
Fターム[2F065CC14]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 建築物 (337)
Fターム[2F065CC14]に分類される特許
201 - 220 / 337
コンクリート構造物の自主管理支援システム、自主管理支援サーバ及び自主管理支援プログラム
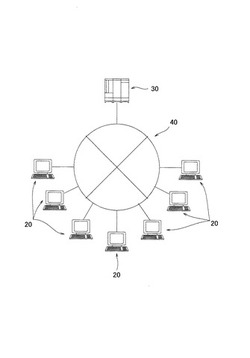
【課題】コンクリート構造物の自主管理を容易にする。
【解決手段】管理者端末20、自主管理支援サーバ30及びネットワーク40からなるコンクリート構造物の自主管理支援システムであって、管理者端末20は、コンクリート構造物のひび割れ幅を光学的な測定により定量化する携帯型のひび割れ幅測定装置を用いて管理者が定期的に測定したコンクリート構造物のひび割れ幅データを自主管理支援サーバ30に対して送信し、自主管理支援サーバ30は、管理者端末20から送信されたひび割れ幅データを受信すると共に、受信したひび割れ幅データを時系列に記憶し、さらに、定期的に測定されたひび割れ幅データの経時変化に基づいて、コンクリート構造物の劣化度を判定すると共に、劣化度判定結果を管理者端末20に対して送信する。
(もっと読む)
組立て部材の形状評価方法及び組立て後における組立て部材の形状評価方法

【課題】より高い精度にて組立て部材の形状を保証することによって仮組立て作業を行わずに高い組立て精度を得る。
【解決手段】複数の組立て部材を組立てることによって橋梁あるいは該橋梁を構成する所定構造物を組立てる場合における上記組立て部材の形状評価方法であって、上記組立て部材の三次元座標値のうち、少なくとも上記組立て部材が含む所定の曲線部の三次元座標値を連続的に取得する座標値取得工程と、該座標値取得工程にて取得した上記三次元座標値と予め設定された上記組立て部材の形状データとを比較して評価する工程とを有する。
(もっと読む)
リング共振器とブラッググレーティングを用いた光波長検波型物理量計測センサ
【課題】光ファイバ分布計測システムにおいて従来の分布計測システムの使用する波長帯域幅以下の波長帯域幅で接続可能なセンサ数を増加させ、かつセンサとしての応答速度を向上させる。
【解決手段】リング共振器と光ファイバブラッググレーティングあるいは導波路にブラッググレーティングを描画した導波路ブラッググレーティングを組み合わせてセンサとする。これにより従来、センサとして使用されていた光ファイバブラッググレーティングの反射帯域幅より遥かに狭いピコメータオーダの単一のスペクトルを得ることができ僅かな波長シフトでも帯域通過型の例えばファブリペロー干渉計を用いた波長検波器でSN良く波長を検出できる。
(もっと読む)
面歪の測定装置及び方法
【課題】鏡面乃至半鏡面状の測定対象表面上の、観察可能なあらゆる点での面歪分布を、定量的に、また高速・高精度に測定および評価できる、面歪の測定装置及び方法を提供することを課題とする。
【解決手段】複数種の明暗パタン5を切替えて表示することが可能なパタン表示手段2と
、鏡面乃至半鏡面状の測定対象1表面上に写る、前記パタン表示手段に表示された複数の
明暗パタンの鏡像を、撮影する撮影手段3と、撮影された、複数の明暗パタンの鏡像画像
を画像処理して、測定対象表面の面歪分布の演算、面歪の定量評価するパソコン10とを備える。
(もっと読む)
芯出治具、計測システム、及び計測方法
【課題】本発明の目的は、灰溶融炉の炉室壁の現実の損耗量を光学的計測技術を利用して求めるための芯出治具、計測システム、計測方法を提供することである。
【解決手段】芯出治具(20)は、灰溶融炉(1)の外殻構造(2)に対して位置決めされる基部(21)と、前記灰溶融炉の炉室(3)に配置されるように前記基部に支持される基準物体(25)とを具備している。したがって、外殻構造(2)に対して位置決めされて炉室(3)に配置される基準物体(25)を基準として、炉室壁(4、5、6)の現実の損耗量を光学的計測技術を利用して求めることが可能となる。
(もっと読む)
長大構造物の光学的変状計測装置
【課題】橋梁等の長大構造物を起重機船により吊運搬し架設する工事では、吊込、運搬、架設の各作業時に長大構造物の変状を十分に把握して起重機船の操船およびクレーン操作する必要がある。このため十分な経験と測量技術を持つ監視員を陸上に配置して長大構造物の変状を測量し、その結果を起重機船側へ無線連絡で行っているが、起重機船側では即時に総合判断ができないことや連絡遅れがあると操船およびクレーンの調整操作を誤るおそれがある。
【解決手段】橋梁等の長大構造物を起重機船により吊運搬し架設する際に、長大構造物上に光学的変状計測装置を配置して長大構造物全体のたわみ及びねじれを計測し、計測データを無線式データ伝送機により起重機船側に伝送し、起重機船側では、受信した長大構造物の変状データを情報処理装置により演算処理し表示装置に表示することにより、長大構造物の変位状態をリアルタイムに計測管理し、安全に架設工事が行えるようにした長大構造物の光学的変状計測装置。
(もっと読む)
移動プラットフォームの位置を特定するための装置および方法
【課題】 倉庫または小売店舗のフロアなどの画定されたスペース内を移動するショッピング・カートなどの移動プラットフォームに対して、場所特定の装置および方法の有効性を向上させること。
【解決手段】 ショッピング・カート、平台型カート、またはリフト・トラックなどの移動プラットフォームには、視野が遮蔽または制限され、センサとエミッタの作用からプラットフォームの位置を区別することができる回路と連携する複数の放射線検出器が提供される。位置は、場所および方向からなる。各検出器またはセンサは、その視野を球面体の画定部分に制限するために遮蔽される。
(もっと読む)
ケーブル敷設機
【課題】長距離のケーブルを簡単な施工で連続的に敷設することができる光ファイバ敷設機を提供する。
【解決手段】光ファイバや電線などのケーブル(光ファイバ2)を、接着剤3によって敷設対象物(計測対象構造物4)に敷設するためのケーブル敷設機1であって、敷設対象物へと送り出されるケーブルが挿通されるケーブル挿通路5を備えた筒状の胴部10を備え、胴部10に、ケーブル挿通路5の送出側端部に開口し敷設対象物へと送り出されるケーブルの少なくとも敷設対象物側部分に接着剤3を供給するための接着剤供給路6を形成した。
(もっと読む)
受動光ロケータ
【課題】 ターゲットに関連する絶対位置を示す情報を生成する受動光ロケータと、遠隔操作アクチュエータとを具備するシステムを提供する。
【解決手段】受動光ロケータ32は、ターゲット50までの距離を示す情報を生成する受動光レンジファインダ85と、当該受動光レンジファインダの光軸の方位角及び仰角を示す情報を生成する少なくとも1つのセンサ60とを備える。受動光ロケータは、当該受動光ロケータに関連する地理的位置を示す情報と、ターゲットまでの距離を示す情報と、光軸の方位角及び仰角を示す情報とを使用して、ターゲットに関連する絶対位置を示す情報を決定する。遠隔操作アクチュエータ200は、受動光ロケータに機械的に結合され、当該システムにおいて受け取られる1つ又は複数の動作命令に従って受動光ロケータの光軸を遠隔に位置決めする。
(もっと読む)
平面抽出方法、その装置、そのプログラム、その記録媒体及び撮像装置
【課題】 ノイズに対してロバストであり、信頼性が高い平面を抽出することができる平面抽出方法、その装置、そのプログラム、その記録媒体及び撮像装置を提供する。
【解決手段】 距離画像等の3次元データから平面を抽出するには、先ず、3次元データ群からそれぞれの3次元データに対応する信頼度パラメータを算出し、信頼度パラメータに基づいて3次元データを選別し、選別された3次元データからランダムに1つの基準点と、この基準点から所定の距離内でランダムに他の2点をサンプリングし、3次元データによって決まる1つの平面を示す平面パラメータを複数算出し、得られた複数の平面パラメータを投票空間に投票してこの投票結果に基づき平面を決定する。
(もっと読む)
画像処理装置及びその処理方法
【課題】時系列的に変化する撮影画像から、撮影装置の撮影位置、姿勢又は対象物の座標を精度良く計測できる画像処理装置を提供する。
【解決手段】時系列的に撮影した一連の撮影画像を取得し、撮影画像から特徴点を抽出し、特徴点を追跡して相互に対応付け、相互に対応付けられた一連の撮影画像からステレオ画像を選択し、標定および三次元計測を行ない、三次元計測により求められた対応点の誤差範囲を算出し、算出された誤差範囲に基づいて、対応点の三次元計測への適否を判定し、不適切と判定された対応点を削除し、削除された対応点を除いて再度標定および三次元計測を行なうことにより、計測精度を向上できる。
(もっと読む)
損傷度合測定装置および損傷度合測定方法
【課題】被測定材を破壊することなく、その表面の損傷度合を客観的に測定することができる損傷度合測定装置および損傷度合測定方法を提供すること。
【解決手段】建築用シーリング材1の表面の対象範囲Rにおける損傷度合を測定するための装置であって、対象範囲Rに生じたひび割れ2の深さの平均値(a)、幅の平均値(b)および総面積値(S)を予め格納された式(1)に代入する結果、ひび割れ2により応力が解放された部分の体積(Ve)を算出することにより、建築用シーリング材1の表面の損傷度合を測定するものである。
式(1) Ve=(πa2/2)S/b
この式(1)において、Veは、対象範囲Rにおけるひび割れ2により応力が解放された部分の体積、aは、対象範囲Rにおけるひび割れ2の深さの平均値、bは、対象範囲Rにおけるひび割れ2の深さの平均値、Sは、対象範囲Rにおけるひび割れ2の総面積値である。
(もっと読む)
非接触式振動・変位計測装置
【課題】計測対象物が遠隔であっても容易且つ確実に計測対象物の振動を計測可能な非接触式振動・変位計測装置を提供する。
【解決手段】非接触式振動・変位計測装置Mは、計測対象領域に対して照準を定めるレンズ部11と、計測対象領域にレーザ光を照射する照射部12と、レーザ光の反射光を受光する受光部13と、を備える光学系15と、光学系15を駆動する駆動部20と、レンズ部11によって計測対象領域に照準が定められた時の駆動部20の制御情報を記憶する記憶部25と、駆動部20の制御情報に基づいて照射部12から照射されるレーザ光の照準を定める照準位置規定部と、照準位置規定部により定められた照準にレーザ光を照射し、計測対象領域の振動又は変位によって生じる反射光の出力の変化を検出する検出部と、反射光の出力の変化に基づいて計測対象領域の変位状態又は振動状態を解析する振動解析部30と、を具備する。
(もっと読む)
光ファイバセンサ及び光ファイバセンサ付き遮水シート
【課題】構造が簡易で、かつ良好に組付可能な光ファイバセンサ及び光ファイバセンサ付き遮水シートを提供する。
【解決手段】帯状体25に1m間隔で固定された第1、第2余長光ファイバ16b,16cのたるみ部分に仮止め32を施した。これにより、組付けなどの作業性の向上を図ることができる。帯状体25及び保護カバー間に潤滑剤を介在した。これにより、重量物の荷重を受けても、たるみ部分は容易に変位し、確実にひずみ計測を行うことができる。
(もっと読む)
マーキング装置およびマーキング方法
【課題】 所定の設置物を据え付ける据付面に効率よく据付位置をマーキングすること。
【解決手段】 据付面16に当接して据付面16に印を付けるスタンプ56と、スタンプ56の軸線と一致する光軸を有し、据付面16上にスタンプ56の現在位置を投影するポイントレーザ52と、スタンプ56をポイントレーザ52とともに移動させることによって、据付面16上に投影されるスタンプ56の現在位置を変更するXYアーム44と、据付面16を撮影するカメラ60と、カメラ60の撮影画像における据付位置とスタンプ56の現在位置との差分を求めるとともに、該差分に対応する距離だけXYアーム44によりスタンプ56をポイントレーザ52とともに移動させ、撮影画像における据付位置とスタンプ56の現在位置とが一致した状態でスタンプ56により据付面16上の据付位置Pに印を付ける制御を行う制御装置26を備えた。
(もっと読む)
エレベータ寸法測定装置
【課題】かごが軸線に直交した方向にずれた寸法を測定するエレベータ寸法測定装置を得る。
【解決手段】かご10の第1の基準点に設けられ昇降路14の軸線方向にレーザー光4aを送出し昇降路14の天面から反射されたレーザー光4aを受け昇降路14の軸線上の第1の基準点の位置を測定する軸線方向位置測定部4と、かご10の第2の基準点に設けられ軸線に対して直交した方向にレーザー光5a、6aを送出し昇降路14の内壁から反射されたレーザー光5a、6aを受け第2の基準点から内壁までの寸法を測定する奥行方向寸法測定部5および間口方向寸法測定部6と、昇降路14内に設けられ鉛直方向にレーザー光2aを送出する鉛直スポットレーザー光装置2と、かご10に設けられレーザー光2aを受けた鉛直点の位置を測定する位置検出部7と、鉛直点と第2の基準点との距離を算出するパソコン3とを備えている。
(もっと読む)
転炉炉体の熱変形量測定方法
【課題】炉体内に溶鋼が入っているときでも炉体の熱変形量を正確に測定することのできる転炉炉体の熱変形量測定方法を提供する。
【解決手段】炉体1の外周に設けられたトラニオンリング2にレーザー距離計6を設け、このレーザー距離計6から炉体1の外表面にレーザー光線を照射して炉体1の熱変形量を測定するようにした。
(もっと読む)
構造物異常判別システム及び構造物異常判別方法ならびにプログラム
【課題】観測画像と変位計データを組み合わせて使用することで、構造物異常の原因種別を詳細に判別可能な構造物異常判別システム及び構造物異常判別方法ならびにプログラムを提供する。
【解決手段】構造物異常判別装置2bは、監視カメラ4の入力画像データから、当該時刻の背景画像データを作成し、構造物異常判別装置2b内部の背景画像蓄積部に記憶している。背景画像蓄積部に記憶された当該時間の背景画像と直近過去の背景画像との差分から、監視カメラ4の変位、構造物の変位を判定する。また、装置内部の画像処理部での判定結果と変位計1の計測値とから、監視カメラ4の変位、構造物の変位、システム異常を判定する。
(もっと読む)
物体認識システム及びそれを用いた物体の変位計測方法
【課題】煩雑な視準作業を行うことなく、個人的要因による誤差が介入しない物体認識システム及びそれを用いた物体の変位計測方法を提供すること。
【解決手段】物体認識システムは、計測対象事物の所定部位に設置される目標物100;目標物100と離隔された地点に設置され、目標物100を昼間及び夜間にかかわらず持続的に撮影し、撮影されたアナログ映像をデジタルデータに変換して処理し、その結果データを遠隔地の外部機器へ転送するカメラ装置120、及びカメラ装置120と電気的に接続され、カメラ装置120を遠隔制御し、カメラ装置120から送信されたデータを分析プログラムによって分析及び処理し、処理結果をインターネットウェブサーバーに保存してシステム運用に活用できるようにするメインサーバーコンピューター130を備えている。
(もっと読む)
車両周辺監視装置
【課題】対象物の種別を高い信頼性で区別して判定することができる車両周辺監視装置、特に、対象物の中から歩行者と歩行者以外の対象物とを高い信頼性で区別して判定することができる車両周辺監視装置を提供する。
【解決手段】車両に搭載された撮像手段によって得られる画像から、車両の周辺に存在する物体を検出する車両周辺監視装置であって、前記画像から対象物を抽出する対象物抽出手段と、前記対象物抽出手段により抽出された対象物に対して、該対象物の上下方向に間隔を有する複数の高さ位置での該対象物の幅を算出する幅算出手段(STEP101〜104)と、前記幅算出手段により算出された幅に基づいて、前記対象物の種別を判定する対象物種別判定手段(STEP105)とを備える。
(もっと読む)
201 - 220 / 337
[ Back to top ]