
Fターム[2F065DD03]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 分解能向上 (726)
Fターム[2F065DD03]に分類される特許
61 - 80 / 726
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
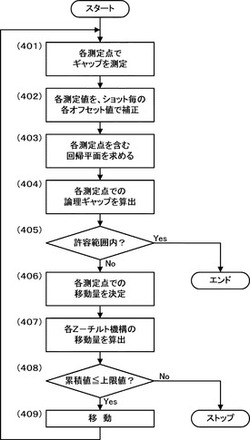
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
FBG光ファイバセンサ型ひずみセンサ

【目的】本発明は、ひずみセンサの構築に際して、FBGの多重化に時間多重化方式を用いたFBG光ファイバセンシング技術を使用して構築し、FBG光ファイバ型ひずみセンサを高密度に配置することが出来るセンサとなし、もって高密度のひずみ分布を詳細に、正確に計測できるひずみセンサを提供することを目的とする。
【構成】複数のFBGにつき所定間隔をあけて1本の光ファイバ上に配置した1本のセンサ本線を複数本用意し、複数本のセンサ本線を長手方向に向かい平行に並べると共に、いずれかのセンサ本線に配置されたFBGと、該FBGに隣り合う他のいずれかのセンサ本線に配置されたFBGとの間隔を任意の間隔で密になしえ、密な間隔で配置されたFBGについてそれぞれひずみ計測を可能とした、ことを特徴とする。
(もっと読む)
画像形成装置、パターン位置決定方法、画像形成システム
【課題】シート材の影響を抑制してテストパターンの位置を検出する画像形成装置を提供すること。
【解決手段】液滴の吐出タイミングを調整する装置100であって、テストパターンからの反射光を読み出す読み取り手段30と、均一パターンの印刷データを記憶する印刷データ記憶手段54と、均一パターンを記録媒体に印刷した後、テストパターンを均一パターン上に印刷するパターン形成手段52と、読み取り手段を等速で移動させる相対移動手段313と、テストパターンが形成された記録媒体に対し読み取り手段が相対移動しながら、テストパターンを光が横断する際に前記受光手段が受光した反射光の第1の検出データを取得する第1の検出データ取得手段617と、予め定められた上限値と下限値の間に含まれる第1の検出データにライン位置決定演算を施してテストパターンの位置を検出する位置検出手段616、を有する。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
構造物内空変位計測方法及びその装置
【課題】トンネルをはじめとした構造物の内空変位を計測し、該構造物の変状を監視する技術を提供すること。とくに工事中のトンネルや地下鉱山のトンネルのように粉塵が浮遊している空間に対しても、広範囲にわたって内空変位を計測しモニタリングできる方法を提供すること。
【解決手段】計測対象となる構造物の内側に内空変位センサである梁の一端を固定し、当該梁の表面にひずみ計測が可能な装置を設置し、当該装置により計測されたひずみから、当該構造物の鉛直方向および水平方向の変位を算出する構造物内空変位計測方法
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
(もっと読む)
塗布状態測定方法
【課題】測定対象物に塗布された塗布物質の塗布状態をより簡単に精度よく測定する。
【解決手段】測定対象物を撮像して測定対象物のスペクトル画像を取得する画像取得ステップS01と、画像取得ステップにより得られたスペクトル画像に基づいて、塗布物質の種類を判別する塗布物判別ステップS02と、画像取得ステップにより得られた前記スペクトル画像に基づいて、塗布物質の塗布量を測定する塗布量測定ステップS03と、を備える。
(もっと読む)
光ファイバセンサおよび光ファイバセンシング方法
【課題】測定精度を向上させた光ファイバセンサおよび光ファイバセンシング方法を提供すること。
【解決手段】パルス状のポンプ光を出力する光源と、前記ポンプ光が入力され、該ポンプ光によってブリユアン散乱光を発生するセンサ用光ファイバと、前記センサ用光ファイバから出力された前記ブリユアン散乱光を受光する受光器と、を備え、入力される前記ポンプ光のパルスの長さの1/2をΔz(m)、ピーク光強度をIp(mW)とすると、前記センサ用光ファイバは、長さをz(m)、伝送損失をa(dB/km)、ブリユアン利得係数gBと有効コア断面積Aeffとの比をgB/Aeff(m−1W−1)とした場合に、所定の式を満たすように長さzが設定されている。
(もっと読む)
ネイルプリント装置及び印刷制御方法
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
電気転てつ機のロック狂い検知器の位置調整冶具
【課題】電気転てつ機のロック狂い検知器の固定スリット部材の位置合わせを容易に行うことができる電気転てつ機のロック狂い検知器の位置調整冶具を提供する。
【解決手段】電気転てつ機本体に着脱可能で固定スリットが形成された固定スリット部材と、固定スリットに光を通過させる発光素子および受光素子と、を備えるロック狂い検知器の位置調整を行うための電気転てつ機のロック狂い検知器の位置調整冶具21において、電気転てつ機本体に着脱可能な本体部22と、固定スリット部材に着脱可能で本体部22に電気転てつ機の鎖錠カンの移動方向に移動可能に支持された移動部23と、移動部23と連結されて移動部23を鎖錠カンの移動方向に移動させるネジ部24と、を備えている。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
長さ測定装置
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法及び成形品
【課題】高精度に移動体の位置を計測可能な位置計測装置を提供する。
【解決手段】位置計測装置1は、周期的に高さが増減する目盛パターンが形成された目盛部30の高さ変位を、変位センサ10によって計測する。そして、この変位センサ10によって計測された高さの周期的な変位を、演算部20によって位置情報に演算して、移動体の位置を計測する。目盛部30の目盛パターンは、平面の組み合わせによって形成されるため、変位センサ10の出力電圧は平面の傾きに応じた直線を組み合わせた波形となる。
(もっと読む)
光軸調整システム
【課題】撮影画像における基準マーク画像のズレを考慮することにより光軸調整の誤差を低減する。
【解決手段】カメラ2と、タッチパネル式ディスプレイ3と、画像処理ECU4と、を備え、画像処理ECU4は、タッチパネル式ディスプレイ3の操作によりカメラ2により基準マークが撮影された撮影画像における基準マーク画像の位置が指示位置として指示されると、この指示位置と所定の基準位置との関係に基づいてカメラ2の光軸調整を行う光軸調整部41と、撮影画像の画面特性に基づいて撮影画像における基準マーク画像の位置ズレ量を算出する位置ズレ量算出部42と、位置ズレ量算出部42が算出した位置ズレ量により指示位置を補正する指示位置補正部43と、を備える。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
61 - 80 / 726
[ Back to top ]