現できるのが特徴である。
(もっと読む)
81 - 100 / 264
[ Back to top ]