
Fターム[2F065AA25]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 段差;深さ (264)
Fターム[2F065AA25]に分類される特許
121 - 140 / 264
検査方法及び装置、リソグラフィ装置、リソグラフィ処理セル、並びに、デバイス製造方法
【課題】測定したスペクトルをライブラリに記憶された計算スペクトルと比較し、リソグラフィプロセスの少なくとも1つのプロセスパラメータを割り出す方法の提供。
【解決手段】第一系列の較正スペクトルが少なくとも1つの基準パターンから計算され、各スペクトルは基準パターンの生成に使用される装置のパラメータを考慮せずに個々の基準パターンの少なくとも1つの構造パラメータの異なる既知の値を使用して計算され、各スペクトルが中央ライブラリに記憶される。ターゲットスペクトルについて記憶されたスペクトルの少なくとも1つに対応する第二系列の較正スペクトルがターゲットスペクトルを測定する装置のパラメータを使用して計算される。測定ターゲットスペクトルは放射ビームをターゲットパターンに誘導することによって生成される。測定ターゲットスペクトルと第二系列の較正スペクトルを比較し、ターゲットパターンの構造パラメータの値を導出する。
(もっと読む)
欠陥検査装置、欠陥検査方法及び板状体の製造方法

【課題】透明性を有する板状体中の欠陥の、板状体の厚さ方向の位置を測定する際、2台のカメラの位置合わせやキャリブレーションを必要としない、簡易な構成の装置で欠陥の位置を測定する。
【解決手段】欠陥検査装置は、カメラと、板状体とカメラとの間に設けられたハーフミラと、を有する。これにより、カメラは、2つの異なった角度の視線で欠陥の像を撮影する。この2つの視線で撮影した欠陥の像同士の位置ずれ量に基づいて、欠陥の位置を算出する。
(もっと読む)
計測方法
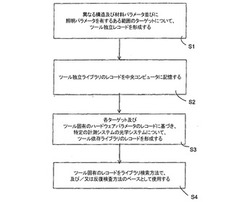
【課題】凹部の形状を正確に把握することができる計測方法を提供する。
【解決手段】絶縁膜に形成された凹部の底面に対する側壁の角度を測定する工程(処理S1)と、凹部の底面に対する側壁の角度、幅寸法、深さ寸法を含んだパラメータ群を複数設定し、複数のパラメータ群にそれぞれ関連づけられた複数の反射光の波形を有するライブラリを作成する工程(処理S2)と、凹部に対し光を照射する工程と(処理S4)、反射光を検出する工程(処理S5)と、反射光の波形と、ライブラリから選択した波形とを照合する工程(処理S6)と、反射光の波形とライブラリから選択した波形とのずれが所定値未満である場合に、選択した波形に関連づけられた凹部の幅寸法等のパラメータを最適値とし、凹部の形状を把握する工程を含む。ライブラリの複数のパラメータ群の凹部の底面に対する側壁の角度は処理S1での測定値である。
(もっと読む)
エッチング深さの検出方法並びにエッチングモニター装置及びエッチング装置
【課題】 エッチング深さを短時間で計算することができる時間応答性に優れたエッチング深さの検出方法を提供する。
【解決手段】 本発明のエッチング深さの検出方法は、半導体ウエハに光Lを照射する工程と、被エッチング層Eの上面及び被エッチング部E’の表面からの反射光L0による周期変動する干渉光L1を検出する工程と、干渉光強度から近似式(6)の定数Idc、Ipp、γを決定する近似式定数決定工程と、定数Idc、Ipp、γの決定した近似式(6)と干渉光強度の極値I1、I2、I3とに基づきエッチング深さδ(t)を算出するエッチング深さ算出工程とを備えている。
(もっと読む)
タイヤ表面の評価方法
本発明は、タイヤ(P)の表面の外観を評価する装置であって、リニアカラーカメラ(1)を有し、カメラ(1)が、タイヤ(P)の表面により反射されてカメラ(1)に入った光ビーム(F)を所与の波長の少なくとも2つの基本色(R,G,B)に分離し、基本色の各々についてグレーレベルの基本的画像(41,42,43)を得ることができる等しい数のセンサ(11,12,13)に光ビームを差し向けるようにする手段(14,15,16)と、基本色と同数の照明手段(21,22,23)とを有し、照明手段は、互いに異なる角度で評価されるべき表面を照明するよう差し向けられ、照明手段(21,22,23)の各々は、その他の照明手段の光とは異なる光(R,G,B)を発生させ、この光の波長は、カメラにより選択された基本色のうちの1つの波長に実質的に一致していることを特徴とする装置に関する。 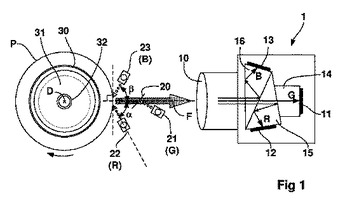 (もっと読む)
(もっと読む)
立体形状測定装置
【課題】本発明は、立体形状を有する測定物に対する最高点の測定光と同一の基準光及び最低点の測定光と同一の基準光をそれぞれ生成する反射距離調節手段を備えており、測定物の最低点と最高点に対する干渉縞を同時に獲得できるようにする立体形状測定装置に関するものである。
【解決手段】本発明の立体形状測定装置は、光源と、前記光源からの照明光を分割するビーム分割器と、前記ビーム分割器からの照明光が照射され、最高点と最低点の段差を有する測定物と、前記ビーム分割器からの照明光が照射される基準ミラーと、前記測定物の表面からの測定光と前記基準ミラーで反射される基準光が合わせられて生成される干渉縞を検出する光検出素子と、前記光検出素子を通して検出された画像を処理する制御コンピュータとを含む立体形状測定装置において、前記ビーム分割器と前記基準ミラーとの間には、前記ビーム分割器からの光の経路を変換し、補助基準光を生成する補助基準光生成手段が備えられる。
(もっと読む)
車両タイヤの圧力とプロファイル深さを決定する方法
車両に搭載される空気タイヤの圧力とプロファイル深さを決定する方法であって、
車両が1組のロードセンサ配列上を通過する際に、該センサと接触状態にある該車両タイヤによって発生する力の分布の2次元パターンについての力の信号を供給する前記ロードセンサ配列によって上記の圧力を測定し、しかも該タイヤ圧力は、タイヤおよび車両の製造又は型に関係なく、力の分布に基づいて決定される方法において、
該タイヤのプロファイル深さが、前記圧力の決定前、決定中、あるいは決定後に決定されることを特徴とする方法。
(もっと読む)
深さ測定装置
【課題】高アスペクト比の凹部の深さを高精度に測定できる深さ測定装置及び深さ測定方法を提供する。
【解決手段】照明光源(1)から発生した照明ビームをリング状光ビーム生成装置(5,6)によりリング状光ビームに変換する。リング状光ビームは、対物レンズ(14)により、ベッセルビームに変換され、試料(15)に向けて照射される。試料に形成された凹部底面からの反射光は、結像レンズ(21)及びピンホール(22)を介して光検出装置(23)により受光される。試料を光軸方向に移動させながら試料の凹部からの反射光強度を検出し、反射光強度が最大となる光軸方向の位置を検出する。そして、凹部近傍の試料表面についても同様に、試料を光軸方向に移動させながら反射光強度を検出し、反射光強度が最大となる光軸方向の位置を検出する。これら検出された光軸方向の2 つの位置より、凹部の深さを決定する。
(もっと読む)
領域ベースのフィルタリングを使用する奥行マップ抽出のためのシステムおよび方法
アーティファクトを低減するために、領域ベースのフィルタリングを用いて少なくとも2つのイメージから奥行情報を抽出するシステムおよび方法を提供する。本開示は、走査線動的プログラミング(DP)または他の同様の方法によって生成されるアーティファクトを低減するために、事後処理アルゴリズムまたは機能を提供する。該システムおよび方法は、あるシーンから第1のイメージおよび第2のイメージを取得すること(202)と、第1のイメージ内の少なくとも1つの点と第2のイメージ内の対応する少なくとも1つの点との視差を推定して、視差マップを生成すること(204)と、第1のイメージと第2のイメージの少なくとも一方を少なくとも1つの領域にセグメント化すること(208)と、該セグメント化された領域に基づいて視差マップをフィルタリングすること(210)を提供する。さらに、水平方向よりも垂直方向に大きな平滑化効果を有する異方性フィルタを用いることにより、奥行境界を実質的に不鮮明にすることなく縞状アーティファクトを低減する。  (もっと読む)
(もっと読む)
外観検査装置
【課題】傷の発見や傷の凹凸の判別を容易に行うことができる外観検査装置を提供する。
【解決手段】複数の光源を有し、複数の光源を一つずつ順番に点灯させて、その度ごとに被検査物の画像を撮影する。また、被検査物表面の傷部分の周囲において、被検査物への光源からの光の入射方向と反対方向に傷部分の影が生じているか否かを検知、判定することにより、傷部分が表面から出っ張った傷なのか、引っ込んだ傷なのかを判断することができる。更に、撮影された複数の画像について排他的論理和の演算処理を行うことにより、傷部分を強調して表示させることが可能となる。
(もっと読む)
周期構造測定方法及びその方法を用いた周期構造測定装置
【課題】ベース部の表面または界面が一様に傾いている場合でも、周期構造の測定を可能にする。
【解決手段】ベース部上の周期構造体10の表面に、構造体10の周期のオーダーの波長の光を入射し、前記周期構造体10からの反射光強度の波長依存性である反射スペクトルの測定値を測定し、前記周期構造部の深さ(d)、デューティ比(f)、および前記ベース部の厚さ分布(Dmax、Dmin)を仮定して反射スペクトルの計算値を算出し、前記反射スペクトルの測定値と前記反射スペクトルの計算値との差分の二乗和を算出し、該算出した差分の二乗和が予め定められた許容範囲内になったときの前記反射スペクトルの計算値を算出する際に仮定した前記周期構造部の深さ(d)、デューティ比(f)、および前記ベース部の厚さ分布(Dmax、Dmin)を出力する。
(もっと読む)
汚泥容量測定装置
【課題】発光源からの光を効率的かつ均一に計測管へ照射し、光検出器によって透過光を検出するために十分な光を得ることができる汚泥容量測定装置を実現することを目的とする。
【解決手段】側面と底面で構成された計測槽1の側面外側の一方に光源2からの光を発光させる発光部5を、他方に光センサー8を備え、計測槽1は発光部5の光を光センサー8へと透過する部分を有し、計測槽1に汚泥混合液を一定液位まで導入し、所定時間経過後に、発光部5から計測槽1を透過し光センサー8へと到達する光を光センサー8で検出し、光センサー8で検出する光の検出量から、汚泥混合液の汚泥容量を測定する装置であって、光源2からの光を第1の集光手段3で集め、導光手段4で発光部5へと導くようにした。
(もっと読む)
分散型の取得および処理を用いるリアルタイム型スペクトル領域光コヒーレンストモグラフィ
【解決手段】本発明はリアルタイムフレームレートでOCT画像を取得し、処理し、表示する分散コンピューティングシステムに関係する。 (もっと読む)
モアレ縞発生器を適用した位相遷移映写式3次元形状測定装置及びその方法
【課題】モアレ縞発生器を適用した位相遷移映写式3次元形状測定装置及びその方法を提供する。
【解決手段】この装置は、光源(111)及びLED光源(121)の光をそれぞれ用いて格子イメージを生成し、補正面位相と測定対象物(240)の物体位相を獲得できるようにする第1及び第2投影格子(114,124)と、第1及び第2投影格子(114,124)で生成された格子イメージがそれぞれ透過されるようにし、測定対象物(240)の高さ算出のための格子イメージを得るようにする第1及び第2投影部(116,126)と、測定対象物(240)から反射される格子イメージを受光して映像を獲得する映像獲得部(300)と、映像獲得部(300)で獲得された映像に対してアンラッピングされた物体の高さを算出する中央制御部(500)と、を含む。
(もっと読む)
刻印検査装置
【課題】測定時間を短縮することができ、V字溝やU字溝状で形成された刻印文字の深さ計測を可能とするとともに、鏡面反射する刻印面であっても測定精度への影響が少ない刻印検査装置を提供する。
【解決手段】レーザスリット光源41〜45を走査ユニット71の移動ステージ72に支持し、Y方向73へ移動可能とする。各レーザスリット光源41〜45からのスリット光31の照射位置を、対応したCCDカメラ81〜85で斜め上方から撮像する。刻印面2で正反射するスリット光31の正反射光91が対応するCCDカメラ81〜85に直接入力されないようにレーザスリット光源41〜45とCCDカメラ81〜85との関係を設定する。各CCDカメラ81〜85で取得した画像を制御装置101で解析する。
(もっと読む)
低コヒーレンス干渉法(LCI)のための装置、システムおよび方法
本明細書に記載される実施形態は、対象サンプルに関する構造的情報および深さ情報の取得を可能にする低コヒーレンス干渉法(LCI)技術を伴う。一実施形態において、「掃引源」(SS)光源は、サンプルに関する構造的情報および深さ情報を取得するために、LCIにおいて用いられる。掃引源光源は、参照信号と、サンプルに向けられる信号を生成するために用いられることができる。サンプルから散乱される光は、結果として戻され、参照信号と混合されて、干渉を実現し、したがって、サンプルに関する構造的情報を提供する。サンプルに関する深さ情報は、フーリエ領域概念のほか、時間領域技術を用いて取得されることができる。掃引源光源を利用する複数のLCI実施形態が、本明細書に開示される。本明細書に開示される別の実施形態において、a/LCIシステムおよび方法は、時間領域システムに基づいて提供され、広帯域の光源を利用する。  (もっと読む)
(もっと読む)
段差表面形状の計測方法および計測装置
【課題】 本発明は、低コヒーレンス干渉法の原理を利用して長レンジの高さを持つ対象を測定する方法を提供する。
【解決手段】
サブミクロンから数百ミクロンの長レンジの高さを持つ対象のナノメートルオーダの表面形状を高精度に測定する方法に関し、光源波長により決まるナイキスト間隔以上の標本点間隔で干渉像データを撮像し、得られたデータから標本点間隔内の干渉像データを内挿した結果からインターフェログラムのピーク位置を求めて対象高さを算出することを特徴とする段差表面形状の計測方法。
(もっと読む)
光学式変位計
【課題】 ラインセンサからの受光量の出力時間を短縮化させ、応答性を向上させた光学式変位計を提供することを目的とする。
【解決手段】 同一の半導体基板上に奇数素子20a及び偶数素子20bが交互に配置されたラインセンサ20と、奇数素子20aの受光量が入力され、当該受光量を順に出力する第1シリアル出力部21aと、偶数素子20bの受光量が入力され、当該受光量を順に出力する第2シリアル出力部20bとを備え、奇数素子20a及び偶数素子20bのいずれか一方から出力される同時に露光して求められた受光量に基づいて、上記ラインセンサの投受光条件を求めるフィードバック制御を繰り返し、受光量調整のための時間を短縮化させる。
(もっと読む)
サポートベクトルマシンを用いて制御ツールを制御する方法
【課題】サポートベクトルマシンを用いて製造ツールを制御する方法を提供する。
【解決手段】構造の幾何学形状を特徴付けるプロファイルパラメータによって定められる構造の形状モデルが取得される。プロファイルパラメータの値の組が取得され、これを用いて、構造から回折される光の挙動を各々が特徴付けるシミュレート回折信号の組が生成される。入力としてシミュレート回折信号の組を、予期される出力としてプロファイルパラメータの値の組を用いて、サポートベクトルマシンが訓練された後、ウェハ上に構造を製造するように製造プロセスが実行される。構造からの測定回折信号が取得され、訓練済みサポートベクトルマシンに入力される。訓練済みサポートベクトルマシンの出力として、構造のプロファイルパラメータの値が取得される。このプロファイルパラメータの値に基づいて、1つ以上のプロセスパラメータ又は製造ツールの装置設定が調整される。
(もっと読む)
高さ測定装置
【課題】
光学系中に設置した被検体測定面の高さ方向の差を検出し測定する。
【解決手段】
レーザ光源1からの光をコリメータレンズ2で平行光束としポリゴンミラー3に向かわせる。ポリゴンミラー3で反射した光束をfθレンズ4で被検体5の測定面6に集光すると共に、ポリゴンミラー3反射面を入射瞳として光センサ7に集光し、集光位置の変化で被検体測定面の高さ方向の差を検出する。被検体5と光センサ7間には被検体5測定面6の走査方向が稜線方向となるようにしたシリンドリカルレンズ8を設置し、被検体5測定面6の走査方向と直角方向が受光面長手方向となるようにして設置した前記光センサ7に光束を向かわせ集光する。光センサ7の検出結果は制御部9を経て表示部10に表示する。
(もっと読む)
121 - 140 / 264
[ Back to top ]