
Fターム[2F065DD03]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 分解能向上 (726)
Fターム[2F065DD03]に分類される特許
141 - 160 / 726
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
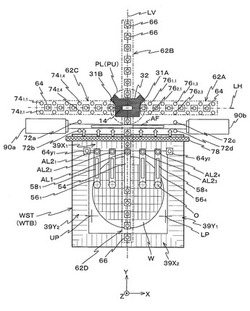
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
検査方法

【課題】 本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】 基板を検査するために、先に基板上に測定領域を設定し、測定領域に対する基準データ及び測定データを取得する。 続いて、測定領域に対して変換条件を設定し、基準データと測定データとの間の歪曲量に従う変換関係を取得する。次に、比較用特徴客体が変換関係を充足するか、比較用特徴客体を除いた特徴客体から選択された検証用特徴客体が変換関係を充足するか及び基板上に形成された検査対象パッドが変換関係を充足するかを検証する検証方法うち少なくとも一つの方法を用いて変換関係の有効性を検証する。続いて、変換関係が有効であると判断された場合変換条件を確定し、確定された変換条件に従って検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
基板検査方法
【課題】本発明は複数の投影部を通して測定対象物が形成された基板を検査する検査方法を提供する。
【解決手段】本発明の基板検査方法によると、複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得し、取得された投影部別位相データを用いて基板に対する投影部別高さデータを抽出する。複数の投影部のうち信頼度が最もよい投影部を基準投影部で設定し、基準投影部の高さデータを基準にして残り投影部の高さデータを整列させる。整列された高さデータを用いて統合高さデータを抽出する。このように、信頼度が最も高い投影部を基準として残りの投影部の高さを整列させることで、統合高さデータの信頼性を向上させることができる。
(もっと読む)
ブリッジ接続不良検出方法
【課題】部品のターミナルを短絡させるブリッジを検出することのできるブリッジ接続不良検出方法を提供する。
【解決手段】部品のターミナルの間を短絡させるブリッジ(bridge)を検出するためのブリッジ接続不良検出方法は部品が実装された基板に照射され反射された複数の光を通じて2Dイメージ及び高さ基準情報を獲得する段階と、2Dイメージ及び高さ基準情報のうち少なくとも一つ以上を用いて部品の回転情報を獲得する段階と、回転情報を用いて部品のブリッジ接続不良を検出するための検査領域を設定する段階と、2Dイメージを用いて検査領域内の第1ブリッジ領域を抽出する段階と、高さ基準情報を用いて検査領域内の第2ブリッジ領域を抽出する段階と、第1及び第2ブリッジ領域のうち少なくとも一つ以上を用いて部品のブリッジ接続不良可否を判断する段階と、を含む。
(もっと読む)
回折光学素子及び計測装置
【課題】均一で安定性の高い光スポットを発生させる回折光学素子を提供する。
【解決手段】複数の基本ユニットが2次元的に配列されている第1の回折素子と、複数の基本ユニットが2次元的に配列されている第2の回折素子と、を有し、入射する光に対して2次元的な回折光を発生させる回折光学素子であって、前記第1の回折素子において前記基本ユニットの配列方向を第1の方向とし、前記第2の回折素子において前記基本ユニットの配列方向を第2の方向とし、前記光が前記第1の回折素子、前記第2の回折素子の順に入射するとき、前記第1の回折素子で発生する回折光がさらに、前記第2の回折素子に入射して発生する0次光の最近接距離をΔxとし、前記第2の回折素子により発生する回折光及び迷光における最近接距離をαとした場合、前記第1の方向と前記第2の方向のなす角φが、−|φ1|<φ<|φ1|、かつ、φ≠0、sinφ1=−α/Δxであることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転駆動される被測定物1の回転軸1aにロータリエンコーダ2の回転軸3を取り付けるとともに、被測定物1の回転軸1aとロータリエンコーダ2の回転軸3との偏心を許容するように、ロータリエンコーダ2の回転軸3に直交する面内におけるエンコーダ本体2aの変位を一定の遊び範囲内に規制し、ロータリエンコーダ2のエンコーダ読取ヘッドの読み取ったコードに基づいてロータリエンコーダ2の回転軸3の回転角度を測定するとともに、非接触角度検出手段20によりロータリエンコーダ2の回転軸3の回転角度測定開始時点からのエンコーダ本体2aの変化した角度を検出し、ロータリエンコーダ2を用いて測定された回転角度を非接触角度検出手段20で検出されたエンコーダ本体2aの変化した角度に基づいて補正する。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単かつ小型な構成で、1mm以上の位置センシングが良好にでき、また高い分解能の検出が可能となるようにする。
【解決手段】発光素子9と受光素子10を有する反射型フォトセンサ7、移動方向に対し上り傾斜Ka及び下り傾斜Kbを有する形状が形成された反射板8を備え、上記受光素子10では、検出出力が反射板8の移動量に応じて直線的に変化するように、移動方向の中心部から両端へ向かう程、単位長さ当りの面積が広くなる受光領域を設け、上記反射板8をフォトセンサ7の発光/受光面SLに略平行で、かつ発光素子9と受光素子10を結ぶ方向に略垂直となる方向に移動するように配置する。これにより、長い距離でリニアリティがあり、高分解能の検出ができる。
(もっと読む)
光電センサ
【課題】光格子の解像度を改良すること。
【解決手段】相互に平行な監視ビーム18の場20を互いの間に形成する複数の光送信器14及び受光器26を備え、光送信器14及び受光器26にビーム成形光学系16、24が割り当てられる、光電センサ10の光学系16、24は、場20に対して斜め方向、特に垂直方向における該光学系16、24の相互重複をもたらす幾何学形状及び配置を含む。
(もっと読む)
画像相関変位センサ
【課題】簡便な構成でターゲット面と垂直な成分を含む方向の変位量を測定することができる画像相関変位センサを提供すること。
【解決手段】本発明の一態様にかかる画像相関変位センサは、照射光を出射する照射部130'と、ターゲット面300で生成したスペックルフィールドを複数回に亘って撮像するために用いられ、ターゲット面近傍においてターゲット面の法線方向から傾斜した光線路Aと、光線路B'と、光線路A,B'の少なくとも一方を偏向する素子110'と、を有する撮像部240と、光線路Aにおいて撮像することにより得られた複数画像と光線路B'において撮像することにより得られた複数画像とに基づいて、ターゲット面300の法線成分を含む方向の変位を計算する処理部200と、を備えている。
(もっと読む)
受動アライメントメンバを有した光学構成要素
【課題】電気的サブアセンブリに対して光学的サブアセンブリを受動的に位置合わせするための方法を提供する。
【解決手段】マシンビジョンシステムが、ある光学的サブアセンブリを、ある電気的サブアセンブリに対して位置付け、該マシンビジョンシステムが、該光学的サブアセンブリの画像をキャプチャし、該マシンビジョンシステムが、該画像を処理して、該光学的サブアセンブリ上に形成されたアライメントメンバを識別し、及び、該アライメントメンバの第2の位置に基づいて、該マシンビジョンシステムが、該光学的サブアセンブリの光軸の第1の位置を決定する。
(もっと読む)
伝熱管又は蒸発管の減肉状態監視装置
【課題】ボイラ設備の装置を分解あるいは開放することなく、フィンチューブの腐食及び減肉状況を評価することができる伝熱管又は蒸発管の減肉状態監視装置を提供する。
【解決手段】伝熱管又は蒸発管の減肉状態監視装置10Aは、伝熱管又は蒸発管の減肉状態を監視する監視装置であって、伝熱管又は蒸発管のフィン11に沿って移動する移動手段12と、前記移動手段12に設けられ、伝熱管又は蒸発管の表面の減肉状態をレーザ計測するレーザ計測手段13と、レーザ計測手段13にレーザ光を導入する導光路及び反射光を伝達する導出路を備えたケーブル手段14と、前記レーザ計測のデータを過去のデータ又は標準データと比較して、現在の減肉状態を判定する減肉状態判定手段とを具備する。
(もっと読む)
像内の構造の位置を決定する方法及び該方法を実施するための位置測定装置
【課題】基準点に対する像内の構造の位置を決定する方法、更に、この方法を実施するための位置測定装置を提供する。
【解決手段】対称中心を有する構造の基準点に対する像内の位置を決定する方法を提供し、本方法は、構造を含み、かつ基準点を有する像を準備する段階と、基準点に対する像の少なくとも1つの対称操作を実施し、それによって構造に対して合同である鏡像反転構造を有する少なくとも1つの鏡像が得られる段階と、構造と1つの鏡像反転構造又は2つの鏡像反転構造との間の少なくとも1つの変位ベクトルを決定する段階と、構造の位置を少なくとも1つの変位ベクトルから基準点に対する構造の対称中心の位置として計算する段階とを含む。更に、基準点に対する像内の構造の位置を決定するための位置測定装置を提供する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】複数の視差候補の中から最適な視差を精度よく選択することができる画像処理装置等を提供する。
【解決手段】画像取得部11は、同一被写体について視差のある2つの画像を取得する。特徴点候補取得部12は、画像取得部11により取得された一方の画像から特徴点候補を取得する。視差候補取得部13は、ステレオマッチングを行い、他方の画像から特徴点候補毎の視差候補をそれぞれ取得する。特徴点選択部14は、取得された特徴点候補の中から所定の条件を満たすものを特徴点として選択する。隣接点取得部15は、特徴点選択部14により選択された特徴点に隣接する隣接点を、特徴点毎にそれぞれ取得する。視差決定部16は、特徴点と、視差候補と、隣接点と、に基づいて、確率伝搬法によるアルゴリズムを用いた処理を実行し、各特徴点に対応する視差を決定する。
(もっと読む)
検査装置
【課題】ウェーハ上の欠陥分布を検査する表面検査装置において、欠陥検査と同時進行でウェーハの厚さとフラットネスを測定できるようにする。
【解決手段】本発明は、ウェーハを固定し、回転及び直線移動を行う搬送系と、前記直線移動の経路上に配置されたウェーハ上の欠陥の位置とサイズを特定する散乱光学系と、前記直線移動の経路であって、前記散乱光学系よりも前に配置されたフラットネス測定系と、を有することを特徴とする。
(もっと読む)
物体の表面プロファイルを測定する方法及び装置
【課題】エッジ(段差)近傍の表面プロファイルの測定結果を正確に取得することができる、物体の表面プロファイルを測定する方法を提供する。
【解決手段】物体の表面プロファイルを測定する方法であって、物体の表面の段差が走査方向に対して延在する第1の方向の情報を取得するステップと、前記情報に応じて、照射ビームに与える位相分布を設定するステップと、前記照射ビームで前記物体を前記走査方向に走査するステップと、を有する。
(もっと読む)
分布型光ファイバセンサ
【課題】高空間分解能で且つ高周波数分解能を有する分布型光ファイバセンサを提供することを課題とする。
【解決手段】本発明は、空間分解能に基づく第1パルス光f1と周波数分解能の逆数に基づく第2パルス光f2とを位相差θを設けて合成した検査光fを光ファイバ12の一端部12aに射出する検査光生成部26,27と、一端部12aから射出されるブリルアン散乱現象に係る光からスペクトルVを検出する検出部30と、ブリルアン周波数シフト量を計測する計測部40と、を備え、検査光生成部26,27は、位相差θが異なる複数の検査光fを生成し、検出部30は、ブリルアン散乱現象に係る光から各検査光fに対応するスペクトルVをそれぞれ求める検波部31と、スペクトルV同士を合成する合成部36と、を有し、計測部40は、合成スペクトルVSに基づいて前記周波数シフト量を計測することを特徴とする。
(もっと読む)
欠陥寸法測定装置、欠陥寸法測定方法、及びプログラム
【課題】撮像装置の光軸方向に対して高低差がある検査対象の欠陥の寸法を正確に測定する。
【解決手段】平面座標取得部302は、画像データに含まれる検査対象の欠陥を示す画素の平面座標を取得する。空間座標変換部305は、平面座標取得部302が取得した平面座標を、仮想空間に配置された検査対象の外観を表す3次元モデルの表面と平面座標が示す点に対応する仮想空間上の直線との交点を示す空間座標に変換する。仮想寸法算出部307は、空間座標変換部305が変換した複数の空間座標を用いて仮想空間における前記欠陥の寸法を算出する。
(もっと読む)
表面検査装置
【課題】角度検出感度を向上させるとともに、検出可能な角度範囲を広くする。
【解決手段】波長域が互いに異なる山形輝度分布が互いに重なり合うように帯状面光源を構成し、各波長域の撮影画像の該山形輝度分布に対応する画素値分布に基づいて検査面の角度を2段階で検出する。第1段階では、R、G、Bの画素値間の大小関係と曲線近似情報とに基づいて、光源面上周期内参照光位置xを決定し、第2段階では、明度の値と曲線近似情報とに基づいて、周期内参照光位置xがどの周期iに属するか、すなわち、周期始点位置Xiを求める。次いで参照光位置X=Xi+xを検査ラインでの検出角に変換する。
(もっと読む)
141 - 160 / 726
[ Back to top ]