
Fターム[2F065CC40]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 路面;トンネル内面 (196)
Fターム[2F065CC40]に分類される特許
1 - 20 / 196
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
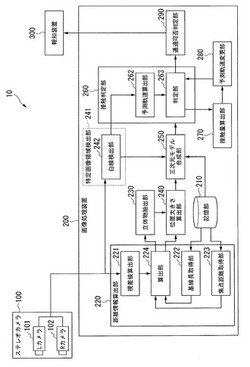
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法

【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
ひび割れ検出方法及び検出装置
【課題】スペックルパターンの明暗模様の時間変化の測定に基づくひび割れの検出方法において、その検出感度を向上する。
【解決手段】検査対象物Mの表面で反射されて位相変調された信号光2と、この検査対象物Mの表面で位相変調されていない参照光3との干渉によってフォトリフラクティブ結晶4中に生じたダイナミックホログラムで参照光3を回折し、この回折した参照光3を複数の検出チャンネル5を備えたマルチチャンネル検出器6で受光する。複数の検出チャンネル5のうち受光強度が最も高い受光強度を検出した検出チャンネル5から、予め決めた順番に相当する受光強度を検出した検出チャンネル5をディスクリミネータ7で弁別し、この弁別された検出チャンネル5の受光強度をマルチプレクサ8で積分してノイズを除去する。このノイズ除去によって位相変調を明確にとらえることができ、深いひび割れを高感度に検出できる。
(もっと読む)
路面分析
【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
構造物内空変位計測方法及びその装置
【課題】トンネルをはじめとした構造物の内空変位を計測し、該構造物の変状を監視する技術を提供すること。とくに工事中のトンネルや地下鉱山のトンネルのように粉塵が浮遊している空間に対しても、広範囲にわたって内空変位を計測しモニタリングできる方法を提供すること。
【解決手段】計測対象となる構造物の内側に内空変位センサである梁の一端を固定し、当該梁の表面にひずみ計測が可能な装置を設置し、当該装置により計測されたひずみから、当該構造物の鉛直方向および水平方向の変位を算出する構造物内空変位計測方法
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ
【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
運転支援装置
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
1 - 20 / 196
[ Back to top ]