
Fターム[2F065DD03]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 分解能向上 (726)
Fターム[2F065DD03]に分類される特許
201 - 220 / 726
物体の改善されたステレオ画像を得る方法およびシステム
注目の物体のステレオ画像に関する改善された深さ精度を得る方法であって、
第1の位置から注目の物体の第1の画像を撮像すること、
第1の位置とは異なる第2の位置から注目の物体の第2の画像を撮像することを含み、
第1の画像および第2の画像に基づいて、注目の物体に関する深さの概略推定を求めること、
深さの概略推定に基づいて、注目の物体に関する改善された深さ精度に対応する改善された撮像位置のセットを求めること、
改善された撮像位置のセットから改善された画像を撮像すること、
改善された画像に基づいて改善された深さを求めること
を含む方法を開示する。
関連するシステムも説明している。  (もっと読む)
(もっと読む)
回転・傾斜計測装置および方法
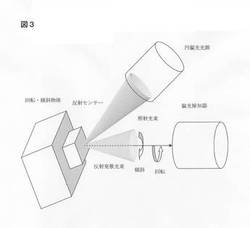
【課題】物体に簡便で小型な反射センサーを取り付け、回転・傾斜を精密にリモート計測する方法を提供する。
【解決手段】リモート観測方向に設置固定された偏光検知器と、物体に取り付ける反射センサーと、該反射センサーに円偏光を照射する光源装置から成り、且つ、該円偏光の照射角度範囲の設定によって、該反射センサーで所定の範囲の入射角度分布で正反射せしめ、その正反射せしめることで、該正反射光束を偏光反射の既知の入射角依存性に従う所定の空間分布の発散する楕円偏光光束を成さしめ、その楕円偏光光束を検出して、リモート観測方向へ向かう光線成分の偏光楕円から該反射センサーのリモート観測光軸周りの回転角θと観測光軸と成す傾斜角φを計測する。
(もっと読む)
試験対象物の幾何学的特性を測定する方法及び装置、並びに光プロファイリング・システム

【課題】試験対象物の第1及び第2表面を干渉法によってプロファイルすることに加えて、第1基準面と第2基準面との間の空間的関係に基づき、試験対象物の幾何学的特性を測定する。
【解決手段】本発明は、試験対象物の幾何学的特性を測定するための方法を特徴とする。この方法は、第1基準面に対して、試験対象物の第1表面を干渉法によってプロファイルする工程と、第1基準面とは異なる第2基準面に対して、試験対象物の第2表面を干渉法によってプロファイルする工程と、第1基準面と第2基準面との間の空間的関係を提供する工程と、干渉法によってプロファイルした表面、並びに第1基準面と第2基準面との間の空間的関係に基づいて、試験対象物の幾何学的特性を計算する工程とを含む。ある実施形態では、この空間的関係は、校正済みのゲージ・ブロックを使用することによって、または変位測定干渉計を使用することによって測定することができる。対応するシステムも説明される。
(もっと読む)
押力検出装置および楽器
【課題】本発明は、演奏者が演奏する楽器において、操作による操作感を与えながら演奏操作子の操作状態の検出を行うことで、演奏者の得られる操作感と発音内容とのずれによる違和感を低減することを目的とする。
【解決手段】楽器10は、加えられる押力によって変形する変形部材30と光を出射する光源21と光を検出する光検出素子41とを備える。変形部材30は、第1の方向に沿って配置される光ファイバ31aと第1の方向とは異なる第2の方向に沿って配置される光ファイバ31bとを内部に有する。光ファイバ31は、変形部材30が変形するのに伴って変形する。楽器10は、光源21が出射し、変形した光ファイバ31が伝達する光が光検出素子41に到達する際に発生する遅れ時間を測定し、この値と光ファイバ31の位置に関する情報とに基づいて、部材変形量および加力位置を検出する。
(もっと読む)
ステージ装置、露光装置、駆動方法及び露光方法並びにデバイス製造方法
駆動系により、アーム部材(71)から移動体(WFS)のXY平面に平行な一面に配置されたグレーティング(RG)に対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材(71)の形状変化を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。駆動系は、第1計測系の計測結果に含まれるアーム部材の形状変化に起因する計測誤差を、第2計測系の計測結果を用いて補正する。 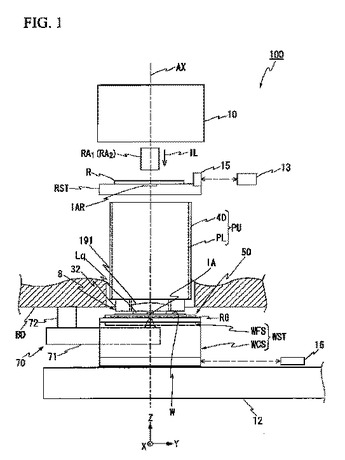 (もっと読む)
(もっと読む)
位置検出機能付き表示装置
【課題】少ない数の光検出器や位置検出用光源によって、検出領域内の対象物体の位置を検出することのできる位置検出機能付き表示装置を提供すること。
【解決手段】位置検出機能付き表示装置100において、表示パネル8は、画像表示領域20Rに、複数の表示用発光素子6を備えている。また、画像表示領域20Rには、検出領域10Rに位置検出光L2を出射する複数の位置検出用光源12が配置されている。従って、複数の位置検出用光源12の発光バランスを調整すれば、検出領域10Rに位置検出光L2の強度分布を形成することができる。従って、検出領域10R内の対象物体Obで反射した位置検出光L2を光検出器30によって検出すると、その検出結果に基づいて、対象物体Obの位置を検出することができる。
(もっと読む)
滑車アライメントシステム
【構成】滑車アライメント装置は取り付け面を有する細長い本体、前記取り付け面から外側に延設され、それぞれが先端を有する2つの細長い脚部、前記本体によって支持され、平面ビームを照射するように構成されたレーザー素子、前記レーザー素子に電力を供給する電源、前記本体と滑車との接触を検出するスイッチであって、前記接触が検出されたときに前記レーザー素子を前記電源に電気的に結合する通常は開放しているスイッチ、および前記取り付け面に近接して前記本体によって支持された磁石からなる。 (もっと読む)
閉塞孔を検出するための表面分析、および装置
非コーティング構成要素、および孔を備えたコーティング済構成要素に対してレーザ三角測量を実施することによって、コーティング後に再度開口すべき孔の正確な位置を検出することができる。  (もっと読む)
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
人体向き推定装置及び人体向き推定方法
【課題】プライバシーを侵害することなく、広範囲で人体の向きを推定可能な人体向き推定技術を提供する。
【解決手段】検出位置取得部61は、距離センサ50で複数の検出位置が検出される都度、当該複数の検出位置を取得する。位置推定部62は、検出位置取得部61が複数の検出位置を取得する都度、当該複数の検出位置の重心を算出することにより、人体の位置を推定する。方向推定部63は、位置推定部62が都度算出した重心のうち、その位置が近いものを同一の人体として推定して、同一の人体に関する重心の変化をトラッキングして、人体の移動方向を人体の向きとして推定する。
(もっと読む)
原位置における極薄の光学膜の厚さデータ決定のための方法およびシステム
薄膜の厚さに関するデータ(例えば、厚さ変化)は、以下の通りに本願明細書において決定される。前記膜および基板が、全体において、干渉計構造を形成するように、前記膜は基板上に配置される。その光放射線が膜および基板によって形成される干渉計構造の方へ発されて、前記干渉計構造から光学的に反射された後、放射線は測定される。前記薄膜の厚さ関連のデータ(例えば、厚さ変化)は、その後、スペクトル関連の情報の中で、例えば、前記光学的に反射された放射線によって決定される。 (もっと読む)
二面の平行度を測定する方法及びそれに用いる反射部材
【課題】向かい合う二面の平行度あるいは角度を秒オーダの精度で安価、かつ簡易に測定できる二面の平行度を測定する方法とそれに用いる反射部材を提供する。
【解決手段】反射部材としてのビームスプリッタ71の第2面9を上部ミラー5に向け、第3面11を下部ミラー6に向けて配置し、第1面8に入射光ビーム24を入射し、該第1面8からの第1反射ビーム25と、該上部ミラー5で反射し該第1面8を透過して戻ってくる第2反射ビーム26との乖離度を測定する。次に、該第1面8を該下部ミラー6に接して配置し、該第2面9に垂直な方向から該入射光ビーム24を入射し、該第2面9から反射される第3反射ビームと、該入射光ビーム24が該第2面9を透過し、さらに該下部ミラー6で反射し該第2面9を透過して戻ってくる第4反射ビームとの乖離度を測定する。該二つの乖離度から、該上部ミラー5と該下部ミラー6との平行性を計算する。
(もっと読む)
フォトマスクの特性検出装置およびフォトマスクの特性検出方法
【課題】本発明は、フォトマスクの特性を検出することができるフォトマスクの特性検出装置およびフォトマスクの特性検出方法を提供する。
【解決手段】被検出体に形成されたパターンの光学像に基づいて検出データを作成する検出データ作成部と、前記パターンに関する参照データを作成する参照データ作成部と、特性の検出対象となるパターンに対応する参照パターンと、前記参照パターンの位置情報と、を前記参照データから抽出する抽出部と、前記参照パターンに基づいて特性を検出する領域を設定するとともに、前記位置情報に基づいて前記検出データから前記特性の検出対象となるパターンを抽出する第1の領域設定部と、前記特性を検出する領域における前記特性の検出対象となるパターンの特性を受光面上に結像された光学像を光電変換することで検出する検出部と、前記検出された特性を集計する集計部と、を備えたことを特徴とするフォトマスクの特性検出装置が提供される。
(もっと読む)
露光装置及びデバイス製造方法
【課題】ウエハを保持するステージを高精度で駆動する。
【解決手段】 微動ステージWFS1と微動ステージWFS1を支持する粗動ステージWCS1とにより囲まれる空間内に位置決めされる計測アーム71Aがエンコーダヘッドを有し、該ヘッドにより微動ステージWFS1に設けられたグレーティングRGに計測ビームを照射し、グレーティングRGからの戻りビームを受光する。ヘッドの出力に基づいて、微動ステージ位置計測系が微動ステージWFS1の位置情報を計測する。計測アーム位置計測系72A0が、計測アーム71Aの光軸AXに対する相対位置情報を計測する。従って、微動ステージ位置計測系と計測アーム位置計測系72A0との計測結果に基づいて、光軸AXを基準とする微動ステージWFS1の位置情報を高精度で計測する。
(もっと読む)
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 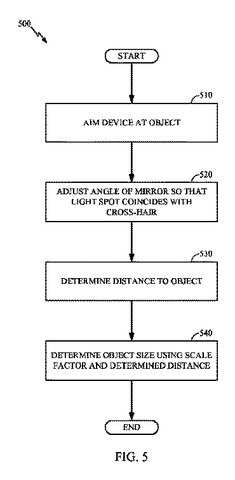 (もっと読む)
(もっと読む)
物体の自動認識方法及び物体の自動認識装置
【課題】処理が複雑になることなく、超音波を用いてあらゆる材質の物体の距離計測と形状認識とを正確に行うことが可能な物体の自動認識方法及び物体の自動認識装置を提供する。
【解決手段】特定の空間を撮像してイメージ画像を取得する画像取得工程と、イメージ画像に基づいて、そのイメージ画像に写る輪郭を囲んだ小領域にて分割された輪郭画像を作成する画像処理工程と、前記空間に超音波を送信する超音波送信工程と、前記超音波が反射して生成された反射波を受信する超音波受信工程と、前記反射波の受信信号を測定して、この受信信号の強度に基づいて、空間の物体の存在及び距離を表示する受信信号分布画像を作成する受信信号測定工程と、前記輪郭画像と受信信号分布画像とを重合わせる重合わせ工程と、前記重合わせにより、前記輪郭画像において、受信信号が重なる小領域を物体の輪郭であると特定する物体特定工程とを備えた。
(もっと読む)
表面検査装置および方法
【課題】高速の画像処理が可能で、エッジ付近の汚れや形状不良の影響を受けず、簡単な構成で、正確な表面検査を行うことができる、表面検査装置および方法を提供することを課題とする。
【解決手段】被検査面に光を照射する光源と、前記被検査面からの反射光を受光し撮像する、互いに視野がオーバラップするように前記被検査面の幅方向に配列された複数台のカメラと、該カメラからの撮像信号を1対1対応で処理する複数台の画像処理装置と、該画像処理装置からの疵情報を処理する計算機とを備え、前記被検査面に存在する表面疵を検出する表面検査装置であって、前記画像処理装置は、それぞれ独立に、かつ、同一の処理を行う、エッジ検出処理手段およびエッジ処理手段を備える。
(もっと読む)
周期構造物の非破壊検査方法
【課題】
周期構造物の構造を早くかつ正確に把握する方法を提供する。
【解決手段】
仮想周期構造物を設定して、前記設定された仮想周期構造物を多数の層に分けて、リープマン−シュウィンガー積分方程式をM次内挿法で離散化させて前記仮想周期構造物に対する反射率または透過率に対する物理量を計算する工程を含む、周期構造物分析方法に対するもので、M次内挿法を用いてより早い時間内により正確な非破壊検査ができる。
(もっと読む)
凹凸形状を抽出するための画像処理方法及び画像処理装置
【課題】縦振動を引き起こしている状況下でも、凹凸形状を精度高く読取ることができるようにする。
【解決手段】凹凸形状が施され且つ該凹凸形状の凹凸方向に沿った振動を起こしている刻印面から、凹凸形状を抽出するための画像処理方法であって、刻印面に対して一方向に走査することで、凹凸形状の高さデータを有する2次元形状データを取得する走査ステップと、高さデータの変化度合いを求めるために、2次元形状データを微分する微分ステップと、微分ステップの結果を基に、2次元形状データから高さデータの変化度合いが急峻なものを除去するスパイク除去ステップと、スパイク除去ステップの結果を積分して振動波形を推定する積分ステップと、2次元形状データから、積分ステップで推定した振動波形を減じることで凹凸形状に相当する刻印波形を算出する凹凸検出ステップとを有する。
(もっと読む)
パンタグラフ高さ測定装置
【課題】パンタグラフの高さ測定におけるキャリブレーションを簡易に行うことを可能としたパンタグラフ高さ測定装置を提供する。
【解決手段】車両の屋根上に設置されて車両のパンタグラフを撮影するラインセンサカメラ2と、ラインセンサカメラから入力される画像信号を時系列的に並べて入力画像を作成する入力画像作成部3a、テンプレートを予め登録するテンプレート設定部3b、パンタグラフの実際の位置を入力するパンタグラフ高さ入力部3c、入力画像に対して二値化処理を行う二値化処理部3d、及び入力画像上のマーカの位置を抽出するピクセル位置抽出部3eとを備えるキャリブレーション手段と、前述の対応関係を用いてラインセンサカメラ2によって撮影したパンタグラフの入力画像上の位置から実際のパンタグラフの高さを算出するパンタグラフ変位測定手段とからなる処理用コンピュータ3とを備える構成とした。
(もっと読む)
201 - 220 / 726
[ Back to top ]