
Fターム[2F065AA25]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 段差;深さ (264)
Fターム[2F065AA25]に分類される特許
141 - 160 / 264
校正用ターゲット、校正支援装置、校正支援方法、および校正支援プログラム
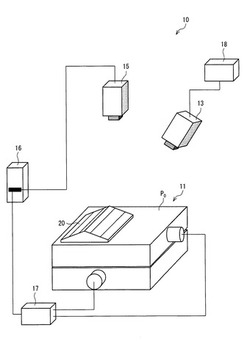
【課題】基準面と撮像ユニットとの位置関係の校正を容易に行う。
【解決手段】基準面に載置された撮影対象の撮影を行う撮像ユニット15に関して、撮像ユニット15の光軸方向を校正するための校正用ターゲット20である。校正用ターゲット20は、基準面との接触面となる底面と、交線が底面と平行である2つの傾斜面とを有している。2つの傾斜面には、底面に正射影したパタンが同じである校正用パタンがそれぞれ形成されている。撮像ユニット15によって撮影された校正用ターゲット20の撮影画像を、画像解析・処理ユニット16は、2つの傾斜面にそれぞれ形成された2つの校正用パタンを認識し、認識した2つの校正用パタンの寸法を算出し、算出した2つの校正用パタンの寸法に基づいて、校正のための校正情報を作成する。
(もっと読む)
印刷半田検査方法及び装置

【課題】印刷半田の状態を的確に検査することができる印刷半田検査方法及び装置を提供することにある。
【解決手段】基板10に印刷された半田10xの2次元画像を撮像する光学系20、30と、当該印刷半田の3次元画像を撮像する光学系20、30と、撮像した2次元画像及び3次元画像を処理して、該印刷半田の底部面積、パッド面積等の2次元性状の項目61を測定すると共に断面積、突起面積、平均高さ、ピーク高さ、体積等の3次元性状の項目62を測定し、当該測定項目に基づいて該印刷半田の形状を決定し、また、少なくとも2つの前記測定項目をマトリックス状に組み合わせて該印刷半田の形成合否を判定する検査部50、60、80とを備える。これにより、2次元測定と3次元測定をそれぞれ単独で実施するよりも、正確に印刷半田の形状を決定することが可能となると共に正確に印刷半田の形成合否を判定することが可能となる。
(もっと読む)
深さ測定装置及び深さ測定方法
【課題】高アスペクト比のビィアホールを高分解能で測定できる深さ測定装置及び方法を実現する。
【解決手段】深さ測定装置は白色光の光ビーム発生手段1、光ビームを測定ビームと参照ビームとに分割するビームスプリッタ10、測定ビームを試料に投射する対物レンズ16、参照ビームを反射させる参照ミラー14、前記測定ビームと参照ビームの相対的な光路長差を変化させるフリンジスキャン手段14,15、試料からの反射光と参照ミラーからの反射光とを合成して干渉ビームを発生するビーム合成手段10、対物レンズと試料間の相対距離を変化させる駆動機構20、対物レンズと試料間の相対位置を検出する位置検出手段21、干渉ビームを受光してフリンジスキャン信号を出力する光検出手段22、フリンジスキャン信号に基づく変位情報と前記位置検出手段から出力される相対位置情報とに基づいて凹部の深さ情報を出力する信号処理回路を具える。
(もっと読む)
干渉縞安定化装置およびそれを用いた非破壊検査装置
【課題】参照光と検査対象物で反射され周波数変調された信号光との干渉縞を安定化することが可能な干渉縞安定化装置、および検査対象物の内部欠陥の検出精度の向上が可能な非破壊検査装置を提供する。
【解決手段】非破壊検査装置は、検出用レーザ11と、弾性波励起用レーザ21と、信号光と参照光とを干渉させ検査対象物Obの振動を検出する振動検出手段30と、干渉縞安定化装置40とを備える。干渉縞安定化装置40は、信号光から分岐された補正用信号光と参照光から分岐された補正用参照光との干渉縞を検出する干渉縞検出手段41と、補正用参照光を分岐する前の参照光の光路上に配設され参照光の波面を制御する波面制御用ミラー42と、干渉縞検出手段41により検出される干渉縞の安定状態からの位相シフトを抑制するように波面制御用ミラー42の位置を制御する制御手段43とを備える。
(もっと読む)
シート状物の検査方法及び検査装置
【課題】打ち抜きにより形成された外周縁のへこみ部分を効率良く検査することのできるシート状物の検査方法及び検査装置を提供することである。
【解決手段】打ち抜きにより形成されたシート状物の外周縁形状の適否を検査するシート状物の検査方法であって、前記シート状物を含む所定視野範囲を撮影して、該シート状物を表す物体画像を含む画像を取得する画像取得ステップ(S1)と、前記取得された画像において、前記シート状物の外周縁に形成されたへこみ部分に相当する前記物体画像のへこみ部分の深さを計測するへこみ深さ計測ステップ(S4〜S7)と、計測された前記物体画像のへこみ部分の深さが所定許容範囲内であるか否かを前記シート状物の外周縁形状の適否として判定する第1判定ステップ(S8)とを有する構成となる。
(もっと読む)
計測ツールのキャリブレーションに使用する基板を形成する方法、キャリブレーション基板および計測ツールをキャリブレーションする方法
【課題】計測ツール内で方向に依存するオフセットをより簡単に補償することが可能な技術を提供する。
【解決手段】計測ツール内の方向に依存する変動を補償するために、計測ツールの較正に使用する基板を形成する方法。基板形成方法は放射感応性材料の層を基板表面に設け、第一セットのパターンフィーチャ及び第二セットのパターンフィーチャを含むキャリブレーションパターンをもつパターンニングデバイス(リソグラフィ装置)により露光する。
(もっと読む)
3次元測定装置及び検査装置
【課題】高速で試料表面を検査することができる3次元測定装置及び検査装置を実現する。
【解決手段】本発明による3次元測定装置は、光源装置(1,2,3)からライン状の照明ビームを発生する。照明光学系(4,5)を介して試料表面(6)を走査する。試料から出射したライン状の反射ビームは、結像光学系(8,9)を介してその結像面上にスリット像を形成する。結像光学系の結像面に、2個のラインセンサ(10,11)により構成される光検出手段を配置する。光検出手段からの出力信号に基づいて試料表面の高さ方向の変位情報及び試料表面の2次元画像情報を出力する信号処理回路とを具える。信号処理回路は、2つのラインセンサの対応する受光素子の出力信号間の差分信号を出力する手段(33)及び加算信号を出力する手段(34)を有し、差分信号に基づいて試料表面の高さ方向の変位情報を出力し、前記加算信号に基づいて試料表面の2次元画像情報を出力する。
(もっと読む)
画像形成装置
【課題】簡単な演算で記録材の種類が判別できる、記録材の種類判別装置,方法を提供し、また、この装置,方法を用いて、記録材の種類に依存しない安定した画質を得ることができる画像形成装置を提供する。
【解決手段】記録材の表面画像を読み取る読取り手段の読取り結果から、第一の演算手段で記録材表面の凹凸の深さを演算して演算結果をレジスタAに入れ、第二の演算手段で記録材表面の凹凸間隔を演算して演算結果をレジスタBに入れる。このレジスタA,Bの数値にもとづいて、図示のように、グロス紙801,普通紙802,ラフ紙803,OHT804といった記録材の種類を判別する。
(もっと読む)
記録材判別装置および記録材判別方法
【課題】簡単な演算で記録材の種類が判別できる、記録材の種類判別装置,方法を提供し、また、この装置,方法を用いて、記録材の種類に依存しない安定した画質を得ることができる画像形成装置を提供する。
【解決手段】記録材の表面画像を読み取る読取り手段の読取り結果から、第一の演算手段で記録材表面の凹凸の深さを演算して演算結果をレジスタAに入れ、第二の演算手段で記録材表面の凹凸間隔を演算して演算結果をレジスタBに入れる。このレジスタA,Bの数値にもとづいて、図示のように、グロス紙801,普通紙802,ラフ紙803,OHT804といった記録材の種類を判別する。
(もっと読む)
透明膜の膜厚測定方法およびその装置
【課題】透過性を有する光学部材の表面を部分的に透明膜で被覆した測定対象物の当該透明膜の膜厚を干渉計を利用して求める。
【解決手段】表面を部分的に透明膜で被覆され、かつ、透過性を有する光学部材からなる測定対象物の裏面からの反射光と参照面からの反射光により生じる干渉縞波形のピークを検出し、当該ピークの位置情報を利用して光学部材の裏面高さを算出した後に、当該裏面高さと透明膜の既知の屈折率から透明膜の屈折率の影響を除去した物理膜厚を求める。
(もっと読む)
立体形状測定装置
本発明の立体形状測定装置は、光源と、前記光源からの照明光を分割するビーム分割器と、前記ビーム分割器からの照明光が照射され、最高点と最低点との間の段差を有する測定対象物と、前記ビーム分割器からの照明光が照射される基準面と、前記測定対象物の表面及び前記基準面から反射されて合成された干渉紋を撮影する撮影装置と、前記撮影装置を通して撮影された映像を処理する制御コンピュータとを含む立体形状測定装置に関するもので、前記基準面は、前記測定対象物の最高点反射距離及び前記測定対象物の最低点反射距離とそれぞれ同一の反射距離を提供する反射距離調節手段をさらに備える。 (もっと読む)
計測装置
【課題】予め多種類の被測定物に対して変換用のデータを準備する必要がなく、しかも、被測定物の計測点の周辺を観察できる計測装置を提供する。
【解決手段】色収差によって、波長成分毎に異なる合焦位置からの反射光のみが計測光学系のピンホール20を通過して検出器26によって検出され、検出出力が最大となる波長成分に基づいて、ワーク23の表面の位置を計測する一方、撮像光学系では、波長成分毎に、異なる合焦位置のワーク23からの反射光が、ピンホールアレー28の各ピンホール上に結像されて撮像され、計測光学系による計測点の周辺の画像を、深い被写界深度で観察できるようにしている。
(もっと読む)
透明膜の屈折率測定方法およびその装置並びに透明膜の膜厚測定方法およびその装置
【課題】測定対象物の表面を覆う透明膜の段差部分の屈折率と当該屈折率の影響を除去した物理膜厚とを干渉計を利用して精度よく、かつ高速に求める。
【解決手段】測定対象物と参照面とに所定周波数帯域の白色光を照射しながら両照射距離を相対的に変動させて干渉を生じさせ、CCDカメラで測定対象物の表面画像を取得する。この取得した画像の画素ごとに光強度値のピークとなる位置情報を求め、求まるピーク位置情報から透明膜の表面高さおよび透明膜の屈折率の影響を含む光学膜厚を求め、所定領域と当該領域と隣接する領域の光学膜厚の偏差を算出し、偏差の生じた領域の裏面が平坦であると仮定し、両領域の表面高さおよび光学膜厚の測定結果を利用して屈折率および物理膜厚を求める。
(もっと読む)
三次元測定装置及び携帯型計測器
【課題】反射コート材を塗布せずとも、半透明部分を含む被測定物の三次元形状を正確に計測することができるようにする。
【解決手段】非偏光の入射光が一定の入射角をもって試料面に入射したとき、その表面反射光はS偏光となり、内部散乱光は非偏光となる。そこで、表面反射光及び内部散乱光が受光部で受光される光路上に、P偏光成分を吸収することが可能な直線偏光板を配置する。これにより、表面反射光と内部散乱光のS偏光成分とが受光される状態を形成することができる。つまり、内部散乱光だけを減衰させた状態で、表面反射光に由来するS偏光を受光部で受光させることができる。
(もっと読む)
金属膜の埋設深さ測定方法
【課題】透光性材料の表面からその透光性材料に埋設された金属膜までの深さを非破壊で精度良く簡便に測定するための金属膜の埋設深さ測定方法を提供する。
【解決手段】赤外光を用いて、金属膜が埋設された透光性材料の反射スペクトルの測定を一定の入射角θで行うことによって反射スペクトルを求め、得られた反射スペクトルの2500cm−1以上の波数域における周期的な干渉縞の周期P(cm−1)を求め、透光性材料の屈折率をnとして、透光性材料の表面から金属膜までの深さd(cm)を、d=1/(2P(n2−sin2θ)0.5)により求める。
(もっと読む)
ステレオ画像対から3次元の頭部姿勢をリアルタイムで推定するための装置及びプログラム
【課題】3Dの頭部姿勢をリアルタイムで正確に検出できる装置を提供する。
【解決手段】リアルタイムで頭部の姿勢を推定する装置は、ステレオ画像対の目特定部と、基準座標系を参照して3Dの目の位置を決定する処理と、画像対中の顔のサイズ及びホロプタ範囲を推定するホロプタ範囲推定部と、画像画素間のホロプタ範囲内でディスパリティ値を推定するディスパリティ推定部と、補正された画像対、ディスパリティ値及びカメラのキャリブレーションパラメータに基づいて3D表面データを再構築する3D表面再構築モジュール86と、最小二乗誤差当てはめを利用して3D顔平面を3D表面データに当てはめる平面当てはめ処理と、3D表面データに当てはめられた面にロックされた頭部姿勢を表す顔座標系を規定する3D頭部姿勢推定モジュール88とを含む。モジュール88はさらに、顔座標系と基準座標系との変換を規定する。
(もっと読む)
溶接方法、および段差部の検出装置
【課題】簡単な構成で、溶接作業線を規定するための段差部を容易に短時間で精度良く検出することができる方法および装置を提供する。
【解決手段】ワーク1、2を重ねてその段差部Dを検出することによりこの段差部Dを溶接するための溶接作業線Wを規定し、この規定された溶接作業線Wに従って段差部Dを溶接する方法であって、段差部Dを横切る複数の線状光Lnを段差部D上から所定の角度αで照射して、段差部Dにより切断される各光切断線ln、ln’を段差部D上から撮像し、この撮像された各光切断線ln、ln’を画像処理して段差部Dにおける座標(Xn,Yn)あるいは(Xn’,Yn’)を抽出し、抽出された光切断線ln、ln’の端部の各座標(Xn,Yn)、(Xn’,Yn’)に基づいて段差部Dを検出する。
(もっと読む)
表面欠陥検査システム、方法及びプログラム
【課題】測定対象物が横断面形状において両端部が低くなる或いは高くなる曲線を有する長丈材である場合にも、表面欠陥の検出精度を高める。
【解決手段】周期的に変調された線状レーザ光を測定対象物2の表面に照射するレーザ装置10と、測定対象物2からの反射光を撮像する遅延積分型カメラ30とを用いて、測定対象物2に対する線状レーザ光の照射位置を連続的にずらしながら、遅延積分型カメラ30により測定対象物2からの反射光を撮像して光切断画像を出力し、測定対象物2の表面欠陥を検出する表面欠陥検査システムであって、測定対象物2を含んで撮像された輝度画像に基づいて、測定対象物2のエッジ位置を検出するエッジ位置検出511と、エッジ位置検出部511で検出されたエッジ位置に基づいて、遅延積分型カメラ30で得られた画像にセンタリング処理を行うセンタリング処理部507とを備える。
(もっと読む)
半導体検査装置及び半導体装置の製造方法
【課題】半導体装置が良品であるか否かを精度良く判断することができる半導体検査装置を提供する。
【解決手段】本発明に係る半導体検査装置は、第1の配線層に属する第1の配線を有する半導体装置の上方から該半導体装置を撮像して画像データを生成する撮像部12と、前記画像データを前記半導体装置の標準画像データと比較することにより、前記半導体装置の上方から見た場合に前記第1の配線と重なっている異物を検出する異物検出部13と、前記異物から前記第1の配線までの深さ方向の距離を算出し、該距離が基準値以下である場合に、前記半導体装置が不良であると判断する判断部15とを具備する。
(もっと読む)
画像解析システム、及び画像解析プログラム
【課題】ステレオ画像から高い精度で対応点の抽出を行い、撮影対象物の深度情報をより正確に算出する画像解析システム及び画像解析プログラムを提供する。
【解決手段】単一の撮影対象物を異なる撮影位置からカラー撮影して得た二以上の画像のうち任意の一対の第一画像及び第二画像の画像データを、画像解析コンピュータ10に取り込んで解析する画像解析システムであって、画像解析コンピュータは、第一画像内の任意の対照点周りに設定した第一局所領域、及び同一の大きさで第二画像内を走査させる第二局所領域のそれぞれにおいて、画素情報値のコントラストの大きさに基づいて画素情報値に重み係数を付与して第一局所領域及び第二局所領域の類似度を算出し、類似度の最も高い第二局所領域から対照点に対応する対応点を抽出する対応点抽出手段30と、対応点及び対照点の座標に基づいて撮影対象物の深度情報を算出する深度情報算出手段41とを具備する。
(もっと読む)
141 - 160 / 264
[ Back to top ]